
讓汽車科學(xué)轉(zhuǎn)彎
——探尋汽車科學(xué)轉(zhuǎn)彎的操控規(guī)律
2017-06-27 05:47:10文湖北省武昌實(shí)驗(yàn)中學(xué)高二王一帆
發(fā)明與創(chuàng)新 2017年26期
關(guān)鍵詞:汽車
文湖北省武昌實(shí)驗(yàn)中學(xué)高二(3)班 王一帆
讓汽車科學(xué)轉(zhuǎn)彎
——探尋汽車科學(xué)轉(zhuǎn)彎的操控規(guī)律
文湖北省武昌實(shí)驗(yàn)中學(xué)高二(3)班 王一帆

如今開車的人越來越多,表哥剛滿18歲也去報(bào)名學(xué)車,然而學(xué)車的過程并不順利,原因之一就是對(duì)汽車的轉(zhuǎn)向把握不好。事實(shí)上,很多車禍都是在車輛變道、轉(zhuǎn)彎的環(huán)節(jié)中,司機(jī)操控不當(dāng)造成的。
針對(duì)這個(gè)問題,我決定以表哥學(xué)車的經(jīng)歷為契機(jī),探尋解決的辦法。
一、分析問題
表哥說他在學(xué)車時(shí)經(jīng)常遇到的問題是:汽車轉(zhuǎn)向時(shí)前輪能順利通過而后輪總是壓線。
汽車直行時(shí),前、后輪可以形成“一道轍”。轉(zhuǎn)彎時(shí),前、后輪形成的物理軌跡有可能不同。我認(rèn)為,車輛轉(zhuǎn)彎半徑一定程度上可以歸結(jié)為車輪形成軌跡的半徑。
所以,我想以車輪轉(zhuǎn)彎形成的物理軌跡為突破口,通過車輪軌跡的數(shù)理分析,探尋汽車科學(xué)轉(zhuǎn)彎的操控規(guī)律。
二、構(gòu)建模型
1.車輪轉(zhuǎn)彎形成的軌跡關(guān)系
將方向盤轉(zhuǎn)動(dòng)一個(gè)角度并一直行駛時(shí),汽車就會(huì)轉(zhuǎn)圈,每個(gè)輪胎的軌跡都是圓形。四個(gè)車輪轉(zhuǎn)彎時(shí)形成的圓形之間是什么關(guān)系?通過簡(jiǎn)單的數(shù)學(xué)論證就能得出結(jié)論:汽車的四個(gè)輪子在轉(zhuǎn)彎時(shí)形成的軌跡是四個(gè)同心、半徑不同的圓。
2.車輪轉(zhuǎn)彎半徑之間的關(guān)系
既然車輪軌跡是同心但半徑不同的圓,它們的半徑之間又有怎樣的關(guān)系?
(1)通過汽車內(nèi)、外側(cè)前輪偏轉(zhuǎn)角的計(jì)算,分析內(nèi)、外側(cè)車輪轉(zhuǎn)彎半徑之間的關(guān)系。
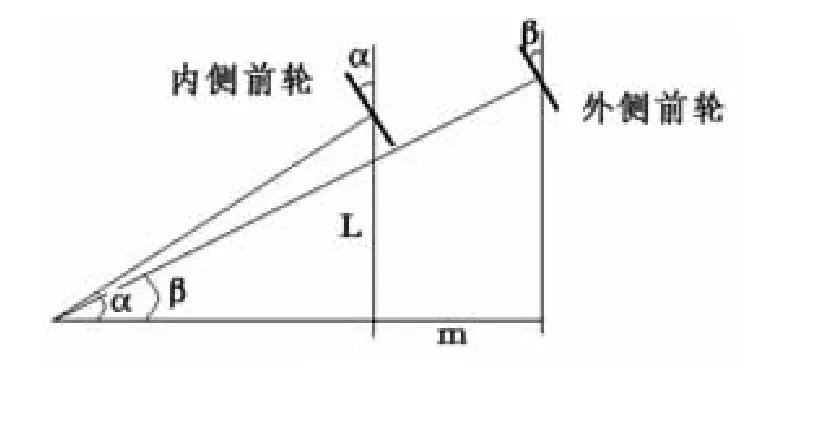
圖1
我采用數(shù)形結(jié)合的方法分析,設(shè)α角為內(nèi)側(cè)前輪的偏轉(zhuǎn)角,L為軸距,m為車寬,β為外側(cè)前輪的偏轉(zhuǎn)角,根據(jù)圖1所示,可求得r(內(nèi)側(cè)后輪)=,r(內(nèi)這個(gè)距離加在后輪上再次構(gòu)圖觀察,發(fā)現(xiàn)其端點(diǎn)也在同一個(gè)圓上。用平滑的線將其連接,便形成了另一個(gè)大圓軌跡,如圖3所示。側(cè)前輪)=,這樣能計(jì)算出內(nèi)側(cè)車輪的軌跡半徑。
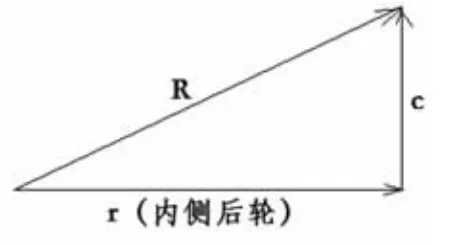
圖2
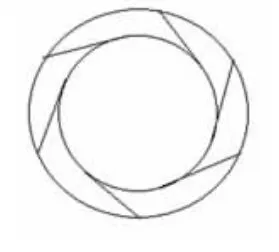
圖3
外側(cè)車輪的軌跡半徑也可根據(jù)內(nèi)側(cè)結(jié)果表達(dá):r(外側(cè)后輪)=(外側(cè)前輪)= ■L2+r(2外側(cè)后輪)=
通過以上分析,可以發(fā)現(xiàn)距離內(nèi)側(cè)后輪軸心的距離c的點(diǎn)的轉(zhuǎn)彎半徑如圖2所示,可以算出該處的半徑 R=。當(dāng)c=0時(shí),內(nèi)側(cè)后輪軌跡半徑最短;該點(diǎn)位于內(nèi)側(cè)前輪軸心時(shí),也就是距離內(nèi)側(cè)后輪軸心最遠(yuǎn)時(shí),半徑最長(zhǎng)。
α、β兩角的大小不同,即內(nèi)側(cè)前輪的偏轉(zhuǎn)角大于外側(cè)前輪的偏轉(zhuǎn)角。
根據(jù)計(jì)算,汽車內(nèi)、外側(cè)車輪偏轉(zhuǎn)角的大小和轉(zhuǎn)彎半徑長(zhǎng)短的關(guān)系是:內(nèi)側(cè)前輪的偏轉(zhuǎn)角大,其轉(zhuǎn)彎半徑短;外側(cè)前輪的偏轉(zhuǎn)角小,其轉(zhuǎn)彎半徑相對(duì)較長(zhǎng)。同理,內(nèi)側(cè)后輪的偏轉(zhuǎn)角大,其轉(zhuǎn)彎半徑短;外側(cè)后輪的偏轉(zhuǎn)角小,其轉(zhuǎn)彎半徑相對(duì)較長(zhǎng)。
(2)通過內(nèi)側(cè)面一點(diǎn)到后輪軸心距離的變化,分析同側(cè)車輪轉(zhuǎn)彎半徑之間的關(guān)系。
汽車如何才能安全轉(zhuǎn)彎?我以汽車內(nèi)側(cè)面為臨界面,分析汽車轉(zhuǎn)彎時(shí)內(nèi)側(cè)哪個(gè)部位經(jīng)過的半徑最長(zhǎng)。
假設(shè)內(nèi)側(cè)某處距離汽車后輪軸心的水平距離為c,設(shè)該處轉(zhuǎn)彎半徑為R,將此半徑為前輪轉(zhuǎn)彎半徑,經(jīng)計(jì)算R=
從汽車內(nèi)側(cè)車輪的數(shù)據(jù)分析可得,前輪轉(zhuǎn)彎半徑長(zhǎng),后輪的轉(zhuǎn)彎半徑相對(duì)較短。同理推得,汽車外側(cè)前輪轉(zhuǎn)彎半徑長(zhǎng),外側(cè)后輪轉(zhuǎn)彎半徑相對(duì)較短。
綜上,汽車四個(gè)車輪轉(zhuǎn)彎半徑長(zhǎng)短關(guān)系是:內(nèi)側(cè)后輪轉(zhuǎn)彎半徑最短,其次是內(nèi)側(cè)前輪、外側(cè)后輪,外側(cè)前輪轉(zhuǎn)彎半徑最長(zhǎng)。
司機(jī)在實(shí)際的駕駛操控中,如果障礙物在轉(zhuǎn)彎內(nèi)側(cè),由于內(nèi)側(cè)前輪轉(zhuǎn)彎半徑長(zhǎng)于后輪,那么前輪能通過,后輪則不一定能通過;如果障礙物在轉(zhuǎn)彎的外側(cè),由于外側(cè)前輪轉(zhuǎn)彎半徑長(zhǎng)于后輪,所以只要前輪能通過,后輪肯定能順利通過。
(3)通過測(cè)算模型找出安全轉(zhuǎn)彎操控的規(guī)律。
①假設(shè)車輛前、后兩輪轉(zhuǎn)彎的半徑差為s,設(shè)前輪經(jīng)過障礙物時(shí),與障礙物的距離為x,經(jīng)過計(jì)算。所以,當(dāng)后輪壓線時(shí)s>x,當(dāng)后輪可以順利通過時(shí)s<x。
根據(jù)這個(gè)公式,當(dāng)s=x時(shí)就可以算出在想要保證后輪不壓線時(shí),前輪應(yīng)該與障礙物保持的最小距離。
結(jié)合前述車輪偏轉(zhuǎn)角與轉(zhuǎn)彎半徑間的公式關(guān)系,即r(內(nèi)側(cè)后輪)=為保證轉(zhuǎn)彎時(shí)后輪不壓線或不壓空,現(xiàn)以一軸距L為2m的特定汽車為例進(jìn)行測(cè)算。
設(shè)α是車輪偏轉(zhuǎn)的角度,r是內(nèi)側(cè)后輪的轉(zhuǎn)彎半徑,x是前輪與障礙物保持的最小距離,由此可形成一個(gè)閉合式的測(cè)算模型。以特定值測(cè)算的數(shù)據(jù)值如表1。
②根據(jù)半徑差值s的公式還可以發(fā)現(xiàn),s的大小與軸距L有關(guān),我想這也可以解釋為什么持C照的司機(jī)不能開大車。下面通過計(jì)算進(jìn)行簡(jiǎn)要證明。
假設(shè)一輛軸距為2m的小車的偏轉(zhuǎn)角為45°(事實(shí)上一般偏轉(zhuǎn)角不會(huì)這么大,但為了進(jìn)行更鮮明的數(shù)據(jù)對(duì)比和計(jì)算方便,暫且設(shè)偏轉(zhuǎn)角為45°),算出s≈0.83m。若一輛軸距為10m的大車偏轉(zhuǎn)角也為45°,算出s≈4.15m。
比較兩組數(shù)據(jù)可以看出,大車需要留出的空間是小車的5倍,這就說明駕駛大車時(shí)需要更好的操作技術(shù)。
③方向盤轉(zhuǎn)動(dòng)角度與車輪實(shí)際偏轉(zhuǎn)角度的比值為轉(zhuǎn)向傳動(dòng)比,假設(shè)轉(zhuǎn)向傳動(dòng)比為20∶1,α代表車輪偏轉(zhuǎn)角度,20α代表方向盤轉(zhuǎn)動(dòng)角度,r為半徑,相關(guān)數(shù)據(jù)參數(shù)測(cè)算如表2。
(4)經(jīng)過上述模型的建立,在確保汽車內(nèi)側(cè)后輪安全通過障礙物的基礎(chǔ)上,根據(jù)數(shù)據(jù)鏈關(guān)系,可得到前輪與障礙物保持的最小距離。
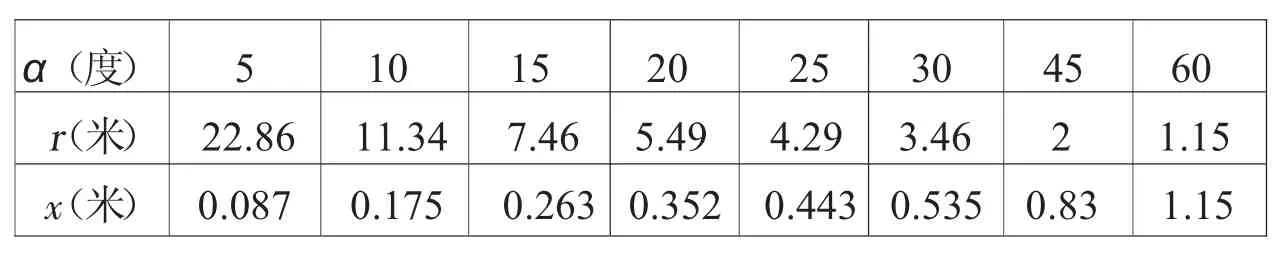
表1

表2
因?yàn)檐噷抦是固定的,所以外側(cè)前輪確保安全通過障礙物的最小數(shù)值等于前輪與障礙物保持的最小距離加上m。
根據(jù)上述分析,在行車轉(zhuǎn)彎的過程中,涉及安全操控的關(guān)鍵問題本質(zhì)上是汽車內(nèi)側(cè)后輪和外側(cè)前輪的轉(zhuǎn)彎半徑問題,即兩側(cè)前輪與障礙物、危險(xiǎn)邊界保持的最小距離數(shù)值。該數(shù)值可通過測(cè)算模型得出。
猜你喜歡
人民交通(2020年22期)2020-11-26 07:36:44
小學(xué)生優(yōu)秀作文(低年級(jí))(2020年4期)2020-07-24 08:31:08
汽車與安全(2019年9期)2019-11-22 09:48:03
汽車與安全(2019年8期)2019-09-26 04:49:10
汽車與安全(2019年5期)2019-07-30 02:49:51
汽車觀察(2019年2期)2019-03-15 06:00:06
汽車與新動(dòng)力(2018年2期)2018-05-09 00:31:56
兒童時(shí)代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(jí)(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
- 發(fā)明與創(chuàng)新的其它文章
- 采編“神器”大聚會(huì)
- 開心劇場(chǎng)
- 為愛關(guān)機(jī)
- 蝎子和螞蟻
- 善良讓赤貧成富豪
- 另眼看科技