車(chē)載組合導(dǎo)航在陣地勘測(cè)中的應(yīng)用設(shè)計(jì)*
2017-06-27 08:14:34劉建許友哲賈軍強(qiáng)
現(xiàn)代防御技術(shù) 2017年3期
關(guān)鍵詞:測(cè)量
劉建,許友哲,賈軍強(qiáng)
(北京電子工程總體研究所,北京 100854)
車(chē)載組合導(dǎo)航在陣地勘測(cè)中的應(yīng)用設(shè)計(jì)*
劉建,許友哲,賈軍強(qiáng)
(北京電子工程總體研究所,北京 100854)
為提高陣地勘測(cè)的連續(xù)性、精確性和快速性,提高定位定向車(chē)陣地勘測(cè)的環(huán)境適應(yīng)性,在定位定向車(chē)陣地勘測(cè)中首次利用卡爾曼濾波算法進(jìn)行數(shù)據(jù)融合的組合導(dǎo)航,綜合捷聯(lián)慣組、速率計(jì)和高程計(jì)的自主性以及北斗2衛(wèi)星導(dǎo)航的精確性和快速性,通過(guò)定位定向車(chē)多批次的跑車(chē)試驗(yàn)驗(yàn)證,該設(shè)計(jì)實(shí)現(xiàn)了較高的陣地勘測(cè)連續(xù)性以及精確性,基本實(shí)現(xiàn)全區(qū)域的無(wú)縫定位導(dǎo)航陣地勘測(cè)。
BD2;SINS;速率計(jì);高程計(jì);組合導(dǎo)航;陣地勘測(cè)
0 引言
地空導(dǎo)彈作為一種精確制導(dǎo)防空武器,在機(jī)動(dòng)過(guò)程中為了保證兵器投入正常使用需進(jìn)行陣地勘測(cè)[1]。定位定向車(chē)是我國(guó)第3代地空導(dǎo)彈武器系統(tǒng)中的主戰(zhàn)裝備之一,它擔(dān)負(fù)著陣地測(cè)量、武器系統(tǒng)標(biāo)定、引導(dǎo)武器系統(tǒng)機(jī)動(dòng)作戰(zhàn)等任務(wù)[2],在定位定向車(chē)前期陣地勘測(cè)設(shè)計(jì)過(guò)程中,關(guān)注的重點(diǎn)一直是通過(guò)各種理論和應(yīng)用技術(shù)來(lái)提高定位定向精度,利用準(zhǔn)確的位置信息在陣地勘測(cè)過(guò)程中,通過(guò)軍圖實(shí)現(xiàn)行軍路線勘測(cè)和規(guī)劃[3]。對(duì)于陣地勘測(cè)領(lǐng)域,勘測(cè)的準(zhǔn)確性和連續(xù)性即環(huán)境適應(yīng)性,是2個(gè)主要指標(biāo)[4]。本文在原定位定向車(chē)捷聯(lián)慣組和北斗2衛(wèi)星導(dǎo)航設(shè)備基礎(chǔ)上,根據(jù)底盤(pán)狀態(tài)設(shè)計(jì)速率采集方式,引入北斗雙天線定向提供快速方位基準(zhǔn),采用最新的數(shù)據(jù)融合技術(shù),替代原先相對(duì)獨(dú)立工作方式,以捷聯(lián)慣組輸出的定位數(shù)據(jù)為主,利用北斗2衛(wèi)星導(dǎo)航數(shù)據(jù)進(jìn)行組合輸出,以提高陣地勘測(cè)的連續(xù)性。
1 SINS/速率計(jì)/高程計(jì)組合
捷聯(lián)慣組、速率計(jì)和高程計(jì)具有無(wú)依托測(cè)量自主性好的特點(diǎn),它的工作原理建立在牛頓運(yùn)動(dòng)定律之上[5]。高程計(jì)通過(guò)測(cè)量大氣壓強(qiáng),計(jì)算出高程變化值,通過(guò)串行口將高程數(shù)據(jù)發(fā)送給激光捷聯(lián)慣組,速率計(jì)拾取載車(chē)車(chē)輪轉(zhuǎn)速,形成脈沖,發(fā)給激光捷聯(lián)慣組,激光捷聯(lián)慣組定時(shí)計(jì)數(shù),換算出載車(chē)的實(shí)時(shí)速度,根據(jù)測(cè)量的姿態(tài),將速度分解到東西、南北方向,積分得到東西、南北方向載體移動(dòng)的距離,實(shí)現(xiàn)慣性定位、捷聯(lián)慣組、速率計(jì)和高程計(jì)之間的線纜連接如圖1所示。

圖1 慣組、高程計(jì)和速率計(jì)連接示意圖Fig.1 Linking map of the SINS, speedometer and altimeter
定位定向車(chē)目前采用底盤(pán)有北奔和依維柯,北奔底盤(pán)變速箱上有專(zhuān)門(mén)的速率拾取口,通過(guò)軟軸與底盤(pán)的變速箱速率拾取口相連拾取車(chē)輪轉(zhuǎn)速,轉(zhuǎn)化為脈沖信號(hào),發(fā)送給捷聯(lián)慣組,速率計(jì)外形如圖2所示。

圖2 速率計(jì)外形圖Fig.2 Speedometer profile
依維柯底盤(pán)變速箱上沒(méi)有多余的速率拾取口,為拾取底盤(pán)速率信號(hào),在底盤(pán)分動(dòng)箱上安裝霍爾傳感器,傳動(dòng)軸上新加一齒輪,當(dāng)傳動(dòng)軸轉(zhuǎn)動(dòng)的時(shí)候,霍爾傳感器可以敏感到齒輪轉(zhuǎn)動(dòng),轉(zhuǎn)換成脈沖信號(hào),發(fā)送給捷聯(lián)慣組,依維柯底盤(pán)速率拾取裝置如圖3所示。

圖3 依維柯底盤(pán)速率拾取裝置Fig.3 Iveco chassis speed pickup device
SINS/速率計(jì)/高程計(jì)組合根據(jù)慣組提供的航向角和俯仰角采用航位推算算法,利用姿態(tài)、方位和里程信息實(shí)時(shí)推算車(chē)輛相對(duì)于起始點(diǎn)的東向和北向位移[6],利用高程計(jì)敏感的氣壓變化值結(jié)合曲率半徑算法,推算出車(chē)輛位置的經(jīng)緯度變化值,結(jié)合高程計(jì)輸出的高程值,實(shí)時(shí)輸出車(chē)輛位置的經(jīng)度、緯度和高度,SINS/速率計(jì)/高程計(jì)組合導(dǎo)航定位原理如圖4所示。
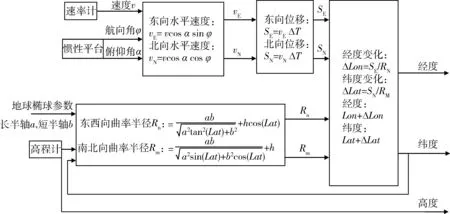
圖4 SINS/速率計(jì)/高程計(jì)組合導(dǎo)航定位原理圖Fig.4 Positioning principle diagram of integrated navigation of SINS/speedometer/altimeter
2 雙天線北斗2衛(wèi)星導(dǎo)航
在區(qū)域防空中,防空兵將在一個(gè)或多個(gè)戰(zhàn)區(qū)參與抗、反一體的大縱深全區(qū)域防空作戰(zhàn),信息傳遞的快速性要求非常高[7]。定位定向車(chē)在進(jìn)行陣地勘測(cè)的過(guò)程中常需進(jìn)行方位傳遞測(cè)量,陣地勘測(cè)過(guò)程中方位測(cè)量傳遞要求快速,精度在1°以內(nèi),利用北斗衛(wèi)星載波相位雙天線定向,可以快速提供方位基準(zhǔn)。北斗定向基本原理與GPS相似,都是利用衛(wèi)星載波相位干涉測(cè)量原理來(lái)確定基線矢量在相應(yīng)坐標(biāo)系下表示[8]。
定位定向車(chē)北斗雙天線設(shè)置如圖5所示,后天線為主天線,中心指向前天線,后天線與前天線中心連線為基線,基線與定位定向車(chē)的縱軸平行。定位定向車(chē)后安裝有基準(zhǔn)面,基準(zhǔn)面法線方向與車(chē)軸方向平行,定位定向車(chē)進(jìn)行陣地勘測(cè)時(shí)可以利用基準(zhǔn)面快速將衛(wèi)星雙天線所確定的方位角引出,實(shí)現(xiàn)陣地勘測(cè)方位的快速引出測(cè)量。在北斗雙天線定向系統(tǒng)中,主天線除了與副天線進(jìn)行載波相位差分定向之外,還負(fù)責(zé)定位測(cè)速,定位定向車(chē)位置和速度信息都是基于主天線的[9]。

圖5 定位定向車(chē)北斗雙天線示意圖Fig.5 Schematic diagram of BD2 dual antenna of POV
3 組合導(dǎo)航
衛(wèi)星定位系統(tǒng)[10]定位和測(cè)速精度高,基本不受地域和時(shí)域限制。受載體機(jī)動(dòng)的影響較大,在復(fù)雜電磁環(huán)境下易受干擾和人為控制[11-12]。北斗衛(wèi)星要求收到4顆星以上才能導(dǎo)航,所以在城市、峽谷、森林等地區(qū),由于受遮擋衛(wèi)星信號(hào)衰減或失鎖,造成定位精度的下降甚至無(wú)法正常工作[13]。慣性導(dǎo)航系統(tǒng)能靠系統(tǒng)本身在全天候條件下,全球范圍內(nèi)自主地、隱蔽地提供多種較高精度的導(dǎo)航參數(shù),但其位置誤差隨時(shí)間累計(jì)[14]。衛(wèi)星和慣組組合導(dǎo)航綜合克服各自的缺點(diǎn),取長(zhǎng)補(bǔ)短,利用卡爾曼濾波融合方法使衛(wèi)星信息修正慣組信息,以保證較高的定位精度和定位連續(xù)性。
本文以定位定向車(chē)中慣性測(cè)量組合和北斗2差分測(cè)量設(shè)備為主進(jìn)行組合導(dǎo)航。定位定向車(chē)原工作方式為:導(dǎo)航信息處理器為數(shù)據(jù)信息處理器的中心單元,北斗2差分測(cè)量設(shè)備和慣性測(cè)量組合各自把定位信息數(shù)據(jù)傳到導(dǎo)航信息處理器,導(dǎo)航信息處理器中的導(dǎo)航軟件根據(jù)設(shè)置選擇采用哪個(gè)設(shè)備的數(shù)據(jù),北斗2差分測(cè)量設(shè)備和慣性測(cè)量組合各自單獨(dú)工作。導(dǎo)航信息處理器定時(shí)將北斗2差分測(cè)量移動(dòng)站發(fā)出的位置信息裝訂到慣性測(cè)量設(shè)備中,以校正慣組的位置基準(zhǔn)。慣性測(cè)量設(shè)備和北斗2差分測(cè)量設(shè)備之間沒(méi)有直接數(shù)據(jù)通信,也沒(méi)有通信接口。
在不更改定位定向車(chē)設(shè)備和硬件接口基礎(chǔ)上,導(dǎo)航信息處理器不顯示北斗2差分測(cè)量設(shè)備數(shù)據(jù),直接將其數(shù)據(jù)傳遞到慣性測(cè)量設(shè)備,慣性測(cè)量設(shè)備進(jìn)行組合導(dǎo)航計(jì)算后將組合導(dǎo)航數(shù)據(jù)傳遞給導(dǎo)航信息處理器,導(dǎo)航信息處理器直接采用組合導(dǎo)航后的數(shù)據(jù),提高陣地勘測(cè)導(dǎo)航的連續(xù)性,定位定向車(chē)組合導(dǎo)航更改設(shè)計(jì)如圖6所示。
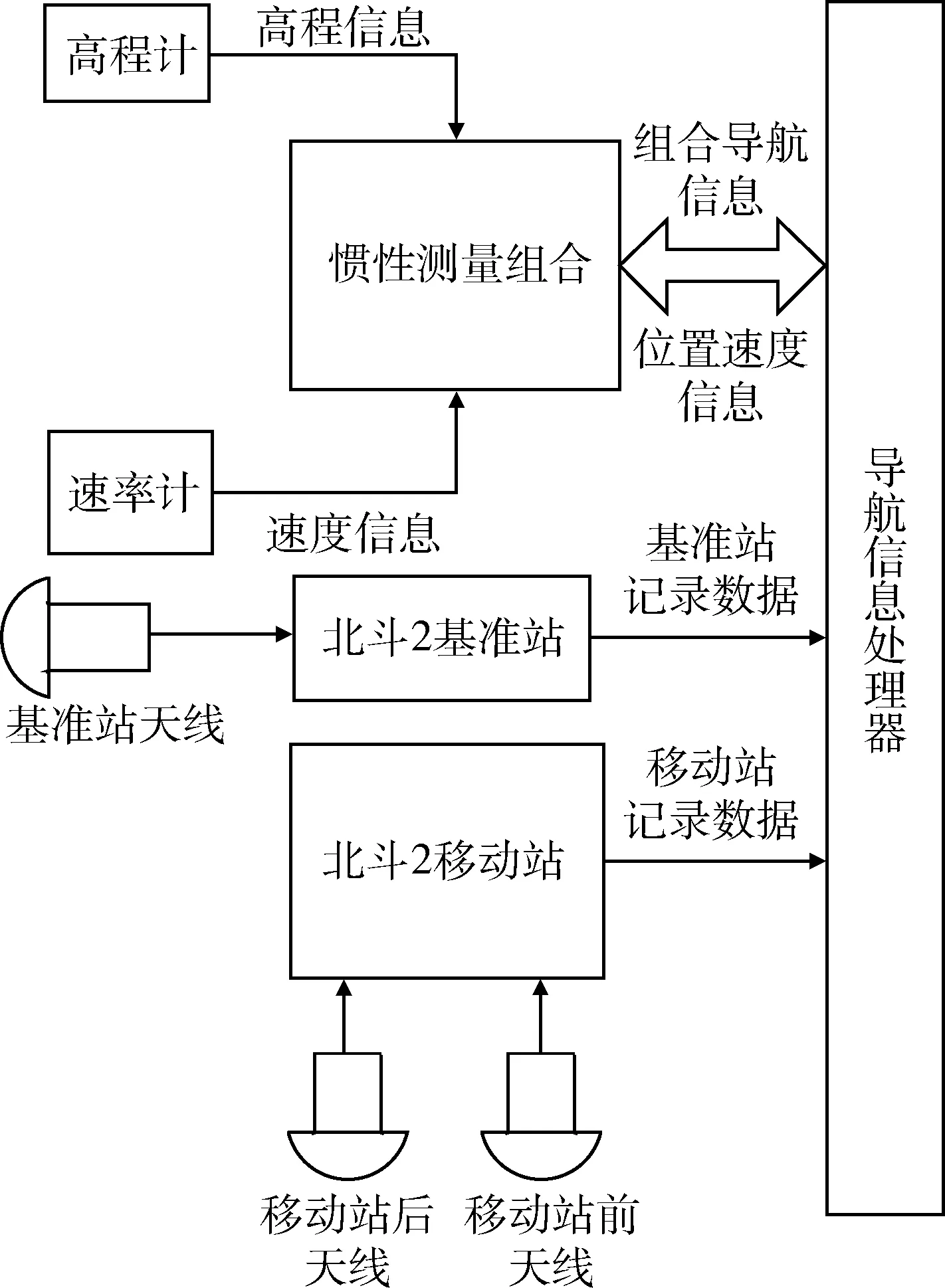
圖6 定位定向車(chē)組合導(dǎo)航工作示意圖Fig.6 Schematic diagram of the integrated navigation of POV
捷聯(lián)慣組和北斗2組合導(dǎo)航以兩者各自輸出測(cè)量的速度和位置為Kalman濾波器的觀測(cè)量,通過(guò)濾波對(duì)慣性測(cè)量設(shè)備的誤差和北斗2差分測(cè)量設(shè)備的誤差進(jìn)行最優(yōu)估計(jì)。系統(tǒng)的狀態(tài)方程為

(1)
慣性/北斗組合的綜合濾波器是一個(gè)12維的Kalaman濾波器,導(dǎo)航坐標(biāo)系選用東北天坐標(biāo)系。狀態(tài)變量X選取經(jīng)度、緯度、東向速度、北向速度、3個(gè)姿態(tài)角、陀螺儀的2個(gè)漂移和3個(gè)加速度計(jì)的零漂。
(2)
量測(cè)方程為

(3)
組合導(dǎo)航的觀測(cè)量選取位置和速度:位置觀測(cè)量,通過(guò)捷聯(lián)慣組系統(tǒng)與北斗2導(dǎo)航系統(tǒng)提供的位置信息的差值作為觀測(cè)量,位置信息主要是經(jīng)緯度信息。速度觀測(cè)量,通過(guò)捷聯(lián)慣組系統(tǒng)與北斗2導(dǎo)航系統(tǒng)提供的速度信息的差值作為觀測(cè)量。
捷聯(lián)慣組給出的位置信息:
(4)
北斗2接收機(jī)給出的位置信息:
(5)
式中:λ,L為位置的真值;NE,NN為衛(wèi)星沿東、北方向的位置誤差。
捷聯(lián)慣組給出的速度信息:
(6)
北斗2接收機(jī)給出的速度信息:
(7)
式中:vE,vN為速度的真值;δvE,δvN為慣性導(dǎo)航速度誤差;ME2,MN2為衛(wèi)星的測(cè)速誤差。
定義位置的量測(cè)方程:

(8)
定義速度測(cè)量方程:
(9)
最后得到位置和速度組合的量測(cè)方程:
(10)
組合導(dǎo)航軟件除了應(yīng)用Kalman濾波算法外還采用序貫處理技術(shù)、容錯(cuò)處理技術(shù)和時(shí)間同步技術(shù)等輔助手段,以保證濾波的穩(wěn)定性、正確性和可靠性。組合導(dǎo)航軟件是嵌入式實(shí)時(shí)軟件,在進(jìn)行導(dǎo)航解算、信息融合、故障檢測(cè)和導(dǎo)航功能控制的同時(shí),還要定時(shí)處理復(fù)雜的輸入和輸出。在滿足定位定向指標(biāo)需求的基礎(chǔ)上,做到程序內(nèi)容清晰,程序結(jié)構(gòu)嚴(yán)謹(jǐn),模塊獨(dú)立性強(qiáng),低耦合,高內(nèi)聚,以提高軟件的可靠性、可維護(hù)性、可移植性和可測(cè)試性,保證軟件的設(shè)計(jì)質(zhì)量。組合導(dǎo)航軟件包括控制管理模塊、捷聯(lián)解算模塊、組合導(dǎo)航模塊、數(shù)據(jù)I/O模塊,組合導(dǎo)航軟件框圖如圖7所示。

圖7 組合導(dǎo)航軟件示意框圖Fig.7 Flow chart of the integrated navigation software
4 陣地勘測(cè)
定位定向車(chē)總裝調(diào)試完后,在京西選擇了一段含有平坦開(kāi)闊的公路、林區(qū)和山路的跑車(chē)測(cè)試路線,總長(zhǎng)近30 km。在整條跑車(chē)勘測(cè)路線上設(shè)置8個(gè)基準(zhǔn)記錄點(diǎn),分別對(duì)單北斗導(dǎo)航和組合導(dǎo)航2種方式進(jìn)行跑車(chē)勘測(cè)測(cè)試,行駛最大時(shí)速40 km,每種導(dǎo)航方式分別進(jìn)行6遍跑車(chē)勘測(cè)[15],以真實(shí)實(shí)際情況對(duì)比對(duì)2種導(dǎo)航方式,驗(yàn)證組合導(dǎo)航對(duì)定位定向車(chē)陣地勘測(cè)導(dǎo)航帶來(lái)的改進(jìn),分別記錄每種定位模式下在基準(zhǔn)點(diǎn)的的跑車(chē)數(shù)據(jù),對(duì)記錄數(shù)據(jù)與8個(gè)基準(zhǔn)測(cè)量點(diǎn)進(jìn)行數(shù)據(jù)分析,分析結(jié)果如圖8,9所示。
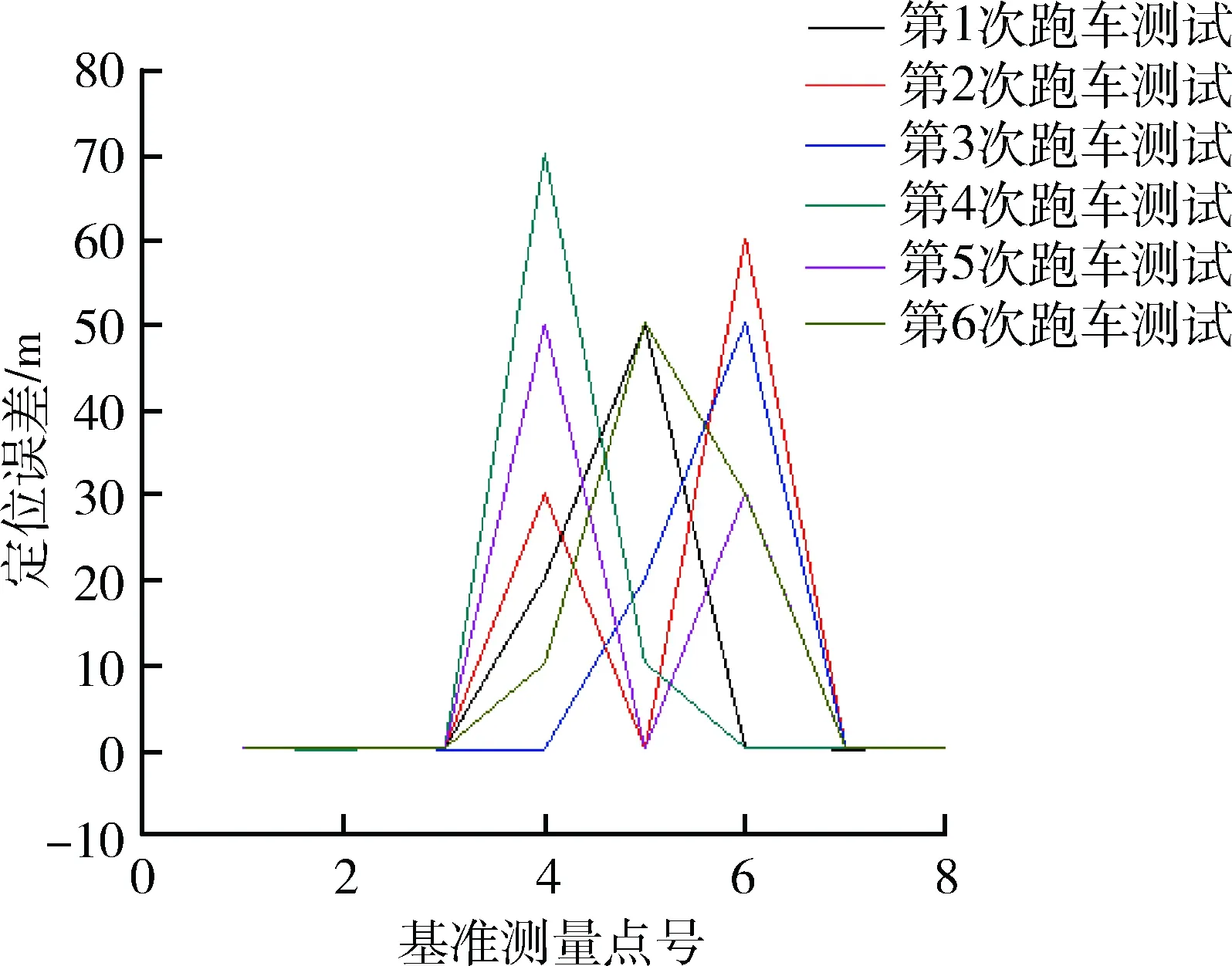
圖8 北斗導(dǎo)航測(cè)試數(shù)據(jù)Fig.8 Test data of BD navigation
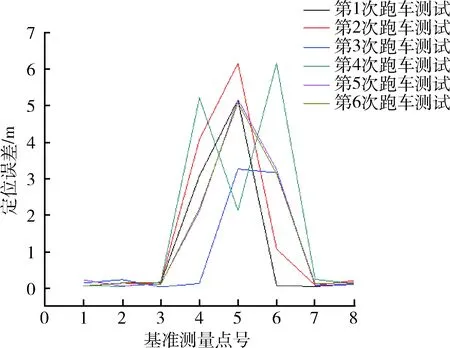
圖9 組合導(dǎo)航測(cè)試數(shù)據(jù)Fig.9 Test data of integrated navigation
通過(guò)圖8,9的數(shù)據(jù)發(fā)現(xiàn),單北斗導(dǎo)航模式下定位定向車(chē)在開(kāi)到4,5,6點(diǎn)處時(shí),衛(wèi)星接收數(shù)據(jù)出現(xiàn)重大偏移,與基準(zhǔn)點(diǎn)數(shù)據(jù)偏差較大,在該區(qū)域衛(wèi)星信號(hào)遮擋干擾較為嚴(yán)重,這種狀態(tài)下定位定向車(chē)陣地勘測(cè)數(shù)據(jù)出現(xiàn)較大偏差;組合導(dǎo)航模式下,定位定向車(chē)在開(kāi)到4,5,6點(diǎn)處時(shí),數(shù)據(jù)也出現(xiàn)偏差,與基準(zhǔn)點(diǎn)相比,偏差在6 m以內(nèi),比北斗10 m定位精度稍有改善,驗(yàn)證了定位定向車(chē)在組合導(dǎo)航模式下,經(jīng)過(guò)衛(wèi)星信號(hào)受遮擋干擾的區(qū)域時(shí),勘測(cè)數(shù)據(jù)精度滿足要求。
5 結(jié)束語(yǔ)
本文通過(guò)在原定位定向車(chē)捷聯(lián)慣組和北斗2衛(wèi)星導(dǎo)航設(shè)備基礎(chǔ)上,根據(jù)底盤(pán)狀態(tài)設(shè)計(jì)速率采集方式,引入了基于位置和速度的卡爾曼濾波算法,通過(guò)跑車(chē)勘測(cè)試驗(yàn)驗(yàn)證組合導(dǎo)航有效的提高了定位定向車(chē)陣地勘測(cè)的環(huán)境適應(yīng)性,在有衛(wèi)星信號(hào)遮擋的區(qū)域能順利完成陣地勘測(cè)。引入北斗雙天線定向提供快速方位基準(zhǔn),提高了定位定向車(chē)陣地勘測(cè)方位引出的快速性。該設(shè)計(jì)對(duì)定位定向車(chē)有較大應(yīng)用價(jià)值,基本實(shí)現(xiàn)全區(qū)域的無(wú)縫定位導(dǎo)航陣地勘測(cè)。
[1] 萬(wàn)家寧,王剛,王磊.數(shù)據(jù)融合在陣地勘測(cè)中的應(yīng)用[J].計(jì)算機(jī)仿真,2008,25(11):18-20. WAN Jia-ning,WANG Gang,WANG Lei.Application of Data Fusion in Battlefield Reconnaissance[J].Computer Simulation,2008,25(11):18-20.
[2] 李國(guó)宏,曾番,夏偉鵬.基于AHP法的地形聯(lián)測(cè)車(chē)作戰(zhàn)效能評(píng)價(jià)[J].戰(zhàn)術(shù)導(dǎo)彈技術(shù),2010(6):56-69. LI Guo-hong,ZENG Fan,XIA Wei-peng.Operational Efficiency Evaluation of Landform Survey Vehicle Based on VHP[J].Tactical Missile Technology,2010(6):56-69.
[3] 康紅霞,李國(guó)宏,曾番.4D產(chǎn)品在地型聯(lián)測(cè)中的應(yīng)用探討[J].彈箭與制導(dǎo)學(xué),2010,30(6):193-194. KANG Hong-xia,LI Guo-hong,ZENG Fan.On Appliaction of 4D Products of Surveying and Mapping in Toporgraphic Surveying Vehicle[J].Journal of Projectiles,Rockets,Missiles and Guidance,2010,30(6):193-194.
[4] 李國(guó)宏,楊建軍,韓小斌.地形聯(lián)測(cè)車(chē)技術(shù)升級(jí)問(wèn)題分析[J].彈箭與制導(dǎo)學(xué)報(bào),2007,27(5):220-222. LI Guo-hong,YANG Jian-jun,HAN Xiao-bin.The Analysis of the Technique Upgrade Question about the Landform-Survey-Vehicle[J].Journal of Projectiles,Rockets,Missiles and Guidance,2007,27(5):220-220.
[5] 泰永元.慣性導(dǎo)航[M].北京:科學(xué)出版社,2006:327-331. TAI Yong-yuan.The Inertial Navigate[M].Beijing:Science Press,2006:327-331.
[6] 嚴(yán)恭敏.車(chē)載自主定位定向系統(tǒng)研究[D].西安:西北工業(yè)大學(xué),2006. YAN Gong-min.Research on the System of Vehicle Position and Azimuth Determining[D].Xi’an:Northwestern Polytechnical University,2006.
[7] 夏德安,朱宏.北斗衛(wèi)星導(dǎo)航定位系統(tǒng)在防空兵種的應(yīng)用[J].軍事天地,2007,26(4):115-117. XIA De-an,ZHU Hong.The Application of the Beidou Navigation System in Antiair Soldier [J].Military World,2007,26(4):115-117.
[8] 張曉安,逯亮清,楊彪.應(yīng)用延長(zhǎng)基線法實(shí)現(xiàn)北斗雙星的快速定向[J].光學(xué)精密工程,2010,18(11):2462-2464. ZHANG Xiao-an,LU Liang-qing,YANG Biao.Fast Oriertation of Beidou Bi-Satellite by Extending Baseline[J].Optics and Precision Engineering,2010,18(11):2462-2464.
[9] 逯亮清,張曉安,吳美平.基于速度輔助的車(chē)載定向模糊度動(dòng)態(tài)確定方法[J].中國(guó)慣性技術(shù)學(xué)報(bào),2009,17(6):684-685. LU Liang-qing,ZHANG Xiao-an,WU Mei-ping.Method of Dynamic Ambiguity Determination of Vehicle Orienting by Satellite Based on Velocity Aids[J].Journal of Chinese Intertial Technology,2009,17(6):684-685.
[10] 泰永元,張洪鉞,汪叔華.卡爾曼濾波與組合導(dǎo)航原理[M].西安:西北工業(yè)大學(xué)出版社,2004. TAI Yong-yuan,ZHANG Hong-yue,WANG Shu-hua.The Theory of Kalaman Filter and Intergrated Navigation[M].Xi’an:Northwestern Polytechnical University Press,2004.
[11] CHANG Kai-wei,HUANG Yun-wen.An Intelligent Navigator for Seamless INS/GPS Integrated Land Vehicle Navigation Applications[J].Applied Soft Computing,2008,8(1):722-733.
[12] HIDE C,MOORE T,SMITH M.Adaptive Kalman Filtering Algorithms for Integrating GPS and INS[J].Position Location and Navigation Symposium,2004,4(5):227-233.
[13] GREWAL M S,WEILL L R,ANDREWS A P.Global Positioning Systems,Inertial Navigation and Integration[M].New York:Wiley Interscience,2007.
[14] 金偉.慣性/天文/衛(wèi)星組合導(dǎo)航技術(shù)[M].北京:國(guó)防工業(yè)出版社,2011. JIN Wei.INS/CNS/GNSS Integrated Navigation Technology[M].Beijing:National Defense Industry Press,2011.
Application Design of Vehicle Integrated Navigation in Battlefield Reconnaissance
LIU Jian,XU You-zhe,JIA Jun-qiang
(Beijing Institute of Electronic System Engineering,Beijing 100854,China)
In order to improve the continuity, accuracy and rapidity of the battlefield reconnaissance, and to increase the battlefield reconnaissance environmental adaptability of position and orientation vehicle (POV), the Kalman filtering algorithm is for the first time used for data fusion in the integrated navigation in the battlefield reconnaissance of the POV with comprehensive characteristics of each device such as BD2(BeiDou 2), SINS,speedometer and altimeter. The experimental results show that the design effectively improves the environmental adaptability of the battlefield reconnaissance of the POV, and a high position accuracy, continuity and basically seamless navigation positioning in the whole region is achieved.
BD2;SINS;speedometer;altimeter;combined navigation;battlefield reconnaissance
2016-06-15;
2016-11-18
有
劉建(1986-),男,山東青島人。工程師,碩士,研究方向?yàn)槎ㄎ欢ㄏ蚩傮w設(shè)計(jì)。
通信地址:100854 北京142信箱30分箱17號(hào) E-mail:jidaliujian2008@163.com
10.3969/j.issn.1009-086x.2017.03.007
V249.32+8
A
1009-086X(2017)-03-0040-06
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級(jí)版)(2015年4期)2015-04-29 00:00:00
