C型獨立液貨罐焊接接頭的疲勞載荷研究
2017-06-21 10:44:58沈秋彬吳劍國3洪英牛
船舶 2017年3期
關鍵詞:船舶
沈秋彬吳劍國,3洪 英牛 松
(1. 浙江工業大學 建筑工程學院 杭州310014; 2. 中國船級社技術中心 上海200135;3.杭州弘能船舶設計有限公司 杭州310023)
C型獨立液貨罐焊接接頭的疲勞載荷研究
沈秋彬1吳劍國1,3洪 英2牛 松2
(1. 浙江工業大學 建筑工程學院 杭州310014; 2. 中國船級社技術中心 上海200135;3.杭州弘能船舶設計有限公司 杭州310023)
針對C型獨立液貨罐的特點,提煉出C型獨立液貨罐的疲勞計算工況;按照IGC規則推導了高周疲勞動壓力計算公式,并且與中國船級社《船舶結構疲勞強度指南》中的等效設計波法計算的疲勞載荷作了對比;此外,還討論了蒸汽壓力、溫度變化等低周疲勞載荷,解決了C型獨立液貨罐疲勞計算的關鍵問題。
氣體運輸船;C型獨立液貨罐;焊接接頭;疲勞載荷
引 言
為充分利用氣體運輸船的艙容,裝載LNG、LPG的C型獨立液貨罐常采用雙聯圓筒獨立液貨罐形式(即雙體罐),近年來又提出星形三體罐。由于受船舶搖晃、蒸汽內壓、溫度變化等交變載荷的作用,雙體罐和三體罐罐體之間焊接接頭(見下頁圖1)的疲勞損傷越來越受到業界的重視,也成為C型艙氣體運輸船大型化必須解決的有關結構安全的關鍵問題之一。IGC規則中對此提出要求,但未具體規定[1],中國船級社《船體結構疲勞指南》[2](以下簡稱《疲勞指南》)主要是針對各類船體結構,對C型獨立液貨罐不能完全適用,尤其是疲勞載荷方面。
C型液貨罐的疲勞載荷主要為液貨動壓力、液貨罐溫度作用和蒸氣壓力。按照載荷的循環次數,液貨動壓力為高周載荷,溫度作用、蒸氣壓力的變化為低周載荷,其中高周載荷因C型罐的液貨動壓力需滿足IGC規則(不同于普通液貨船),而低周疲勞載荷則是LNG船和LPG船特有的。
本文給出了C型獨立液貨罐的計算工況,推導出其高周動壓力計算公式,討論了蒸汽壓力、溫度變化等低周疲勞載荷,為C型獨立液貨罐的疲勞計算打下堅實基礎。
1 工 況
1.1 裝載工況
參照CCS《疲勞指南》的LNG 船相關規定,擬設定C型獨立液貨罐疲勞評估裝載工況為滿罐工況和空罐工況,具體要求見表1。

表1 C型液貨罐疲勞評估的裝載工況
1.2 計算工況
計算工況按CCS《散裝運輸液化氣體船舶構造與設備規范》[3](以下簡稱《散液船規范》)取用,由于靜橫傾工況是用于靜強度校核的靜橫傾工況,與疲勞載荷無關;碰撞意外工況很少發生;試驗工況也是偶然發生。而且C型獨立液貨罐一般晃蕩不嚴重(對于少數晃蕩嚴重的則可加裝制蕩艙壁[4]來減輕),因此,這些工況在疲勞計算時均可忽略不計。這樣,C型獨立液貨罐的計算工況僅剩下直接計算工況的垂蕩工況和橫搖工況。
2 高周載荷——船舶運動載荷
2.1 船舶運動加速度
參照新的散貨船、油船協調共同規范[5],選取載荷長期值概率水平為10-2,此時形狀參數從0.8~1.2時,疲勞損傷的變化最小[6]。CCS《散液船規范》規定船長超過50 m,并以(或接近)營運速度航行的船舶,對應于北大西洋10-8概率水平船舶運動而產生的加速度分量指導公式。本文通過航區系數fr和概率水平系數fp換算出相應航區10-2概率水平的加速度分量計算公式。由于C型液貨罐直接計算僅慮考垂蕩和橫搖的作用,故縱向加速度不再列出。
垂向加速度:
橫向加速度:
式中:αz和αy為相應方向上的最大無因次加速度(即相對于重力加速度),計算時,可以認為它們是分別作用的,αz不包括靜重力分量,αy包括橫搖在橫方向上引起靜重力分量;L0為計算船長,m;Cb為方形系數;B為船舶最大型寬,m;x為船舯到裝貨的液貨罐重心之間的縱向距離(船舯前,x為正值;船舯后,x為負值),m;y為中縱線到裝貨的液貨罐重心之間的橫向距離,m;z為船舶的實際水線到裝貨的液貨罐重心之間的垂向距離(水線以上,z為正值;水線以下,z為負值),m;K通常為1。對于特殊的裝載工況和船型,K值可按下式確定:K=12GM/B(其中:K≥1,GM為靜穩心高度,m);V為營運速度,kn;fr為航區系數,按照CCS《疲勞指南》的航區系數fr定義,見表2;fp為概率水平系數,按照CCS《疲勞指南》對應10-2概率的航區系數fp定義如下:
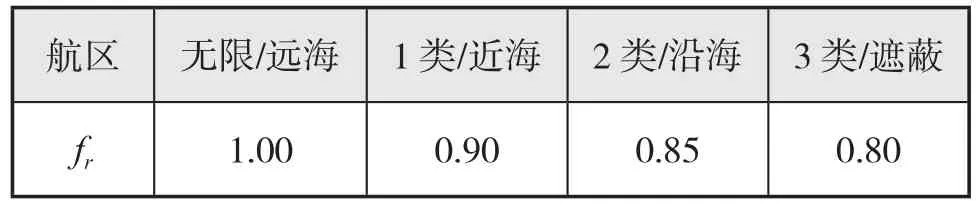
表2 航區系數取值
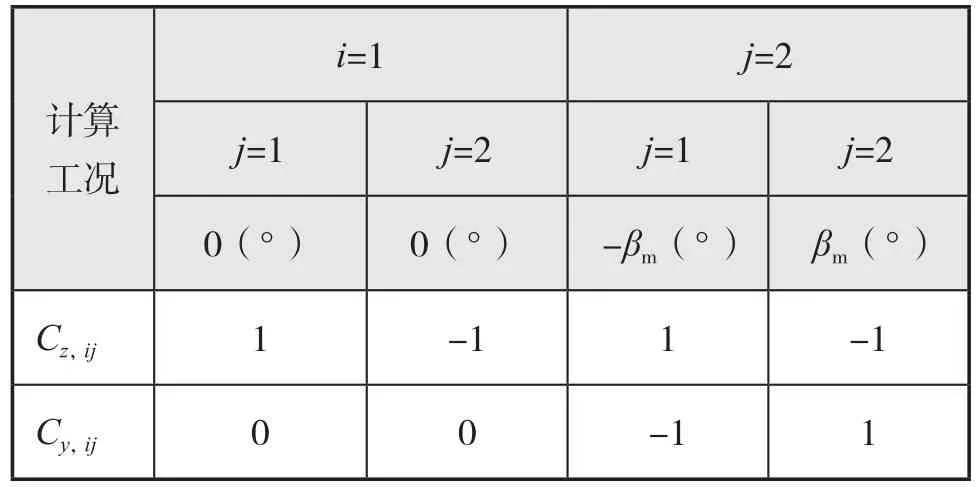
表3 載荷組合因子LCF
2.2 液貨罐疲勞動壓力計算
CCS《散液船規范》給出了內部液體壓力Pgd的計算公式:
式中:αβ為在任意的β方向上,由重力和動載荷引起的無因次加速度(即相對于重力加速度),見下頁圖2 。對于大型液貨船,建議使用計及橫向、垂直和縱向加速度的加速度橢球;Zβ為從所決定的壓力點沿β方向向上量至液貨艙殼板的最大液柱高度(見下頁圖3),m;ρ為設計溫度時的最大貨物密度,kg/m3。
2.2.1 αβ的計算
加速度橢圓如圖2所示,液罐重心到左半橢圓上一點的的距離表示橫搖角為負值時的無因次加速度,液罐重心到右半橢圓上一點的的距離表示橫搖角為正值時的無因次加速度。
對于y-z平面,平面橢圓方程與液罐重心到左半橢圓上一點的直線方程見式(6):
平面橢圓方程與液罐重心到右半橢圓上一點的直線方程見式(7):
通過求解以上兩個方程組和幾何關系,可得如圖2所示無因次加速度
2.2.2 Zβ的計算
由圖3(a)可得雙體罐的Zβ:
2.2.3 雙體罐動壓力計算公式
對于指定的β1,將式(8)和式(11)帶入式(5),得罐體上坐標為(y,z)的壓力點的壓力為:
對于指定的β2,將式(9)和式(10)式帶入式(5),得罐體上坐標為(y,z)的壓力點的壓力為:
2.2.4 三體罐動壓力計算公式
對于指定的β1和β2,由動壓力計算公式可得罐體上坐標為(y,z)的壓力點的壓力:
2.3 疲勞動壓力對比
以70 000 m3雙體罐為例,罐體編號如圖4所示,按照IGC規則計算的疲勞動壓力與按照《疲勞指南》計算的疲勞動壓力對比如下頁圖5所示。結果表明,按IGC規則計算的疲勞動壓力明顯大于按照《疲勞指南》計算的疲勞動壓力。
3 低周載荷
蒸汽壓力為液貨罐的內外氣壓差,溫度作用為液貨罐的溫差。根據調研和《散液船規范》的規定,低周疲勞載荷以液貨船一個往返航次為一個循環,期間罐體所經歷的最大作用為:
滿罐 罐體最大操作壓力為設計蒸氣壓力P0,罐體最低操作溫度為-163℃。
空罐 罐體最小操作壓力為0 MPa,罐體最高操作溫度為20℃。
由此便可確定蒸汽循環壓力和循環溫差作用,見表4和下頁圖6。
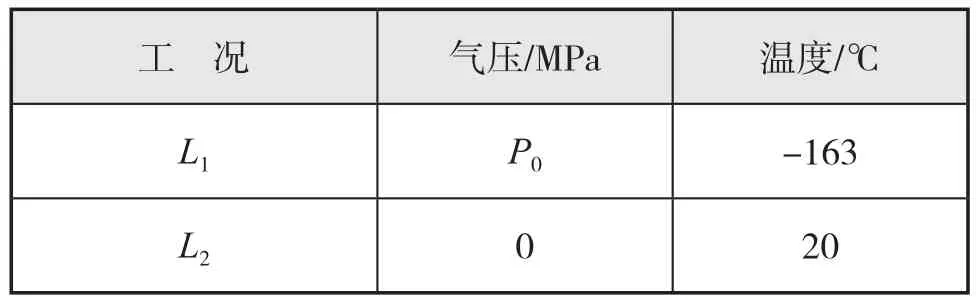
表4 蒸汽循環壓力和循環溫差作用
低周疲勞載荷循環次數取20年設計壽命期間實際發生的裝卸貨次數,但不小于《IGC》關于20年使用期的裝卸貨次數不少于103的要求。因此,交變載荷循環時序示意圖見下頁圖6,每7.3天一次循環,每次循環中壓力與溫度的變化關系是同時變化的。
4 結 論
本文針對C型獨立液貨罐的特點,推導其高周動壓力計算公式。由計算可知,本文給出的疲勞載荷比《疲勞指南》中的等效設計波法計算的疲勞載荷更加合理,符合IGC規則的要求,且計算過程比等效設計波法更簡便,還論述了蒸汽壓力、溫度變化等低周疲勞載荷。本文工作及成果對C型獨立液貨罐疲勞載荷要求的制定具有重要意義。
[1]IMO. MSC-93/3. Amendments to the International Code for the Construction and Equipment of Ships Carrying Liquefied Gases in Bulk (IGC Code)[S]. 2013.
[2]中國船級社. 船體結構疲勞強度指南(2014)[S]. 北京:人民交通出版社, 2014.
[3]中國船級社. 散裝運輸液化氣體船舶構造與設備規范[S]. 北京: 人民交通出版社, 2016.
[4]黎志昌,方江敏,付小方. LNG運輸船C型獨立液貨艙載荷及應力分析[J]. 船舶工程,2011(1):1-4.
[5]IACS. Common structural rules for bulk carriers and oil tankers[S]. 2012.
[6]IACS. Technology background[S]. 2012.
MARIC加入無人貨物運輸船開發聯盟
3月31日,由海航集團旗下的海航智造投資發展有限公司發起的無人貨物運輸船開發聯盟(以下簡稱聯盟)籌備會在上海召開,中國船舶及海洋工程設計研究院(MARIC)的副院長沈偉平先生作為代表參會并簽署了入盟意向書。參會的其他單位包括DNV、ABS、CCS、七一一研究所以及海航科技物流集團有限公司等。
無人貨物運輸船目前在全球還屬于概念設計及實驗階段。隨著大數據、互聯網+、人工智能及機器人等新興技術突飛猛進,船舶自動化水平逐步提高,這些都為無人運輸船舶的實現提供了技術支撐,無人貨物運輸船將會成為未來海運發展的新趨勢。
此次聯盟囊括了船東、船廠、設計院、船級社、設備集成商,覆蓋了從設計、建造、營運、監管的全部環節。各成員單位將在歐美航線規劃、港口協調、國內政策更新及法規制定、無人船舶總體開發設計、無人船舶動力及控制系統研究、無人船舶操縱軟件設計等方面進行共同探索和開發,各方將充分展現自己擅長領域的長板,最大程度發揮集成創新的優勢,圍繞共同的目標一起努力。
近年來, MARIC逐步進入智能船舶領域的研究,參與了國家工信部課題“智能船舶頂層設計及部分智能系統應用”,并完成了大型集裝箱船智能船落地方案的總體設計。通過課題研究,對該領域國內外廠商的技術現狀以及國內系統集成的要點等問題有了一定程度的認知。作為聯盟發起人中唯一的船舶總體研發單位,MARIC將借助自身雄厚的技術力量和對無人智能船舶的長期跟蹤研究經驗,在無人貨物運輸船相關技術的研發、設計、試驗等工作方面同各協作單位通力合作,確保在項目實施周期內完成令聯盟滿意的答卷。
此次聯盟的籌建旨在開展無人貨物運輸船研發和制造并投入營運,計劃3個月完成聯盟籌建工作,確定目標船型、編制聯盟計劃,力爭在2022年交付并運營全球首艘無人貨物運輸船,成為未來航運模式的開拓者。
Study of fatigue loads on welded joints of type C independent liquid cargo tank
SHEN Qiu-Bin1WU Jian-guo1,3Hong Ying2Niu Song2
(1.College of Architectural & Civil Engineering, Zhejiang University of Technology, Hangzhou 310014, China; 2. Rules and Technical Center, CCS, Shanghai 200135, China; 3. Hangzhou Hongneng Ship Design Co., Ltd., Hangzhou 310023, China)
The work conditions in the fatigue calculation of type C independent cargo tanks are proposed according to the characteristics of type C independent cargo tanks. The calculation formula of the high-cycle fatigue dynamic pressure are deduced according to the IGC rules. The results are compared with the fatigue loads calculated by the equivalent design wave approach in "Guidelines for Fatigue Strength of Ship Structure" of CCS. It also discusses the low-cycle fatigue loads as the steam pressure and the change of temperature, and solves the key problem for the fatigue calculation of type C independent cargo tank.
gas carrier; type C independent liquid cargo tank; welded joint; fatigue load
TG405;U661.4
A
1001-9855(2017)03-0041-07
10.19423 / j.cnki.31-1561 / u.2017.03.041
本文的研究內容由中國船級社資助,研究成果將運用于2017版《散裝運輸液化氣體船舶構造與設備規范》。
2017-02-09;
2017-03-29
沈秋彬(1989-),男,碩士。研究方向:結構工程分析與設計。
吳劍國(1963-),男,博士,教授。研究方向:船舶結構分析和設計。
洪 英(1963-),男,高級工程師。研究方向:船舶結構規范。
牛 松(1982-),男,碩士,高級工程師。研究方向:船舶結構規范。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:08:26
艦船科學技術(2022年14期)2022-09-22 03:07:40
機械工業標準化與質量(2022年6期)2022-08-12 02:07:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30