直覺模糊Petri網的雙向模糊故障推理算法*
2017-06-15 15:14:29孫曉玲
計算機與生活 2017年6期
孫曉玲
合肥師范學院 數學與統計學院,合肥 230601
直覺模糊Petri網的雙向模糊故障推理算法*
孫曉玲+
合肥師范學院 數學與統計學院,合肥 230601
SUN Xiaoling.Bidirectional fuzzy fault reasoning algorithm of intuitionistic fuzzy Petri net.Journal of Frontiers of Computer Science and Technology,2017,11(6):1006-1013.
針對故障診斷中故障現象與故障原因之間復雜的不確定關系,利用直覺模糊集表達不確定性信息的優勢和Petri網的圖形處理問題的能力,給出了基于直覺模糊Petri網的雙向模糊故障推理算法。該算法首先利用反向直覺模糊推理算法對模型進行約減,查找故障原因,再利用正向直覺模糊推理算法對模型進行計算,輸出結果。該算法既可將故障信息化繁為簡,降低推理過程的時間復雜度,還能夠使故障診斷的確定性程度得到進一步提高。汽車發動機診斷案例表明了所給雙向直覺模糊推理算法的可行性和有效性。
直覺模糊Petri網;直覺模糊推理;故障診斷;雙向模糊故障推理
1 引言
故障診斷是通過對系統相關的一些狀態進行檢測,保證故障發生時可以檢測出與系統相關的特征信號。直覺模糊Petri網的一個重要應用就是進行故障診斷。在故障診斷中,使用的推理方法一般有正向推理和反向推理。正向推理是從事實到目標的推理,通常用于檢測信息比較完備的在線故障檢測和診斷問題。由于其推理過程是建立在整個知識庫系統之上,推理前并不清楚哪些事實和推理規則與推理目標相關,只能從大范圍的事實出發進行推理,勢必會造成冗余計算。
反向模糊推理能夠較好地解決上述的正向推理存在的問題,它是由結果到原因的推理方法,經常用于信息不太充分的離線故障診斷,其優勢在于能夠簡化不必要的推理過程。例如文獻[1]采用反向推理方法,將與問題有關的一部分產生式規則從知識庫系統中分離出來進行推理計算,不但滿足了實時性要求,還降低了冗余計算。
若能將正反向推理相結合,先進行正向推理尋找可能產生的故障,對這些可能故障采取預防措施加以防范,變“被動維修”為“主動維護”,一旦發現故障,再利用反向推理尋找故障源。若正反向推理結論相符,則說明診斷推理有效,若結論不相符,則需要不斷調整庫所和變遷的可信度、閾值或權值,直到兩者結論相符為止。例如文獻[2]提出將正反向推理相結合,并給出相應的診斷推理算法,實用性較強。
針對故障診斷中存在的不確定性信息的問題,文獻[3]通過改進的模糊Petri網算法有效地解決了故障診斷過程中不確定性知識的模糊推理,通過引入虛庫所和虛變遷概念解決了變遷是否觸發以及最后故障事件模糊值的確定問題。文獻[4]將模糊Petri網應用于高速鐵路牽引供電系統故障診斷,能夠在不確定或信息缺失的情況下,提高故障區域判斷確定性。
本文在已有模糊Petri網正反向推理算法的基礎上提出了基于直覺模糊Petri網的雙向并行推理算法。將正向推理與反向推理結合在一起,構成正反向混合推理。先根據目標征兆利用反向推理推理出有可能會產生的故障,再利用正向推理驗證故障。矩陣命令可作為正反向推理的基礎,先利用逆向推理算法壓縮矩陣的維數,再利用正向推理算法得到精簡后的推理模型目標庫所的標識值,最后通過實際推理算例驗證雙向推理算法的正確性及可行性。與已有直覺模糊推理算法相比,本文給出的正反向直覺模糊推理算法能夠減少后向推理查詢或檢查的次數,有效縮小搜索空間,避免算法中出現的冗余,在提高大型知識庫處理效率時優勢尤為明顯。
2 直覺模糊集合
模糊集合是描述不確定性知識的良好工具,而直覺模糊集合(intuitionistic fuzzy sets,IFS)增加了一個新的屬性參數——非隸屬度函數,因此比模糊集合在描述不確定性和模糊性知識方面更具實用性和靈活性。近幾年,將直覺模糊集用于知識表示和模糊推理已成為新的研究熱點[5-9]。文獻[7]提出了新的直覺模糊集的相似度和模糊熵的定義,并驗證了其有效性。文獻[7]還對Atanassov所提出的直覺模糊集理論進行了改進和擴展,從而豐富了直覺模糊集理論。其中的直覺模糊集的定義如下。
定義1(直覺模糊數)若X為論域,則論域X上的直覺模糊集為:

其中,μA(x):X→[0,1]和γA(x):X→[0,1]分別是集合A的隸屬度函數和非隸屬度函數。對集合A上的任一元素x∈X,有0≤μA(x)+γA(x)≤1。(μA(x),γA(x))稱作論域X上的直覺模糊數[7]。
根據定義1,傳統模糊集也可表示成直覺模糊集{
定義2(直覺指數)稱πA=1-μA(x)-γA(x)為論域X上直覺模糊集A中元素x的直覺指數,它反映了元素x屬于直覺模糊集A的猶豫程度或不確定程度。顯然,對任一x∈X,有0≤πA(x)≤1。若B為X中的任一傳統模糊集,則有元素x屬于模糊集B的猶豫程度為:

由此可知,模糊集是直覺模糊集的特例[6]。
定義3[7-9](直覺模糊集運算法則)若X為論域,A、B均為論域X上的直覺模糊集,則對任一x∈X,有以下運算法則:

3 直覺模糊Petri網模型及相關運算符
直覺模糊Petri網(intuitionistic fuzzy Petri nets,IFPN)中通常有起始庫所、中間庫所和目標庫所3類庫所,起始庫所表示故障征兆原因,目標庫所表示征兆,其余稱為中間庫所。故障診斷的主要任務就是根據目標庫所尋找導致目標庫所的起始庫所的過程。
根據模糊Petri網的推理特點可以分為多種推理方法,主要包括正向推理、反向推理、正反向混合推理和極大代數矩陣形式化推理。
3.1 直覺模糊Petri網模型
作為一種圖形建模和分析工具,Petri網特別適合用來研究異步、并發特征的離散事件系統,被廣泛運用于復雜系統的設計與分析中。但Petri網不能描述系統的模糊行為,因此研究者們提出了模糊Petri網的概念。
模糊Petri網是將Petri理論與模糊集合理論有機融合的新型網絡理論,它既具有Petri網的圖形描述能力,又具有模糊推理能力,是進行知識表示和推理的有力工具,尤其適合用于描述和處理模糊知識工程中的并行問題,經常被用于進行故障診斷[10-11]。但由于利用模糊Petri網進行故障診斷時,常存在故障信息表達不夠全面的問題。為了解決這個問題,直覺模糊Petri網應運而生。
直覺模糊Petri網是傳統模糊Petri網的擴展,能夠提供知識表示過程中更加豐富的信息,因此更適用于進行故障診斷。根據IFPN的定義和特點,本文所給出的直覺模糊Petri網對文獻[3-4]中的直覺模糊Petri網進行了改進,可用一個七元組來表示。
定義4(直覺模糊Petri網)直覺模糊Petri網可以表示為IFPN=(P,T,Th,W,Δ,O,M),其中:
(1)P={p1,p2,…,pn}是IFPN中庫所的集合,表示利用IFPN進行故障診斷時用到的證據和結論庫所的有限集合,n為庫所的個數。
(2)T={t1,t2,…,tm}是對應于故障診斷推理中變遷的有限集合,每個變遷對應著一個直覺模糊產生式規則,m為變遷的個數。
(3)Th={τ1,τ2,…,τn}T為變遷的閾值集合,其中τj為直覺模糊數,可表示為τj=(αj,βj)(j=1,2,…,m),(0<αj+βj≤1),αj>0為變遷tj可信度的閾值,βj≥0表示變遷tj非可信度的閾值。
(4)W=WI(p,t)?WO(t,p)是有限輸入輸出權矩陣,若p是變遷t的輸入庫所,則W=WI(p,t)={wi1,wi2,…,win}為輸入庫所p到變遷t的權重向量,wij為輸入庫所pi到變遷ti上的輸入權重,若變遷t有多個輸入庫所p1,p2,…,pn,則wi1+wi2+…+win=1。若p是變遷t的輸出庫所,則W=WO(t,p)={wo1,wo2,…,won}為變遷t到輸出庫所p上的規則可信度向量。這里μij為變遷ti到輸出庫所pj上的輸出可信度,為直覺模糊數(μwO,γwO)。μwO為變遷t可信度的隸屬度,γwO
為變遷t可信度的非隸屬度。
(5)Δ={wij}為加權輸入矩陣 (i=1,2,…,n;j= 1,2,…,m),是庫所到變遷的連接情況和每個連接弧的權系數。其中wij∈[0,1]且若庫所pi是變遷tj的輸入庫所,則wij為pi到tj輸入弧上的權系數。若庫所pi不是變遷tj的輸入庫所,則wij等于0。
(6)O={aij}為輸出矩陣(i=1,2,…,n;j=1,2,…,m),反映了變遷到庫所的連接情況及每個輸出連接的可信度。若庫所pj是變遷ti的輸出庫所,則aij等于變遷ti的可信度cj,其中cj為直覺模糊數,可表示為為變遷tj可信度的隸屬度為變遷tj可信度的非隸屬度。若庫所pj不是變遷ti的輸出庫所,則aij等于0。
(7)M={M(pi)}(i=1,2,…,n)是庫所集合上的標識向量,表示庫所的可信度,可記作M=[M(p1),M(p2),…,M(pn)]T,其中M(pi)為直覺模糊數(μi,γi)。μi為庫所pi可信度的隸屬度,γi為庫所pi可信度的非隸屬度。關于直覺模糊產生式規則的3種類型表述以及基于直覺模糊Petri網的知識表示方法請參考文獻[12-13]。
3.2 幾個矩陣運算符
本文將給出可用于故障診斷的直覺模糊推理算法。該算法可將直覺模糊診斷推理的過程轉化為矩陣運算的過程。在給出該診斷推理算法之前定義如下幾個矩陣運算關系[7-9]。
定義5(矩陣運算關系)
(1)加法算子⊕:A⊕B=C?max(aij,bij)=cij,其中A、B、C均為n×m維直覺模糊矩陣;
由于矩陣A、B和C的元素均為直覺模糊數,矩陣需根據直覺模糊邏輯進行運算。

4 直覺模糊Petri網故障診斷推理算法
正向推理與反向推理是兩種比較常用的推理方法,正向推理的優點是具有并行推理能力,并能夠在推理結束后得到全部的值,其主要不足是推理具有盲目性。反向推理的優點是算法較簡單,準確性較高,并且可以較大程度地避免冗余計算,主要不足是在選擇初始目標時具有盲目性。根據這些情況,本文將正向推理與反向推理結合在一起,構成正反向混合推理。先根據目標征兆利用反向推理推理出有可能會產生的故障,再利用正向推理驗證故障[14-16]。
4.1 IFPN故障診斷反向推理算法
該算法分為兩個階段:第一階段包括步驟1到步驟5,這一階段是獲取FPN模型的目標庫所的過程。第二階段包括步驟6到步驟8[17-18],這一階段是不斷調整庫所的真實度,以確定引發目標庫所所表示的事實的原因。
步驟1建立模糊Petri網模型,并根據目標庫所給出初始標識M0。
步驟2寫出輸入矩陣I,輸出矩陣O,并計算VI、VO和V,其中V根據以下公式計算:

這里,有:
(1)?vi∈V,若vi=1,則相應的庫所pi為中間庫所
(2)?vi∈V,若vi=0,則相應的庫所pi為初始庫所或是終止庫所
其中V、VI和VO為n維向量;aij(i=1,2,…,m;j=1,2,…,n)為矩陣I的元素;bij(i=1,2,…,m;j= 1,2,…,n)為矩陣O的元素;|?·?|表示元素的模糊值。
步驟3對第k步迭代,變遷和標識值向量可根據以下公式計算:

步驟4人工智能轉換可根據以下情況進行:
問:Mk′中的哪個非零元素對應的命題可以充分轉換?
答:pi可以,令向量Mk′中的第i個元素為0,即若向量Mkp不是零向量,則意味著Mk′中有中間庫所,不能被充分轉化,于是k=k+1,返回步驟3,否則轉到步驟5。
步驟5
步驟6構造關聯矩陣Ig和Og,在I和O中,刪除與M中的零元素相關的庫所對應的行。類似的,刪除與T中零元素相關的庫所對應的列,從而得到新的關聯矩陣Ig和Og。
步驟7構造FPN模型的目標庫所集。通過Ig和Og,FPN模型的目標庫所集可根據初始FPN模型構造出來。由于一部分庫所和變遷以及相應的連接弧已經被刪除,初始FPN模型可能被分成幾個FPN子模型,FPN子模型數量應小于等于目標庫所的數量。
步驟8通過構建FPN模型,可計算出激發變遷的初始庫所真實度,找到引發目標庫所所表示的事實的原因。
算法分析:該算法的步驟3中Mk′的主要目的是為了減少后向推理查詢或檢查的次數,步驟4的主要目的是對結果庫所的真實度已知的變遷的多個前件進行推理。
4.2 IFPN故障診斷正向推理算法
步驟1輸入:加權輸入向量ΔT={wij},表示輸入庫所到變遷的權重向量。wij等于pi到tj輸入弧上的權系數。輸出矩陣On×m={μij},表示變遷到輸出庫所的規則可信度矩陣。μij為變遷ti到輸出庫所pj上的輸出可信度。
庫所初始標識向量為:

定義在變遷集合T上的閾值向量為:

初始化各輸入矩陣,令k=0,初始化向量值Mk=M0,其中Mk為第k次迭代的標識值。
步驟2計算各變遷輸入庫所可信度的直覺模糊值E0=ΔT·M0,其中Δ為輸入的權重向量。
步驟3令G=E0⊙Th,將步驟2中計算出的直覺模糊值與閾值進行比較,判斷各變遷能否激發,可知G應是(0,1)或(1,0)的m維直覺模糊列向量。
步驟4令H=E0?G,計算能成功激發的變遷的前件模糊值,其中H是m維直覺模糊向量。
步驟5激發滿足激發條件的故障變遷并計算激發后輸出庫所的新模糊值M1=Γ?H。
步驟6將新模糊值與原模糊值進行比較M1=M0⊕M1。
步驟7若M1≠M0,則令k=k+1,返回步驟1,若M1=M0,則推理結束,輸出結果為M1。
5 診斷實例
現以汽車發動機故障為例來進行診斷建模分析。根據以下發動機故障圖,建立發動機的故障診斷模型。
(1)庫所集

(2)命題集

(3)規則集

由反向推理算法可知:
初始標識M0=(0?0?1?0?0?0?0?0?0?0?1?0?0?0)T,輸入和輸出矩陣分別為:

進行第一次迭代,k=1:

令p9為0,得到:

由于M1q不為零向量,則k=2:

由于M2q=M2′是零向量,則:

現根據以上算法計算簡化后的推理結果,由正向推理算法可知:
首先令輸入權矩陣為W。

初始標識為:

閾值向量為:

計算步驟:
(1)k=0,令Mk=M0(k為迭代次數)。
(2)δ=WT·M0=
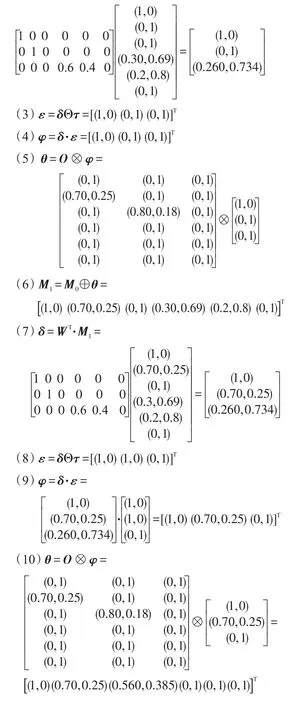

M3=M2,與p11相比,p3發生故障的可能性最大,引起故障的最大原因為p1。
算例分析:本文給出的直覺模糊雙向推理算法考慮了變遷閾值、輸入權值以及規則可信度等多種約束條件,并定義了狀態轉移函數檢測變遷狀態的變化情況。這樣就可以將已經激發而其狀態轉移函數值沒有增大的變遷剔除,以避免變遷的重復激發以及可能出現的循環問題,使得推理過程更加高效。
另外直覺模糊雙向推理算法在推理過程中只考慮與目標庫所相關的庫所及變遷,避免無關的路徑推理,因此能夠避免冗余,簡化不必要的推理過程。算法在推理過程中是并行的,因此直覺模糊推理的步數只與直覺模糊推理的最大深度有關。上面例子中的最大直覺模糊推理深度為2,因此只需要兩步即能得到最終的推理結果。該算法若能將現場實測數據與專家經驗數據相結合,則可以使診斷結果更加符合實際情況。
6 結論
本文提出了基于直覺模糊Petri網的雙向模糊故障推理算法。本文算法充分利用了模糊Petri網的并行處理能力,利用直覺模糊反向推理算法對模型進行約減,再利用正向直覺模糊推理算法對模型進行計算,不僅將故障信息化繁為簡,降低了推理過程的時間復雜度,還能夠達到使故障診斷的確定性程度得到進一步提高的目的。算法還提供了引起故障的原因隸屬度、非隸屬度等更豐富的故障信息,具有一定的實際意義和應用價值。
[1]Wang Huiying,Yue Xiaobo,Zhou Kaiqing.A bi-directional parallel reasoning algorithm based on fuzzy petri nets[J]. Computer Engineering,2014,40(3):208-212.
[2]Huang Min,Lin Xiao,Hou Zhiwen.Modeling method of fuzzy fault Petri nets and its application[J].Journal of Central South University:Science and Technology,2012,44 (1):208-215.
[3]Yu Ping,Cao Jiping,Song Jianshe,et al.Improved fuzzy Petri net algorithm and its application in fault diagnosis[J]. Ordnance IndustryAutomation,2011,30(6):20-22.
[4]Wu Shuang,He Zhengyou,Qian Chenghao,et al.Application of fuzzy Petri net in fault diagnosis of traction power supply system for high-speed railway[J].Power System Technology,2011,35(9):79-85.
[5]Szmidt E,Kacprzyk J.Correlation of intuitionistic fuzzy sets[C]//LNCS 6178:Proceedings of the 13th International Conference on Information Processing and Management of Uncertainty,Dortmund,Germany,Jun 28-Jul 2,2010.Berlin,Heidelberg:Springer,2010:169-177.
[6]Wei Guiwu.Gray relational analysis method for intuitionistic fuzzy multiple attribute decision making[J].Expert Systems withApplications,2011,38(9):11671-11677.
[7]Park J H,Hwang J H,Park W J,et al.Similarity measure on intuitionistic fuzzy sets[J].Journal of Central South University,2013,20(8):2233-2238.
[8]Xu Zeshui,Cai Xiaoqiang.Recent advances in intuitionistic fuzzy information aggregation[J].Fuzzy Optimization and Decision Making,2010,9(4):359-381.
[9]Yager R R.Level sets and the representation theorem for intuitionistic fuzzy sets[J].Soft Computing,2010,14(1):1-7.
[10]Hu Hesuan,Li Zhiwu,Al-Ahmari A.Reversed fuzzy Petri nets and their application for fault diagnosis[J].Computers &Industrial Engineering,2011,60(4):505-510.
[11]Liu Huchen,Lin Qinglian,Ren Minglun.Fault diagnosis and cause analysis using fuzzy evidential reasoning approach and dynamic adaptive fuzzy Petri nets[J].Computersand Industrial Engineering,2013,66(4):899-908.
[12]Sun Xiaoling,Wang Ning.Fault diagnosis based on intuitionistic fuzzy Petri nets[J].Computer Engineering and Science,2014,36(9):1736-1741.
[13]Sun Xiaoling,Wang Ning.Weighted intuitionistic fuzzy reasoning based on intuitionistic fuzzy Petri nets[J].Computer Engineering andApplications,2013,49(4):50-53.
[14]Zhou Chuangming,Shen Xiaoyong,Lei Yingjie.Research of FOE intention recognition method based on intuitionistic fuzzy Petri net[J].Journal of Computer Applications,2009, 29(9):2464-2467.
[15]Xiang Yongsheng,Liu Wu,Yue Xiaobo,et al.Research on the auto fault diagnosis simulation based on fuzzy petri nets [J].Computer Engineering and Science,2009,31(3):86-89.
[16]Lei Yingjie,Wang Baoshu,Lu Yanli.Approximate reasoning method based on intuitionistic fuzzy logic[J].Control and Decision,2006,21(3):305-310.
[17]Sun Xiaoling,Wang Ning,Liang Yan.Fuzzy reasoning by using marked fuzzy Petri nets[J].Computer Engineering and Science,2012,34(3):152-157.
[18]Sun Xiaoling,Wang Ning.Method of knowledge representation based on marked fuzzy Petri net[J].Computer Engineering andApplications,2010,46(6):48-51.
附中文參考文獻:
[1]王惠英,樂曉波,周愷卿.一種基于模糊Petri網的雙向并行推理算法[J].計算機工程,2014,40(3):208-212.
[2]黃敏,林嘯,侯志文.模糊故障Petri網建模方法及其應用[J].中南大學學報:自然科學版,2012,44(1):208-215.
[3]喻平,曹繼平,宋建社,等.改進的模糊Petri網算法及其在故障診斷中的應用[J].兵工自動化,2011,30(6):20-22.
[4]吳雙,何正友,錢澄浩,等.模糊Petri網在高速鐵路牽引供電系統故障診斷中的應用[J].電網技術,2011,35(9):79-85.
[12]孫曉玲,王寧.基于直覺模糊Petri網的故障診斷[J].計算機工程與科學,2014,36(9):1736-1741.
[13]孫曉玲,王寧.基于直覺模糊Petri網的加權直覺模糊推理[J].計算機工程與應用,2013,49(4):50-53.
[14]周創明,申曉勇,雷英杰.基于直覺模糊Petri網的敵意圖識別方法研究[J].計算機應用,2009,29(9):2464-2467.
[15]向永生,劉武,樂曉波,等.基于模糊Petri網的汽車故障診斷仿真研究[J].計算機工程與科學,2009,31(3):86-89.
[16]雷英杰,王寶樹,路艷麗.基于直覺模糊邏輯的近似推理方法[J].控制與決策,2006,21(3):305-310.
[17]孫曉玲,王寧,梁艷.應用帶標識的模糊Petri網的模糊推理[J].計算機工程與科學,2012,34(3):152-157.
[18]孫曉玲,王寧.應用帶標識的模糊Petri網的知識表示方法[J].計算機工程與應用,2010,46(6):48-51.

孫曉玲(1977—),女,安徽合肥人,2006年于河北大學獲得碩士學位,現為合肥師范學院副教授,主要研究領域為不確定性模糊推理,模糊Petri網等。現主持安徽省高校省級自然科學重點項目。
Bidirectional Fuzzy Fault ReasoningAlgorithm of Intuitionistic Fuzzy Petri Net*
SUN Xiaoling+
School of Mathematics and Statistics,Hefei Normal University,Hefei 230601,China
+Corresponding author:E-mail:sxl_hftc@126.com
According to the complicated uncertain relation between fault phenomenon and fault reason in fault diagnosis,using the advantage of intuitionistic fuzzy sets in expressing uncertainty information and the ability of graphics processing of Petri net,this paper presents a bidirectional fuzzy fault diagnosis inference algorithm based on intuitionistic fuzzy Petri nets.The reverse intuitionistic fuzzy reasoning algorithm is firstly applied to the model reduction in order to find the cause of the fault.The positive intuitionistic fuzzy reasoning algorithm is used to calculate the model and then output the results.The algorithm can not only simplify the fault information and reduce the time complexity of the inference process,but also can improve the fault diagnosis degree of certainty.Automobile engine diagnosis shows that the bidirectional intuitionistic fuzzy reasoning algorithm is feasible and effective.
intuitionistic fuzzy Petri nets;intuitionistic fuzzy reasoning;fault diagnosis;bidirectional fuzzy fault reasoning
ing was born in 1977.She
the M.S.degree from Hebei University in 2006.Now she is an associate professor at Hefei Normal University.Her research interests include uncertainty fuzzy reasoning and fuzzy Petri nets,etc.
A
TP182
*The Key Natural Science Research Project of Anhui Province under Grant No.KJ2016A580(安徽省高等學校省級自然科學研究重點項目).
Received 2016-03,Accepted 2016-06.
CNKI網絡優先出版:2016-06-02,http://www.cnki.net/kcms/detail/11.5602.TP.20160602.1144.006.html
猜你喜歡
裝備制造技術(2020年3期)2020-12-25 05:22:30
汽車維修與保養(2019年7期)2020-01-06 03:30:42
北京航空航天大學學報(2016年6期)2016-11-16 01:50:43
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
