面向電網巡檢的多旋翼無人機航測系統關鍵技術研究及應用
2017-06-19 18:47:09宮煦利
測繪通報 2017年5期
湯 堅,楊 驥,宮煦利
(1. 中國能源建設集團廣東省電力設計研究院有限公司,廣東 廣州 510663; 2. 廣州地理研究所,廣東 廣州 510070)
面向電網巡檢的多旋翼無人機航測系統關鍵技術研究及應用
湯 堅1,楊 驥2,宮煦利1
(1. 中國能源建設集團廣東省電力設計研究院有限公司,廣東 廣州 510663; 2. 廣州地理研究所,廣東 廣州 510070)
針對無人機電力巡檢所面臨的定位精度低、近距離巡檢操控難度大、自動化程度低、人為操控事故風險高等問題,本文提出了利用多旋翼無人機RTK差分定位技術、復雜塔型飛行規則機器學習算法等無人機航測系統技術,研發面向電網巡檢的無人機智能操作系統及控制終端,提升電網線路日常管理和應急指揮的規范性、便利性和經濟性,為電網管理部門提供一種低成本、易操作、高效率、機動靈活的新型巡檢模式。
電網巡檢;RTK差分定位;機器學習算法;無人機智能操作系統
傳統的電網巡檢勞動強度大、條件艱苦,因此,電網管理部門急需一種成本低、自動化程度高、機動靈活的新型巡檢方式。無人機系統具有機動、快速、經濟等優勢,現已逐步從研究開發發展到實際應用階段。本文研究可實現高效電網巡檢,快速發現輸電線路運維過程中的缺陷和隱患,增強電網穩定性;同時,可作為電網應急聯動系統的重要組成部分,為應急搶險提供及時的輔助決策,有效保障電網安全生產。
1 研究現狀
無人機電力巡檢在近年來得到快速發展,但依然面臨以下主要問題:
(1) 定位精度低,在巡檢過程中難免會受到樹木、建筑物等障礙物的影響,以及導線產生的電磁干擾。
(2) 傳統電力巡檢對于桿塔本體的巡視,為了獲取清晰的圖像,對銷釘級缺陷進行判別,近距離巡檢操控難度極大。
(3) 自動化程度低,電力巡檢人員通常采用人工操控無人機進行巡檢,人為操作事故的風險高。
因此,本文對多旋翼無人機RTK差分定位技術、復雜塔型飛行規則機器學習算法,以及無人機智能操作系統等航測系統關鍵技術進行研究,將大幅提升電網無人機巡檢的工作效率,降低風險,同時提高電網巡檢管理水平,實現電網巡檢管理的數字化與規范化。
2 多旋翼無人機航測系統關鍵技術研究
2.1 多旋翼無人機RTK差分定位技術研究
傳統的多旋翼無人機采用衛星導航系統定位,當對輸電線路進行近距離巡視時,易受電磁干擾而產生碰撞事故,給無人機電網巡視作業帶來了安全隱患。多旋翼無人機RTK(realtime kinematic)載波相位差分技術,是實時處理基站和機載接收機載波相位觀測量的差分方法,它將基站采集的載波相位發送給機載接收機,進行求差解算坐標,實時獲取厘米級定位精度的結果(如圖1所示)。

圖1 多旋翼無人機RTK差分定位原理
多旋翼無人機結合RTK差分定位技術、長焦高分辨率可見光相機和紅外相機,實現強電磁干擾情況下的電力巡視高精度定位和高清圖像獲取。通過無人機智能操控終端,自動化完成桿塔本體精細化巡視和通道巡視(如圖2所示),從而實現無人機電網巡視的智能化作業,有效提升電網巡檢效率,減少人為操作事故,增強電網穩定性。

圖2 桿塔本體精細化巡視與通道巡視方法
2.2 多旋翼無人機復雜塔型飛行規則機器學習算法
目前,110 kV以上電壓等級的輸電線路已存在上百種不同的塔型,線路走廊通道的地理環境差異也比較大。因此,利用無人機進行電網巡視時,需要根據架空線路的不同工況和塔型的差異,采用不同的巡視規則和作業方法。為了保證巡視作業能夠適應和兼容這些差異,本文針對典型塔型和地理環境研究無人機電網巡視理論模型與巡視策略,提出了多旋翼無人機復雜塔型飛行規則機器學習算法,確保了無人機自動化巡視作業的安全和效率。復雜塔型飛行規則的機器學習和斷點續飛算法主要涉及自動分類和回歸技術研究。
2.2.1 機器學習自動分類算法
機器學習分類算法,是根據樣本的特征或屬性,將其劃分到已有的類別中,即根據其他屬性的值或數據中潛在聯系的模式(相關性、趨勢、聚類和異常),預測特定屬性的值,從而進行分類。常用的分類算法有邏輯回歸、支持向量機、隨機森林、樸素貝葉斯(NLP中常用)、深度神經網絡(視頻、圖片、語音等多媒體數據中使用)等。
在當前業界的機器學習方法中,邏輯回歸算法是最為常用的,它用于估算某種事物的可能性。假設樣本是{x,y},x是m維樣本特征向量,y是0或1,表示是否屬于某塔型,那么這個樣本塔x屬于某塔型(即y=1)的概率可以通過下面的邏輯函數來表示
(1)
式中,x為包含塔的高度、尺寸等屬性的特征向量;θ為對應x的模型參數(回歸系數);σ是sigmoid函數。
利用無人機進行電網巡視時,首先創建模型,包括特征選擇(塔型屬性)、數據類型、屬性類型與屬性轉換(樣本屬性分析),然后選擇分類算法進行精確預測,從而完成塔型分類。
2.2.2 斷點續飛回歸算法
斷點續飛回歸算法是利用數據統計學原理,對大量統計數據進行數學處理,確定因變量與某些自變量的相關關系,建立一個相關性較好的回歸方程(函數表達式),并加以外推,用于預測今后因變量變化的分析方法。回歸技術通常用于預測分析,時間序列模型及發現變量之間的因果關系,主要算法有線性回歸、普通最小二乘回歸(ordinary least squares regression)、逐步回歸(stepwise regression)、多元自適應回歸樣條(multivariate adaptive regression splines)等。
無人機在執行電網巡視航飛任務時,若因突發狀況而導致航飛中斷,可采用回歸算法,從無人機的航飛位置變量推算出返航位置并繼續執行航飛任務。以線性回歸算法為例,根據無人機的航飛軌跡、中斷位置等自變量x和返航位置因變量Y的相關關系,建立如下式x與Y的線性回歸方程式,從而實現無人機的斷點續飛功能,有效提升電網巡視的效率。
(2)
式中,Xt為無人機航飛位置的t類自變量;Yt為無人機返航位置的因變量;a、b1、b2、…、bn為線性回歸方程式的參數。
2.3 無人機智能操作系統及控制終端研制
無人機智能操作系統是基于大疆SDK,針對電力巡檢作業特點深度定制的無人機操作系統。為了能夠大范圍地查看電網周圍環境,智能操作系統可以自動規劃航線,全自動地完成輸變電線路的精細化巡視和通道巡視作業,獲取走廊通道范圍內的正射影像、空中360°全景和傾斜攝影三維建模影像數據(如圖3所示)。通過對無人機的智能操控,可以清楚、準確地發現桿塔本體和通道環境的缺陷和隱患,使無人機電網巡檢作業更加安全可靠。

圖3 無人機智能操作系統功能
桿塔精細化巡檢模塊分為學習模式和巡檢模式。學習模式可以按照不同塔型記錄和存儲無人機的飛行軌跡和拍攝位置。所記錄的飛行信息將作為飛行依據在自動化巡檢模式中使用,實現無人機的自動精細化巡檢,極大地降低了對巡視作業人員的無人機操控素質的要求,提升了桿塔巡檢的效率,保證了電網巡視作業的安全(如圖4所示)。

圖4 精細化巡檢主界面
在通道巡檢模塊中,無人機智能操作系統可以自動控制無人機快速獲取施工黑點、滑坡、山火及樹障等影像數據。無人機可以沿著通道進行視頻拍攝和定時拍照(如圖5所示),清晰地記錄輸電線路走廊通道范圍內的環境情況,為巡視人員進行通道隱患排查提供數據支撐。

圖5 通道巡檢主界面
控制終端基于Android系統進行定制開發,32GB以上存儲,6.8寸以上屏幕,高清分辨率,4G模式雙卡雙待,滿足IP67以上的防護等級要求,能夠通過內置嵌入的智能操作系統控制無人機實現自動化電力巡視。
3 試驗介紹
3.1 試驗區域
2017年1月,筆者所在單位采用多旋翼無人機對廣東電網某供電局所管轄的110kV某線路#1—#35進行精細化巡視,該線路90%以上桿塔處于山地或高山峻嶺區域,全長約7.8km,精細化巡視作業難度大。
3.2 試驗設備
本試驗采用大疆Matrice600Pro多旋翼無人機搭載ZenmuseX5S云臺相機,執行精細化巡視作業。該無人機最大的特點是搭載了大疆A3Pro飛控系統,配備3套IMU和GNSS模塊,提升了無人機巡視時的定位控制精度,保障了穩定飛行。
3.3 成果分析
本次多旋翼無人機自動精細化巡視試驗發現桿塔本體重大缺陷34處(如圖6所示)。相比傳統的人工巡檢方式,無人機巡檢具有表1所示的特征。實踐表明,結合RTK差分定位技術和復雜塔型飛行規則機器學習算法,多旋翼無人機巡檢可以實現電力巡視高精度定位和高分辨率影像獲取。通過自主研制的無人機智能控制終端自動化完成精細化巡視作業,快捷、安全、高效,從而實現電網精細化運維的規范化。

圖6 精細化巡視試驗結果
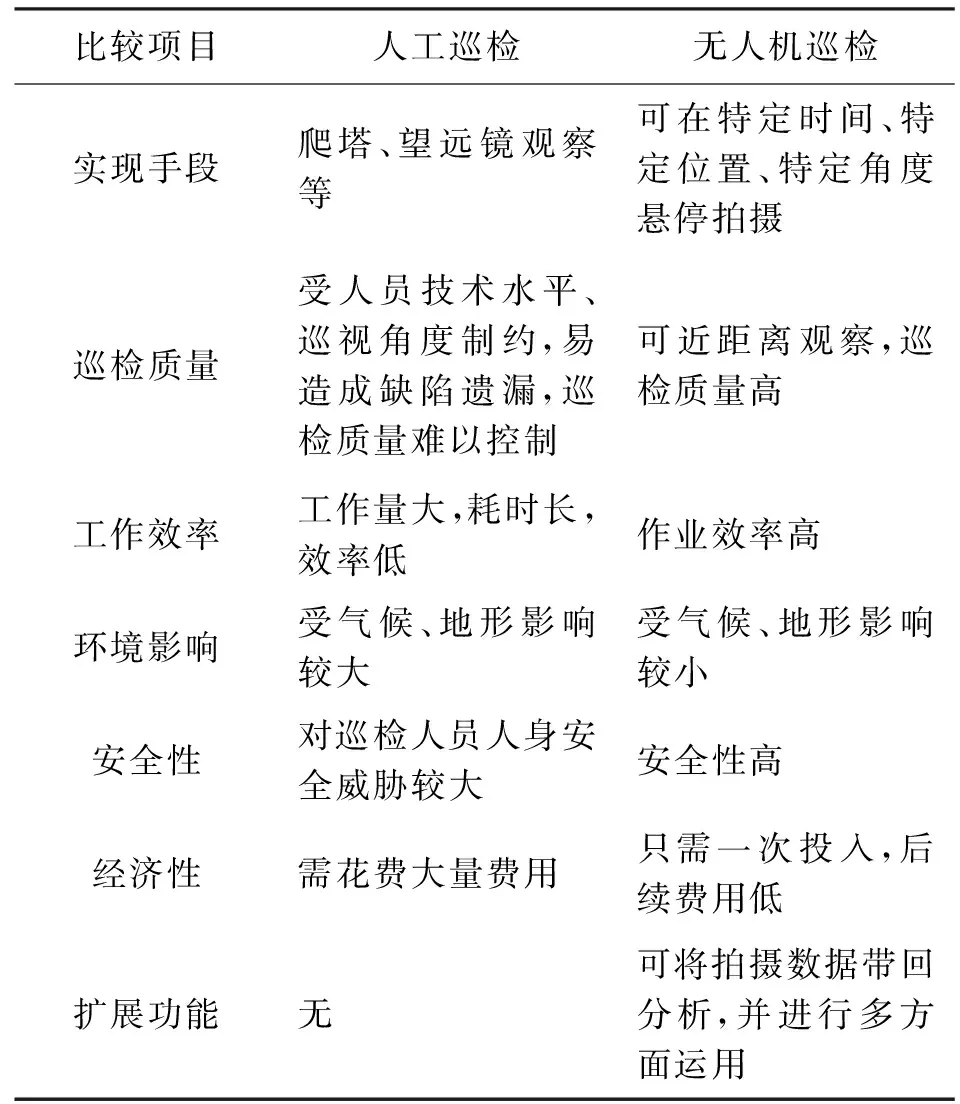
比較項目人工巡檢無人機巡檢實現手段爬塔、望遠鏡觀察等可在特定時間、特定位置、特定角度懸停拍攝巡檢質量受人員技術水平、巡視角度制約,易造成缺陷遺漏,巡檢質量難以控制可近距離觀察,巡檢質量高工作效率工作量大,耗時長,效率低作業效率高環境影響受氣候、地形影響較大受氣候、地形影響較小安全性對巡檢人員人身安全威脅較大安全性高經濟性需花費大量費用只需一次投入,后續費用低擴展功能無可將拍攝數據帶回分析,并進行多方面運用
4 結 語
本文突破了多旋翼無人機RTK差分定位技術、復雜塔型飛行規則機器學習算法等無人機航測系統關鍵技術, 研發了面向電網巡檢的無人機智能操作
系統和控制終端,實現了輸電線路桿塔本體和走廊通道的自動化巡視,為電網管理部門提供一種低成本、易操作、高效率、機動靈活的新型巡檢方式。試驗表明,本文研究成果可指導電網企業進行合理的設施巡檢維護,降低電網故障停電損失,提升電網供電可靠性,為日常安全供電、企業生產和人民生活提供重要安全保障。
[1] 付昱瑋,李字明,姜洪.無人機巡線的發展和應用研究[J].黑龍江科技信息,2014(3):25-27.
[2] 鄭武略,張富春,焦炯,等.多旋翼無人機在輸電線路巡檢中的應用[J].中國電業(技術版),2016(4):70-73.
[3] 謝建春,孫丙玉,李文清,等.一種低空無人機航攝系統關鍵技術的試驗研究[J].測繪通報,2015(10):85-87,125.
[4] 畢凱,李英成,丁曉波,等.輕小型無人機航攝技術現狀及發展趨勢[J].測繪通報,2015(3):27-31,48.
[5] 李力,徐勛建,李波,等.架空線路無人機巡線技術探討[J].湖南電力,2012,32(1):44-47.
[6] 買小爭,楊波,馮曉敏. 無人機航攝像控點布設方法探討[J]. 測繪通報,2012(S1):268-271.
[7] 湯明文,戴禮豪,林朝輝,等.無人機在電力線路巡視中的應用[J].中國電力,2013,46(3):35-38.
[8] 尹杰,楊魁. 基于無人機低空遙感系統的快速處理技術研究[J]. 測繪通報,2011(12):15-17.
[9] 彭向陽, 劉正軍, 麥曉明,等.無人機電力線路安全巡檢系統及關鍵技術[J].遙感信息, 2015(1):51-57.
[10] 廖永生,陳文森. 無人機低空數字攝影測量參數計算和路線設計系統[J]. 測繪通報,2011(9):38-41.
[11] 譚雪敏,吳遠峰,袁正午,等.拉格朗日多項式邏輯回歸分類算法并行計算優化[J].遙感信息,2016(1):96-101.
[12] 毛林,陸全華,程濤.基于高維數據的集成邏輯回歸分類算法的研究與應用[J].科技通報,2013(12):64-66.
[13] 孫德山,趙君,高釆葵,等.基于一類分類的線性規劃支持向量回歸算法[J].計算機科學,2014,41(4):230-232,243.
[14] 曹鳳海,宋占武,李燕,等.無人機航攝拍照瞬間精確空間位置的確定[J].測繪通報,2016(6):144-145.
[15] 崔紅霞,林宗堅,孫杰. 無人機遙感監測系統研究[J]. 測繪通報,2005(5):11-14.
Multi-rotor UAV Aerial Survey Technology for Power Grid Inspection:Research and Application
TANG Jian1,YANG Ji2,GONG Xuli1
(1. China Energy Engineering Group Guangdong Electric Power Design Institute Co. Ltd., Guangzhou 510663, China;2. Guangzhou Institute of Geography, Guangzhou 510070, China)
To solve the problems of low positioning precision, difficult control in close inspection, low automation, high risk of man-made control of UAVs power inspection, this paper proposed a multi-rotor UAV RTK differential positioning technology, and machine learning algorithm of UAV Aerial Survey flight rules planning in complex electric tower inspection. Based on this research, it developed a UAV intelligent operating system and control terminals which greatly improved the quality of the normative daily management and emergency command of power network with high convenience and efficiency. The system could provide the low costs, easy operation, high efficiency and mobility new power inspection mode for the power grid management department.
power grid inspection; RTK differential positioning; machine learning algorithm; UAV intelligent operation system
湯堅,楊驥,宮煦利.面向電網巡檢的多旋翼無人機航測系統關鍵技術研究及應用[J].測繪通報,2017(5):67-70.
10.13474/j.cnki.11-2246.2017.0156.
2017-03-28
2017年廣州市產學研協同創新重大專項;2015年廣東省水利科技創新項目
湯 堅(1981—),男,高級工程師,主要從事無人機電網巡檢服務工作。E-mail: fishman1831@126.com
P208
A
0494-0911(2017)05-0067-04
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
故事大王(2016年7期)2016-09-22 17:30:08