單星衛(wèi)星通信終端定位技術(shù)研究
2017-06-27 08:14:18李立峰
無線電通信技術(shù) 2017年4期
關(guān)鍵詞:卡爾曼濾波
李立峰,江 漫,陳 兵
(1.裝備工程技術(shù)研究實(shí)驗(yàn)室,河北 石家莊050081;2.中國電子科技集團(tuán)公司第五十四研究所,河北 石家莊 050081)
單星衛(wèi)星通信終端定位技術(shù)研究
李立峰1,2,江 漫1,2,陳 兵1,2
(1.裝備工程技術(shù)研究實(shí)驗(yàn)室,河北 石家莊050081;2.中國電子科技集團(tuán)公司第五十四研究所,河北 石家莊 050081)
針對(duì)傳統(tǒng)的雙星或三星定位技術(shù)主要應(yīng)用于地面固定站,需要存在重疊的主鄰星波束覆蓋范圍,必須有匹配的鄰星等局限,提出了單星定位技術(shù),主要對(duì)無匹配鄰星以及處在點(diǎn)波束內(nèi)的目標(biāo)進(jìn)行定位。將觀測(cè)平臺(tái)抵近目標(biāo)波束,同時(shí)接收目標(biāo)上行旁瓣信號(hào)和衛(wèi)星下行信號(hào),利用方向信息和時(shí)差信息,解算目標(biāo)位置,將結(jié)果進(jìn)行擴(kuò)展卡爾曼非線性濾波,實(shí)現(xiàn)對(duì)衛(wèi)星通信終端的定位。仿真結(jié)果表明,該算法大大提升了測(cè)向/時(shí)差聯(lián)合定位的精度。
方向信息;時(shí)差;衛(wèi)星通信終端定位;擴(kuò)展卡爾曼濾波
0 引言
測(cè)向/時(shí)差聯(lián)合定位[1]算法是一種利用來波信號(hào)的方向信息和時(shí)差信息的無源定位方法,兼具單純測(cè)向定位[2-3]體制的成本低和時(shí)差定位[4]體制的定位精度高等優(yōu)點(diǎn),在多站無源定位中得到廣泛應(yīng)用。文獻(xiàn)[5]中,雖然針對(duì)雙站測(cè)向/時(shí)差聯(lián)合定位算法進(jìn)行了詳細(xì)推導(dǎo),但是定位目標(biāo)只限定在了地球表面,對(duì)于有一定高度的目標(biāo),卻無能為力。
傳統(tǒng)的雙星[6-7]或三星定位技術(shù)[8-9]對(duì)地面目標(biāo)進(jìn)行定位時(shí),需要有可以匹配的鄰星,存在重疊的波束覆蓋范圍,對(duì)于無匹配鄰星以及處在點(diǎn)波束內(nèi)的目標(biāo),雙星或三星定位技術(shù)則表現(xiàn)出其局限性。
因此在測(cè)向與時(shí)差聯(lián)合定位算法的基礎(chǔ)上,結(jié)合單平臺(tái)對(duì)通信衛(wèi)星終端的定位的應(yīng)用背景,針對(duì)單星衛(wèi)星通信終端,提出了基于測(cè)向和時(shí)差測(cè)量參數(shù)的擴(kuò)展卡爾曼三維濾波算法,通過公式推導(dǎo)和算法仿真,驗(yàn)證了算法的性能,能夠利用方向信息和時(shí)差信息實(shí)現(xiàn)對(duì)衛(wèi)星通信終端的定位。
1 定位原理
測(cè)向/時(shí)差聯(lián)合定位系統(tǒng)模型由一個(gè)地面觀測(cè)站(包括接收天線、場(chǎng)放、射頻前端、數(shù)字處理接收機(jī)等組成)和通信衛(wèi)星構(gòu)成。地面觀測(cè)站配備2副天線,其中一副天線接收目標(biāo)輻射源的直射波上行信號(hào),并測(cè)得來波信號(hào)的方位角β和俯仰角ε,而另一副天線主瓣對(duì)準(zhǔn)目標(biāo)衛(wèi)星,接收衛(wèi)星的下行信號(hào),通過上行信號(hào)和下行信號(hào)可以測(cè)得時(shí)間差Δt。從幾何意義上說,求解目標(biāo)輻射源位置的過程即求解3個(gè)曲面(由β確定的射平面、ε確定的射平面、由Δt確定的雙曲面)交點(diǎn)的過程[10-11]。
現(xiàn)就定位模型進(jìn)行分析,定位模型如圖2所示。
其中,觀測(cè)站觀測(cè)到的目標(biāo)的方位角為β,俯仰角為ε,真正的時(shí)差Δt=(衛(wèi)星上行信號(hào)+衛(wèi)星下行信號(hào)-目標(biāo)上行信號(hào))/光速。
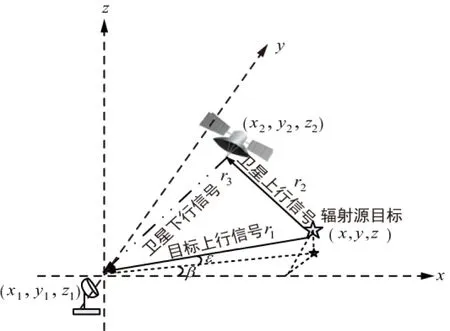
圖1 單星衛(wèi)星通信終端定位模型示意圖
方位角β、俯仰角ε和時(shí)間差Δt組成的3個(gè)定位面構(gòu)成的3個(gè)方程如下:
① 方位角方程:

(1)
② 俯仰角方程:

(2)
③ 時(shí)差方程:
r2+r3-r1=cΔt。
(3)
由于觀測(cè)站和衛(wèi)星的坐標(biāo)均已知,所以r3可以認(rèn)為是已知的,所以式(1)、式(2)和式(3)可以合并如下:
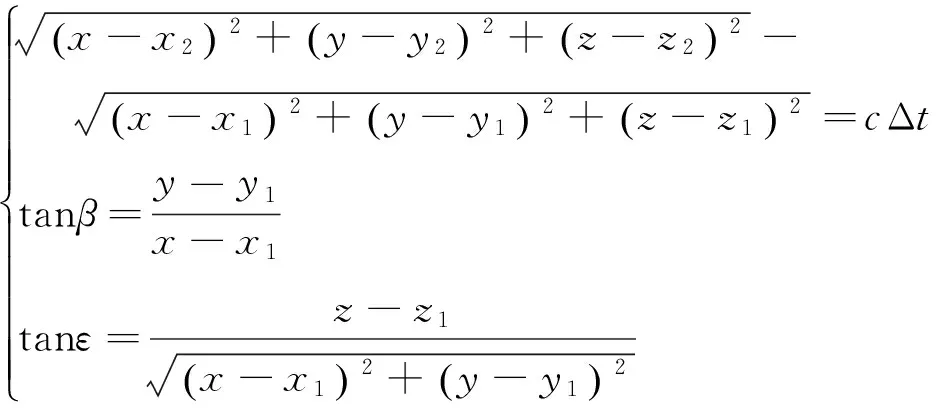
(4)
對(duì)輻射源目標(biāo)進(jìn)行定位的過程就是解上述非線性方程的過程,解此類非線性方程一般應(yīng)用Chan算法。
2 基于Chan算法的時(shí)差/方位聯(lián)合定位解算算法
Chan算法[14]是一種基于TDOA[15]的技術(shù),具有解析表達(dá)式解的雙曲線非線性化定位算法。該算法最大的特點(diǎn)就是算法復(fù)雜度比較低,可以歸納為以下3點(diǎn):① Chan算法不需要計(jì)算初始值;② 該算法是在時(shí)差測(cè)量數(shù)據(jù)誤差比較小、且零均值服從高斯分布噪聲的情況下進(jìn)行的,定位精度可以達(dá)到克拉美羅的下限值;③ 運(yùn)算過程中只需要進(jìn)行2次迭代就可以求得最終的結(jié)果。
本文也用Chan算法解非線性方程(4)。
先對(duì)式(4)進(jìn)行線性化處理得:
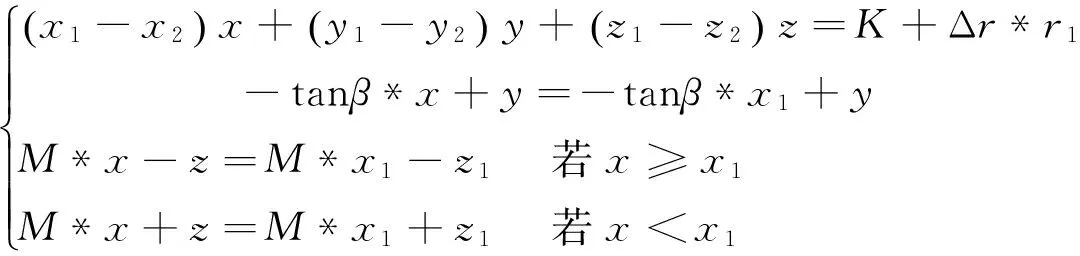
(5)
其中:

若x≥x1,從而定位方程為:

(6)
式中,x、y、z、r1分別為未知數(shù),為了求解該線性方程組,則先將r1看作已知變量,因此可以將式(6)寫成如下的矩陣表達(dá)式:

(7)
上式可寫為:
AX=F。
(8)

(9)
如文獻(xiàn)[4]所述,可以令:

(10)
式(9)可以整理為如下:
(11)
其中:
將式(11)代入式(12)可得到式(13):

(12)
ar12+2br1+c=0,
(13)
式中,a=R2+N2+H2-1,b=RP+NQ+HI-Δr,c=P2+Q2+I2-Δr2。
式(13)為一元二次方程,對(duì)其進(jìn)行求解可得出目標(biāo)輻射源到觀測(cè)站的距離r1為:

(14)
將式(14)代入式(11) 就可以求解出目標(biāo)的位置,作為牛頓迭代法的迭代初始值。該位置與目標(biāo)的精確位置相差不大,代入牛頓迭代方程可以得到目標(biāo)的精確值。迭代過程這里不再詳述。
求得結(jié)果有2個(gè)值,可以通過定位區(qū)域排除虛假定位點(diǎn)。另外,觀測(cè)方程是嚴(yán)重非線性的方程,這導(dǎo)致解算出來的結(jié)果精度受限,因此獲得更高的定位精度,必須對(duì)定位結(jié)果進(jìn)行非線性濾波處理。
3 對(duì)定位結(jié)果的非線性濾波
為了提高定位精度,必須對(duì)狀態(tài)序列進(jìn)行濾波處理[16]。目前常用的濾波是卡爾曼[17]和擴(kuò)展卡爾曼濾波[18]算法,由于單站無源定位系統(tǒng)的觀測(cè)方程均是嚴(yán)重非線性的方程,因此卡爾曼濾波算法就具有了一定的局限性[19-20],所以本文選擇擴(kuò)展卡爾曼濾波算法。
根據(jù)式(4)的方程,建立基于擴(kuò)展卡爾曼濾波的測(cè)向/時(shí)差聯(lián)合定位模型如下:
預(yù)測(cè)方程:Xk=Φk/k-1Xk-1+wk-1。
這里本文只討論固定目標(biāo),所以Φk/k-1為3*3的單位陣,wk-1為擾動(dòng)噪聲。



其中:


濾波方程:


4 仿真實(shí)驗(yàn)
仿真環(huán)境設(shè)計(jì):地面觀測(cè)站的位置坐標(biāo)為(120°E,35°N 300m),通信衛(wèi)星的位置坐標(biāo)為(114°E,22°N,360 000 km),目標(biāo)輻射源的位置坐標(biāo)為(114°E,38°N,500 m),站址誤差10 m,時(shí)差測(cè)量誤差100 ns,測(cè)向誤差0.5°。采用100次蒙塔卡羅試驗(yàn),每次1 000次定位數(shù)據(jù)采集,定位間隔1 s。定位結(jié)果如圖2所示。
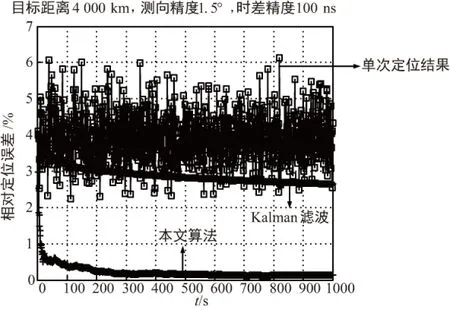
圖2 定位結(jié)果仿真
由圖2可以看出,測(cè)向/時(shí)差聯(lián)合定位的單次定位結(jié)果精度大致在4%R左右,基于單次定位結(jié)果的卡爾曼濾波算法的定位精度收斂到2.7%R,而基于參數(shù)測(cè)量的 EKF 濾波算法的最終定位精度可達(dá)0.5%R。仿真結(jié)果表明,本算法大大提升了測(cè)向/時(shí)差聯(lián)合定位的精度且能夠利用測(cè)向信息和時(shí)差信息聯(lián)合解算出目標(biāo)的位置信息。
5 結(jié)束語
基于單個(gè)觀測(cè)平臺(tái),利用測(cè)向信息和時(shí)差信息,建立了定位的三維模型,突破了傳統(tǒng)的雙星或三星定位技術(shù)中需要存在重疊的主鄰星波束覆蓋范圍或必須有匹配鄰星以及處在點(diǎn)波束內(nèi)的目標(biāo)定位問題,推導(dǎo)基于測(cè)向/時(shí)差參數(shù)的擴(kuò)展卡爾曼濾波算法,并進(jìn)行了計(jì)算機(jī)仿真。仿真結(jié)果表明,基于擴(kuò)展卡爾曼算法的測(cè)向/時(shí)差定位算法是一種收斂速度快、定位精度高的無源定位算法。
本算法已經(jīng)在工程中得到應(yīng)用,經(jīng)實(shí)際驗(yàn)證表明,在獲得較為準(zhǔn)確的衛(wèi)星星歷的前提下,可以達(dá)到比較精確的定位效果。
[1] 劉建林.多站無源定位技術(shù)研究與應(yīng)用[D] .西安:西安電子科技大學(xué),2011:25-35.
[2] 徐濟(jì)仁.測(cè)向定位中若干問題的探討[J].無線電工程, 2001(S1):122-124.
[3] 徐敬祥.測(cè)向定位算法研究及測(cè)向定位系統(tǒng)軟件設(shè)計(jì) [D].成都:電子科技大學(xué),2016:5-39.
[4] 邢翠柳,陳建民.多站無源時(shí)差定位精度分析[J].無線電工程,2012,42(2):32-48.
[5] 李仕云.基于EKF 的雙站測(cè)向/時(shí)差聯(lián)合定位算法[J].無線電工程,2015,41(1):38-40.
[6] 劉春茂,陳鋒,邱丙益.基于差分TDOA/FDOA的雙星定位技術(shù)研究[J].通信對(duì)抗,2015,34(3):6-9.
[7] 李盛.雙星無源定位系統(tǒng)相關(guān)技術(shù)研究[D].成都:電子科技大學(xué),2005:7-18.
[8] 李紅姝.時(shí)差估計(jì)及三星定位算法研究[D].哈爾濱:哈爾濱工業(yè)大學(xué),2011.
[9] Haworth D P,Smith N G,Bardelli R,et al.Interference Localization for EUTELSAT Satellites:The First European Transmitter Location System [J].International Journal of Satellite Communications,1997,15(4):155-183.
[10]狄慧.單/雙星無源定位關(guān)鍵技術(shù)研究[D].南京:南京航空航天大學(xué),2014.
[11]劉嘉佳.無線電測(cè)向定位算法的研究及其應(yīng)用[D].成都:四川大學(xué),2004:19-38.
[12]周海鶯,祝春萌,黃錦淵.衛(wèi)星星歷及廣州氣象衛(wèi)星地面站相關(guān)數(shù)據(jù)分析[J].氣象水文海洋儀器,2010(1):60-63.
[13]李曉東.削弱衛(wèi)星星歷誤差對(duì)定位精度影響的方法探討[J].淮海工學(xué)院學(xué)報(bào),2009,18(S1):52-55.
[14]Chan Y T,Ho K C.A Simple and Efficient Estimator for Hyperbolic Location[J].IEEE Transactions on Signal Processing,1994,42(8):1905-1915.
[15]馬福和,張 敏,郭福成.運(yùn)動(dòng)單站短基線時(shí)差定位方法[J].航天電子對(duì)抗,2016,32(3):4-8.
[16]劉學(xué).機(jī)載無源定位技術(shù)與跟蹤算法研究[D].哈爾濱:哈爾濱工業(yè)大學(xué),2011:7-9.
[17]Kalman R E.A New Approach to Linear Filtering and Prediction Problems[J].Transaction of the ASME,Joumal of Basic Engineering,1960,82(l):35-45.
[18]靳展.單站無源定位算法[D].哈爾濱:哈爾濱工程大學(xué),2009:18-36.
[19]李炳榮.擴(kuò)展卡爾曼濾波在無源定位中的應(yīng)用研究[J].中國電子科學(xué)研究院學(xué)報(bào),2011(6):622-625.
[20]邱鳳云.Kalman濾波理論及其在通信與信號(hào)處理中的應(yīng)用[D].濟(jì)南:山東大學(xué),2009:6-14.
Satellite Communication Terminal Location Technology Research Based on Single Satellite
LI Li-feng1,2,JIANG Man1,2,CHEN Bing1,2
(1.Equipment Engineering Technology Research Laboratory,Shijiazhuang Hebei 050081,China;2.The 54th Research Institute of CETC,Shijiazhuang Hebei 050081,China)
Traditional dual-satellite and triple-satellite location technology is usually used for ground fixed station location,which requires overlapped beam coverage area from main satellite and neighboring satellite. And a matched neighboring star is needed. To mitigate this limitation,a solution of single satellite positioning is proposed to solve the problem which no neighboring satellite exist or the target is contained in spot beam. By approaching into the target’s beam,observation platform firstly utilizes directional information and TDOA information from the
upward sidelobe signal and downward signals of satellite,and calculates the position information of the target,and then combines with EKF nonlinear filtering to locate the target. Finally,computer simulation indicates that DOA/TDOA joint location algorithm can improve location accuracy greatly.
Directional Information;TDOA;Satellite Communication Terminal Location;EKF nonlinear filtering;
10.3969/j.issn.1003-3114.2017.04.17
李立峰,江漫,陳兵.單星衛(wèi)星通信終端定位技術(shù)研究 [J].無線電通信技術(shù),2017,43(4):71-74.
[LI Lifeng,JIANG Man,CHEN Bing.Satellite Communication Terminal Location Technology Research Based on Single Satellite [J]. Radio Communications Technology,2017,43(4):71-74. ]
2017-03-15
李立峰(1977—),男,高級(jí)工程師,主要研究方向:數(shù)字波束形成、測(cè)向、盲信號(hào)分離等。江 漫(1988—),女,工程師,主要研究方向:數(shù)字信號(hào)處理等。
TN911.2
A
1003-3114(2017)04-71-4
猜你喜歡
測(cè)控技術(shù)(2018年11期)2018-12-07 05:49:38
測(cè)控技術(shù)(2018年12期)2018-11-25 09:37:34
電測(cè)與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學(xué)學(xué)報(bào)(2017年9期)2017-12-18 07:12:25
中國慣性技術(shù)學(xué)報(bào)(2017年1期)2017-06-09 08:15:14
電測(cè)與儀表(2016年21期)2016-04-11 12:42:44
電源技術(shù)(2016年9期)2016-02-27 09:05:39
江蘇科技大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年4期)2015-12-17 12:42:50
電源技術(shù)(2015年1期)2015-08-22 11:16:28
電測(cè)與儀表(2015年24期)2015-04-09 12:04:36