基于三維激光雷達的道路可通行區域分割提取方法*
2017-07-12 17:02:54鄒斌饒陽侯獻軍王科未
汽車技術 2017年6期
鄒斌 饒陽 侯獻軍 王科未
(武漢理工大學,現代汽車零部件技術湖北省重點實驗室 汽車零部件技術湖北省協同創新中心,武漢 430070)
基于三維激光雷達的道路可通行區域分割提取方法*
鄒斌 饒陽 侯獻軍 王科未
(武漢理工大學,現代汽車零部件技術湖北省重點實驗室 汽車零部件技術湖北省協同創新中心,武漢 430070)
為實現無人駕駛車輛利用車載三維激光雷達提取道路可通行區域,提出了一種基于小波變換結合模糊線段擬合的道路分割提取方法。利用探測傾角聚類的方法分割激光雷達掃描線在地面上的投影,通過小波變換初步確定路沿和障礙物位置,再使用模糊線段的方法精確定位路沿和障礙物。試驗結果表明,該方法具有較高的精度與實時性。
1 前言
無人駕駛車輛是通過車載傳感系統感知道路環境,自動規劃行車路線并控制車輛到達預定目標的智能汽車[1]。無人駕駛車輛通常裝有由激光雷達和攝像頭組成的傳感器系統,用于識別障礙區域和道路區域。基于機器視覺的檢測方法數據量大,可較好地對目標進行分類與檢測,但機器視覺易受到外部環境的影響,激光雷達對外部干擾的魯棒性強,而且對縱向運動目標的解析度高,測距范圍大、視野更廣。目前,三維激光雷達在無人駕駛車輛上得到了廣泛應用[1]。現有的三維激光雷達道路分割算法通常將原始數據網格化或無向圖化。基于網格的道路分割算法將三維點云聚類到網格中,通過分析每個網格中的三維點云特性確定該網格的屬性。Kammel[2]提出一種基于網格中點云最大高度差的道路檢測方法;Himmelsbach等[3]將三維點云以極坐標的形式網格化,分離道路與障礙物區域。此類方法使得原始數據細節大量丟失,檢測精度主要取決于網格大小,大量子網格內無數據,造成存儲空間和處理時間的浪費。基于無向圖的道路分割算法主要在每個數據點與相鄰點之間建立領域系統,使得對三維點云的處理轉化為圖像處理。Moosmann等[4]根據區域增長法分割點云圖像,得到道路區域;Montemerlo等[5]使用三維數據環之間的距離判斷單個三維點是否屬于地面區域。相比于網格算法,基于無向圖的算法保留所有原始數據,精度更高,但運算量大。本文提出一種新的算法,在滿足高精度要求的同時,處理掃描單線的運算速度快,可滿足實時性要求。
2 算法綜述
2.1 算法流程
本文采用16線Velodyne三維激光雷達VLP-16,安裝在車輛頂部。為分析道路區域連續性特征,首先剔除高度信息,將所有三維點云投影至地面,最終得到的可通行區域是該平面內的部分區域。本文僅分析車輛前方的道路情況,受VLP-16的精度限制,距離過遠處單線間隔過大,可能漏檢障礙物導致檢測失效。因此,僅保留原始三維數據中車輛前方20 m及左、右側各10 m的數據點,規定三維激光雷達所在點為(0,0),無人駕駛車輛前方為x軸正方向,某幀實際場景如圖1所示。

圖1 數據點云在地面上的投影
由圖1可知,路沿處及障礙物區域與可通行道路區域有明顯差異,每條掃描線在可通行道路區域光滑連續,在路沿處和障礙物區域呈斷開或折角狀態。將圖1進行人工特征標記,結果如圖2所示。
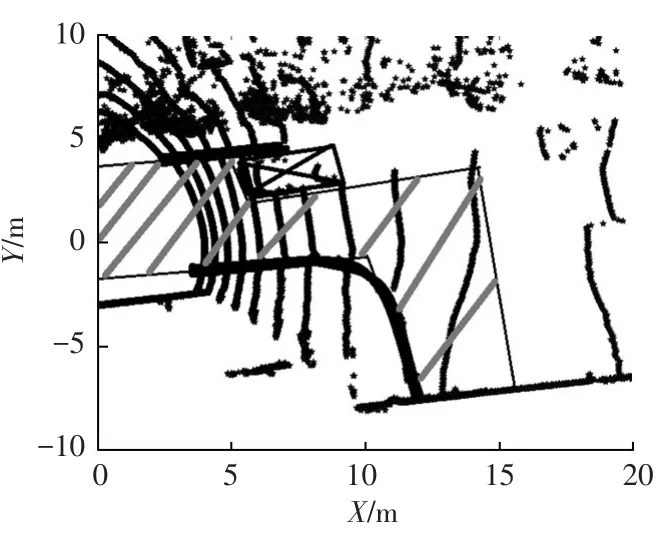
圖2 道路分割人工標記結果
圖2中人工標記的矩形框為道路區域的障礙物車輛,線段加粗部分為路沿,多邊形框內為理想的可通行區域,必須在此區域內規劃軌跡。為得到該區域,需將每條掃描單線切割提取。據此,本文提出基于掃描單線的障礙物及路沿特征提取算法,流程如圖3所示。其中,三維激光雷達原始數據的預處理包括解析數據包、修正坐標偏移、提取有效范圍內的數據點等。
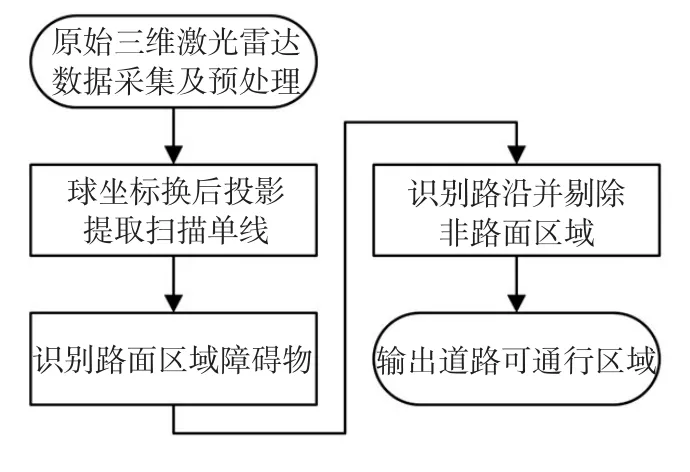
圖3 算法流程
2.2 掃描單線提取
VLP-16三維激光雷達垂直測量角度范圍為30°(-15°~15°),垂直方向角分辨率為2°,水平方向角分辨率為0.2°。將獲得的笛卡爾坐標系下的點云數據轉換至球坐標后,得到所有點的仰角值,理論上仰角值相差不小于2°的點屬于不同單線。依據仰角值由低到高聚類,不同點的仰角值相差足夠小(本文設為0.5°)時可認為屬于同一單線。圖1中數據點經過極坐標(ρ,θ)變換聚類處理后得到若干個單線集,如圖4所示。極坐標變換時,原點不變,x軸正方向對應θ=0°方向,y軸正方向對應θ=90°方向。
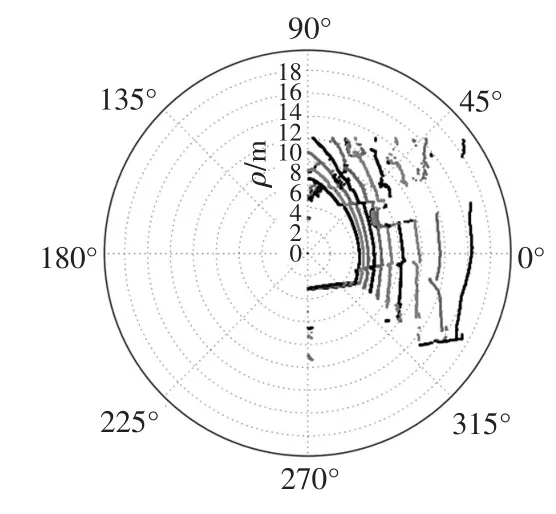
圖4 單線提取
提取單線后,將單線中數據點按照方位角逆時針排列,建立方位角序列與點到三維激光雷達中心距離的函數關系,如圖5所示。分析每條單線定位突變點并剔除不平滑的線段,再識別路沿,定位可通行的道路區域。
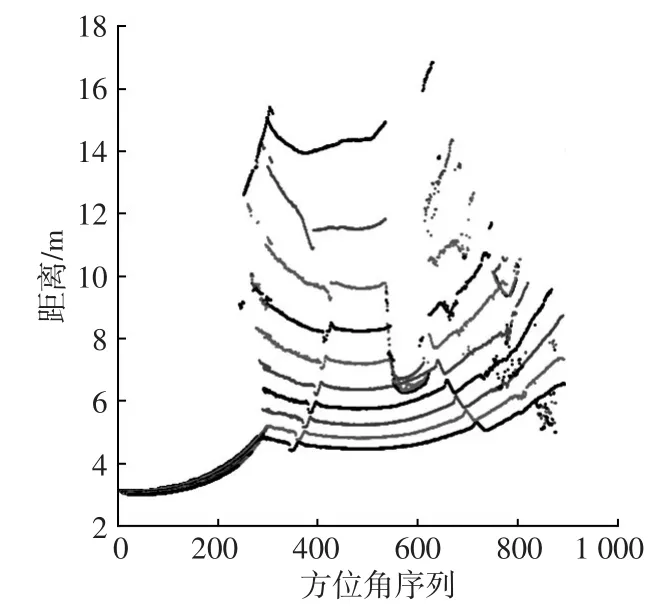
圖5 掃描線上點的方位角序列與距離的關系
3 道路分割提取
3.1 小波變換識別道路障礙物
掃描單線經過小波變換后,利用小波系數進行描述,小波系數表現出原始信號的信息和特性,信息的局部特征可以通過處理小波系數改變。考察小波變換與信號突變性的關系,一般用小波變換后的模極大值在不同尺度上的衰減速度衡量信號的局部奇異性[6]。
若小波函數ψ(t)是連續的實函數,其衰減特性為:

式中,K和ε為常數。
式(1)表明小波函數具有快速衰減性。
信號f(t)∈L2(R)在區間I上存在一致Lipschitz指數α(-ε<α≤1),則存在常數c>0,使對任意a,b∈I,其小波變換滿足:

式中,(Wf)(a,b)為f的小波變換。
反之,如果對于某個α(-ε<α≤1),f(t)∈L2(R)的小波變換滿足式(2),那么f在I上存在一致Lipschitz指數α。設t0為f(t)的突變點,則|(Wf)(a,b)|在b=t0處取得極大值,此時式(2)中的等號成立。
由式(2)可知,如果α>-0.5,則小波變換的模極大值會隨尺度j的增大而增大,如果α<-0.5,則小波變換的模極大值會隨尺度的增大而減小。所以,可通過小波變換的模極大值隨尺度的變化情況判斷信號突變點類型。
信號的突變點檢測是對原始信號在不同尺度上光滑處理,對處理后的信號的一階或二階導數進行極值點檢測[7]。對信號的光滑過程采用的光滑函數一般用θ(t)表示,常用Gaussian函數或者Coiflets函數。一般地,光滑函數滿足:

式中,θ(t)為Coiflets函數。
由卷積的性質可得到:
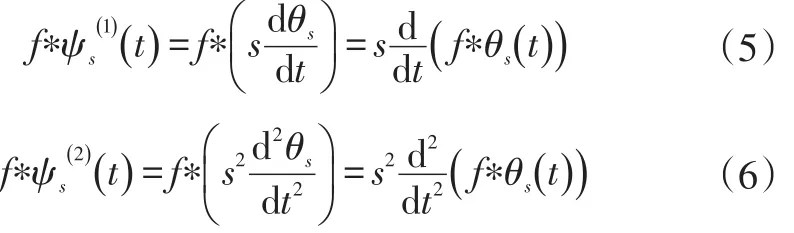
式中,卷積f?θs(t)為平滑算子,表示f(t)經過算子運算后的函數。
由此可知,小波變換(Wf)(s,t)=f?ψs(1)(t)與f?θs(t)的一階導數成正比,而(Wf)(s,t)=f?ψs(2)(t)與f?θs(t)的二階導數成正比,說明在選取光滑函數θs(t)后,原始信號的突變點可以通過檢測小波變換f?ψs(1)(t)和f?ψs(2)(t)的模極大值獲得。在實際應用中,僅在1個尺度下檢測突變點常常很難確定突變點位置,所以需要進行多尺度檢測,只有在多個尺度上均為極值點的位置才能確定為突變點所在的準確位置[8]。對于小波的多尺度分析,常常使用重構的快速算法,即Mallat算法[9]。
將每條單線上的點與雷達中心的距離數據集作為Mallat算法的輸入,利用coif5小波對信號進行分解,得到細節信號,可知突變點包含在多尺度細節信號cD中,與原始信號突變點同步。選取包含車輛障礙、路沿信息以及墻壁障礙的單線(圖4中單線距離由近到遠排列情況下的6號單線)分析,如圖6所示。
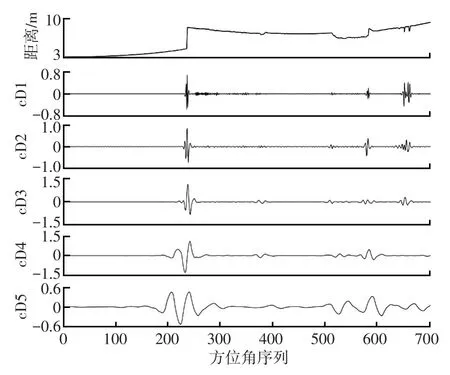
圖6 小波變換細節信號
根據不同尺度下的模極大值找到突變點以及路沿處光滑度較低的區域分割單線。其中障礙物邊界為突變點,通過小波變換可精確定位,實際道路由于路沿較矮,存在破損導致路沿處曲線突變程度不夠明顯,只能確定路沿范圍,本文采用模糊線段的方法精確定位路沿。
3.2 模糊線段擬合識別路沿
二維離散點集擬合模糊線段的參數可通過增量識別模糊線段寬度結合凸包絡邊界線獲取[10]。為了提高識別速度,根據試驗數據給定優化的初始值。擬合識別算法流程為:
a.將掃描單線根據方位角序列輸入,逐點計算當前點與序列中前一點的距離d。若d≥Td,則將前一點作為當前模糊線段的終點,當前點作為新一條模糊線段的起點,模糊線段在此處斷開;若d<Td,則將該點添加進入前一點所在的模糊線段,重新計算上、下包絡平行直線并得到模糊線段寬度,如果該寬度大于設定的閾值Tσ,則將該點作為新的模糊線段的起點,前一個點作為上一條模糊線段的終點。
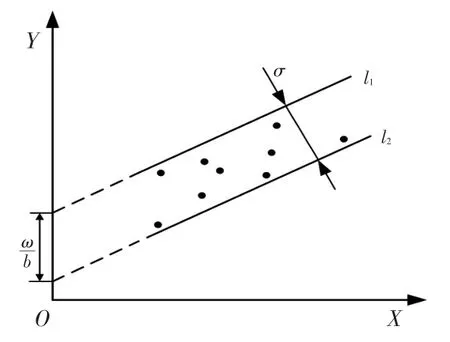
圖7 模糊線段概念示意
b.每條掃描單線完成模糊線段分割后,將相鄰2條模糊線段的包絡平行直線斜率差值小于閥值Te(經驗值)且凹凸性相同的模糊線段歸并為同一條模糊線段,由此將多段較為平滑的模糊線段連成同一條曲線。
三維激光雷達每條掃描單線與雷達中心的距離不同,但具有相同的水平角分辨率,因此每條模糊線段的閥值Td與Tσ均為與模糊線段上點到雷達中心點之間的距離D(取模糊線段上所有點的平均值)相關的自適應參數。VLP-16實際運行頻率為10 Hz,該頻率下三維激光雷達的角分辨率為0.2°,同一掃描單線上相鄰掃描點之間的距離理論上為0.2πD/180,閥值與該距離成正比,根據實際調試效果,本文中閾值使用經驗值。圖4中單線距離由近到遠排列情況下的1號單線經模糊線段擬合后如圖8所示。
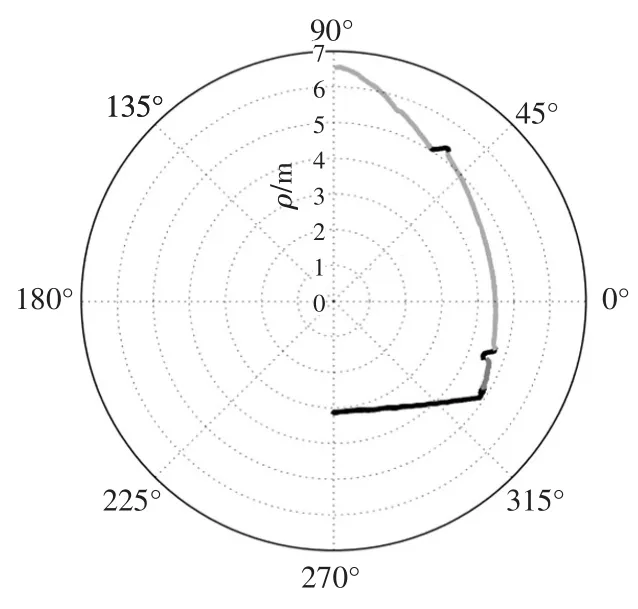
圖8 掃描單線模糊線段擬合結果
3.3 道路分割提取結果
經過小波變換后,結合突變點之間線段點的高度信息剔除障礙物。將所有掃描單線分別通過模糊線段擬合的方式精確分割不同線段,道路兩側不平滑的點組成的模糊線段長度較短且不連續,舍去該部分后如圖9所示。

圖9 去除障礙物及兩側區域
在道路區域,掃描單線與雷達中心的距離隨方位角變化較為平緩,在多尺度小波變換下細節信號cD變化較小,根據此特征提取道路信息如圖10所示。
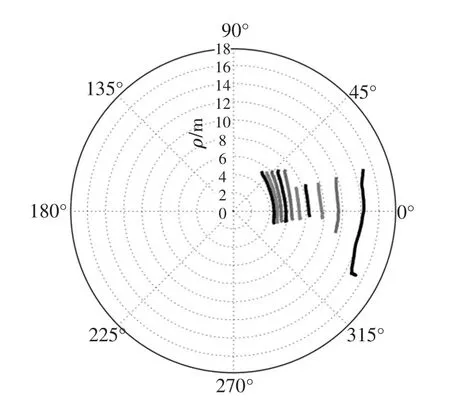
圖10 可通行道路區域
經過多幀測試,本文提供的道路提取方法能在復雜場景下較平滑地提取道路曲線。校園道路上出現行人的可通行道路區域識別結果見圖11,校園道路上停放多個車輛的識別結果見圖12。
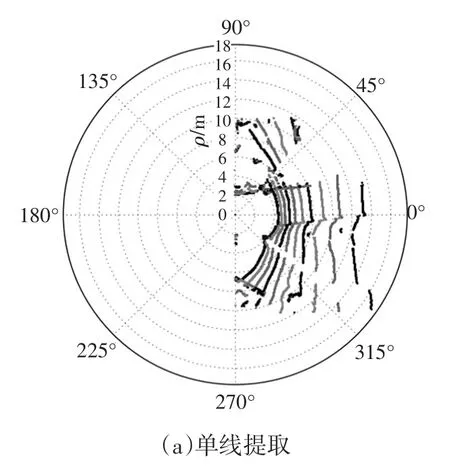
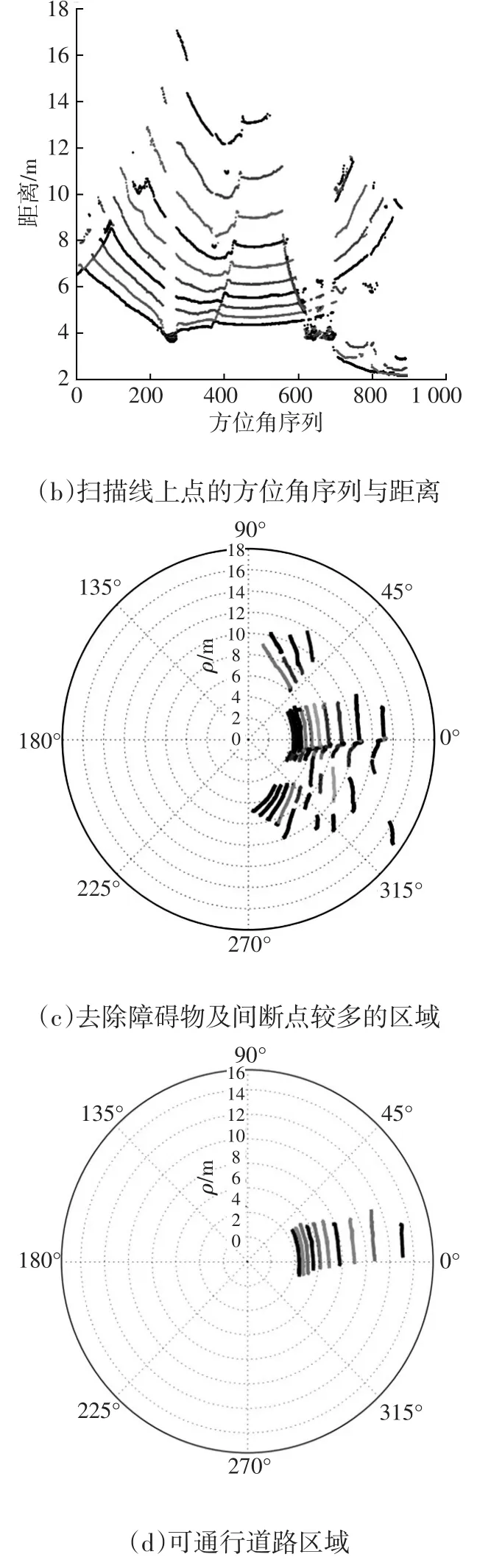
圖11 算法識別結果I
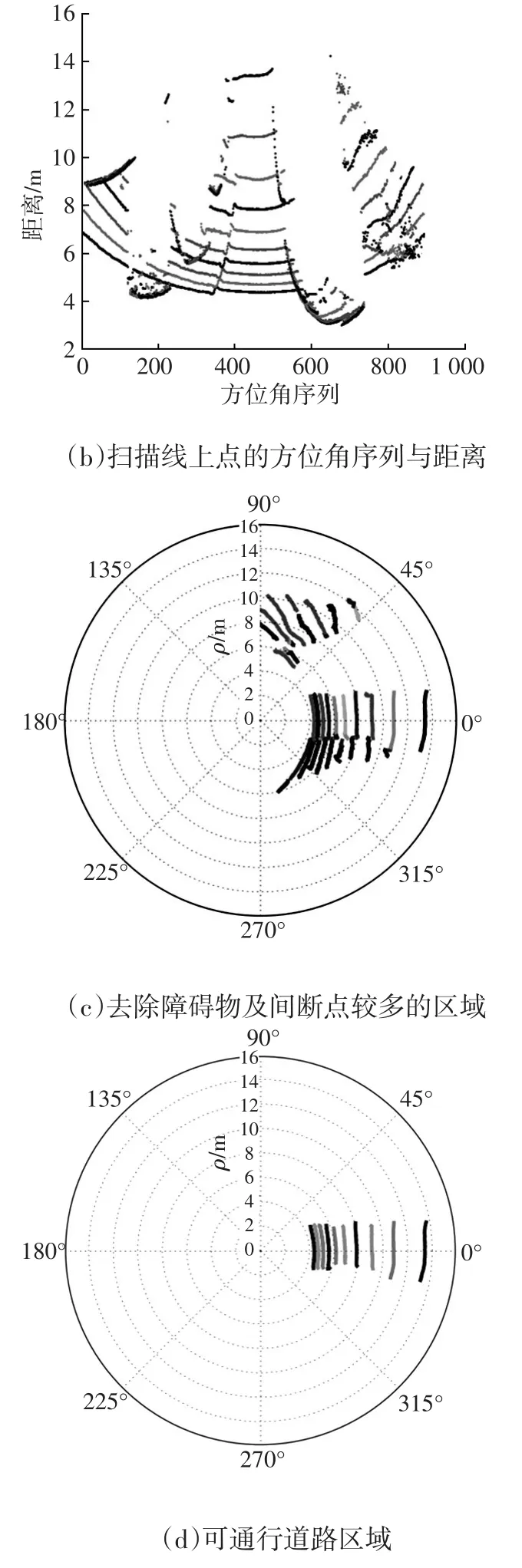
圖12 算法識別結果II
4 試驗結果
本文使用的無人駕駛試驗平臺如圖13所示,三維激光雷達安裝于汽車頂部,轉向、制動、油門通過電子機械改裝實現程序控制。道路分割提取算法在Ubuntu ROS操作系統上使用python實現,在車載電腦上運行。在校園道路上實測1 000幀,提取算法平均每幀耗時58 ms,單幀耗時最高72 ms,最低49 ms,低于三維激光雷達工作周期100 ms,滿足實時性需求。
為分析分割提取算法的可靠性,需驗證在連續多幀情況下每幀數據分割提取的準確率R,將算法結果與人工標記的真值進行量化對比:

式中,oi為每條掃描單線道路提取完整度,以提取長度占實際可通行道路長度的比值表示;ei為修正因子,若出現識別結果包含路沿或障礙物信息,則判定該條掃描單線識別失效;NA為每幀參與運算的掃描單線數目;Tw為布爾型數值,取1時表示該幀道路提取區域能夠規劃軌跡,取0時表示不能。

圖13 無人駕駛自主平臺
在校園道路實測1 000幀圖像的人工標記結果中,有9幀無法進行軌跡規劃,主要原因在于道路凹凸程度較大,導致掃描單線多處斷開,斷開部分判定為障礙物,使前方道路無法通行。其余幀均不影響軌跡規劃,選取其中100幀計算分割提取的準確率R,平均值為98.7%,分割提取效果滿足后續軌跡規劃要求。理論上,道路凹凸不平導致掃描單線提取不完整時可以增大模糊線段擬合中參數的閥值,但由于測試道路路沿較低,這會導致路沿處分割不夠準確,圖14、圖15所示為連續2幀的提取情況。
圖14中存在2條掃描單線由于道路不平提取不夠完整的情況。無人駕駛車輛經過不平坦道路,如果某一幀可通行區域提取不夠完整,但依然能夠規劃局部路徑,可減速行駛繼續更新掃描線數據,直至出現新的完整道路可通行區域。在路面較平坦時,本文提出的算法具有很好的穩定性,路沿及障礙物識別準確,路面可通行區域提取完整度高。
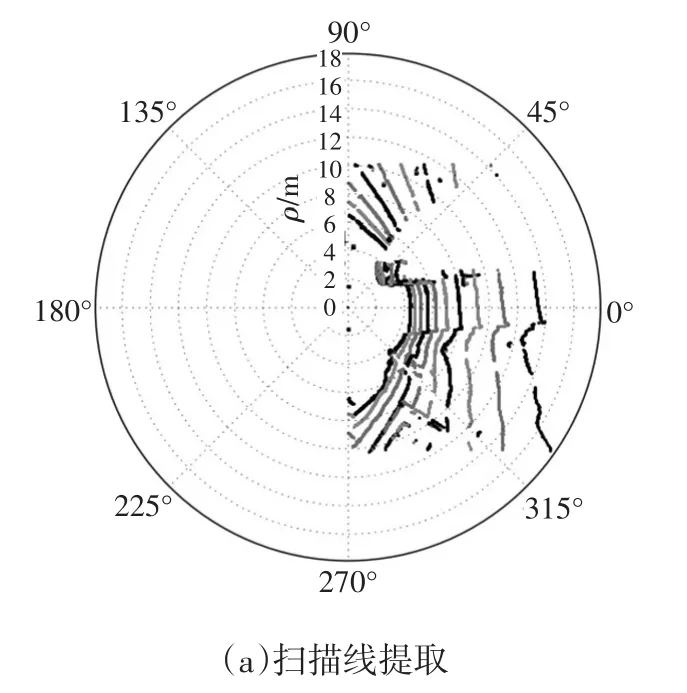
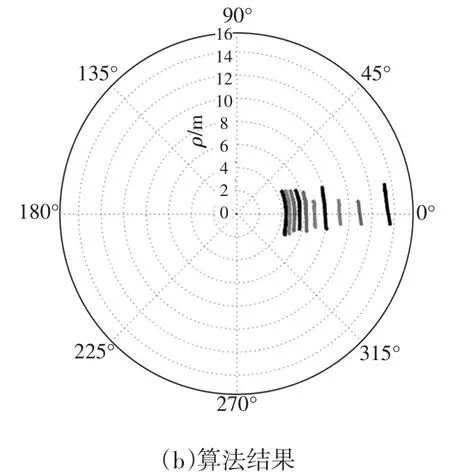
圖14 當前幀提取效果
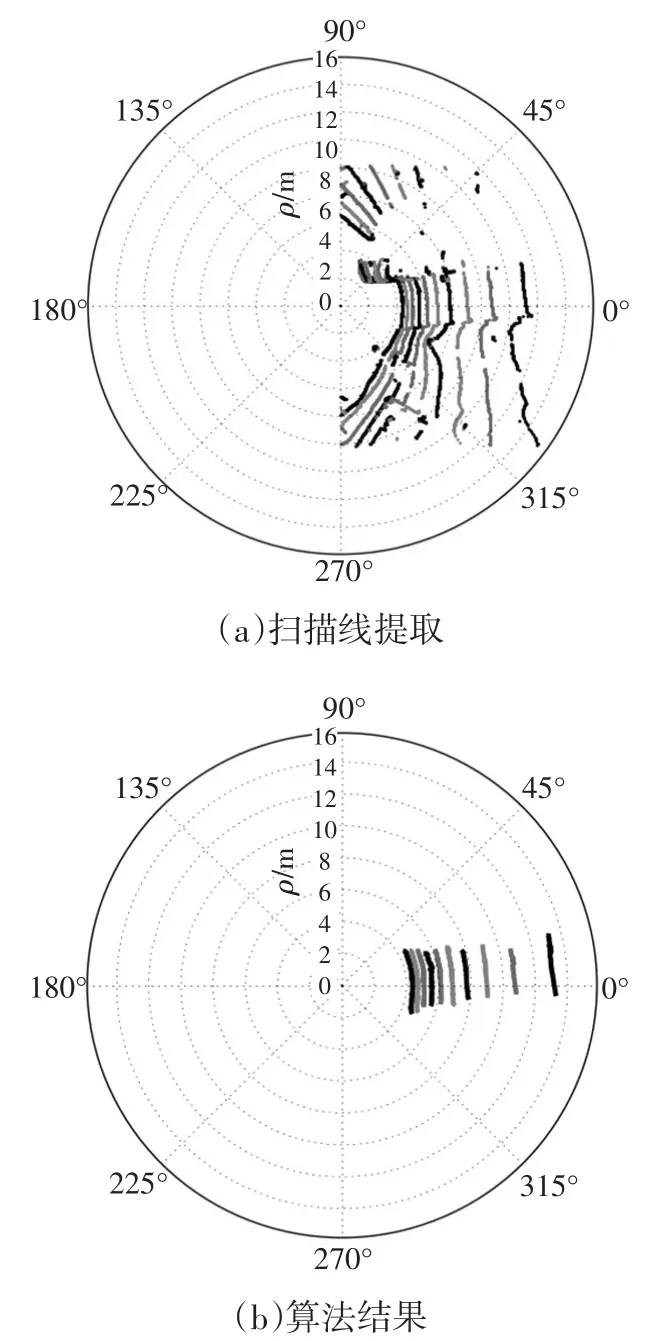
圖15 下一幀提取效果
5 結束語
本文主要通過小波變換結合模糊線段擬合的方法分析三維激光雷達掃描單線信息,提取道路可通行區域。試驗結果表明,該算法兼顧了高精度與良好的實時性,將道路可通行區域接入軌跡規劃模塊,通過校園道路實車測試,無人駕駛試驗車能夠在道路上自主避障行駛,具有良好的穩定性與實時性。由于算法需要依據路沿信息提取道路區域,對無路沿道路以及多車道的情況存在局限性,需融合其他傳感器信息進一步完善無人駕駛算法。
1 段永利,侯蘊琦.無人駕駛汽車開辟新藍海市場.中國信息界,2016(4):66~69.
2 陳慧巖.無人駕駛汽車概論.北京:北京理工大學出版社,2014.
3 Kammel S,Pitzer B.Lidar-based lane marker detection and mapping.IEEE Intelligent Vehicles Symposium,Eind?hoven,2008.
4 Himmelsbach M,Hundelshausen F V,Wuensche H J.Fast segmentation of 3D point clouds for ground vehicles.IEEE Intelligent Vehicles Symposium,La Jolla,2010.
5 Moosmann F.Interlacing Self-Localization,Moving Object Tracking and Mapping for 3D Range Sensors.Kit Scientific Publishing,2013.
6 張小飛,徐大專,齊澤鋒.基于小波變換奇異信號檢測的研究.系統工程與電子技術,2003,25(7):814~816.
7 孫云蓮,劉敦敏.時頻分析與小波變換及其應用.武漢大學學報:工學版,2003,36(2):103~106.
8 刁彥華,王玉田,陳國通.基于小波變換模極大值的信號奇異性檢測.河北工業科技,2004,21(1):1~3.
9 王明祥,寧宇蓉,王晉國.基于Mallat算法的一維離散小波變換的實現.西北大學學報:自然科學版,2006,36(3):364~368.
10 Debled-Rennesson I,Feschet F,Rouyer-Degli J.Optimal blurred segments decomposition in linear time.International Conference on Discrete Geometry for Computer Imagery,Poitiers,2005.
(責任編輯 斛 畔)
修改稿收到日期為2017年3月2日。
Research on Extraction Method of Travelable Road Region Segmentation Based on 3D Laser Radar
Zou Bin,Rao Yang,Hou Xianjun,Wang Kewei
(Hubei Key Laboratory of Advanced Technology for Automotive Components,Hubei Collaborative Innovation Center for Automotive Components Technology,Wuhan University of Technology,Wuhan 430070)
In this paper,a new method based on wavelet transform in combination with blurred segment fitting line for road surface segmentation is proposed for the unmanned vehicle using on-board 3D laser radar to extract travelable road region segmentation.The projection of the laser radar scanning line on the ground plane is segmented by the method of detecting the inclination and clustering.Using wavelet transform to determine the location of the road and obstacles,and then the blurred segment method is applied to accurately locate the road and obstacles.The test results show that the method has high accuracy and real-time performance.
Unmanned vehicles,3D laser radar,Road segmentation,Wavelet transform,Blurred segment
無人駕駛車輛 三維激光雷達 道路分割 小波變換 模糊線段
U471.15;TP391.4;TP27
A
1000-3703(2017)06-0017-07
國家自然科學基金項目(51405359);武漢理工大學自主創新研究基金項目(2016-zy-031)。
猜你喜歡
北京測繪(2022年5期)2022-11-22 06:57:43
汽車觀察(2021年8期)2021-09-01 10:12:41
云南畫報(2020年11期)2020-12-14 07:17:32
鐵道通信信號(2020年6期)2020-09-21 09:23:10
動漫界·幼教365(中班)(2020年3期)2020-04-20 11:03:27
鐵道通信信號(2020年9期)2020-02-06 09:15:54
中國交通信息化(2019年1期)2019-03-26 06:43:46
電子制作(2018年16期)2018-09-26 03:27:00
鐵道通信信號(2016年8期)2016-06-01 12:10:21
云南電力技術(2015年2期)2015-08-23 01:31:46
