無尾鴨式布局無人機穩定特性研究
2017-06-27 00:23:46張喆尤俊彬華藝欣
科技創新與應用 2017年18期
關鍵詞:研究
張喆 尤俊彬 華藝欣
摘 要:針對一種新的飛翼式氣動布局無人機,設計了一種常規構型的飛行控制律。在飛行試驗中,發現飛機橫向穩定特性較差,為了弄清這一問題出現的原因,并改進控制律,充分分析仿真計算與真實飛行一些細微差別的基礎上,設計了一種基于線性調頻Z變換的數據處理方法,該方法可在飛行試驗中對各軸的穩定特性進行有效的評估。通過大量試驗數據的分析處理,得出了橫向穩定性差是由于橫向回路增益參數設計不合理引起的結論,在該結論指導下對控制律進行調參,在后續試飛中取得良好的效果。
關鍵詞:飛翼;穩定性;研究
1 概述
隨著近年來我國航空技術的發展,小型飛翼式布局無人機得到了越來越廣泛的應用。該布局的主要優點是:
低Radar-Cross Section(雷達散射截面積,簡稱RCS)特性,可在試飛工作中作為低隱身特性飛機作為目標機,開展雷達系統試驗;良好的升阻特性,在結構設計方面可減輕全機重量,提升任務載荷重量。
無尾鴨式布局是一種改良飛翼氣動布局形式,配有鴨翼以進一步提高飛機升阻特性。由于取消了平尾,而翼尖垂尾距重心的力臂較短,故縱向與航向的本體穩定特性低于常規布局飛機,這給飛控系統的設計工作帶來挑戰。
由于該氣動布局飛機的本體穩定性較差,需要利用自動飛控系統進行增穩控制。才能使飛機在空中正常的飛行。因此,在飛行試驗中,對設計的飛控系統進行穩定性分析,對于控制律的改進和飛控系統評定具有重要意義。這種試驗最早是在NASA的開展的,并在多種驗證機的試飛工作中得到應用。包括:X-36驗證機[1]、X-38驗證機[2]、X45、X48等飛翼式布局無人驗證機等[3][4]。
在國內,北京航空航天大學王立新、李林、馬超、李淼[5]-[10]等人對飛翼布局飛機的穩定特性、飛行品質、控制器設計方法等進行了廣泛深入的研究,給出了飛翼布局飛機增穩控制的理論方法。本文在這些研究成果的基礎上,設計了一種計算機仿真計算方法,這種方法可對飛翼布局飛機在飛行試驗中的穩定性進行評估,給出定量的結果。達到了國外航空強國的同等技術水平。
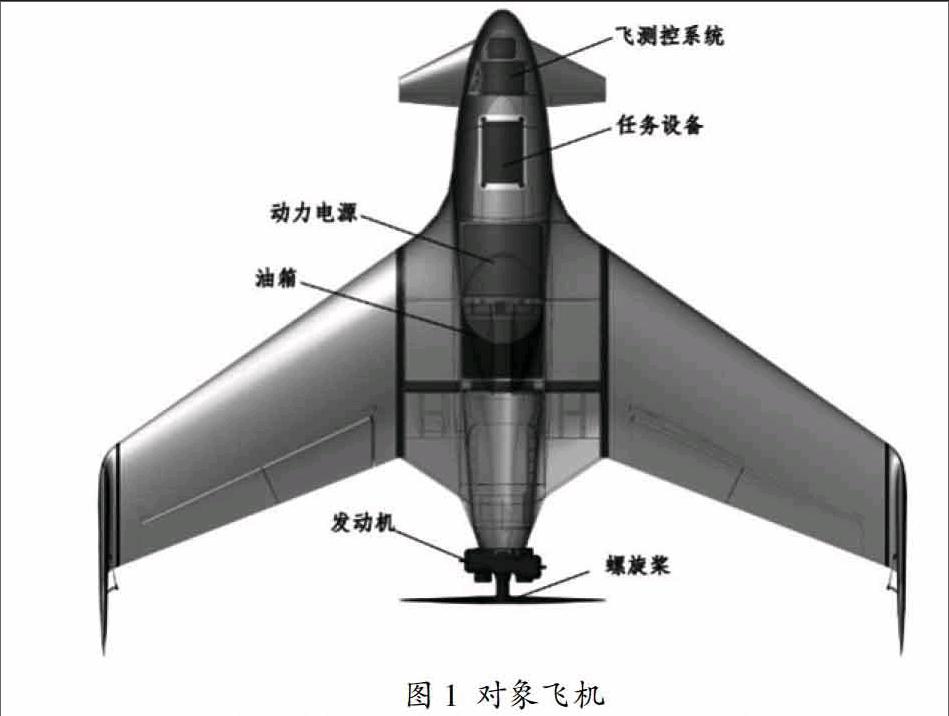
2 研究對象
對象飛機如圖1所示。為一種典型的無尾鴨式布局無人機,采用中等展弦比的飛翼式布局,機身前方配有小型鴨翼。發動機安裝在機身尾部,采用后推式動力。
該機有2組飛行控制面,包括升降副翼、方向舵。其中,當升降副翼同向偏轉時,可進行俯仰方向控制飛機本體,當差動時,可進行滾轉方向控制。針對該構型本體動力學特點,結合實際飛行中的任務要求,設計了一種基于經典控制理論的飛行控制律。
在控制律調參時,參照有人駕駛飛機飛行品質規范MIL-STD-1797A的要求,為該機設計了期望的品質參數以供控制律調參使用。如表1和表2所示。表1給出了巡航狀態(空速Va=27m/s,高度2000m)的縱向回路設計結果,表2給出了橫航向回路設計結果。
仿真研究發現,前述控制律的穩定性、快速響應特性均有良好的效果,可以快速消除擾動,且超調量較小。
飛行試驗驗證在一個空域較為有限的小型機場進行。該機場為山區機場,跑道兩側均為狹長山脈,常年氣流擾動情況復雜。在試飛當天,有較強的大氣紊流活動,最大風速大于9m/s。該無人機在飛行試驗時的航跡如圖2所示。飛機進行順時針飛行。由于大氣擾動的影響,在盤旋飛行時,每圈的飛行航跡沒有完全重合。
圖3為穩定平飛時的縱向響應曲線,由該圖可以看出,縱向穩定性較好,在較強的氣流擾動作用下(迎角變化劇烈),俯仰角變化范圍為0.7°至3.3°。
圖4為橫向響應,從曲線可以看出,橫向穩定性較差,滾轉角持續性振蕩,振蕩幅值為+5°至-7°,需要改進控制律解決該問題。
3 問題分析及改進方法
3.1 問題分析
對該無人機的飛控系統穩定進行分析。如圖5所示。
其中作動器模型為如圖6。
圖7、圖8為滾轉軸、俯仰軸的頻響特性。
在從數據處理結果可以看出,滾轉軸、俯仰軸的穩定裕度均滿足幅值裕度6dB、相位裕度45°的要求。
進一步分析,仿真時作動器、傳感器模型是基于線性模型的。認為滾轉軸在仿真時穩定性滿足要求,在實際飛行中穩定性不足的原因是:傳感器、作動器等飛控系統設備的動態響應模型與真實情況中差異性很大,造成仿真分析的結果可信性不足。
3.2 解決問題的方法
為解決無人機在實際飛行中滾轉軸穩定性不足,在強氣流擾動下振蕩幅值較大的問題,應在飛行中對該無人機的閉環系統穩定性進行試驗,為控制律調參提供依據。
為得到各軸準確的頻響特性細心,應進行頻域辨識。完整的頻域辨識流程如圖9所示。試驗數據經過多變量譜分析和規整后得到頻率響應矩陣,由該矩陣即可對選定的輸入/輸出對辨識其傳遞函數模型。
本文主要采用線性調頻Z變換技術(簡稱CZT變換)將時間歷程數據轉換成頻率響應序列,當輸入、輸出的頻率響應確定后,進一步得到系統的伯德圖。
CZT能在單位圓弧上以很高的精度確定頻率響應,具有高度的靈活性,尤其適合于從飛行試驗數據中辨識頻率響應。CZT具有以下特點:(1)CZT中,頻率點的數量N可以獨立于時間歷程數據點數L而單獨選取,僅需滿足條件N?燮L且N+L是2的整數冪次方。CZT相對于FFT需要的條件寬松得多,一般程序中(包括MATLAB),FFT要求N=L,并且N和L都是2的整數冪次方。(2)CZT的N個頻率點可以分布在單位圓的任意弧段上(這就是說,可以僅分布在感興趣的頻段),而不是像FFT一樣分布在整個單位圓頻率范圍。以50赫茲采樣率采集的20.48秒時間歷程數據為例,窗口寬為L=1024(Twin=20.48s)。FFT得到的頻率響應為均勻頻率分辨率△f=1/20.48=0.0488Hz。頻率響應包含N/2=1024/2=512個頻率點,從fmin=1/20.48=0.0488Hz到fmax=fs/2=50/2=25Hz均勻分布。然而,典型情況下操縱品質分析應用中感興趣的頻率范圍(以及合適激勵信號的頻率范圍)是0.3-12rad/s(即0.0478-1.910Hz),這個范圍僅僅包含了39個頻率點,因此整個1024個頻點中大部分浪費了。對CZT,計算結果能產生相同數量的頻率點(1024個),但這些頻率點可以只分布在0.3-12rad/s的范圍,這等于將頻率分辨率提高到了原來27倍,達到△f=(13-0.3)/(2π·1024)=0.00182Hz。(3)CZT有助于減小旁瓣泄漏或者數值污染造成的影響,和FFT相比具有更高的精度。
CZT的這三個重要特性為選取采樣頻率、窗口寬度、頻率分辨率提供了更大的靈活性,提高了飛行試驗數據分析中頻率響應的精度。
3.3 掃頻激勵試驗
本文穩定性邊界測量所使用的輸入和輸出信號在圖10中給出了說明。對于每一個軸,選擇相應的輸入/輸出信號,頻率響應特性就可以代表開環系統的傳遞函數。當掃頻輸入被加入到每一個軸上時,誤差信號就產生了。輸出信號的頻率響應到誤差信號就代表了給定軸的開環傳遞函數。
周期性的掃頻輸入一般會持續30秒,覆蓋1.0到60弧度每秒的頻率范圍。所有的輸入都是計算機生成的。設計的輸入信號是用來激勵一個剛性飛機動態特性的,激勵時飛機保持在配平狀態。為了獲得合理的低頻響應,而不偏離配平狀態,就需要非常小的低頻輸入。
圖11為滾轉軸掃頻試驗時的響應曲線,其中黑色線是總誤差信號,紅色曲線是總反饋信號。
4 飛行試驗結果及分析
4.1 數據處理結果
利用線性調頻Z變換,得到的滾轉軸、俯仰軸頻率響應特性如圖12、13所示。
從試驗結果分析,滾轉軸的幅值裕度為8.7dB,相位裕度為11.5°,遠低于仿真計算時的系統穩定裕度,這就不難解釋在飛行試驗中為何滾轉軸穩定性不足,在強風擾條件下振蕩幅值較大的現象。
而俯仰軸的試驗數據結果表明,該回路閉環系統穩定性仍滿足6dB,45°的穩定裕度要求,實際飛行中該回路也具有良好的穩定性,振蕩幅值較小。
4.2 控制律參數改進及試驗驗證
將滾轉軸主回路的增益進行調整,滿足閉環系統穩定裕度的要求。滾轉軸的頻響特性如圖14所示。
圖15是改進增益后的橫向響應時間歷程曲線,結果表明,滾轉角振蕩幅值為-2°~-9°,優于改進前的穩定性。同時,控制精度滿足飛行任務的要求。
5 結束語
本文通過頻域辨識方法,改進了小型低RCS無人機的控制器性能,其中重點研究了以下問題:(1)中等展弦比飛翼布局無人機的控制器設計及飛行試驗驗證。(2)根據飛行試驗數據,分析滾轉軸穩定性差、振蕩幅值大產生的原因。在飛行試驗中利用掃頻激勵分析閉環系統穩定性,開發一種基于線性調頻Z變換方法的數據處理技術得到各軸的頻響特性。(3)對滾轉軸的控制增益進行改進,使得系統既滿足穩定性要求,同時有良好的控制精度。
參考文獻
[1]Dwight L, Balough. Determination of X-36 stability margins using real-time frequency response techniques, AIAA-98-4154[R]. Reston:AIAA,1998
[2]John T.Bosworth and Susan J.Stachowiak. Real-Time stability margin measurements for X-38 robustness analysis, NASA/TP-2005-212856[R].NASA Dryden flight research center, Edwards, California,2005.
[3]Kevin A.Wise. X-45 Program overview and flight test status, AIAA-2003-6645[R].Reston:AIAA,2005.
[4]Chirstopher D.Regan. In-Flight stability anslysis of the X-48B aircraft, AIAA-2008-6571[R]. Reston:AIAA,2008.
[5]李林,馬超,王立新.小展弦比飛翼布局飛機穩定性分析[J].航空學報,2007,28(6):1312-1317.
[6]李淼,王立新,黃成濤.舵面特性對飛翼構型作戰飛機短周期品質的影響[J].航空學報,2009,30(11):2059-2065.
[7]李林,王立新.小展弦比飛翼布局作戰飛機偏航軸飛行品質評定[J].航空學報,2009,30(6):972-978
[8]李林,馬超,王立新.大展弦比飛翼構型的橫航向操縱特性[J].北京航空航天大學學報,2007,33(10):1186-1190.
[9]馬超,王立新.飛翼布局作戰飛機起降特性分析[J].北京航空航天大學學報,2009,35(4):429-433.
[10]王立新,李林.小展弦比飛翼戰機滾轉軸操縱效能需求特性[J].北京航空航天大學學報,2009,35(8):909-912.
作者簡介:尤俊彬(1990-),男,漢族,山西祁縣人,碩士,助理工程師,主要研究領域為飛行仿真與飛行控制。
華藝欣(1990-),男,漢族,陜西寶雞人,碩士,工程師,主要研究領域為飛行力學與飛行控制。
*通訊作者:張 (1986-),男,漢族,陜西西安人,碩士,工程師,主要研究領域為飛行力學與飛行控制,飛行仿真。
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
遼金歷史與考古(2019年0期)2020-01-06 07:45:20
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
電子制作(2018年11期)2018-08-04 03:26:04
汽車工程學報(2017年2期)2017-07-05 08:13:02
國際商務財會(2017年8期)2017-06-21 06:14:14
電子制作(2017年23期)2017-02-02 07:17:19