直流換流站絕緣子除污機器人研制與應用
2017-06-05 14:15:22崔國強
山東電力技術 2017年2期
李 浩,崔國強
(國網山東省電力公司檢修公司,濟南 250118)
直流換流站絕緣子除污機器人研制與應用
李 浩,崔國強
(國網山東省電力公司檢修公司,濟南 250118)
隨著工業化水平的不斷提高,環境問題越來越嚴重,霧霾、酸雨、揚塵等惡劣天氣越來越頻繁,絕緣子污染程度日益嚴重,給電力設備的可靠運行造成巨大安全隱患。各種粉塵在風力、重力、電場力的作用下絕緣子設備的污穢快速增長,當天氣潮濕時,灰塵中的可溶性物質溶于水中,形成導電水膜,泄漏電流沿絕緣子的表面流過造成閃絡事故。針對現狀,研制直流換流站絕緣子除污機器人,該機器人能夠自動適應攀爬各種直徑的絕緣子,自動識別和跨越法蘭,可在絕緣子上完成行走、吹灰、清污、噴水、吹干等一系列工作,安全、高效、便捷、智能地完成絕緣子清掃除污工作,為直流輸電系統的穩定運行提供有力保障,具有很高的行業推廣價值,為絕緣子設備檢修工作標準化提供新途徑。
絕緣子;清掃除污;機器人
0 引言
銀東直流輸電工程是世界上首個±660 kV電壓序列的直流輸電工程,是國家“西電東送”和“外電入魯”的標志性工程,膠東站是山東省境內首座直流換流站,全年保持滿負荷4 000 MW運行,對山東省經濟發展和社會進步起著至關重要的作用。
目前絕緣子清掃主要有3種方法:停電清掃、帶電清掃和帶電水沖洗。帶電清掃和帶電水沖洗受設備安全距離、技術條件等因素限制較大,停電清掃是最基本最有效的方法。因此換流站年度的停電檢修除了設備定期試驗及缺陷消除外,絕緣子清灰工作也成為檢修工作的重點項目。由于絕緣子高達20余米,清掃絕緣子屬于高空特種作業,清灰難度大,作業效率低,而絕緣子又是換流站內最多的設備,數量多達上萬只,因此絕緣子清掃工作費時費力,很難在有限的檢修時間內保質保量完成工作。直流換流站絕緣子除污機器人的應用很好地解決了上述問題[1]。
1 除污機器人組成
絕緣子清掃除污機器人主要由抱緊裝置、彈性清掃機構、行走裝置、噴液裝置、清掃手臂等系統組成。
1.1 抱緊裝置
絕緣子履帶抱緊裝置,可適用于不同尺寸的絕緣子,自動感應壓力。
抱緊裝置由可調高度單元 (曲柄搖桿機構)、連桿、固定螺栓等構成,如圖1所示。抱緊裝置通過調節高度,使得絕緣子除污機器人行走機構緊貼絕緣子表面,以實現沿絕緣子的連續移動,實現對多種直徑絕緣子的適用性及對絕緣子連接法蘭的通過性。
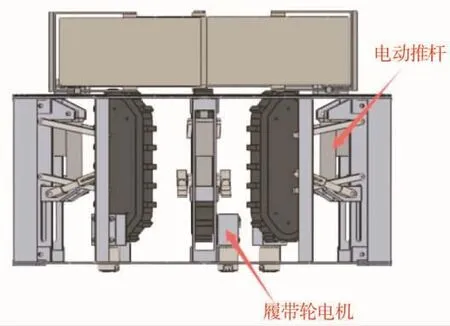
圖1 抱緊裝置3D圖
機器人工作時,抱緊裝置通過曲柄搖桿機構和連桿機構實現履帶輪的抱緊和擴張,由電動伸縮桿帶動滑塊上下移動,進而帶動履帶輪貼緊或松開絕緣子,同時也使機器人能適用于不同尺寸的絕緣子。伸縮桿通過螺桿傳動,具有自鎖功能,當意外斷電或出現其他故障時可保證機器人仍然呈抱緊狀態而不跌落。
1.2 彈性清掃機構
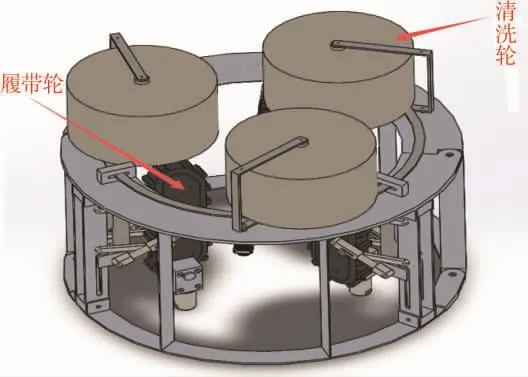
圖2 彈性清掃機構3D圖
絕緣子除污機器人彈性清掃機構由動力電機、清污刷、傳動軸、定位銷、軸承等部件構成,如圖2所示。安裝在彈性清掃機構支架,可根據絕緣子的直徑調節行走力度,更換不同材質、硬度、密度的清污刷,實現不同直徑絕緣子的清掃除污以及去除表面覆雪、覆冰。彈性清掃機構支架通過動力電機的轉動實現同步的角度轉變,以達到對絕緣子全面清掃的目的。
1.3 行走裝置
絕緣子除污機器人行走裝置由履帶、電機、防履帶側滑板、驅動輪、轉軸、飛輪、連桿、定位螺栓等構成。便于機器人在絕緣子上行走,行走裝置結構如圖3所示。
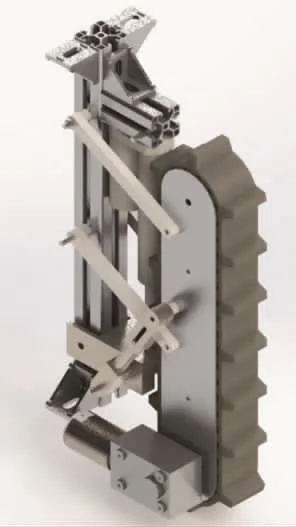
圖3 行走裝置3D圖
1.4 噴液系統
絕緣子除污機器人噴液系統可實現在絕緣子除污機器人工作時同步進行清洗劑及純凈水的切換噴射,是絕緣子清掃除污的重要步驟之一[2]。絕緣子除污機器人噴液系統由高壓噴嘴、連接管件、絕緣子除污機器人噴液系統控制柜構成。1臺絕緣子除污機器人一般配備3~8個高壓噴頭,由耐高溫高壓管連至絕緣子除污機器人噴液系統控制柜中,實現噴水和噴清洗劑切換。
絕緣子除污機器人噴液系統控制柜,設有高壓水泵、快裝接頭、耐高溫高壓管、逆止閥、安全閥、三通閥、減壓單元、流量控制器、延時控制器、過濾器、切換單元、無線控制器及接收單元、電流源模塊、安全空氣開關等。噴液系統工作流程如圖4所示,噴液系統構成如圖5所示。
1.5 清掃手臂
絕緣子除污機器人清掃手臂由動力電機、轉軸、傳動連片、傳動支架、滑塊、彈性清掃機構、彈性清掃機構支架等部件構成,如圖6所示。
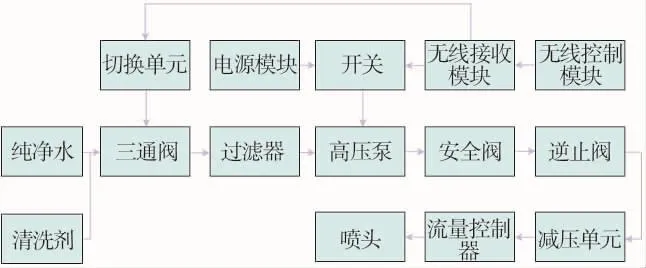
圖4 噴液系統工作流程
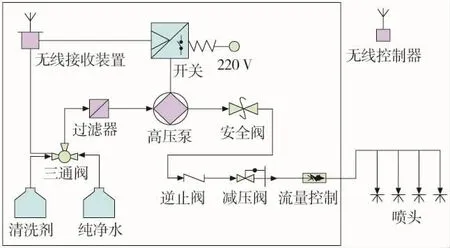
圖5 噴液系統
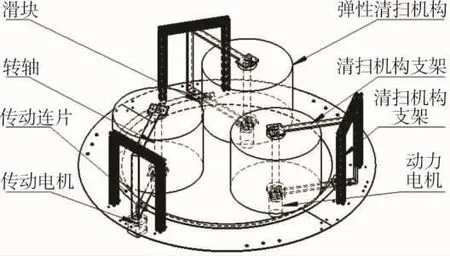
圖6 清掃手臂結構
彈性清掃機構支架通過動力電機的轉動來實現同步的角度轉變,以實現除污機器人對絕緣子的全面清掃。電機與其中1個支架的轉軸相連,各支架接有滑塊,每個滑塊與傳動連片鉸接,使圓環只能繞圓心轉動。當電機帶動其中1個支架轉動時,通過滑塊與傳動連片的傳動,可以實現其他支架的同步轉向,從而控制清掃手臂前端清污刷與絕緣子表面的接觸面積和壓力,達到更好地清掃除污效果[3]。同時可根據絕緣子的直徑來調節行走力度,更換不同材質、硬度、密度的清污刷,實現不同直徑的絕緣子清掃除污以及去除絕緣子表面覆雪、覆冰。
2 系統開發及軟硬件實現
直流換流站絕緣子除污機器人能夠自動適應攀爬一定直徑范圍的絕緣子,并且能夠自動識別和跨越法蘭。在攀爬的過程當中,通過高速旋轉的清污刷和高壓液體、氣體噴槍,安全高效地完成絕緣子清灰工作,機器人配備遙控器,從機器人識別特定絕緣子抱緊,到攀爬清灰等工作,均可由遙控器、人機結合智能控制,極大解放人力,通過自主開發設計的嚴謹代碼邏輯進行控制保護,在保證安全的情況下,大大提高工作效率。
2.1 系統組成
直流換流站絕緣子除污機器人可大體分為電源、控制、檢測以及執行4個模塊,系統構成如圖7所示。其中控制模塊包括機器人MCU的自動控制以及通過遙控器的人為控制。電源模塊為系統各部分提供電源,使用220 V交流供電取代電池供電,一方面可為機器人的清掃工作提供充足的電能,另一方面可減小機器人整體重量,從而減小對絕緣子的壓迫損害。220 V的交流電經過電源轉換器至12 V的直流電,使用單獨的電源模塊,12 V直流電至3.3 V的直流降壓集成在控制器電路板上,使用隔離降壓芯片將整個電源電路分割成兩個部分,分別給控制電路和電機供電,以減少干擾。執行模塊則包括電機、水泵等,執行機器人行走、吹灰、清污、噴水、吹干等一系列流程功能。檢測模塊包括壓力傳感器,紅外測距傳感器等。各模塊之間相互配合,以實現對絕緣子的智能清掃。
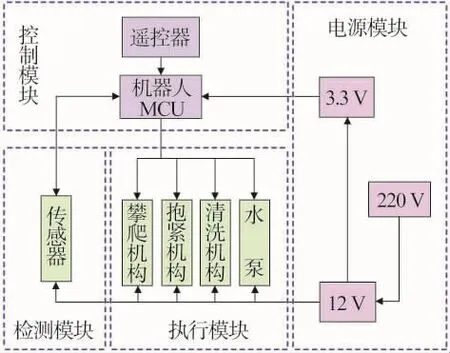
圖7 系統組成
2.2 系統工作流程
除污機器人工作流程如圖8所示,機器人通電后履帶輪將自動張開至最大,將機器人包合在絕緣子上并合上鎖扣,檢查無誤后遙控履帶輪縮緊,通過履帶上的壓力傳感器判斷履帶輪對絕緣子的壓力大小,當履帶輪與絕緣子貼合到設定壓力時,自動停止收縮,然后可手動或自動的開始執行履帶輪轉動、清污刷轉動、噴水、吹灰等工作,此時機器人進入清掃流程。與此同時,機器人的故障檢測系統也會開啟,當遇到履帶卡頓、電路短路等問題時將啟動報警裝置,通知維護人員檢測維修、排除故障。當機器人檢測自身已爬至絕緣子頂端時,將自動使履帶電機反轉,開始下行清掃,同時開啟氣泵噴出高壓氣體,將絕緣子上的殘留水分吹干。當機器人檢測自身已爬至絕緣子底端時,將停止工作并發出聲光提示,通知運檢人員清掃工作結束,準備進行下一根絕緣子的清掃。
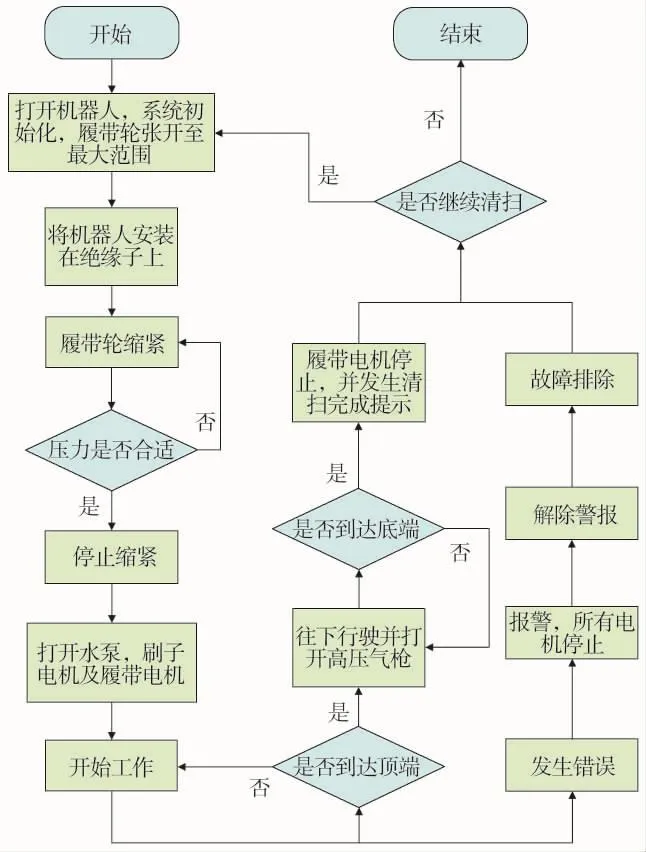
圖8 工作流程
3 系統技術性能
控制模塊以Cortex-M3內核的STM32F103x系列ARM處理器為中央處理器,搭載各種外圍驅動電路,如步進電機驅動電路、直流電機驅動電路、激光傳感器驅動電路、電源電路等。所有硬件電路集成在一個雙層PCB電路板上,留有外部接口。電路板表面噴涂三防漆來保護電路,保證電路板的性能,提高其壽命。將整個電路板封裝在鋁合金外殼中,以提高其防電磁干擾的能力。其中MCU的電源由B1205S-2W芯片進行隔離降壓得到,可有效減小電機對控制信號的干擾。
電機采用HB-57FS系列防水步進電機,可減小噴水清洗工作中對機器人自身的損害。通過配備不同減速比的齒輪箱可分別為清污刷轉動、履帶輪的轉動及伸縮提供動力。
機器人的電源選用明緯超薄電源LRS-200-12,交流輸入電壓通過開關切換10V/220V,直流輸出范圍為12V,0~17A。具有短路保護、過載保護、過電壓保護、過熱保護等防護功能。
清污刷可根據絕緣子的尺寸、結構選裝。清污刷采用尼龍、復合材料,質量輕、耐摩擦,不傷害絕緣子表面。配合水流對絕緣子進行清洗可取得很好的清掃除污效果。
履帶及配套履帶輪選用橡膠材料,耐摩擦,且對絕緣子抓緊力高,驅動輪則采用超高分子聚乙烯材料,質量輕,強度高。履帶尺寸根據絕緣子尺寸設計,保證機器人能跨過連接絕緣子的法蘭。
履帶輪抱緊絕緣子通過結合曲柄搖桿機構以及連桿機構來實現,由電動伸縮桿帶動滑塊上下移動,進而帶動履帶輪貼緊或松開絕緣子,同時也使機器人能適用于不同尺寸的絕緣子。伸縮桿通過螺桿傳動,具有自鎖功能,當意外斷電或出現其他故障時可保證機器人仍然呈抱緊狀態而不跌落。
3個清污刷支架可以通過1個電機的轉動來實現同步角度改變,實現全面清掃。電機與其中1個支架的轉軸相連,各支架接有滑塊,3個滑塊與圓環鉸接,圓環只能繞圓心轉動。當電機帶動其中1個支架轉動時,通過滑塊與圓環的傳動,可以實現另外兩個支架的同步轉動。
主體框架選用鋁合金材料,在保證強度的同時使其擁有著較輕的質量。機器人可對半打開,以便安裝在絕緣子上。兩部分通過合頁與搭扣連接。
4 結語
直流換流站絕緣子除污機器人的研制與應用,解決了目前國內換流站支柱絕緣子清灰的難題:降低絕緣子積灰程度,提高設備的絕緣水平,增強設備的運行穩定性[4]。
[1]孫斌,徐威,楊汝清.高壓絕緣子清掃機器人的動力學建模及分析[J].上海交通大學學報,2004,38(8):1 304-1 306.
[2]張建興.懸式瓷制絕緣子表面污穢程度預測方法的研究[D].保定:華北電力大學,2005.
[3]雷成華.便攜式輸電線路絕緣子清掃裝置的研制[J].機電信息,2015(9):58-59.
[4]王輝.淺談高壓絕緣子的維護與檢修技術[J].中國科技縱橫,2011(8):89.
Development and Application of DC Converter Station Insulators Decontamination Cleaning Robot
LI Hao,CUI Guoqiang
(State Grid Shandong Electric Power Maintenance Company,Jinan 250118,China)
With the continuous improvement of the level of industrialization,environmental issues and inclement weather,such as haze,acid rain and dust,have become more serious frequently.The degree of insulator pollution is becoming more and more serious,which results in a huge security risk to the reliable operation of power equipment.Under the action of wind force,gravity and electric field force,the pollution of insulator is increasing rapidly.When the weather is wet,the soluble substance in dust is dissolved in water, forming a conductive film, and the leakage current will flow along the insulator surface,resulting in flashover accident.Aimed at the present situation,a DC converter station insulator decontamination cleaning robot is developed which can automatically adapt to climb various diameters insulators, identify and across the flange,and can walk on the insulator,blow soot,purge,spray,blow dry and more.The insulator cleaning decontamination work can be completed safely,efficiently,conveniently and intelligently by the robot,which provides a strong guarantee for the stable operation of the HVDC system and a new way for the standardization of the insulator equipment overhaul work.So the robot should have a high overall industry application value.
insulators;decontamination cleaning;robot
TP242
A
1007-9904(2017)02-0011-04
2016-08-15
李 浩(1982),男,工程師,從事高壓交直流輸電系統運維檢修;
崔國強(1985),男,從事高壓交直流輸電系統運維檢修。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
保健醫苑(2022年5期)2022-06-10 07:46:12
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國生物醫學工程學報(2019年4期)2019-07-16 08:04:16
模具制造(2019年3期)2019-06-06 02:10:54
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
