一種小型可拆卸式全地形履帶車的設(shè)計
2017-06-07 08:21:47陳楠龐根蒂涂鵬飛董浩存
裝備制造技術(shù) 2017年2期
關(guān)鍵詞:設(shè)計
陳楠,龐根蒂,涂鵬飛,董浩存
一種小型可拆卸式全地形履帶車的設(shè)計
陳楠1,龐根蒂2,涂鵬飛3,董浩存1
(1.沈陽理工大學(xué)汽車與交通學(xué)院,遼寧沈陽110159;2.沈陽理工大學(xué)自動化與電氣工程學(xué)院,遼寧沈陽110159;3.武漢工程大學(xué)機電工程學(xué)院,湖北武漢430205)
為解決小區(qū)域內(nèi)搬運重物不便等問題,設(shè)計出一款單片機遙控、電機驅(qū)動的小型運貨履帶車。履帶車參考大型履帶戰(zhàn)車行駛方式,適用于全部地形下的行駛,承載物品的空間可以根據(jù)用戶的需要進行拆裝調(diào)節(jié)。
履帶車;全地形;可拆卸;電子控制
我國如今已經(jīng)步入了老齡化社會,據(jù)調(diào)查統(tǒng)計,2003年我國60歲以上老齡人口占總?cè)丝诒壤秊?5.59%,至2014年,這一比例增加到21.03%.當(dāng)市民特別是老年人購買了米面油糧等較大較重的生活物品,在經(jīng)過坡道樓梯等復(fù)雜地形會成為比較困難的一個問題。另外,各種貨物運輸站點、家庭野外出游等工作和生活的場所,也需要一些小型的搬運物品的輕便裝置。
目前,搬運物品爬樓梯等障礙的小型裝置有如下幾種:一是李冠群的新型電動自平衡爬樓車[1]與李佳玲的行星輪式便攜可變形多功能運貨上樓機[2],兩者都是通過行星輪結(jié)構(gòu)實現(xiàn)自平衡來解決爬樓的問題,但這些車體或機體只適用于爬樓梯,無法在平地及全地形行駛,而且需要人力驅(qū)動;二是馮鵬的智能樓梯平地兩用運貨小車[3],根據(jù)行星輪的結(jié)構(gòu)特點可以實現(xiàn)在平地與樓梯之間運動類型的轉(zhuǎn)換,但是對于較復(fù)雜路面例如泥地、石子路面等仍會出現(xiàn)行駛困難,且整車設(shè)計自重達(dá)75 kg,長度超過3 m,整體過于龐大,不適用于家庭等小區(qū)域的地方;三是張金玲等研究的全地形越野履帶車底盤[4],這款履帶車具備跨越普通城市道路所有路面障礙的能力,其底盤重25 kg,體積為800 mm×800 mm×800 mm,不可拆卸,普通用戶家庭存放不是很方便。檢索發(fā)現(xiàn),尚未有一種小型的、可拆卸的、適用于全地形搬運物品的履帶車。
鑒于此,本文設(shè)計了一款采用電子控制、具有可拆卸功能、可以在全地形下行駛的小型履帶車。履帶車可采用碳材料等輕量化的材料制造,整車自重約為15 kg,整車長925mm,寬550mm~750mm(在此范圍內(nèi)可調(diào)),高310mm,可承載40 kg的貨物。整個履帶車由機體部分(實現(xiàn)可拆卸功能)、電機、傳動及行駛部分(實現(xiàn)全地形行駛功能)、電子控制部分等三部分組成,整體的結(jié)構(gòu)如圖1所示。以下介紹各主要部分設(shè)計。
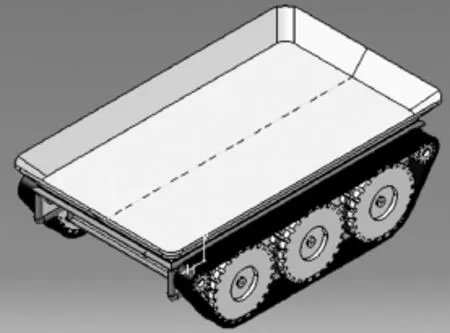
圖1 履帶車
1 機體部分
履帶車機體部分的設(shè)計,以增加受力、減小體積和自重作為重點,盡可能的增加履帶車的實用性,并且降低成本。履帶車機體部分體積為925 mm×550 mm×310 mm,由機架、底板、蓋板、載貨托盤等部件組成。
機架采用Φ20 mm的管制材料制成。在機架底部嵌入10 mm厚的底板,底板上有電動機、蓄電池以及齒形帶張緊輪支座等零部件的安裝孔,結(jié)構(gòu)如圖2所示。

圖2 機架及底板
履帶車的機體結(jié)構(gòu)如圖3所示。蓋板覆蓋在機架的上面,其上設(shè)計有等距離的圓孔,與載貨托盤下表面上的等距離凸圓柱一一對應(yīng)。履帶車存放時,可將載貨托盤從車上取下單獨存放,這樣余下的機體部分高度降低,可減少占用的存放空間。當(dāng)運載比重較小而體積較大的貨物時,還可將載貨托盤調(diào)節(jié)至適當(dāng)寬度來安裝,載貨寬度可調(diào)節(jié)到750mm.這一設(shè)計,實現(xiàn)了履帶車的可拆卸功能,易于存放,還可調(diào)節(jié)載貨托盤寬度來適應(yīng)不同體積的貨物。

圖3 蓋板及載貨托盤
2 電機、傳動及行駛部分
2.1 電機部分
履帶車的行駛部分為履帶式,全車由兩臺小型電機分別驅(qū)動兩側(cè)的履帶驅(qū)動輪,由電子同步裝置對電機輸出轉(zhuǎn)速進行同步,電機動力經(jīng)傳動機構(gòu)降速增扭后傳遞給履帶驅(qū)動輪,電源來自于充電電池。
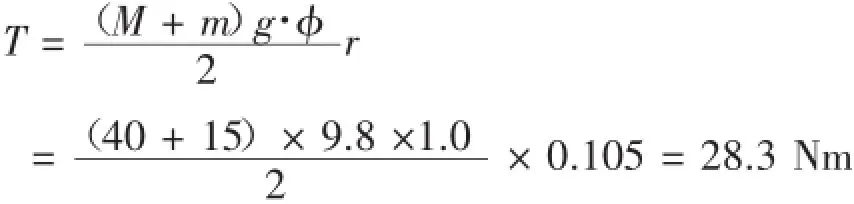
履帶車自重約為m=15 kg,設(shè)計載重M=40 kg,履帶輪直徑210 mm,一般橡膠履帶最大的附著系數(shù)Φ=0.8~1.0[5]
由雙電機進行驅(qū)動,因此履帶車行駛時每側(cè)履帶輪所需的驅(qū)動力矩T為[6]:
履帶車設(shè)計車速為v=0.5 m/s左右,根據(jù)整車的結(jié)構(gòu),選定傳動機構(gòu)的傳動比為i=4,選定安全系數(shù)為2,所需驅(qū)動電機的轉(zhuǎn)速n、功率P計算如下:
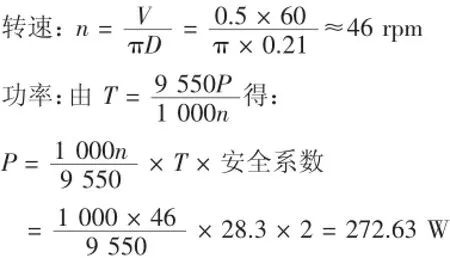
選定了如圖4所示臺松直流齒輪減速電機DC24V正反轉(zhuǎn)馬達(dá)調(diào)速。額定功率為250W~300W,選定減速比為10,額定轉(zhuǎn)速為180 rpm~360 rpm,自重為5 kg.

圖4 電動機
所選電機在250 W及以上功率的情況下工作,要求履帶車可以在這種情況下連續(xù)工作3 h以上,因此選擇了優(yōu)貝特鋰電池,工作電壓為24 V,容量為20 Ah,自重為2.8 kg,蓄電池尺寸為150 mm×150 mm×70mm.
2.2 傳動部分
傳動部分由一對開式螺旋錐齒輪、一對齒形帶輪3及齒形帶4組成,如圖5所示。一對螺旋錐齒輪1和2將電機的傳來的動力減速增矩并傳給前履帶輪,由齒形帶傳遞給后履帶輪。圓柱齒輪的傳動比i=4.
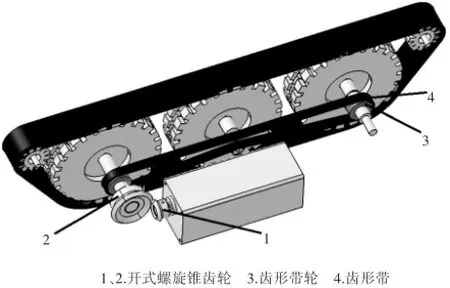
圖5 傳動部分
傳動部分的四輪驅(qū)動設(shè)計將最大限度的增加動力性和行駛穩(wěn)定性,通過調(diào)節(jié)傳動比將驅(qū)動履帶輪的基礎(chǔ)轉(zhuǎn)速控制在了0.5 m/s左右的范圍。
2.3 行駛部分
動力傳遞到履帶輪,由履帶輪帶動履帶完成履帶車的行駛,大履帶輪的直徑為210 mm,大履帶輪與小履帶輪之間履帶所形成的傾斜角度為55°.在履帶車的整個行駛過程中,將樓梯作為極端的障礙考慮,在此設(shè)計難點下進行分析設(shè)計。
樓梯是履帶車行駛的全地形中比較特殊的一種地形,現(xiàn)將其作為難點做出分析。根據(jù)我國《建筑樓梯模數(shù)協(xié)調(diào)標(biāo)準(zhǔn)》的規(guī)定[7]:普通樓梯踏步的高度a不能大于210 mm,同時不能低于140 mm,樓梯踏步的寬度b不能超過320 mm,同時不能低于220 mm,并且樓梯的高度和寬度應(yīng)該滿足2a+b小于等于600 mm.以步高170 mm、步寬240 mm的樓梯為例,其斜角約為35°,如圖6所示。
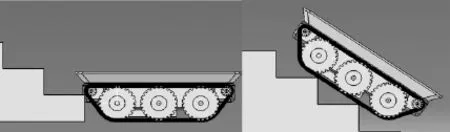
圖6 爬樓梯示意圖
在這個基礎(chǔ)上對履帶車進行爬樓梯時的穩(wěn)定性計算。履帶車的設(shè)計橫向跨度較大且高度較低,整車采用橫向?qū)ΨQ布置,攀爬樓梯不存在橫向傾翻的可能,而在縱向卻可能傾覆,因此需要對其上下樓梯的極限傾翻角進行計算。計算數(shù)據(jù)圖如圖7所示。
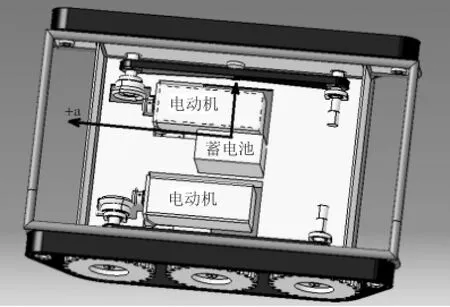
圖7 數(shù)據(jù)位置關(guān)系
已知一個電動機重G1=5 kg,距離履帶車幾何形心的縱向距離a1=50.01 mm,蓄電池重G2=2.8 kg,a2=-12.99 mm.整個履帶車的重心位置a計算如下:

履帶車重心高度hg=90 mm,最后一個支重輪軸線距離驅(qū)動輪軸線的水平距離lq=235 mm.履帶車可翻越的最大障礙角度為[8]:

履帶車翻越的最大障礙樓梯角度為65°,因此履帶車能穩(wěn)定翻越障礙,保證了在爬樓梯的極端條件下載貨行駛的適應(yīng)能力,保證了實現(xiàn)全地形功能。
3 電子控制部分
履帶車采用電機驅(qū)動、電子控制,空車或承載不超過額定的40 kg的情況下,用手持無線遙控器可控制其前進、轉(zhuǎn)向、倒退等功能,控制單元安裝在機體后方預(yù)留的空間。電子控制的硬件系統(tǒng)主要以89C52單片機為核心控制器,包含了主控制器模塊、電機驅(qū)動模塊、鍵盤模塊、紅外線通信模塊、電源模塊等。紅外線通訊、單片機處理、電機驅(qū)動和執(zhí)行電機,控制系統(tǒng)每次刷新時間是10 ms,完成上一次即刻進去下一次循環(huán)。
整套控制系統(tǒng)具體的運行流程為:打開機器的電源開關(guān),由人通過遙控發(fā)送開啟信號,將開啟信號傳輸?shù)絾纹瑱C,有單片機輸出控制電機驅(qū)動電路的開啟;之后便是控制履帶車運載貨物運動,通過遙控器發(fā)出的前進、后退和轉(zhuǎn)彎指令,經(jīng)過對接收的信號進行處理之后,單片機會相應(yīng)的輸出履帶車運動所需要的不同組別的電信號,分別控制電機驅(qū)動進而控制電機的電源輸入,最后起到控制電機運轉(zhuǎn)的功能,當(dāng)兩側(cè)電機驅(qū)動車運動時,碼盤編碼器會將兩側(cè)運動速度返回至主控制器,通過主控制器改變對電機驅(qū)動的信號消除轉(zhuǎn)速差,最后實現(xiàn)控制履帶遙控車運動的功能。當(dāng)然,如果需要調(diào)速,由單獨的控制開關(guān)發(fā)出快中低速信號直接控制電機驅(qū)動,最后實現(xiàn)對電機調(diào)速。系統(tǒng)總框圖如圖8所示。
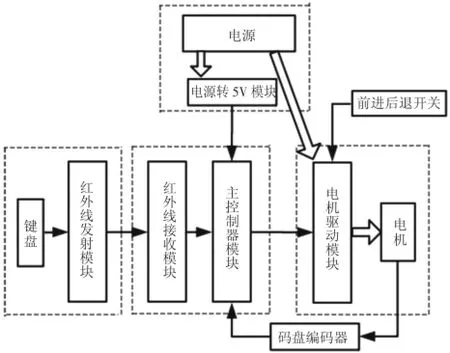
圖8 控制系統(tǒng)總框圖
這款可拆卸式全地形履帶車按1:3比例縮小的模型已制作完成并進行了實驗,可實現(xiàn)所設(shè)計的運動功能。由于考慮到制作成本,模型沒有采用碳材料等輕量化的材料制造,而是價格較低廉的亞克力板,故其載重量等指標(biāo)尚未驗證。
4 結(jié)束語
本文設(shè)計了一款可以在小區(qū)域內(nèi)運載貨物的履帶車,履帶車能穩(wěn)定的跨越草地、石子路、樓梯等障礙,載貨空間可拆卸的設(shè)計操作簡便,能攜帶大體積的物品。由于采用雙電機電子同步,因此在行駛前進時會有輕微的方向上的偏移且存在一定的噪音,有待進一步的改進。
[1]李冠群,宋其江,楊焱強.一種電動自平衡爬樓車的設(shè)計與研究[J].機器人技術(shù),2016,35(7):44-48.
[2]李佳玲,陳亦開,管珣,等.行星輪式便攜可變形多功能運貨上樓機的研制[J].湖北理工學(xué)院學(xué)報2015,31(4):17-20.
[3]馮鵬,石愛平,劉進,等.智能樓梯平地兩用運貨小車的設(shè)計[J].現(xiàn)代制造技術(shù)與裝備,2014(1):14-21.
[4]張金玲,陳浩,趙興輝,等.一種全地形越野履帶車底盤的設(shè)計[J].內(nèi)燃機與配件,2016,(9):1-3.
[5]唐經(jīng)世.工程機械底盤學(xué)[M].成都:西南交通大學(xué)出版社,2011.
[6]濮良貴,陳國定,吳立言.機械設(shè)計[M].9版.北京:高等教育出版社,2013.
[7]中華人民共和國國家計劃委員會.GBJ101-87建筑樓梯模數(shù)協(xié)調(diào)標(biāo)準(zhǔn)[S].北京:中國標(biāo)準(zhǔn)出版社,1987
[8]馮益柏.坦克裝甲車輛設(shè)計[M].北京:化學(xué)工業(yè)出版社2014.
Design of a Small Detachable all Terrain Tracked Vehicle
CHEN Nan1,PANG Gen-di2,TU Peng-fei3,Dong Hao-cun1
(1.Automobile and Traffic College,Shenyang Ligong University,Shenyang Liaoning 110159,China;2.Automation and Electrical Engineering College,Shenyang Ligong University,Shenyang Liaoning 110159,China;3.School of Mechanical&Electrical Engineering,Wuhan Institute of Technology,Wuhan Hubei 430205,China)
In order to solve the problem of area carrying heavy inconvenience,the design of a small cargo tracked vehicle with a single-chip remote control,motor drive.Track vehicles refer to large track chariot driving mode,suitable for all terrain under the driving,the space can be carried out according to the user's needs of the user's need for disassembly and assembly.
caterpillar vehicle;all terrain;removable;electronic control
U489
B
1672-545X(2017)02-0071-04
2016-11-05
2016年國家級大學(xué)生創(chuàng)新訓(xùn)練計劃項目(項目編號:201610144018)
陳楠(1994-),男,四川什邡人,本科,研究方向:內(nèi)燃機設(shè)計。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04