基于PEM的三自由度直升機(jī)模型辨識(shí)*
2017-06-09 08:53:29李亞帥邵宗凱
傳感器與微系統(tǒng) 2017年6期
李亞帥, 邵宗凱
(昆明理工大學(xué) 信息工程與自動(dòng)化學(xué)院,云南 昆明 650500)
基于PEM的三自由度直升機(jī)模型辨識(shí)*
李亞帥, 邵宗凱
(昆明理工大學(xué) 信息工程與自動(dòng)化學(xué)院,云南 昆明 650500)
針對(duì)三自由度(3-DOF)直升機(jī)平臺(tái)的特點(diǎn),提出了一種基于預(yù)測(cè)誤差法(PEM)的模型頻域辨識(shí)方法,建立了機(jī)理模型,運(yùn)用掃頻技術(shù)得到巡航飛行狀態(tài)直升機(jī)3個(gè)通道的輸入—輸出數(shù)據(jù);分析了偏相干函數(shù)和復(fù)合窗函數(shù),通過PEM進(jìn)行了模型的頻域辨識(shí),得到了狀態(tài)空間方程的待辨識(shí)參數(shù)和直升機(jī)的參數(shù)化模型。通過時(shí)域飛行和模型預(yù)測(cè)響應(yīng)的對(duì)比,驗(yàn)證了該模型的準(zhǔn)確性和該辨識(shí)方法的有效性。
三自由度直升機(jī); 預(yù)測(cè)誤差法; 頻域辨識(shí); 狀態(tài)空間方程
0 引 言
直升機(jī)具有垂直升降,空中懸停,低空低速和沿任意方向飛行的性能,因此在諸多領(lǐng)域有廣泛應(yīng)用。三自由度(3-DOF)直升機(jī)平臺(tái)是一個(gè)有著雙引擎雙螺旋槳、多功能的直升機(jī)平臺(tái),其控制系統(tǒng)是一個(gè)復(fù)雜的高階次、非線性、強(qiáng)耦合、開環(huán)不穩(wěn)定和多輸入多輸出(MIMO)系統(tǒng),是現(xiàn)代控制理論教學(xué)和控制策略方法研究的典型系統(tǒng)[1]。
一般對(duì)三自由度直升機(jī)的控制研究,在平衡位置對(duì)其進(jìn)行線性化,再利用線性控制方法設(shè)計(jì)控制器,例如,自適應(yīng)超螺旋魯棒控制器[2],無靜差預(yù)測(cè)控制器[3],自整定PID控制器等豐碩的研究成果[4]。但是這些研究均在平衡位置有較好的控制性能,脫離該位置后,直升機(jī)的魯棒性能和穩(wěn)定性能會(huì)明顯減弱,響應(yīng)誤差增大,運(yùn)動(dòng)性能急劇下降。因而,對(duì)三自由度直升機(jī)平臺(tái)建立更為精準(zhǔn)的模型,為提高其控制性能打下了堅(jiān)固的基礎(chǔ)。系統(tǒng)辨識(shí)是控制理論的一個(gè)分支,是利用已知先驗(yàn)信息和輸入—輸出數(shù)據(jù)建立系統(tǒng)數(shù)學(xué)模型的科學(xué),其簡(jiǎn)潔、高效、成本低廉的優(yōu)點(diǎn)正在逐漸代替?zhèn)鹘y(tǒng)的建模方法,為已經(jīng)存在的系統(tǒng)建立模型提供了有效方案[5]。
本文主要研究處于巡航狀態(tài)下的三自由度直升機(jī)平臺(tái)動(dòng)力學(xué)模型的系統(tǒng)辨識(shí)。首先通過機(jī)理分析,分別建立高度通道、俯仰通道和旋轉(zhuǎn)通道的參數(shù)化模型,根據(jù)牛頓—?dú)W拉方程建立狀態(tài)空間模型;然后進(jìn)行掃頻飛行實(shí)驗(yàn)數(shù)據(jù)采集,通過相干性分析和復(fù)合窗分析并運(yùn)用預(yù)測(cè)誤差方法得到狀態(tài)空間模型的關(guān)鍵參數(shù)的值;最后進(jìn)行時(shí)域驗(yàn)證,通過飛行實(shí)驗(yàn)數(shù)據(jù)和辨識(shí)模型輸出數(shù)據(jù)進(jìn)行對(duì)比,可以直觀反映出三自由度直升機(jī)的運(yùn)動(dòng)性能,表明了模型的準(zhǔn)確性。
1 三自由度直升機(jī)系統(tǒng)模型
三自由度直升機(jī)模型如圖1所示,其主要由支撐底座、平衡桿、平衡塊和2個(gè)螺旋槳組成。模型中平衡塊和2個(gè)螺旋槳分別位于平衡桿的兩側(cè),平衡桿通過萬向節(jié)接頭與支撐底座相連接,螺旋槳旋轉(zhuǎn)產(chǎn)生的升力可以使平衡桿以萬向節(jié)接頭作為支點(diǎn)做俯仰運(yùn)動(dòng),2個(gè)螺旋槳產(chǎn)生的速度差可以使平衡桿以萬向節(jié)為軸做偏航運(yùn)動(dòng)。2個(gè)螺旋槳作為直升機(jī)系統(tǒng)的動(dòng)力源分別由2個(gè)直流無刷電動(dòng)機(jī)進(jìn)行驅(qū)動(dòng)。通過改變平衡塊在平衡桿上的位置來平衡螺旋槳端的提升作用力和重力。
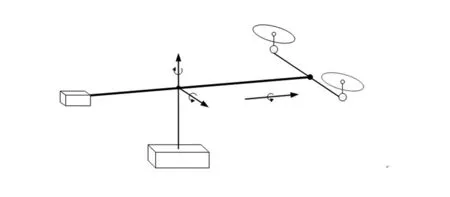
圖1 三自由度直升機(jī)模型
2 機(jī)理模型的建立
根據(jù)三自由度直升機(jī)系統(tǒng)模型的特點(diǎn),針對(duì)其3個(gè)軸(3個(gè)自由度),根據(jù)牛頓力學(xué)原理建立數(shù)學(xué)模型[6]。
2.1 高度軸
三自由度直升機(jī)的高度由兩個(gè)機(jī)翼的升力Ff和Fb的合力升力Fh和本體重力G決定,當(dāng)升力Fh大于重力G時(shí),本體上升;反之,本體下降。通過改變2個(gè)無刷直流電機(jī)的電壓vb和vf可以改變升力Fh,即有微分方程等式

(1)

2.2 俯仰軸
三自由度直升機(jī)在橫滾軸上所產(chǎn)生的橫滾角是由2個(gè)螺旋槳產(chǎn)生的升力Ff和Fb之差所決定的,若二者不相等,直升機(jī)本體將產(chǎn)生傾斜,升力之差的分力會(huì)使直升機(jī)圍繞支點(diǎn)旋轉(zhuǎn),因而可得到以下微分等式
(2)

2.3 旋轉(zhuǎn)軸
三自由度直升機(jī)旋轉(zhuǎn)角的動(dòng)力是由螺旋槳在旋轉(zhuǎn)運(yùn)動(dòng)時(shí)產(chǎn)生的水平分力所提供的。假如2個(gè)螺旋槳有升力差,對(duì)于微小的角度,2個(gè)螺旋槳為直升機(jī)提供一個(gè)大小為G的合力Fg,就可以在水平方向上產(chǎn)生一個(gè)旋轉(zhuǎn)方向的力矩,而使直升機(jī)產(chǎn)生旋轉(zhuǎn)加速度。旋轉(zhuǎn)方向的微分等式如
(3)
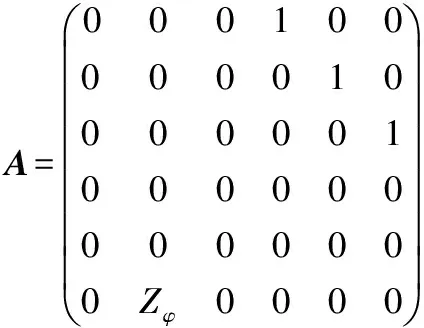
式中Jt為旋轉(zhuǎn)方向轉(zhuǎn)動(dòng)慣量;φ為旋轉(zhuǎn)方向的加速度。根據(jù)式(1)~式(3),在較小飛行角度和小干擾的條件下,對(duì)三自由度直升機(jī)進(jìn)行簡(jiǎn)化、線性化得到的狀態(tài)空間方程為[7]
(4)

3 頻域辨識(shí)
針對(duì)三自由度直升機(jī)的動(dòng)力學(xué)特性,進(jìn)行頻率掃描試驗(yàn),將獲取的輸入—輸出數(shù)據(jù)進(jìn)行復(fù)合窗分析,得到優(yōu)化的頻域響應(yīng),從而增加頻帶并降低頻譜估計(jì)中產(chǎn)生的隨機(jī)誤差。用子空間方法對(duì)狀態(tài)空間模型進(jìn)行初步辨識(shí),然后采用PEM對(duì)該灰箱系統(tǒng)進(jìn)行辨識(shí)得到優(yōu)化的系統(tǒng)模型。
3.1 相干函數(shù)分析
三自由度直升機(jī)系統(tǒng)的輸入端受噪聲影響較小,噪聲主要作用于輸出端,根據(jù)頻譜分析法,系統(tǒng)的頻率響應(yīng)可以表示為[8]
(5)
式中H(f)為輸入x和輸出y之間的頻率響應(yīng);Gxy(f)為輸入x和輸出y間的互頻譜密度;Gxx(f)為輸入x的自頻譜密度。相干函數(shù)γ是在某個(gè)頻率為f時(shí),輸出頻譜由輸入頻譜所引起的線性相關(guān)部分所占的比例的很好地度量,其定義為
(6)
3.2 復(fù)合窗函數(shù)分析
系統(tǒng)辨識(shí)的關(guān)鍵在于得到精準(zhǔn)的輸入—輸出數(shù)據(jù),復(fù)合窗函數(shù)可以降低頻譜估計(jì)中產(chǎn)生的隨機(jī)誤差,并且可以得到優(yōu)化的精度較高的頻率響應(yīng)[9]。
對(duì)于窗口長(zhǎng)度T的選擇,關(guān)系到模型帶寬和隨機(jī)誤差εγ的大小,頻域辨識(shí)隨機(jī)誤差的表達(dá)式為
(7)式中γxy為輸入和輸出的相干函數(shù);nd=Tγ/T為窗函數(shù)的個(gè)數(shù),Tγ為辨識(shí)時(shí)間。由式(7)可以看出,使用大長(zhǎng)度的窗口可以降低頻譜估計(jì)的隨機(jī)誤差,提高精度,但是會(huì)導(dǎo)致帶寬降低,使包含窗口的信息量減少。為此,本文采用了一種復(fù)合窗函數(shù)的的方法,其目標(biāo)函數(shù)J(f)為
(8)

將掃頻實(shí)驗(yàn)得到的辨識(shí)數(shù)據(jù),分別經(jīng)行5,10,15,20,25,30 s的分窗,通過對(duì)不同頻率采用不同長(zhǎng)度的窗函數(shù)的復(fù)合窗函數(shù)的方法可以在較寬范圍的頻帶中經(jīng)行高精度的頻域辨識(shí)。
3.3 預(yù)測(cè)誤差方法
PEM作為極大似然估計(jì)法的一種推廣,是在子空間算法得到一個(gè)初始辨識(shí)模型的基礎(chǔ)上,針對(duì)MIMO的狀態(tài)空間模型,可以得到一個(gè)更為精確的辨識(shí)模型。PEM不必得到數(shù)據(jù)概率分布的先驗(yàn)內(nèi)容,并解決了子空間辨識(shí)沒有按照最優(yōu)準(zhǔn)則運(yùn)算造成精度不高以及要保證輸入必須不受噪聲影響的限制,能夠很好地適用于非線性MIMO系統(tǒng)[10]。
子空間辨識(shí)方法是利用已知的輸入—輸出觀測(cè)序列確定系統(tǒng)狀態(tài)空間方程的各個(gè)矩陣參量和協(xié)方差矩陣,具體推算參閱文獻(xiàn)[11]。PEM運(yùn)用時(shí)間點(diǎn)k之前的輸入輸出數(shù)據(jù)運(yùn)算出k+1的值,在已知觀測(cè)量z(k)的基礎(chǔ)上,改變?chǔ)堑拇笮≈钡降玫骄秸`差最小值。PEM的原理式如式(9)所示
z(k)=f[z(k-1),…,z(1),z(0),u(k-1),…,u(1),η]+e(k)=f[zk-1,uk-1,η]+e(k)
(9)
符合預(yù)算條件的z(k)的數(shù)學(xué)期望即為“最優(yōu)”預(yù)測(cè)值,該值滿足
(10)

(11)
E=[ε(k)ε(k+1)…ε(k+n)]
(12)
預(yù)測(cè)誤差準(zhǔn)則表示為
(13)
模型的狀態(tài)空間方程和其頻率響應(yīng)矩陣由以下關(guān)系方程式表示
T(s)=C(sI-A)-1B+D
(14)

4 掃頻實(shí)驗(yàn)和辨識(shí)結(jié)果分析
三自由度直升機(jī)平臺(tái)配備一套數(shù)據(jù)采集系統(tǒng),其中包含一個(gè)三軸陀螺儀、一個(gè)三軸加速度計(jì)、一個(gè)PCI控制卡和一個(gè)飛行控制計(jì)算機(jī)。如圖2所示。

圖2 實(shí)驗(yàn)使用的三自由度直升機(jī)
本文采用掃頻技術(shù)采集飛行實(shí)驗(yàn)所得輸入數(shù)據(jù),實(shí)驗(yàn)在各個(gè)通道開環(huán)下進(jìn)行,運(yùn)用Matlab中的“Chrip”信號(hào)輸入頻率從0.1~5Hz的逐漸增加的激勵(lì)源。處于巡航狀態(tài)的直升機(jī)掃頻實(shí)驗(yàn)的部分?jǐn)?shù)據(jù)如圖3所示。
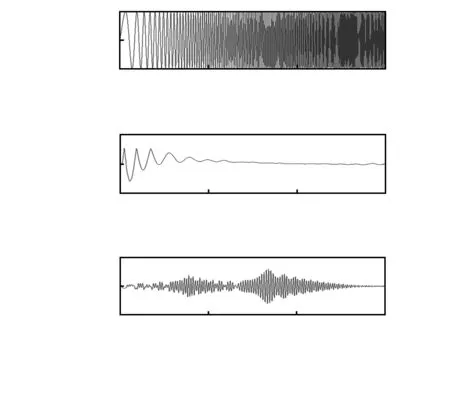
圖3 輸入和輸出掃頻數(shù)據(jù)
高度軸擬合率最高的3個(gè)迭代次數(shù)分別為5,6,7次,三者對(duì)應(yīng)的擬合率分別為85.43 %,81.26 %,77.01 %,各擬合次數(shù)的預(yù)測(cè)誤差部分?jǐn)?shù)據(jù)如圖4所示。
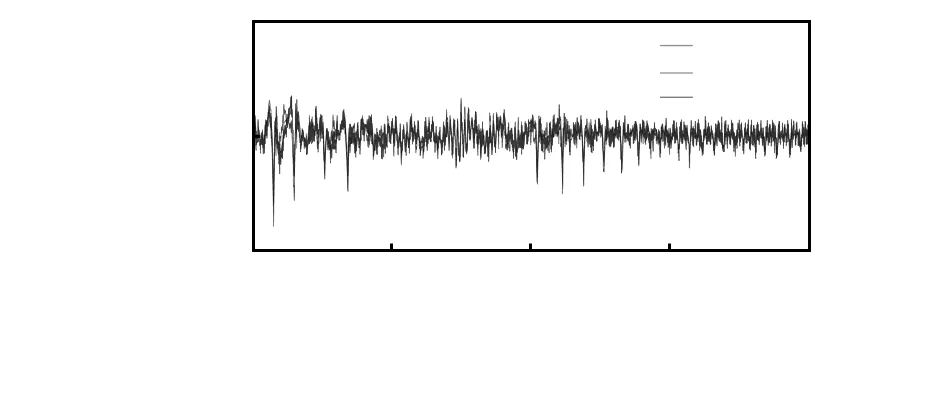
圖4 不同迭代次數(shù)的誤差
圖5為實(shí)際飛行數(shù)據(jù)與辨識(shí)模型得到的頻率響應(yīng)的參照對(duì)比圖。從圖中可以看出,在高頻和低頻區(qū)域內(nèi),相關(guān)性相對(duì)較差,但是在中頻區(qū)域,辨識(shí)模型和實(shí)驗(yàn)數(shù)據(jù)具有很好地一致性。
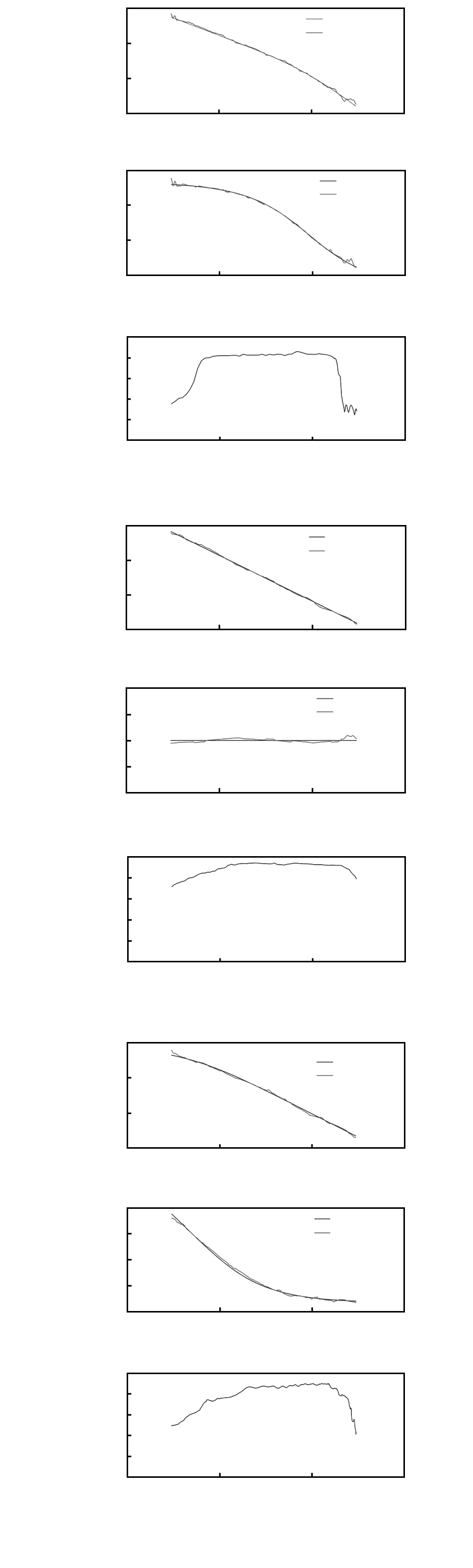
圖5 各個(gè)通道的頻率響應(yīng)
通過辨識(shí)得到的狀態(tài)空間方程結(jié)果為

5 時(shí)域飛行驗(yàn)證
時(shí)域飛行驗(yàn)證是檢驗(yàn)所辨識(shí)出的模型的一種有效方法。在確保各個(gè)部件和飛行條件沒有改變的基礎(chǔ)上,重新采集直升機(jī)平臺(tái)的一組輸入—輸出數(shù)據(jù),將該輸入數(shù)據(jù)作為辨識(shí)模型的輸入值,得到相對(duì)應(yīng)的輸出數(shù)據(jù),將實(shí)際輸出數(shù)據(jù)和辨識(shí)模型預(yù)測(cè)輸出數(shù)據(jù)進(jìn)行對(duì)比[12]。結(jié)果通過圖6可以看出,曲線走勢(shì)基本一致,即三個(gè)通道的實(shí)際飛行輸出和辨識(shí)模型的預(yù)測(cè)輸出均較為吻合。

圖6 實(shí)際輸出和預(yù)測(cè)輸出比較
6 結(jié) 論
本文首先對(duì)三自由度直升機(jī)平臺(tái)進(jìn)行了機(jī)理建模,然后通過飛行掃頻試驗(yàn)得到巡航狀態(tài)下的輸入—輸出數(shù)據(jù),對(duì)數(shù)據(jù)進(jìn)行了相干函數(shù)分析和復(fù)合窗分析,通過頻域預(yù)測(cè)誤差辨識(shí)方法得到了狀態(tài)空間的未知參數(shù)。通過時(shí)域飛行驗(yàn)證,可以看出飛行輸出數(shù)據(jù)和模型預(yù)測(cè)數(shù)據(jù)有很好地一致性,證明了本文辨識(shí)模型所運(yùn)用的方法是有效可行的;對(duì)其它模態(tài)的三自由度直升機(jī)的系統(tǒng)辨識(shí)有一定的借鑒作用,為直升機(jī)平臺(tái)飛行控制器的設(shè)計(jì)奠定了良好的基礎(chǔ)。
[1] Liu Hao,Xi Jianxiang,Zhong Yisheng.Robust hierarchical control of a laboratory helicopter[J].Journal of The Franklin Institute,2014,351(1):259-276.
[2] Plestan Franck,Chriette Abdelhamid.A robust controller based on adaptive super-twisting algorithm for a 3DOF Helicopter[C]∥Proceedings of the IEEE Conference on Decision and Control,Maui, Hawaii,USA,2012:7095-7100.
[3] 紀(jì)明達(dá),李德偉,席裕庚.三自由度直升機(jī)的無靜差預(yù)測(cè)控制[J].控制工程,2014,21(1):116-119,124.
[4] Boubakir Ahsene,Labiod Salim, Boudjema Fares,et al.Design and experimentation of a self-tuning PID control applied to the 3DOF helicopter[J].Archives of Control Sciences,2013,23(3):311-33.
[5] 劉金琨,沈曉蓉,趙 龍.系統(tǒng)辨識(shí)理論及MATLAB仿真[M].北京:電子工業(yè)出版社,2013:1-9.
[6] Chabir Alaa,Boukhnifer Moussa,Bouteraa Yassine,et al.Modelling and fixed order robust control of aerial vehicle:Simulation and experimental results[J].The international Journal for Computation and Mathematics in Electronic Engineering,2016,35(3):1064-1085.
[7] Zhang Ju,Yu Rong.Fast model predictive control of 3-DOF helicopter[C]∥26th Chinese Control and Decision Conference,Changsha,2014:396-3401.
[8] 王 斑,詹 浩,黃 晶.旋轉(zhuǎn)機(jī)翼無人機(jī)巡航狀態(tài)飛行力學(xué)模型辨識(shí)[J].飛行力學(xué),2014,32(2):179-182,188.
[9] 劉 鵬,武 哲.改進(jìn)的頻域辨識(shí)方法及其在直升機(jī)建模中的應(yīng)用[J].控制理論與應(yīng)用,2011,28(12):1747-1753.
[10] 李頂根,劉 剛.基于PEM與子空間方法的汽油機(jī)空燃比動(dòng)態(tài)模型辨識(shí)[J].內(nèi)燃機(jī)學(xué)報(bào),2012,30(3):248-253.
[11] 宋彥國(guó),孫 濤.旋翼飛行器飛行動(dòng)力學(xué)系統(tǒng)辨識(shí)建模算法[J].南京航空航天大學(xué)學(xué)報(bào),2011,43(3):387-392.
[12] 申 輝,方勇純,孫秀云,等.基于切換模型的無人直升機(jī)偏航通道系統(tǒng)辨識(shí)方法[J].模式識(shí)別與人工智能,2015,28(2):148-154.
邵宗凱(1973- ),男,通訊作者,博士,副教授,主要從事智能信息處理、電機(jī)智能控制等方向研究工作,E—mail:670416210@qq.com。
Model identification of 3-DOF helicopter based on PEM*
LI Ya-shuai, SHAO Zong-kai
(Faculty of Information Engineering and Automation,Kunming University of Science and Technology,Kunming 650500,China)
Aiming at the characteristics of the three degree of freedom(3-DOF)helicopter platform,a frequency domain identification method based on prediction error method(PEM)is proposed.Mechanism model is constructed,and by using frequency sweep flight technique obtain the input and output data of three channels.Partial coherence function analysis and composite window function analysis are carried out in the system.The identification parameters of state-space equation and the parametric model of helicopter are obtained by prediction error method.It can be verified that the model is accurate and effective through comparison of model prediction response and real flight in time domain.
3-DOF helicopter; prediction error method(PEM); frequency identification; state-space equation
2016—06—16
云南省科技計(jì)劃資助項(xiàng)目(2015ZC005)
10.13873/J.1000—9787(2017)06—0049—04
V 212.4
A
1000—9787(2017)06—0049—04
李亞帥(1991- ),男,碩士研究生,研究方向?yàn)轱w行器的建模與控制。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
