模架無線實時變形監測系統的設計與精度標定
2017-07-05 15:23:16李長青崔有禎武勝林
測繪通報 2017年6期
關鍵詞:變形
鄭 闊,李長青,崔有禎,武勝林
(北京工業職業技術學院建筑與測繪工程學院,北京 100042)
?
模架無線實時變形監測系統的設計與精度標定
鄭 闊,李長青,崔有禎,武勝林
(北京工業職業技術學院建筑與測繪工程學院,北京 100042)
介紹了模架無線實時變形監測系統的基本構成和主要工作過程,提出了使用絕對激光跟蹤儀對其核心部件位移和角度傳感器進行監測精度標定,設計了模架無線實時監測傳感器工作和標定試驗模型,通過試驗分析為傳感器精度的判定和升級研發提供了有效的數據支撐。
模架;實時監測;傳感器;精度標定;激光跟蹤儀
近期,大跨度、重荷載、高凈空的混凝土結構和鋼結構建筑大量涌現,其設計也日趨復雜,模板工程在搭設、施工、使用中作業危險因素多,極易發生傷亡事故,據統計近3年發生的47起較大及以上事故案例中,模板支撐體系及腳手架坍塌事故有18起,占事故總量的38.3%,2015年模板支撐體系坍塌事故6起,死亡32人,分別占較大事故總數的27.27%和37.65%。除了技術、施工方案、管理原因外,建立起一套行之有效的模架位移變形監測及預警系統,將極大降低模架坍塌災害的發生率且盡可能地減少人員財產損失。本文對建筑模架位移監測及預警系統組成及核心部件變形監測傳感器(簡稱傳感器)工作原理進行了分析,設計試驗對其監測精度進行了標定,并在北京新機場項目中實踐應用,取得了較好的效果。
1 傳感器的研制
1.1 模架施工與變形監測現狀
我國常用扣件式、碗扣式和盤扣式3種架體,扣件式使用廣泛。扣件式架體規定:鋼管規格48 mm×3.6 mm,可調托撐外徑不小于36 mm,支托板厚不小于5 mm。現場隨機抽取12根剛管試樣試驗結果為:管徑基本滿足要求,壁厚嚴重不達標的占50%,有偏差的占33%,完全達標的17%。規范對于U托的規定:外徑不得小于36 mm,支托板厚不應小于5 mm。而現場調查發現:外徑100%不合格;板厚全部100%不達標。鋼管及U托調查數據見表1、表2。因此,鑒于現存的潛在工程質量問題,對模架進行規范的變形監測已經到了非常緊迫的階段。
《建筑施工臨時支撐結構技術規范》(JGJ 300—2013)8.0.3關于模架位移規定“監測點應設在角部和四邊的中部位置”。常用的監測方法有電子經緯儀、水準儀、全站儀、紅外線水準儀、激光垂直儀等。目前建筑工地在澆筑混凝土過程中,監測頻率每30 min一次,終凝后的監測頻率為每天一次,連續觀察7天。但是,實際施工現場狀況多為澆筑混凝土梁部位受力較大,主梁在建筑體內部的較多。變形情況是模架內部首先變形,而后向外擴展,內部變形是架體整體失穩的先導因素。變形破壞在短時間內結束,屬于失穩破壞,不會持續半小時。
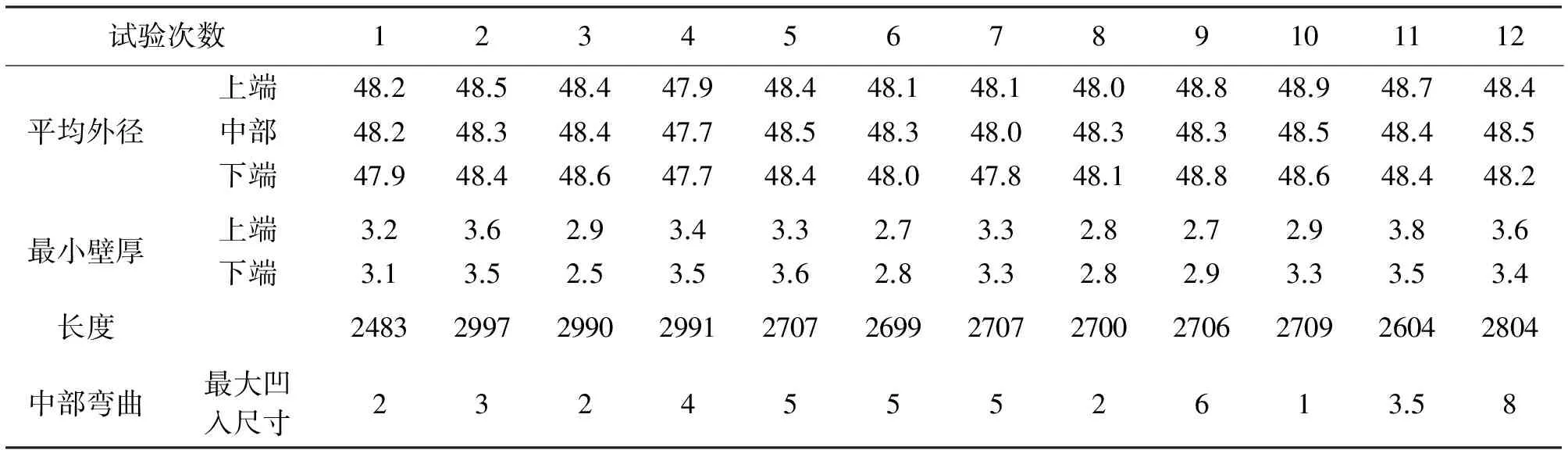
表1 模架應用現實情況——鋼管
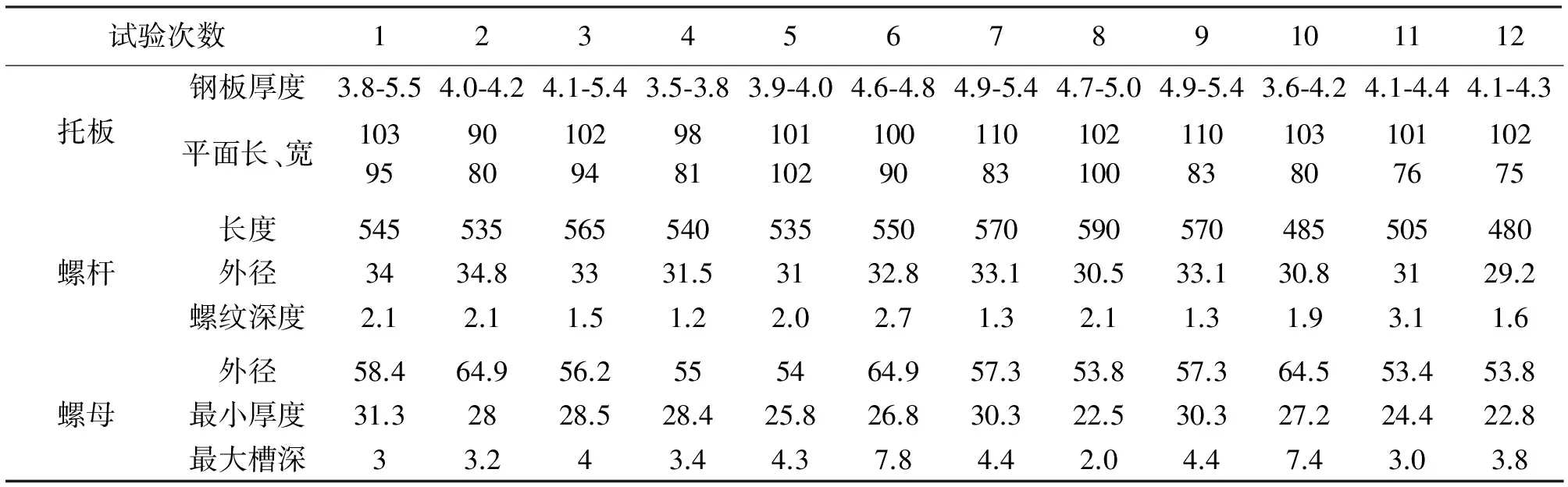
表2 模架應用現實情況——U托
因此,在使用傳統的監測手段進行模架變形監測時,不能準確測量模架內部變形,也不能實現實時監測,更不能實現遠程監測。尤其是桿件密集,通視性不好,無法固定支座,理論可行而實際實施時難度很大。
1.2 傳感器的研制
為了解決以上問題,采用煤礦巖石位移的測試原理,使用傳感器采集信號、電子模塊、無線通信等手段,研發了模板支撐架變形遠程實時監測系統。系統可監測內容包括模架水平位移、豎向位移、總位移和轉角。監測方式為連續實時監測,曲線顯示,限值報警。監測位置可通過數值計算或經驗選擇,一般模架內部變形量較大的部位為高支模頂部和中間部分。系統組成如圖1所示。
監測系統核心部件位移監測傳感器和角度傳感器的監測精度如何確定是系統研制后期面臨的主要問題。
2 傳感器精度標定方案
由于傳感器位移監測精度設計為0.1 mm,角度監測精度為0.1°,因此為了對其精度進行標定,采用觀測精度更高數量級的徠卡AT402新一代絕對激光跟蹤儀進行精度標定。AT402主要性能參數見表3。
標定工作過程為通過對腳手架施力,模擬腳手架在實際工作中的受力產生形變位移,在模架上選取位于角度傳感器附近一監測點放置棱鏡,通過AT402對監測點形變量的測量得到形變數據,在對數據進行后處理得到在施工坐標系中的形變量。以此再與由角度、位移傳感器采集數據聯合解算得出的監測點位移變量進行對比,由于激光跟蹤儀的精度高,傳感器相比激光跟蹤儀精度較低,以激光跟蹤儀數據為基準,對傳感器數據進行標定。傳感器標定工作現場如圖2所示。標定步驟為:
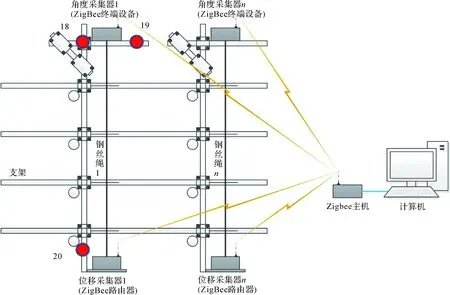
圖1 模架無線實時監測系統

圖2 標定工作現場
(1) 建立試驗模型,在監測點和基準點安置棱鏡并固定牢固,如圖1所示,在監測點安置角度傳感器,下方安置位移傳感器,兩個傳感器用鋼絲輕輕拉緊并使位移傳感器拉力采集器受力為0。
(2) 為各個試驗點進行編號,如圖1所示,其中18號點為位移監測點,19、20號點為參考點。
(3) 架設激光跟蹤儀,采集首期基準三維數據(作為形變量的參考)。
(4) 在腳手架基座東南西北4個方向安置可升降螺絲,分別單獨和組合調整螺絲高度,模擬腳手架受力,達到腳手架變形的目的。
(5) 跟蹤儀與傳感器分別采集形變后的三維數據。
(6) 數據處理及標定結論。
3 傳感器精度標定數據分析
3.1 標定數據
由于傳感器位于腳手架上,計算出來的坐標及方向是施工坐標,并且角度傳感器使用的是歐拉坐標系,而跟蹤儀采用自由設站法,默認坐標系為站心直角坐標系,因此需要進行坐標轉換以進行比較。比較結果見表4—表6。
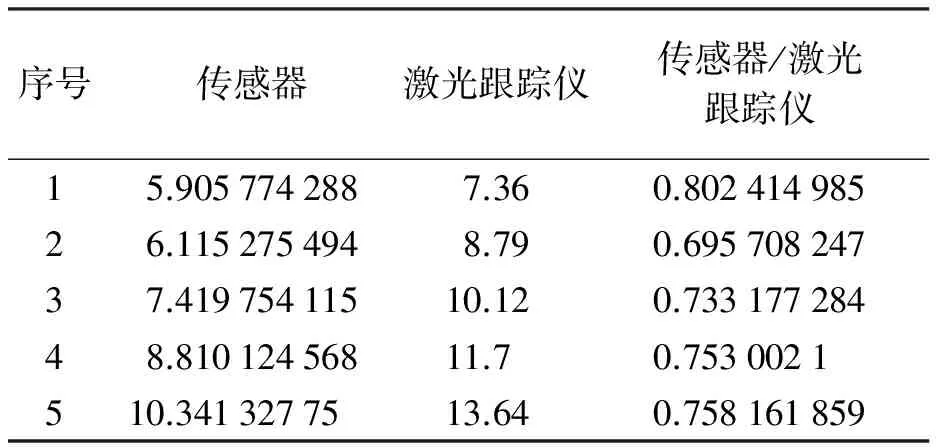
表5 豎向位移比較
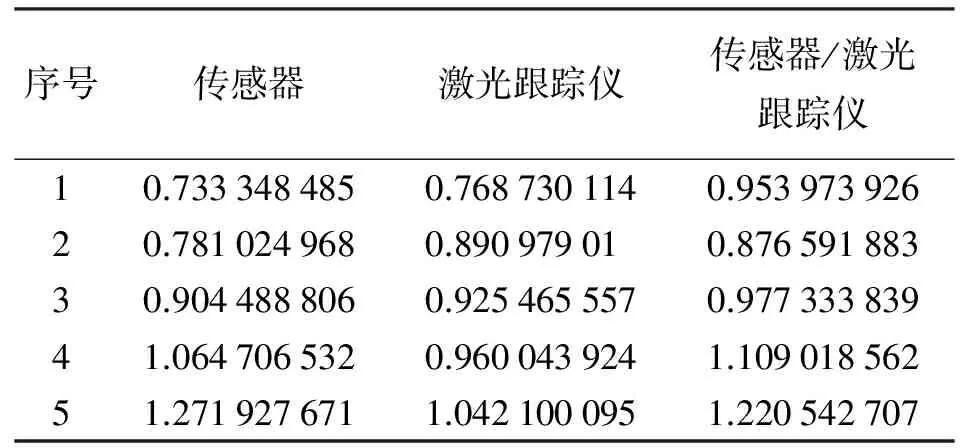
表6 空間角度比較
3.2 數據分析
通過對多期數據進行對比分析發現,傳感器與跟蹤儀監測值比值統計為:角度平均誤差1.018%,水平位移平均誤差1.024 5%,豎向位移平均誤差1.014 9%,系統綜合位移精度0.3 mm。統計曲線如圖3—圖5所示。
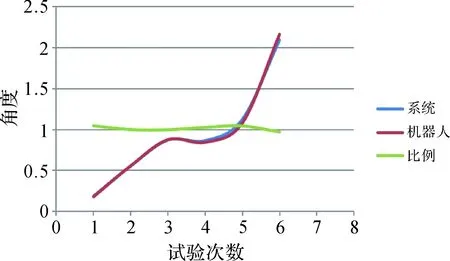
圖3 空間角度監測值比較
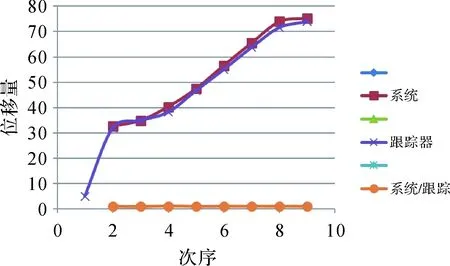
圖4 水平位移監測值比較
通過統計圖可以看出傳感器數據與激光跟蹤儀監測數據比值基本趨于穩定,由于傳感器精度低,激光跟蹤儀AT402精度高,因此折線統計圖會出現浮動。標定工作獲取了合理(即以高精度儀器校正低精度儀器)的結果,符合預期目的。
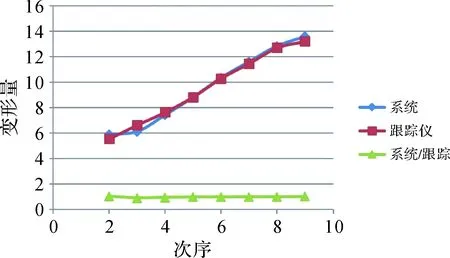
圖5 豎向位移監測值比較
4 傳感器應用案例
模架無線實時監測系統在北京新機場建設項目中進行了實際應用,如圖6所示。待測大梁規格為270 000 mm×2200 mm×25 000 mm。模架類型為盤扣。
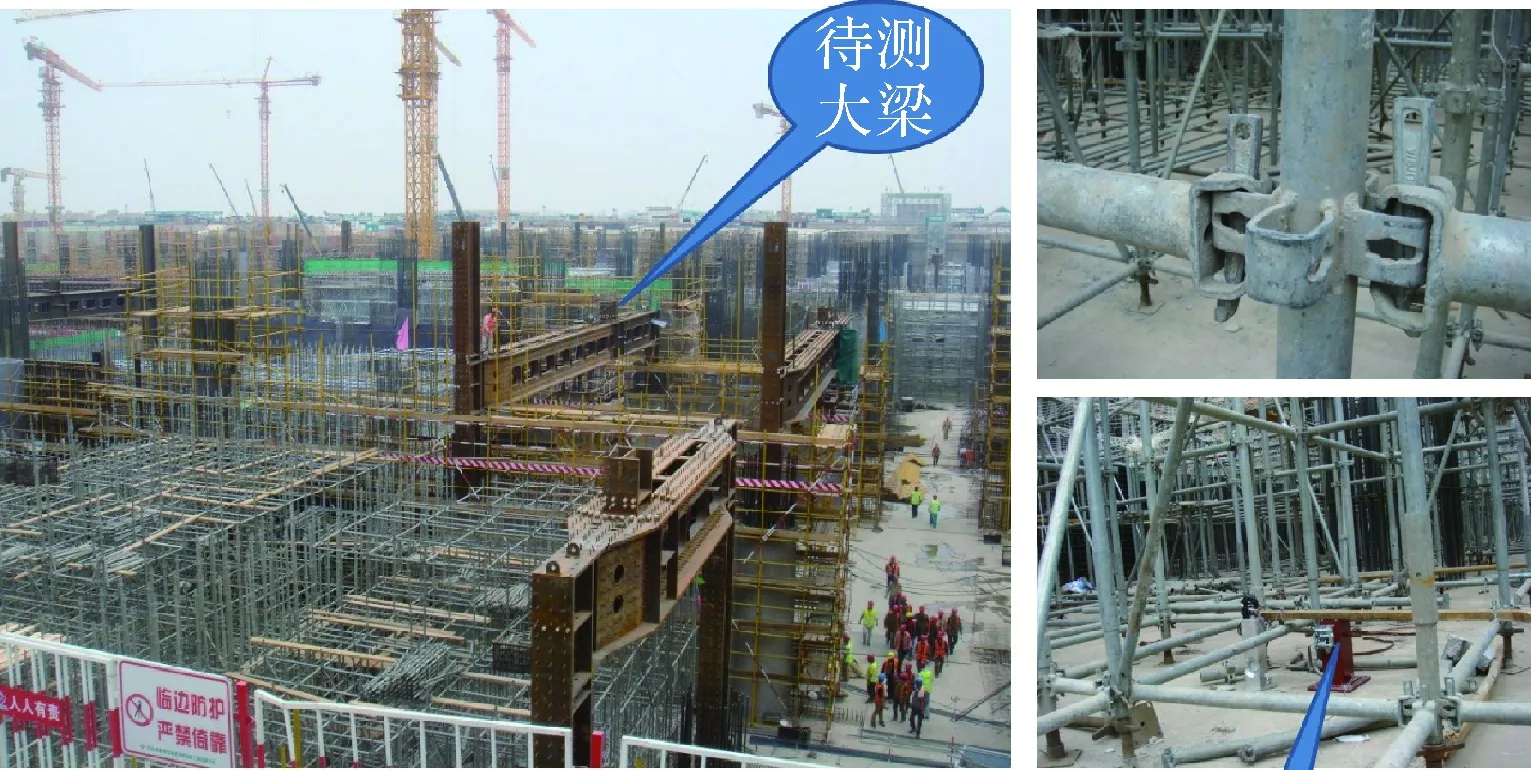
圖6 北京新機場監測現場
通過監測數據和曲線圖7可以看出,傳感器的精度分辨率、實時性、變形規律的原因反應均獲得了良好的效果。
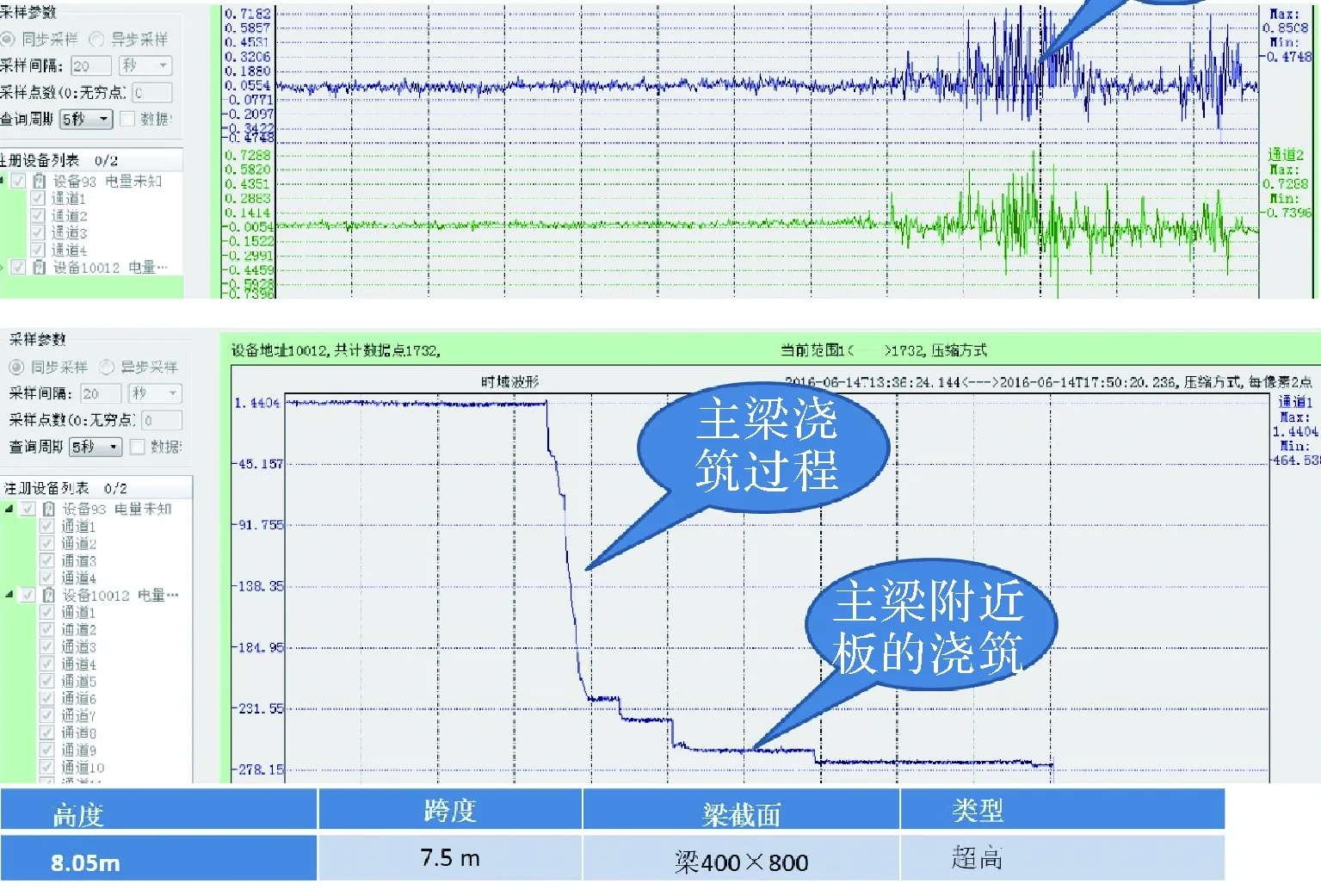
圖7 北京新機場監測系統觀測曲線
5 結 語
在實際項目中,由于正值北京雨季,傳感器也出現了由于制造工藝原因遇雨水短路斷電等現象,因此,加強傳感器工業產品化質量要求是從研發走向生產的重要步驟。另外,監測系統需進一步增加功能,除了位移信息外,還需要監測模架的應力信息、壓力信息等,數據傳輸也需要從局域無線到Internet遠程傳輸,進一步提高系統在復雜艱苦的建筑施工環境中的工作效率和穩定性,切實減少人員的工作量,提高安全性。
傳感器的監測精度理論上隨著元器件的結構和設計優化可以繼續提高,這對精度標定也提出了更高要求。AT402理論精度在μm量級,如何進一步優化觀測的時間、距離、頻率及觀測棱鏡的配套使用等方面挖掘其精度潛力也有待繼續研究。
[1] 鄭闊,李長青,崔有禎,等. 激光跟蹤儀在高支模支護體系變形監測中的應用[J].測繪通報,2016(11):99-102.
[2] 安沁麗,劉金龍. 扣件式鋼管模板高支撐體系現場監測[J]. 重慶建筑,2012,11(10): 45-46.
[3] 余劍鋒. 門架與鋼管混搭型高支模實例的受力變形分析[J]. 廣東土木與建筑,2009(9):50-51.
[4] 盧松耀,梁龍昌,何廣靜. 基于測量機器人的高支模變形監測研究與應用[J].測繪通報,2015(7):85-88.
[5] 孟威. 某大跨度結構高支模體系的監測分析[J].安徽建筑,2013,20(5):187-188.
[6] 朵潤民,蘇鍵,韓強,等. 無線智能監測儀在高支模預壓監測中的應用[J].廣州建筑,2015,43(6):20-23.
[7] 于成浩,柯明,趙振堂. 提高激光跟蹤儀測量精度的措施[J].測繪科學,2007,32(2):54-56.
[8] 甘霖,李曉星. 激光跟蹤儀現場測量精度檢測[J].北京航空航天大學學報,2009,35(5):612-614.
[9] 歐陽健飛,劉萬里,閆勇剛,等. 激光跟蹤儀坐標測量精度的研究[J].紅外與激光工程,2008,37(S1):15-18.
[10] 何永琦,陳偉民,符玉梅. 傾斜傳感器在橋梁變形監測中的應用[J].重慶大學學報(自然科學版),2004,27(7):28-31.
[11] 張學智,應義淼,章雪峰,等. 扣件式鋼管模板高支撐體系現場動態檢測與分析[J].施工技術,2009(S2):414-417.
[12] 徐亞明,周建國,張鵬,等. 無線傳感器網絡變形監測研究綜述[J].測繪地理信息,2016,41(5):1-7.
This paper introduces the basic structure and the main working process of the wireless real-time deformation monitoring system for form-work, and proposes the use of an absolute laser taker with comprehensive instrument to mold the core components of displacement and angle sensor to monitor the accuracy of calibration, and designs wireless real-time monitoring sensors and calibration work in experimental models. Experimental analysis provides effective data support for the determination of sensor precision and the development of R & D.
form-work; real-time monitoring; sensor; calibration accuracy; laser tracker
鄭闊,李長青,崔有禎,等.模架無線實時變形監測系統的設計與精度標定[J].測繪通報,2017(6):137-141.
10.13474/j.cnki.11-2246.2017.0208.
2016-11-02
北京市教育委員會創新平臺項目(PXM2014-014225-000020);北京工業職業技術學院一般科研課題(bgzyky201720)
鄭 闊(1975—),男,碩士,講師,主要研究方向為工程測量。E-mail:171341968@qq.com
P208
A
0494-0911(2017)06-0137-05
Design and Precision Calibration of Wireless Real-time Deformation Monitoring System for Form-workZHENG Kuo,LI Changqing,CUI Youzhen,WU Shenglin(College of Architecture and Surveying and Mapping Engineering, Beijing Polytechnic College, Beijing 100042, China)
猜你喜歡
智慧少年·故事叮當(2020年10期)2020-11-06 06:19:00
中華詩詞(2020年1期)2020-09-21 09:24:52
河北理科教學研究(2020年1期)2020-07-24 08:14:34
作文成功之路·小學版(2020年11期)2020-02-01 06:26:58
作文周刊·小學二年級版(2018年29期)2018-11-26 11:20:28
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
童話世界(2018年14期)2018-05-29 00:48:08
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36