基于μCOS嵌入式系統控制的激光打標機設計
2017-06-20 00:29:27韓竺秦陳少煌陳偉鋒黃爽周展鑫蔡
軟件導刊 2017年4期
關鍵詞:嵌入式
韓竺秦+陳少煌+陳偉鋒+黃爽+周展鑫+蔡佳玲

摘要:隨著激光技術和計算機控制技術的不斷發展,激光打標機憑其無接觸、無切割力、速度快等優點逐漸代替傳統的打標技術,得到廣泛應用,能滿足用戶對產品精度及美觀的需求。設計利用PC上位機解讀圖像,通過串口與下位機Cortex-M4 K60通訊,控制XY軸的步進電機以及LD-E405G68激光頭的運動軌跡進行打標。綜合了激光技術、嵌入式和計算機控制技術,激光打標能在多種物體表面上,刻出字符、圖案,精度可以在微米量級內調整。該系統可以實現實時、高精度的激光標記。
關鍵詞:激光打標機; K60;計算機控制技術;嵌入式
中圖分類號:TP319
文獻標識碼:A
文章編號:16727800(2017)004012403
0引言
隨著科學技術和激光加工技術的發展,激光加工技術已經在人們生活中得到廣泛應用。我國激光技術起步晚,傳統的噴碼技術是標識技術的一種,相比機械壓痕、印刷、化學腐蝕等標識技術,噴碼技術具有不接觸產品,表示內容豐富,可以和計算機技術結合進行復雜內容噴印等優點[2]。噴碼技術已被廣泛應用于日化產品、食品、建材產品、電子產品等行業。在國內外,噴碼技術應用一直保持著較高增長率,并且具有非常好的發展前景。隨著噴碼技術的改進與新的噴碼技術不斷出現,噴碼機的種類在不斷增加,性能也在逐漸提高。按照所用耗材的不同,噴碼機可分為油墨噴碼機和非油墨噴碼機,即激光打標機[1]。
1控制系統設計
1.1工作原理
通過JAVA上位機解碼BMP圖像,獲取對應點的坐標以及其灰度值等信息并發送給單片機,X軸步進電機帶動激光頭運動,X軸每走一步對每個點進行灼燒打標,直到行打標完畢X軸步進電機帶動激光頭返回行原點,然后Y軸前進一步;循環下去一直到圖像數據結束。
1.2系統框圖設計
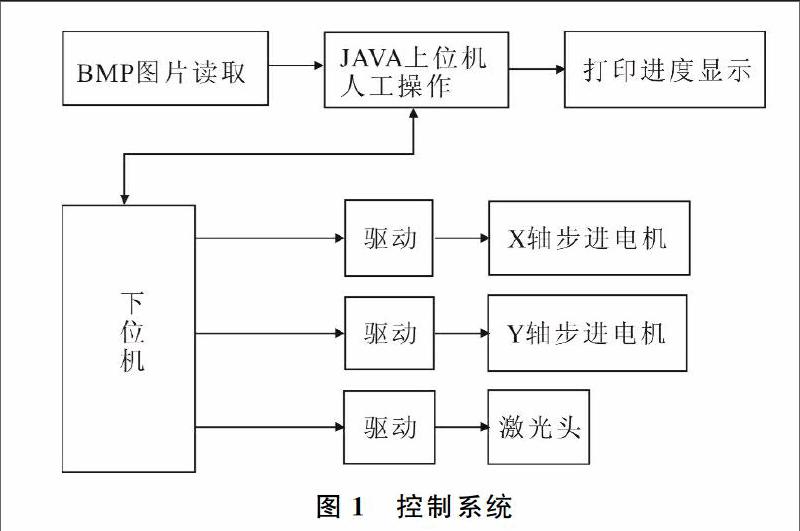
通過對現有激光打標機開發的調研,針對本項目嵌入式控制系統特點,所設計的控制系統應具備如下條件:(1)人機界面交互。利用Java開發的上位機,實現數據解碼,控制打標的各種功能。(2)高精度步進電機及XY兩軸運動支架。提供XY兩軸機械運動基礎。(3)上、下位機通訊。利用串口通訊,實現數據傳輸。(4)處理器頻率達到100M以上,Flash存儲512K以上,用作圖片數據緩存。基于以上條件,設計出以XY兩軸運動的掃描式激光打標控制系統工作原理,如圖1所示。
2硬件系統設計
系統硬件選擇主要包括處理器及外圍擴展接口。硬件平臺包括控制芯片、電路元件、步進電機、激光頭等。激光頭選型在本設計中尤其重要,選擇合適的硬件可以簡化電路從而簡化電路原理圖,并且在實行控制方面能簡化程序,特別是復雜的步進電機控制時序。
2.1控制芯片
飛思卡爾Cortex-M4 K60是一款32位ARM芯片,512KB的Program flash,128KB的SRAM適合打標圖票數據緩存,100M穩定高速運行頻率,適合嵌入式系統穩定運行。內置多個串口接口,適合應用多種上下位機數據傳輸與調試。Cortex-M4 K60結合IAR開發環境,實現方便、快速開發。綜合需求,選擇MK60DN512ZVLQ10芯片。
2.2步進電機驅動模塊
A4988是一款帶轉換器和過流保護的 DMOS 微步驅動器,該產品可在全、半、1/4、1/8 及 1/16 步進模式時操作雙極步進電動機,輸出驅動性能可達35V±2,A4988 包括一個固定關斷時間電流穩壓器,該穩壓器可在慢或混合衰減模式下工作。 轉換器是 A4988 易于實施的關鍵。只要在“步進”輸入中輸入一個脈沖,即可驅動電動機產生微步。無需進行相位順序表、高頻率控制行或復雜的界面編程。A4988 界面非常適合復雜的微處理器不可用或過載的應用。
2.3激光頭驅動: L298N
L298N是ST公司生產的一種高電壓、大電流電機驅動芯片。主要特點是:工作電壓高,最高工作電壓可達46V;輸出電流大,瞬間峰值電流可達3A,持續工作電流為2A。本設計采用L298N模塊,該模塊除了驅動能力之外,本身集成了5V穩壓功能。在設計中,只要以12V電源輸入,在驅動激光頭的同時以穩壓5V電壓給控制電路供電。
2.4硬件電路設計
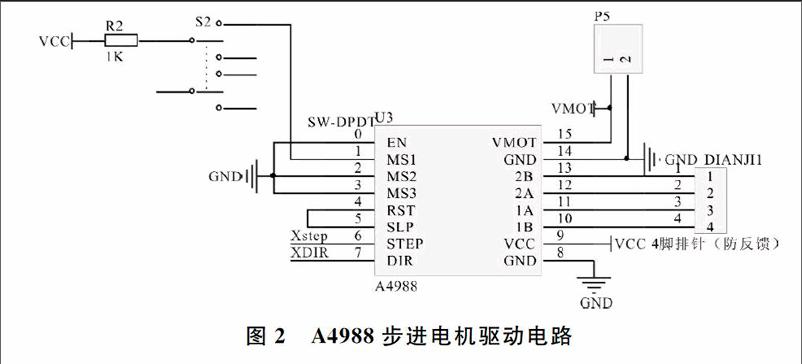
本設計的硬件部分可以分為4個模塊:控制器、驅動、步進電機、激光頭。 控制器K60芯片只要提供供電路便能完成工作。本文只介紹A4988步進電機驅動電路,如圖2所示。 根據A4988步進電機驅動模塊說明書,MS1、MS2 、MS3組合控制步進電機步距角。MS2、MS3接低電平,MS1接開關。當MS1清位,MS1 、MS2、MS3為000,步距角為1.8°;當MS1置位,MS1 、MS2、MS3為100,步距角為0.9°。兩種步距腳的精度利用開關選擇,滿足設計精度要求。
3軟件系統設計
通過上位機對BMP圖片解碼,提取圖片信息;下位機接收指令、圖片信息完成打標[3]。
3.1JAVA上位機系統
本設計采用Netbean開發環境開發JAVA上位機,主要功能為:讀取BMP圖片、與下位機Cortex-M4 K60進行通訊,傳輸圖像數據以及設定參數。軟件界面如圖3所示。
3.2BMP圖像數據結構
讀取BMP圖像的數據,必須對BMP圖像的數據結構進行解讀利用。 BMP文件由文件頭、位圖信息頭、顏色信息和圖形數據4部分組成。以下舉例BMP文件頭的數據結構,BMP文件頭數據結構含有BMP文件的類型、文件大小和位圖起始位置等信息,其結構定義如下: typedef struct tagBITMAPFILEHEADER {WORDbf Type; // 位圖文件的類型,必須為BMP(0~1字節) DWORD bfSize; // 位圖文件的大小,以字節為單位(2~5字節) WORD bfReserved1; // 位圖文件保留字,必須為0(6~7字節) WORD bfReserved2; // 位圖文件保留字,必須為0(8~9字節) DWORD bfOffBits; // 位圖數據的起始位置,以相對于位圖(10~13字節) } BITMAPFILEHEADER; 本設計主要提取BMP圖像的寬度、文件頭的偏移量數據,其它復雜的數據信息可以不作處理,程序上,利用數組保存寬度、偏移量數據[34]。int x1=data[18].x2=data[19],d1=data[10],d2=data[11] 從偏移量所在的地址開始逐行讀取圖片數據,有了BMP圖像數據后將數據發送給下位機。
3.3下位機
Cortex-M4 K60為32位處理器,本設計采用MK60DN512ZVLQ10,標準頻率可達100M,512K flash,128K RAM。該處理器自帶4個串口,用來傳輸數據的同時也方便查看數據[5];引腳豐富,滿足控制需求;在大內存條件下,能定義一個10 240長度的數組來存儲圖像數據,滿足一般圖像寬度長度。
3.3.1數據接收 對應上位機的數據傳輸格式,下位機根據通信協議進行對應的數據接收。如圖4所示。
3.3.2創建任務 本設計利用μCOS嵌入式系統,有效地管理M4 K60的內存分配、任務調度、管理中斷,使上下位機通訊穩定,圖片數據保存準確。 μCOS嵌入式系統的應用在于調用系統的庫函數,最簡單的應用可以是調用任務創建函數創建一個任務,在任務內編寫所需程序,如圖5所示。
調用OSTaskCreateExt函數,把各個程序部分創建為各個任務,在任務中運行各部分程序,再利用其它函數來協調配合[6]。
3.3.3打標 當上位機提取到圖像的寬度后,X軸步進電機打標一行的步數就確定下來,X軸步進電機帶動激光頭進行行運動,X軸每走一步激光頭對每個點進行灼燒打標,這里灼燒的時間,與BMP圖上的像素點對應的灰度值成正比。簡單來說,點越黑,燒得越久,直到行打標完畢,X軸步進電機帶動激光頭返回行原點,然后Y軸前進一步;循環下去一直到圖像數據結束,該部分程序由以下方式實現,如圖6所示。
4結語
本文提出了基于 STM32 的激光打標機控制器設計方案。通過分析激光打標機功能需求,選擇CortexM4 K60 作為主控芯片,對于光路控制,選取高精度、抗干擾能力強的系統,而激光器則選擇高穩定性的脈沖光纖激光器。根據系統方案,完成了激光打標機控制器的硬件電路設計,主要包括最小系統及其外圍電路設計、系統接口電路設計、激光器接口電路設計等。所使用的校正方法是在已有研究的基礎上,直接對理論打標點坐標值進行二次多項式擬合,從而得到新的打標值,而不需要對中間量偏轉角進行幾次轉換,降低了計算復雜度。
參考文獻:[1]閆偉強.基于ARM+FPGA的激光打標機控制器的設計[D].南京:南京理工大學,2014.
[2]朱萍.激光加工技術發展現狀及展望[J].安徽科技,2013(1):5152.
[3]唐海繽.激光打標機的標刻質量及評判標準的研究[D].成都:電子科技大學,2012.
[4]宋志明.基于嵌入式系統的激光打標控制軟件設計[D].南京.南京理工大學,2010.
[5]周洪瑩.激光標記二維條碼在皮革上的應用研究[D].濟南:山東大學,2012.
[6]楊杰.激光打標機控制系統的研究[D].武漢:武漢紡織大學,2014.
(責任編輯:陳福時)
猜你喜歡
家庭影院技術(2021年7期)2021-08-14 02:58:44
電子制作(2019年7期)2019-04-25 13:17:14
成都信息工程大學學報(2018年4期)2019-01-23 06:57:18
電子制作(2018年18期)2018-11-14 01:48:16
電子制作(2018年16期)2018-09-26 03:27:18
鐵道通信信號(2018年2期)2018-04-18 12:18:23
制造技術與機床(2017年3期)2017-06-23 08:11:50
電子制作(2017年8期)2017-06-05 09:36:15
電鍍與環保(2016年3期)2017-01-20 08:15:32
單片機與嵌入式系統應用(2014年9期)2014-03-11 15:35:13