
對心直動滾子推桿盤形凸輪機(jī)構(gòu)的運(yùn)動分析
2017-06-26 07:49:16關(guān)鋒
裝備制造技術(shù) 2017年5期
關(guān)鋒
(山西機(jī)電職業(yè)技術(shù)學(xué)院,山西長治046011)
對心直動滾子推桿盤形凸輪機(jī)構(gòu)的運(yùn)動分析
關(guān)鋒
(山西機(jī)電職業(yè)技術(shù)學(xué)院,山西長治046011)
利用Pro/E軟件對心直動滾子推桿盤形凸輪機(jī)構(gòu)進(jìn)行運(yùn)動分析,得到了位移、速度和加速度的仿真結(jié)果,為后續(xù)的機(jī)構(gòu)優(yōu)化提供了一定的理論基礎(chǔ)。
凸輪機(jī)構(gòu);Pro/E;運(yùn)動分析
凸輪機(jī)構(gòu)是機(jī)械中的一種常用機(jī)構(gòu),在自動化和半自動化機(jī)械中應(yīng)用非常廣泛。凸輪機(jī)構(gòu)由凸輪、從動件和機(jī)架3個基本構(gòu)件組成的一種高副機(jī)構(gòu)。只要能夠設(shè)計出凸輪輪廓曲線,從動件就可以得到各種預(yù)期的運(yùn)動規(guī)律[1]。采用Pro/E軟件進(jìn)行分析,可使設(shè)計更加方便,為后續(xù)的機(jī)構(gòu)優(yōu)化提供一定的理論基礎(chǔ)。
1 凸輪設(shè)計思路
設(shè)計者需要確定凸輪的基圓半徑,根據(jù)從動件推桿的運(yùn)動規(guī)律,能夠解算出凸輪理論輪廓曲線的解析方程。然后在Pro/E軟件建模環(huán)境中輸入變量和表達(dá)式方程來創(chuàng)建凸輪的理論輪廓曲線。首先輸入變量和驅(qū)動參數(shù),然后輸入計算變量x和y。表達(dá)式的形式會隨著轉(zhuǎn)角的變化而發(fā)生相應(yīng)的變化。所以,除此以外還必須根據(jù)轉(zhuǎn)角的條件,寫出相應(yīng)的凸輪輪廓曲線的數(shù)學(xué)表達(dá)式,最后繪制出它們的圖形。
完成數(shù)學(xué)表達(dá)式后,在Pro/E軟件建模的環(huán)境中選擇“插入”中“模型基準(zhǔn)”的“曲線”命令,也可以通過單擊繪圖區(qū)右側(cè)的圖標(biāo),系統(tǒng)會自動彈出“曲線選項”的菜單,選定“從方程”的選項。選擇合適的坐標(biāo)系后,設(shè)置t為系統(tǒng)變量,然后用定義的x和y來表示Pro/E系統(tǒng)坐標(biāo)中的變量,同時把z定義為常量0,得到凸輪理論輪廓曲線。當(dāng)分別插入不同階段的理論輪廓曲線之后,通過掃描法可以將理論輪廓曲線可以作為掃描軌跡線,向內(nèi)作距離為滾子半徑的掃描曲面或者偏移曲線,進(jìn)而得到凸輪的實際輪廓曲線或曲面。最后將凸輪的實際輪廓曲線進(jìn)行拉伸的操作,拉伸值為凸輪的厚度值,便可以得到凸輪的三維實體模型。
2 凸輪機(jī)構(gòu)實例
某企業(yè)需要設(shè)計一對心直動滾子推桿盤形凸輪機(jī)構(gòu)。推桿的運(yùn)動規(guī)律為:當(dāng)凸輪轉(zhuǎn)過90°時,推桿等加速等減速上升15 mm;凸輪繼續(xù)轉(zhuǎn)過90°時,推桿停止不動;凸輪再繼續(xù)轉(zhuǎn)過60°時,推桿等加速等減速下降15 mm;凸輪轉(zhuǎn)過余下的120°時,推桿又停止不動。假設(shè)凸輪是逆時針方向等速轉(zhuǎn)動的圓周運(yùn)動,基圓半徑是50 mm,推桿滾子半徑是10 mm,凸輪的中央孔徑為20 mm,厚度為25 mm.
3 凸輪機(jī)構(gòu)的三維模型
當(dāng)利用Pro/E系統(tǒng)創(chuàng)建由方程描述的各種曲線時,必須將曲線方程的數(shù)學(xué)表達(dá)式轉(zhuǎn)化為Pro/E系統(tǒng)中的相應(yīng)表達(dá)式[2]。根據(jù)對心直動滾子推桿盤形凸輪輪廓曲線的數(shù)學(xué)表達(dá)式的情況,通過在Pro/E記事本中可以創(chuàng)建與之所對應(yīng)的數(shù)學(xué)表達(dá)式。t是從0到1的取值范圍。
(1)已知條件,驅(qū)動參數(shù)為
h=15/*升程,長度,單位為mm
r0=50/*基圓半徑,長度,單位為mm
rr=10/*滾子半徑,長度,單位為mm
rb=10/*凸輪中央圓孔半徑,長度,單位為mm
fai1=90/*推程轉(zhuǎn)角,角度,單位為degree
fai2=90/*遠(yuǎn)休止角,角度,單位為degree
fai3=60/*回程轉(zhuǎn)角,角度,單位為degree
fai4=120/*近休止角,角度,單位為degree
(2)推程等加速階段:fai1=90
a1=0/*起始角,角度,單位為degree
b1=fai1/2/*終止角,角度,單位為degree
fai=a1*(1-t)+b1*t/*中間角變量,角度,單位為degree
s1=2*h*fai*fai/(fai1*fai1)/*升程變量,長度,單位為mm
x=(r0+s1)*sin(fai)/*理論輪廓曲線x坐標(biāo)值,長度,單位為mm
y=(r0+s1)*cos(fai)/*理論輪廓曲線y坐標(biāo)值,長度,單位為mm
(3)推程等減速階段:fai1=90
a2=fai1/2/*起始角,角度,單位為degree
b2=fai1/*終止角,角度,單位為degree
fai=a2*(1-t)+b2*t/*中間角變量,角度,單位為degree
je=fai1-fai/*中間角變量,角度,單位為degree
s2=h-2*h*je*je/(fai1*fai1)/*升程變量,長度,單位為mm
x=(r0+s2)*sin(fai)/*理論輪廓曲線x坐標(biāo)值,長度,單位為mm
y=(r0+s2)*cos(fai)/*理論輪廓曲線y坐標(biāo)值,長度,單位為mm
(4)遠(yuǎn)休止階段:fai2=90
a3=fai1/*起始角,角度,單位為degree
b3=fai1+fai2/*終止角,角度,單位為degree
fai=a3*(1-t)+b3*t/*中間角變量,角度,單位為degree
s3=h/*升程變量,長度,單位為mm
x=(r0+s3)*sin(fai)/*理論輪廓曲線x坐標(biāo)值,長度,單位為mm
y=(r0+s3)*cos(fai)/*理論輪廓曲線y坐標(biāo)值,長度,單位為mm
(5)回程等加速階段:fai3=60
a4=fai1+fai2/*起始角,角度,單位為degree
b4=a4+fai3/2/*終止角,角度,單位為degree
fai=a4*(1-t)+b4*t/*中間角變量,角度,單位為degree
je4=fai-a4/*中間角變量,角度,單位為degree
s4=h-2*h*je4*je4/(fai3*fai3)/*升程變量,長度,單位為mm
x=(r0+s4)*sin(fai)/*理論輪廓曲線x坐標(biāo)值,長度,單位為mm
y=(r0+s4)*cos(fai)/*理論輪廓曲線y坐標(biāo)值,長度,單位為mm
(6)回程等減速階段:fai3=60
a5=fai1+fai2+fai3/2/*起始角,角度,單位為degree
在t2n-3至t2n-1階段,可以假設(shè)信標(biāo)節(jié)點相對靜止不動,因此節(jié)點B相對于節(jié)點A的移動距離即為dAB(t2n-1,t2n-1)-dAB(t2n-3,t2n-3).CB-Sync算法通過1.3節(jié)估計的多普勒規(guī)模因子η,可求得在t2n-3和t2n-1階段的平均移動速度
b5=fai1+fai2+fai3/*終止角,角度,單位為degree
fai=a5*(1-t)+b5*t/*中間角變量,角度,單位為degree
je5=fai-fai1-fai2-fai3/*中間角變量,角度,單位為degree
s5=2*h*je5*je5/(fai3*fai3)/*升程變量,長度,單位為mm
x=(r0+s5)*sin(fai)/*理論輪廓曲線x坐標(biāo)值,長度,單位為mm
y=(r0+s5)*cos(fai)/*理論輪廓曲線y坐標(biāo)值,長度,單位為mm
(7)近休止階段:fai4=120
a6=fai1+fai2+fai3/*起始角,角度,單位為degree
fai=a6*(1-t)+b6*t/*中間角變量,角度,單位為degree
s6=0/*升程變量,長度,單位為mm
x=(r0+s6)*sin(fai)/*理論輪廓曲線x坐標(biāo)值,長度,單位為mm
y=(r0+s6)*cos(fai)/*理論輪廓曲線y坐標(biāo)值,長度,單位為mm
這一工作一般情況下可以通過選擇“插入”中“模型基準(zhǔn)”的“曲線”命令來實現(xiàn)。在系統(tǒng)彈出的“曲線選項”菜單中只需選取“從方程”選項,即可以利用輸入的曲線方程式精確地創(chuàng)建凸輪理論輪廓曲線如圖1所示。依據(jù)凸輪曲線構(gòu)建的凸輪的三維實體模型如圖2所示。在此基礎(chǔ)上創(chuàng)建機(jī)座及從動件,并完成凸輪機(jī)構(gòu)的裝配,如圖3所示,為凸輪機(jī)構(gòu)的運(yùn)動分析提供基礎(chǔ)。
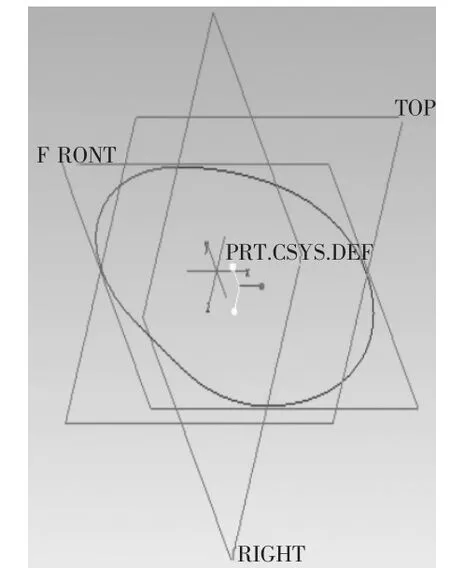
圖1 凸輪理論輪廓曲線

圖2 凸輪實體模型

圖3 凸輪機(jī)構(gòu)實體模型
3.1 凸輪機(jī)構(gòu)的運(yùn)動分析
在繪圖區(qū)右側(cè)單擊生成測量結(jié)果圖標(biāo),系統(tǒng)會自動彈出“測量結(jié)果”的對話框[3]。單擊新建測量圖標(biāo),彈出“測量定義”對話框,名稱默認(rèn)為measure1,在“類型”選項框中選擇“位置”選項,在“點或運(yùn)動軸”選項框中點擊選擇圖標(biāo)后選取繪圖區(qū)連桿上的某一點(如圖4所示)作為分析點,在“分量”選項框中選擇“Y分量”,完成后“測量定義”對話框如圖5所示。按照同樣的步驟,測量速度與加速度,設(shè)置完成后的“測量定義”速度和加速度對話框如圖6和圖7所示。最后單擊“確定”按鈕,出現(xiàn)“測量結(jié)果”的對話框,如圖8所示。

圖4 選取推桿上某一分析點
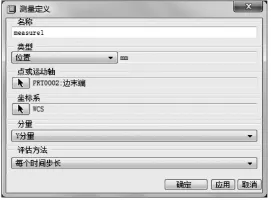
圖5 位置類型的對話框
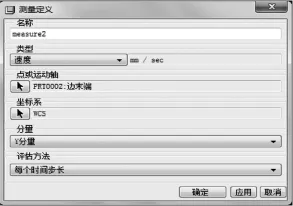
圖6 速度類型的對話框

圖7 加速度類型的對話框
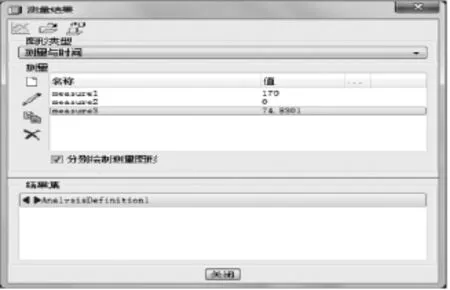
圖8 測量結(jié)果的對話框
然后選中所有的分析項,點擊動態(tài)分析,并勾選“分別繪制測量圖形”。點擊繪制測量結(jié)果圖標(biāo),就可以繪制出位移、速度和加速度的曲線,如圖9所示。

圖7 圖形工具的對話框
3.2 結(jié)果分析
通過凸輪機(jī)構(gòu)的運(yùn)動分析,非常清楚地看到了凸輪機(jī)構(gòu)的運(yùn)動情況,同時得到了從動件推桿在運(yùn)動過程中的位移、速度和加速度曲線[4]。
在運(yùn)動分析的過程中,凸輪旋轉(zhuǎn)一周的時間為3.6 s,推桿頂部上一點為其測量點。從圖7中可以看到,從0 s~0.45 s時(凸輪轉(zhuǎn)過約45°),推桿的位移上升,速度也在上升,加速度不變;從0.45 s~0.9 s時(凸輪又轉(zhuǎn)過約45°),推桿上升至185 mm最高點,與開始位置相比,推桿升程為15 mm(即變化值為170 mm~185 mm),在這個時候速度直線下降,加速度仍然不變,由原來的勻加速變成了勻減速;從0.9 s~1.8 s時(凸輪轉(zhuǎn)過約90°),推桿位移沒變化,速度和加速度都為0;從1.8 s~2.4 s時(凸輪轉(zhuǎn)過約60°),推桿位移下降了15mm,速度在1.8 s~2.1 s時間段勻加速,在2.1 s~2.4 s時間段勻減速,兩段時間范圍內(nèi)加速度等值反向;從2.4 s~3.6 s(凸輪轉(zhuǎn)過約120°),推桿位移沒有變化,速度與加速度都為0.通過分析可知,從動件推桿的運(yùn)動規(guī)律完全能夠滿足設(shè)計的要求。
4 結(jié)束語
本文介紹了Pro/E的三維建模和仿真技術(shù),對凸輪機(jī)構(gòu)進(jìn)行了仿真分析,給后續(xù)的機(jī)構(gòu)優(yōu)化提供了一定的理論基礎(chǔ)。
[1]林勝.基于Pro/E軟件的凸輪機(jī)構(gòu)虛擬設(shè)計與運(yùn)動仿真[J].輕工科技,2016(5):63-64.
[2]楊彬彬.基于Pro/E凸輪機(jī)構(gòu)的仿真設(shè)計[J].企業(yè)技術(shù)開發(fā),2011(21):86-87.
[3]趙仙花,張毅.基于Pro/ENGINEER的凸輪機(jī)構(gòu)的動態(tài)分析設(shè)計[J].焦作大學(xué)學(xué)報,2015,(2):105-107.
[4]周昇,趙靈.基于Pro/E的凸輪的設(shè)計和優(yōu)化[J].機(jī)械工
程師,2013(1):84-86.
Kinematic Analysis of the Cam Mechanism with Straight Moving Roller Follower
GUAN Feng
(Shanxi Institute of Mechanical and Electrical Engineering,Changzhi Shanxi 046011,China)
Taking as an example a set of the cam of the disc cam with the roller follower of the heart,introduces three-dimensional modeling and motion analysis of cam mechanism by using Pro/E graphics software,which verifies the correctness and reliability of the design by analyzing the simulation results of the displacement,velocity and acceleration and it provides a certain theoretical basis for subsequent optimization.
cam mechanism;Pro/E;motion analysis
TP39
A < class="emphasis_bold">文章編號:1
1672-545X(2017)05-0283-04
2017-02-17
關(guān)鋒(1980-),男,山西長治人,碩士,講師,主要從事機(jī)械設(shè)計研究。
