基于TMS320F28335的伺服系統數字化速度環設計
2017-06-10 00:19:42馬蓓麗楊國文
科技創新與應用 2017年16期
馬蓓麗+楊國文
摘 要:針對傳統伺服系統模擬速度環難以實現高精度高性能的控制要求,文章設計并闡述了數字化速度環系統的結構原理與硬件實現。系統采用LTC1821芯片為數模轉換(D/A)器件,以DSP芯片TMS320F28335為核心控制器,選用光纖陀螺儀作為速度反饋裝置,搭建高精度速度環伺服跟蹤平臺。仿真實驗證明,通過DSP軟件設計與調試,運用增量式比例積分(PI)調節算法,該系統具有響應速度快,低超調和閉環精度高等優點。
關鍵詞:伺服系統;速度環;D/A轉換;PI算法
引言
作為伺服控制系統非常重要的組成部分,速度環要求具有高精度、快響應、強抗干擾性等良好的控制性能,以實現伺服系統快速準確的定位與跟蹤。對于速度環伺服系統設計,其轉速控制要求有兩個方面:在給定的最高轉速和最低轉速的范圍內,實現不同轉速的調節;以一定的精度在所需轉速上穩定運行,在各種可能的干擾下不允許有過大的轉速波動[1]。
為實現高精度的數字化速度環設計,本文提出使用16位D/A轉換芯片LTC1821為核心的速度環伺服跟蹤系統,該芯片實現高精度數字量到模擬量的輸出功能,具有高精度、低噪聲、快速建立電壓輸出及強抗干擾特性,可完成控制需求;同時搭配使用數字信號處理器TMS320F28335為控制器[2],軟件設計控制LTC1821,以實現系統高精度數字化功能。
1 伺服速度環系統框架
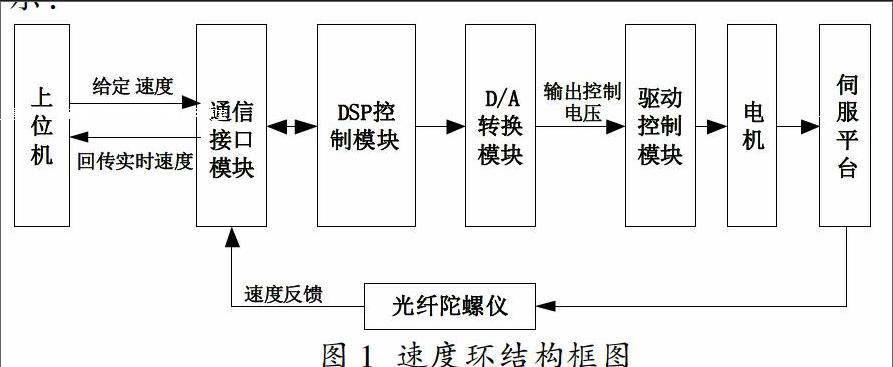
該系統硬件可分為DSP控制模塊、D/A轉換模塊、驅動控制模塊、通信接口模塊和電源模塊等組成。其結構框圖[3]如圖1所示:
本系統首先利用光纖陀螺儀作為速度反饋裝置,DSP芯片內置的SCI模塊可采集陀螺信號,提供轉臺的角度反饋數據,同時進行DSP軟件算法搭建速度環PI控制器,實現系統的高精度速度閉環[4];其次D/A轉換模塊將DSP運算形成的數字信號控制量轉換成模擬信號輸出至驅動模塊,實現電機的轉速控制;最后為實現DSP芯片與外部設備的數據傳輸,通過通信接口模塊實現通訊,DSP可接收給定速度命令,同時將當前實時速度值及各種故障狀態回傳,實現對整個系統的控制監控。
2 硬件設計
2.1 D/A轉換模塊
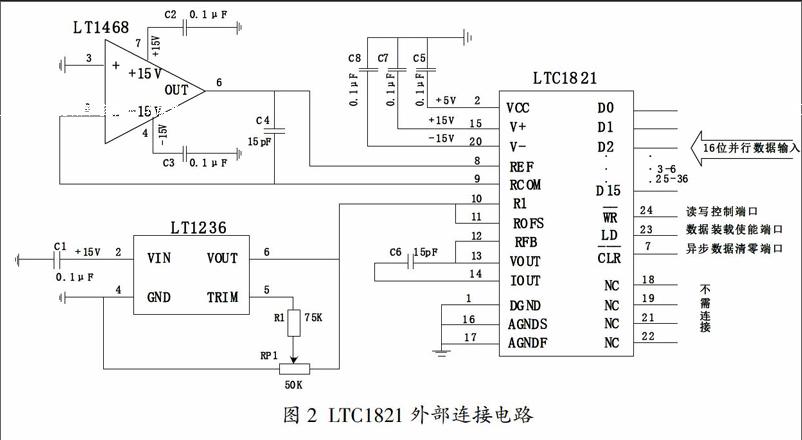
DAC芯片選用凌特公司生產的16位并行數字接口、高精度、快速建立的電壓輸出型數字模擬轉換器LTC1821。LTC1821有兩種工作模式,單極性輸出模式0V至10V或者0V至-10V,和雙極性輸出模式-10V至10V;高精度特性,在整個工業溫度范圍內,其積分非線性和微分非線性不超過1LSB;具有超快速建立性能,在滿度輸出范圍為10V時,LTC1821輸出達到1LSB的時間小于2us;具有異步輸入清零功能,引腳異步輸入CLR置低電平時,LTC1821輸出復位到零[5]。其外部連接電路應用如圖2所示。
電路設計中,LTC1821工作在雙極性工作模式,輸出電壓-10V至10V,選用芯片LT1236提供穩定的高精度基準電壓10V;電容C6為芯片內部運放的反饋電容(單極性模式22pF,雙極性模式15pF),用作頻率補償,減小內部電路產生的相移,避免產生自激震蕩,以保持運放的穩定;RCOM引腳連接芯片內部的兩個電阻的中間點,LT1468提供REF引腳驅動[6]。
2.2 DSP控制設計
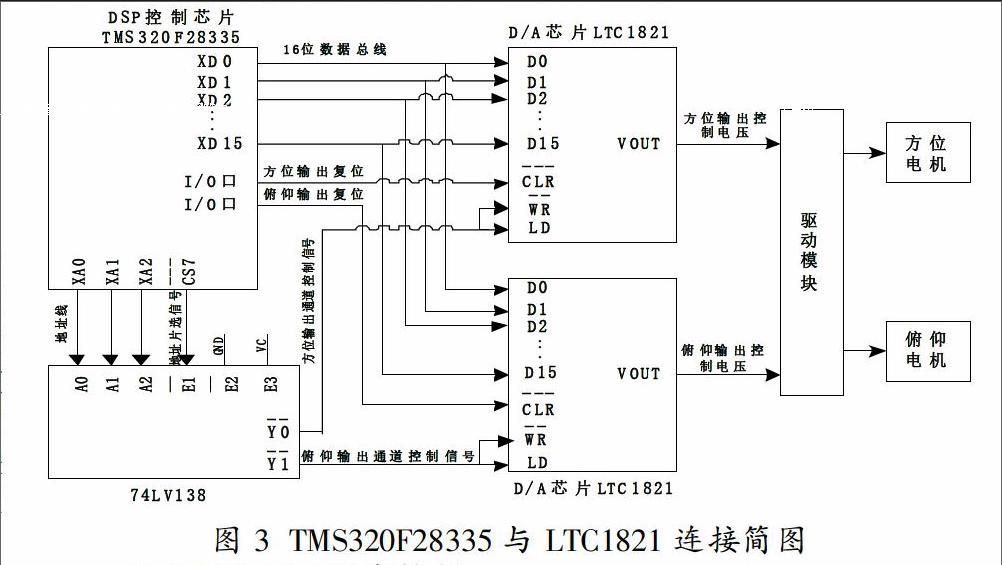
本系統使用的TI公司的TMS320F28335芯片是具有浮點運算單元的高性能數字信號處理器,片上資源豐富,可滿足伺服系統更快更準的控制需求[7]。文中要求完成方位和俯仰兩路速度的高精度控制,DSP控制芯片TMS320F28335與D/A轉換芯片LTC1821之間的硬件連接設計[8]如圖3所示。
2.2.1 LTC1821時序控制
LTC1821是具有配備輸入寄存器和DAC寄存器兩個16位寄存器的雙緩沖結構。當引腳WR拉到低電平時,輸入數據加載到LTC1821的輸入寄存器;當引腳LD拉到高電平時,DAC寄存器被更新,進而DAC輸出數據被更新。本文中,將引腳WR與LD短接,直接與74LV138的譯碼信號輸出端,作為控制LTC1821的時序控制端口。在控制信號輸出的下降沿,輸入數據被寫入LTC1821的輸入寄存器,在上升沿DAC寄存器被更新。引腳CLR低電平時,LTC1821復位到0V輸出[9]。
2.2.2 TMS320F28335與LTC1821間接口設計
系統中,將LTC1821的16位數據線D0-D15與DSP的XD0-XD15連接,實現16位并行數據輸入;選用DSP的I/O端口控制LTC1821的CLR引腳,高電平時LTC1821處于正常工作模式下,拉至低電平則復位清零;LTC1821只可輸出單路模擬電壓值,要同時實現方位和俯仰雙路電壓控制,電路中需放置兩個LTC1821芯片,通過TMS320F28335的地址線XA0、XA1和XA2和地址片選信號CS7,連接74LV138芯片進行地址譯碼,產生兩路LTC1821的選通控制信號Y0和Y1[10];DSP程序編寫中,可分配方位和俯仰數字控制電壓的地址,當在兩個地址分別寫入方位或俯仰數據,引腳Y0或Y1變為低電平,對應的方位或俯仰LTC1821芯片輸出相應的控制電壓模擬量[11]。其時序設計示意圖如圖4所示。
3 軟件設計實現
根據PI控制原理,比例增益系數P會對系統的精確度和剛性有影響,比例增益越大,系統的響應速度越快,但會帶來超調和震蕩,而積分增益系數I則可消除系統存在的穩態誤差,提高系統的閉環精度。PI算法分位置式和增量式兩種,本系統軟件設計中采用增量式PI控制算法。兩者相比,位置式PI算法輸出直接對應對象的輸出,對系統影響較大,而增量式PI算法輸出的是控制量的增量,若系統出現故障,誤動作影響較小;位置式PI算法的控制輸出與整個過去的狀態有關,使用的是誤差的累加值,而增量式PI算法,只與當前時刻和上一時刻的誤差有關,其累積誤差相對更小[12][13]。
3.1 增量式PI算法
系統中,設ierror(k)為第k次采樣時刻的速度誤差值,Sumierror(k)為前k次采樣時刻的速度誤差累加和,Kp為比例系數,Ki為積分系數,U(k)為在第k-1次采樣時刻輸出控制量,則該系統的位置式PI算法表達式為:
U(k)=Kp*ierror(k)+Ki*Sumierror(k)
=Kp*ierror(k)+Ki*?撞■■ierror(i) (1)
其中,k為采樣序號,k=0,1,2,…;ierror(k)為系統在第k次采樣時刻的誤差值,ierror(k-1)為在第k-1次采樣時刻的誤差值。
遞推出第k-1次采樣時刻輸出控制量,表達為:
U(k-1)=Kp*ierror(k-1)+Ki*?撞■■ierror(i) (2)
兩式相減可得:
U(k)-u(k-1)=Kp*[ierror(k)-ierror(k-1)]+Ki*ierror(k) (3)
即可得增量式PI算法的表達公式:
U(k)=u(k-1)+Kp*[ierror(k)-ierror(k-1)]+Ki*ierror(k) (4)
由上式可看出增量式PI控制的輸出計算,只與當前時刻和上一時刻的誤差有關,與位置式PI算法相比,其累積誤差相對較小,軟件設計時運算量相對較小;另外,其輸出的是控制量增量,閉環響應速度更快,精度更高[14]。
3.2 軟件實現
本速度環系統的增量式PI控制器軟件設計中[15][16],設定控制周期1ms,計算速度誤差ierror(k),即系統當前速度與目標速度的差值:
ierror(k)=Vo(k)-Vb(k) (5)
式中,Vo(k)為第k次采樣時刻的系統給定目標速度,Vb(k)為當前系統實測速度。利用公式(4),經過PI算法形成控制信號的數字量,送給D/A輸出模擬控制量完成一個控制過程,其軟件流程圖如圖5。
4 仿真結果與分析
以本文設計的系統平臺進行實驗并仿真,選取合適的P和I參數,由上位機發送目標速度指令,使伺服轉臺由當前速度快速響應至目標速度并穩定閉環。實驗波形曲線如圖6和圖7所示,圖6為速度響應曲線與目標速度6000的對比圖,圖7為誤差曲線。
仿真結果顯示,系統PI算法速度響應的峰值時間約25ms,調節時間約50ms,超調量可控制在15%以下,速度穩定后的閉環精度可達0.1%。實驗結果顯示,該系統在增量式PI的軟件算法下,可快速穩定的實現速度閉環,具有比較理想的控制效果。
5 結束語
本文介紹了基于LTC1821的數字化速度環系統,以處理器TMS320F28335與DAC芯片LTC1821進行了硬件設計,同時通過DSP內部軟件編程完成增量式PI算法。試驗證明該系統可實現高精度快速準確的速度閉環,以及一定轉速范圍內不同轉速的調節。
參考文獻
[1]任潤柏,周荔丹,姚鋼.TMS320F28X源碼解讀[M].北京:電子工業出版社,2010.
[2]陳光偉,向中凡.基于TMS320F2812的最小系統設計[J].微型機與應用,2010,29(12):49-51.
[3]陳永剛,閻秋生.基于速度環增益調度PI算法的直線電機控制系統設計[J].制造業自動化,2013,35(6):107-113.
[4]陳伯時.電力拖動自動控制系統-運動控制系統[M].北京:機械工業出版社,2010.
[5]喬敏娟,韓文波,劉瑩瑩,等.基于DSP的無刷直流電機閉環控制系統的設計[J].計算機與現代化,2014,221(1):206-210.
[6]韋宏利,李金榮.基于LS052A-Cb的無刷直流電機的控制系統設計[J].機械與電子,2016,34(2):68-71.
[7]韓海云,劉軍,秦海鴻,等.永磁同步電機伺服系統速度環優化設計[J].現代雷達,2013,35(1):63-67.
[8]白云,郭陽寬,祝連慶,等.基于DSP的無刷直流電機速度環控制系統設計[J].電子產品世界,2013,20(1):34-36.
[9]楊金寶,楊樺,王楠,等.數控變速調焦控制電路的設計[J].光電技術應用,2014,29(1):68-70,79.
[10]李紅衛,劉昊,李勇臻.基于TMS320F28335的雷達伺服系統的設計與實現[J].電子設計工程,2013,21(1):170-172,176.
[11]許煒,余曉華,闕宇瀟.基于TB6551FG正弦波驅動的無刷直流電機控制系統研究[J].機電信息,2013(73):61-63.
[12]叢爽,魏學云,鄧科,等.陀螺穩定平臺速度環的離散模型參考自適應控制[J].信息與控制,2014,43(3):287-292.
[13]韓海云,劉軍,秦海鴻,等.永磁同步電機伺服系統速度環優化設計[J].現代雷達,2013,35(1):63-67.
[14]徐曉霞.機載光電跟蹤系統的模糊PID控制[J].電子設計工程,2012,20(2):108-111.
[15]楊鵬,王飛,賈春奇,等.無刷直流電機閉環控制仿真系統的研究[J].微電機,2013,46(11):76-78.
[16]趙正黎,于惠鈞,張發明,等.基于模糊PID控制的直流電機調速系統[J].湖南工業大學學報,2015,29(2):38-43.
作者簡介:馬蓓麗(1985-),女,河南省輝縣市,碩士,工程師,研究方向:伺服系統軟件控制設計。