基于激光導(dǎo)航路徑識(shí)別的實(shí)驗(yàn)室自動(dòng)引導(dǎo)小車(AGV)設(shè)計(jì)
2017-06-26 07:48:28胡艷
裝備制造技術(shù) 2017年5期
關(guān)鍵詞:實(shí)訓(xùn)系統(tǒng)
胡艷
(廣西財(cái)經(jīng)學(xué)院,廣西南寧530003)
基于激光導(dǎo)航路徑識(shí)別的實(shí)驗(yàn)室自動(dòng)引導(dǎo)小車(AGV)設(shè)計(jì)
胡艷
(廣西財(cái)經(jīng)學(xué)院,廣西南寧530003)
AGV實(shí)訓(xùn)過(guò)程中因?qū)Ш疆a(chǎn)生的故障亟待進(jìn)行技術(shù)攻關(guān),本文闡述激光定位與制導(dǎo)的基本原理,并應(yīng)AGV基本功能和實(shí)訓(xùn)教學(xué)之需,提出了基于激光導(dǎo)航路徑識(shí)別AGV硬件和軟件系統(tǒng)的設(shè)計(jì)方案,并對(duì)激光導(dǎo)航AGV的實(shí)訓(xùn)應(yīng)用提出展望性構(gòu)思。
激光;導(dǎo)航;AGV
為提高學(xué)生的動(dòng)手能力,滿足學(xué)生實(shí)訓(xùn)需要,設(shè)置機(jī)械工程、物流和信息智能等專業(yè)的高職院校均創(chuàng)建了實(shí)訓(xùn)實(shí)驗(yàn)室,作為機(jī)械工程自動(dòng)化、物流處理信息化關(guān)鍵設(shè)備的AGV,則是實(shí)訓(xùn)室的重要實(shí)驗(yàn)設(shè)備,對(duì)AGV的操控性能的研究不僅具有重要的理論意義,更具有重要的提升實(shí)訓(xùn)效果的現(xiàn)實(shí)意義。
1 自動(dòng)引導(dǎo)小車(AGV)在實(shí)訓(xùn)中存在問題
1.1 AGV介紹
AGV是一種裝備電子信息控制系統(tǒng)和自動(dòng)導(dǎo)航系統(tǒng),能導(dǎo)向行使、自動(dòng)尋址和移交載荷,實(shí)現(xiàn)程控或無(wú)人駕駛的運(yùn)輸設(shè)備。AGV由于其靈活性、智能化和高效便捷的優(yōu)勢(shì),得到越來(lái)越廣泛的應(yīng)用,現(xiàn)已成為柔性制造系統(tǒng)的重要設(shè)備,也是現(xiàn)代工業(yè)自動(dòng)化物流系統(tǒng)中的關(guān)鍵設(shè)備之一[1]。
就實(shí)訓(xùn)室的AGV而言,其通常采用四輪式電力驅(qū)動(dòng)模式,通過(guò)電子信息控制系統(tǒng)的指令,借助導(dǎo)航系統(tǒng)引導(dǎo)在指定的區(qū)域和軌道內(nèi)移動(dòng)機(jī)械體,實(shí)現(xiàn)物料傳送或搬運(yùn)貨物的自動(dòng)化。一般而言,AGV系統(tǒng)構(gòu)造包括電子信息控制系統(tǒng)、通訊系統(tǒng)、導(dǎo)航系統(tǒng)、電源(動(dòng)力)系統(tǒng)、機(jī)械體組成。如圖1所示。

圖1 AGV系統(tǒng)結(jié)構(gòu)圖
1.2 AGV在實(shí)訓(xùn)中的常見故障
通常而言,實(shí)訓(xùn)室中的AGV(實(shí)訓(xùn)版AGV)是應(yīng)專業(yè)設(shè)置的需求,按照工業(yè)領(lǐng)域的AGV進(jìn)行縮小設(shè)計(jì)制造而成。由于設(shè)計(jì)產(chǎn)生的缺陷和技術(shù)尚未攻克的難關(guān)所致,AGV在實(shí)際運(yùn)行過(guò)程中時(shí)常發(fā)生一些故障。總體來(lái)說(shuō),實(shí)訓(xùn)版AGV小車的常見故障有如下幾種:
一是,AGV對(duì)任何操作程序和操作按鈕無(wú)反應(yīng),即進(jìn)入所謂的死機(jī)狀態(tài);
二是,AGV讀取指令錯(cuò)誤,啟動(dòng)或停止時(shí)間有誤,發(fā)生車體碰撞;
三是,因通訊出錯(cuò),無(wú)法接收操作程序指令,通常有“ERROR”字樣顯示,并伴隨“滴……”的報(bào)警聲;
四是,因?qū)Ш匠绦虺鲥e(cuò)或?qū)Ш绞ъ`,AGV在導(dǎo)航行走過(guò)程中上線失敗或地標(biāo)丟失。
據(jù)筆者的實(shí)訓(xùn)教學(xué)實(shí)踐,導(dǎo)航程序出錯(cuò)或?qū)Ш绞ъ`導(dǎo)致的故障占故障總發(fā)生率的67%.改進(jìn)導(dǎo)航技術(shù),實(shí)現(xiàn)AGV按指令順利行走成為提高實(shí)訓(xùn)教學(xué)效果的迫切之需。激光導(dǎo)航由于其精準(zhǔn)性成為改進(jìn)AGV導(dǎo)航性能首選。
2 激光導(dǎo)航原理
2.1 激光定位原理
激光定位是實(shí)現(xiàn)激光路徑導(dǎo)航的重要前提。簡(jiǎn)單而言,激光定位就是利用AGV機(jī)械體上裝配的高分辨率激光掃描儀或激光雷達(dá)等光源傳感設(shè)備進(jìn)行地標(biāo)掃描,并將掃描獲得的光信號(hào)進(jìn)行精確計(jì)算,以確定AGV的位置和方向,從而進(jìn)行路徑規(guī)劃和導(dǎo)向的定位模式。通常進(jìn)行激光定位時(shí),需要在目標(biāo)環(huán)境中設(shè)定若干路標(biāo),并基于這些固定的路標(biāo),建立坐標(biāo)系,同時(shí),以激光傳感設(shè)備轉(zhuǎn)動(dòng)中心建立傳感設(shè)備坐標(biāo),記錄激光傳感設(shè)備描一周所形成的夾角,經(jīng)精確計(jì)算得出目標(biāo)所處坐標(biāo)的具體位置。激光定位原理如圖2所示。
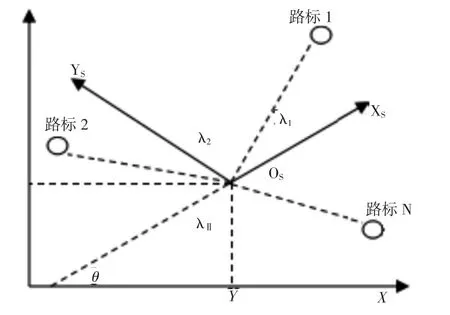
圖2 激光定位系統(tǒng)原理
2.2 導(dǎo)航控制原理
無(wú)論是工業(yè)領(lǐng)域還是實(shí)訓(xùn)室中的AGV,一般而言,其行走路徑大多數(shù)為直線,即便是行走路徑中的轉(zhuǎn)彎,均通過(guò)長(zhǎng)距離的修改簡(jiǎn)化為直線路徑進(jìn)行代替。正因如此,要對(duì)AGV進(jìn)行導(dǎo)航控制其實(shí)就是要對(duì)AGV機(jī)體運(yùn)行路徑過(guò)程中的位置偏差和航向偏差進(jìn)行控制[2]。
具體而言,AGV在具體特定區(qū)域范圍內(nèi)行走時(shí),附在其載體上的激光傳感設(shè)備對(duì)其當(dāng)前位置和環(huán)境以及目標(biāo)位置和環(huán)境進(jìn)行激光掃描探測(cè),并實(shí)時(shí)輸出高精度位置坐標(biāo)信號(hào),以位置坐標(biāo)為基數(shù)進(jìn)行精準(zhǔn)定位,經(jīng)過(guò)精確計(jì)算并形成導(dǎo)航路徑信號(hào),最后由電子信息控制系統(tǒng)和通訊系統(tǒng)向AGV下達(dá)指令信號(hào),控制AGV載體左右兩輪速度與方向,使其沿著預(yù)先設(shè)定的路徑運(yùn)行。如圖3所示。
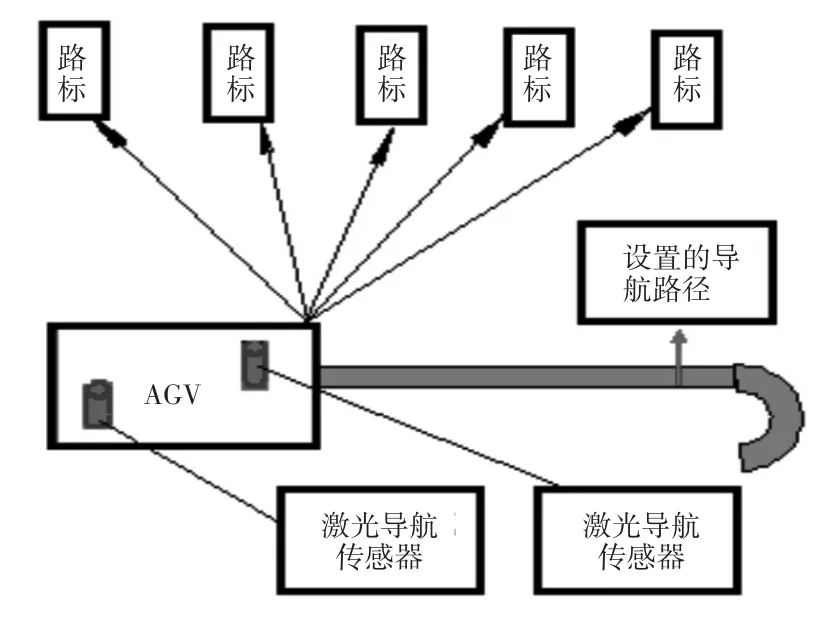
圖3 導(dǎo)航控制原理
3 基于激光導(dǎo)航自動(dòng)引導(dǎo)小車(AGV)系統(tǒng)設(shè)計(jì)
3.1 硬件系統(tǒng)設(shè)計(jì)方案
自動(dòng)引導(dǎo)小車(AGV)的功能需求和工作環(huán)境決定了其設(shè)計(jì)理念和設(shè)計(jì)方案,但不論用于何種領(lǐng)域,激光導(dǎo)航自動(dòng)引導(dǎo)小車(AGV)均包括五個(gè)核心部分,即AGV嵌入式微計(jì)算機(jī)、智能控制系統(tǒng)、導(dǎo)航系統(tǒng)等、無(wú)線通信系統(tǒng)以及動(dòng)力驅(qū)動(dòng)系統(tǒng)。其中,控制系統(tǒng)類似于人類大腦,是最核心的部分;導(dǎo)航系統(tǒng)類似于人類感官,主要滿足AGV內(nèi)外環(huán)境感知與運(yùn)動(dòng)操控;無(wú)線通信系統(tǒng)主要用于下達(dá)控制命令;動(dòng)力驅(qū)動(dòng)系統(tǒng)主要為滿足驅(qū)動(dòng)AGV機(jī)械體之需要,使其能行走自如[3]。激光導(dǎo)航機(jī)器人硬件設(shè)計(jì)方案如圖4所示。
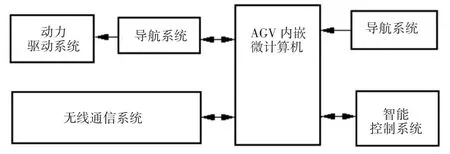
圖4 激光導(dǎo)航AGV硬件設(shè)計(jì)方案
3.2 軟件系統(tǒng)設(shè)計(jì)方案
軟件系統(tǒng)的設(shè)計(jì)必須緊緊圍繞AGV功能需求,使其功能得以充分的實(shí)現(xiàn)[4]。根據(jù)實(shí)訓(xùn)AGV的需求和硬件設(shè)計(jì)方案,筆者將軟件設(shè)計(jì)方案思路鎖定為:AGV軟件系統(tǒng)盡可能簡(jiǎn)單實(shí)用,同時(shí)必須滿足對(duì)AGV機(jī)械體驅(qū)動(dòng)器、無(wú)線通信系統(tǒng)、光電傳感器等硬件系統(tǒng)的控制(包括初始化、控制信號(hào)的輸出和返回信號(hào)的獲取等),還要實(shí)現(xiàn)包括對(duì)信息顯示、傳感器信號(hào)的處理和模糊控制算法等。
按照這一思路,將AGV軟件系統(tǒng)進(jìn)行模塊化設(shè)計(jì),即AGV軟件系統(tǒng)由系統(tǒng)主程序和各功能子程序組成[5]。主程序主要完成系統(tǒng)初始化、界面的顯示(包括模式選擇界面和模式信息界面等)、各模式之間的切換等功能。各功能子程序主要包括信號(hào)獲取和讀取、激光傳感位置獲取、激光導(dǎo)航位置信息顯示、模糊控制算法和自動(dòng)驅(qū)動(dòng)等子程序[6]。激光導(dǎo)航AGV軟件系統(tǒng)設(shè)計(jì)方案如圖5所示。

圖5 激光導(dǎo)航機(jī)器人軟件系統(tǒng)設(shè)計(jì)方案
4 激光導(dǎo)航AGV實(shí)訓(xùn)應(yīng)用測(cè)試
4.1 光掃描導(dǎo)引
沿著路徑從高處用光束進(jìn)行掃描,計(jì)算機(jī)根據(jù)光信息(掃描角度以及掃描裝置標(biāo)號(hào)),精密檢測(cè)出AGV現(xiàn)在的位置(如圖6所示)。這種方法路徑變換容易,掃描方式最簡(jiǎn)單。
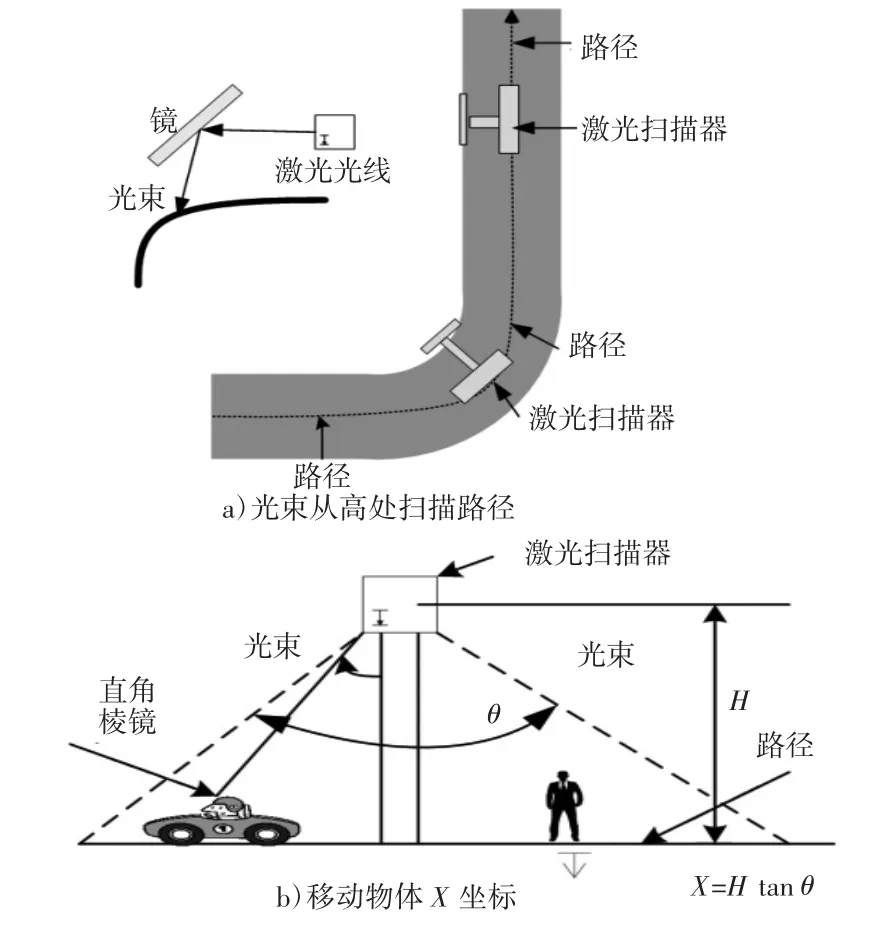
圖6 光掃描引導(dǎo)
4.2 信標(biāo)方式
這種方式是在路徑上或沿著路徑設(shè)置多個(gè)標(biāo)記,標(biāo)記本身主動(dòng)發(fā)出信號(hào)提供有關(guān)位置信息。信標(biāo)方式是從現(xiàn)在位置尋找若干個(gè)信標(biāo),然后根據(jù)其方向和有關(guān)信標(biāo)的位置信息,利用三角測(cè)量原理計(jì)算出現(xiàn)在的位置,其具體過(guò)程如圖7所示。
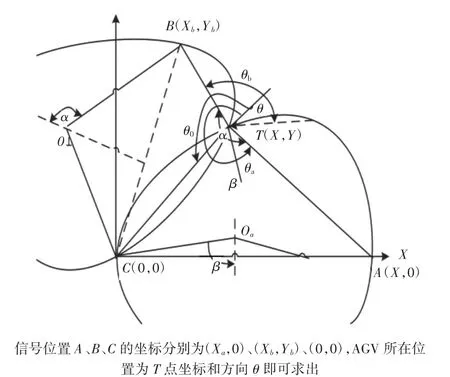
圖7 信標(biāo)引導(dǎo)
5 結(jié)束語(yǔ)
隨著AGV廣泛應(yīng)用,其市場(chǎng)需求也隨之不斷增長(zhǎng),激光導(dǎo)航應(yīng)用可以使AGV實(shí)現(xiàn)了虛擬路徑規(guī)劃與導(dǎo)向,實(shí)現(xiàn)AGV的安全無(wú)障礙行走,甚至掀起AGV調(diào)度領(lǐng)域的一場(chǎng)革命。筆者提出的基于激光導(dǎo)航路徑識(shí)別的實(shí)驗(yàn)室自動(dòng)引導(dǎo)小車(AGV)設(shè)計(jì)方案或更能滿足高職院校實(shí)訓(xùn)需求,進(jìn)一步提升這一方向的實(shí)訓(xùn)效果。
[1]唐文偉.AGV在物流領(lǐng)域中的應(yīng)用前景分析[J].物流技術(shù),2001(3):7-8.
[2]OGATA K.現(xiàn)代控制工程[M].美國(guó):普倫蒂斯-霍爾公司,1997.
[3]吳啟平.自動(dòng)導(dǎo)引車(AGV)關(guān)鍵技術(shù)現(xiàn)狀及其發(fā)展趨勢(shì)[J].制造業(yè)自動(dòng)化,2013,35(5):106-109.
[4]張正義.AGV技術(shù)發(fā)展綜述[J].物流技術(shù)與應(yīng)用,2005(7):67-73.
[5]任小龍,溫浩宇,李華.無(wú)向Petri網(wǎng)的多AGV最優(yōu)路徑方法研究[J].西安電子科技大學(xué)學(xué)報(bào),2008,35(3):517-522.
[6]馬志遠(yuǎn).智能控制下的AGV路徑規(guī)劃研究[J].機(jī)械與自動(dòng)化,2013(10):98.
Design of Laboratory Automatic Guiding Vehicle(AGV)Based on Laser Navigation Path Identification
HU Yan
(Guangxi University of Finance and Economy,Nanning Guangxi 530003,China)
In the process of AGV practical training,it is urgent to solve the problems caused by navigation.This paper expounds the basic principle of laser positioning and guidance,and puts forward the design of AGV hardware and software system based on laser navigation path recognition applied to AGV basic function and practical training needs,and present expectation to the practical training application of laser navigation AGV.
laser;navigation;AGV
TN249
A < class="emphasis_bold">文章編號(hào):1
1672-545X(2017)05-0019-03
2017-02-28
胡艷(1979-),女,湖南婁底人,碩士研究生,講師,致力于高校實(shí)訓(xùn)室管理工作,研究方向?yàn)閿?shù)據(jù)處理和軟件工程。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2020年12期)2020-05-22 09:25:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
福建教育學(xué)院學(xué)報(bào)(2019年4期)2019-06-12 08:39:10
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
計(jì)算機(jī)測(cè)量與控制(2017年6期)2017-07-01 16:23:53
電子制作(2017年8期)2017-06-05 09:36:15
