基于AVR單片機的智能掃地機器人的設計
2017-06-10 19:29:39孔德平
科技創新與應用 2017年16期
關鍵詞:智能
孔德平
摘 要:掃地機器人主要由移動機構系統、感知系統、吸塵系統、控制系統、遙控系統五部分組成,通過這五大系統,可以實現室內的智能清掃工作的完成。在感知系統中運用到了分布于小車兩側的光電傳感器,這樣可有效把握好路徑的選擇并且能夠很好的避開障礙;移動機構系統采用兩個360度轉動的伺服電機,這樣在行走以及轉向的情況下,可以最大做到精確;控制系統使用AVR單片機作為控制芯片;智能掃地機器人在行走過程中采用迂回前進,避開障礙的行走策略,同時可以接收無線遙控模塊的指令,根據指令作出相應的反應。
關鍵詞:掃地;機器人;智能
前言
智能掃地機器人是全自動或半自動機器,一定程度上代替了人工,解放了勞動力,并且節約了時間。掃地機器人包含了傳感器技術,單片機控制技術,移動技術等,利用這些技術可以使機器人很好的實現自動避障,并且較為精確轉彎和走直線,這樣就可以解決掃地機器人一次全面清掃的功能。
1 智能掃地機器人結構設計
1.1 整體布局
機器人的結構主要由感知機構、移動機構、吸塵機構以及車體組成,機器人的前輪采用差動式驅動,后輪采用隨動輪。基于機構和控制的復雜性,機器人使用圓形狀結構,圓形狀結構的最大優勢就是控制起來簡單,運動起來不易和障礙物發生碰撞。車體前端兩側采用兩個光電傳感器,這樣就有四種組合方式,也就是有四種狀態,這樣就可以識別一切障礙物,不會有盲點。
1.2 移動機構
移動系統是由兩個伺服電機以及相應的驅動組成,兩個伺服電機分別帶動兩個后輪,而后輪則采用隨動輪,這樣就帶動吸塵系統前行。后輪采用隨動輪,而不是雙輪,這樣做可以很好的加強了小車轉彎的靈活性。通過改變控制系統輸出的pwm占空比,可對兩個伺服電機實現較高精度的調速。對兩個伺服電機輸出相同頻率不同占空比,電機的轉速則不同,通過這樣差速方式,實現吸塵器的前進,后退,左轉彎,右轉彎等功能。這樣便可是使掃地機器人隨意轉彎.同時轉彎的速度可以通過單片機的程序進行調節。
1.3 感知機構
感知機構由分布在機器人兩側的光電傳感器組成。其采用光電元件作為檢測元件,一般由光源、光學通路和光電元件三部分組成,光電傳感器對機器人的位置進行探測,判斷左右轉彎是否可行。光電開關輸出與障礙物位置間的關系如下:
左光電開關:0;右光電開關:0;障礙物位置:正前。
左光電開關:0;右光電開關:1;障礙物位置:左前。
左光電開關:1;右光電開關:0;障礙物位置:右前。
左光電開關:1;右光電開關:1;障礙物位置:未碰撞。
1.4 控制系統
我們采用Atmel公司的ATmega16單片機最小系統,AVR單片機功能強大,能夠使得I/O口資源靈活,是一種處理能力極強的微控制器,同時提供許多控制系統的選擇方案。
1.5 吸塵系統
吸塵系統采用小型吸塵器,主要由吸道,吸嘴,氣泵和吸室組成。
吸塵原理:吸塵器的電機葉扇在電動機驅動下將電機中的空氣排出,這樣電機內部和外界就形成了一個氣壓差,于是外界的氣體就會源源不斷進入電機中。這樣的話,塵埃等垃圾就會被吸入吸室內,吸室中有一個過濾器,將垃圾等留在吸室中,空氣則排出吸室。
我們采用額定電壓為12V的吸塵器,單片機的工作電壓為5V,我們無法直接通過單片機控制吸塵器,這里使用一個繼電器來間接控制吸塵器。
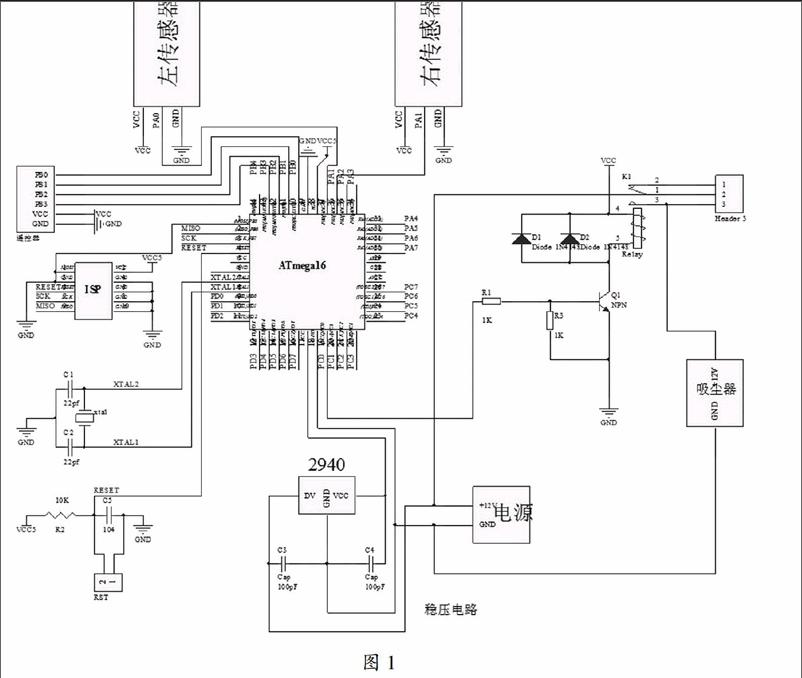
2 掃地機器人的硬件部分
硬件電路圖主要有五部分,分別為AVR單片機最小系統部分、電源及穩壓部分、感知結構部分、遙控模塊和繼電器控制電路。
完整的電路圖如圖1所示。
3 結束語
目前智能掃地機器人已經取得了很大的發展,但是還有很大的改進之處,比如傳感器還有很大的進步空間,傳感器是非常重要的一部分,只有更復雜,更精良的傳感器才能滿足人們各種復雜的需求,我們才能做出更高級的機器人。其實還可以使用更高級的技術,但是考慮到成本,我們不得不放棄選用。很多時候,因為產品依托于市場,即使市場對產品的需求量比較高,但其成本也很高時,也不見其銷量會很好,或很受歡迎,因此,產品的開發還要根據實際的市場,不能隨意做我們想做的東西,而忽略成本這個東西,而是需要多方面考慮才能進行開發。
猜你喜歡
開放教育研究(2021年3期)2021-05-25 02:41:06
小學科學(學生版)(2020年12期)2021-01-08 09:28:04
裝備制造技術(2020年4期)2020-12-25 05:26:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
能源(2018年4期)2018-05-19 01:53:44