基于Kane方程的仿人跑步機器人動力學研究
2017-07-12 09:22:35產啟平
軟件導刊 2017年6期
產啟平

摘要:仿人跑步機器人運動過程分為起跳階段與飛行階段,因此存在不同的拓撲結構,動力學方程建模較為困難。針對該問題,基于Kane方程提出了一種仿人跑步機器人動力學建模方法。該方法的優點在于只需改變“虛擬鉸”長度,便能實現機器人起跳與飛行階段動力學方程的轉換。與Newton-Euler、Lagrange方程相比,最終的Kane動力學方程較為簡潔,易于計算機求解。
關鍵詞:拓撲結構;跑步機器人;虛擬鉸;Kane方程
DOIDOI:10.11907/rjdk.171218
中圖分類號:TP319
文獻標識碼:A 文章編號:1672-7800(2017)006-0152-03
0 引言
跑步機器人研究始于上世紀80年代,最早是由Raibert等[1]采用數種方法研制出跳躍機器人,這些方法為后來機器人的動態研究提供了早期的原則[2]。相對于步行機器人,跑步機器人具有速度快、效率高等一系列優點。因此,近年來仿人跑步機器人受到越來越多研究者重視[3-5]。
跑步機器人的研究不僅在于樣機研制,更重要的在于基礎理論的突破[6]。跑步機器人的動力學問題是機器人基礎理論框架中的核心理論問題之一,在跑步機器人控制策略中具有重要意義[7]。以分析力學為基礎的機械系統動力學建模方法很多,典型的有Newton-Euler方程、Lagrange方程等[8]。同步行機器人相比,跑步機器人在起跳與飛行階段具有不同的拓撲結構,決定其動力學建模是復雜的[9]。而目前跑步機器人動力學建模過程的主要缺點在于沒有完全按照變拓撲結構進行分析,或者按照變拓撲結構分析但建模過程十分繁瑣[10-11]。
針對以上問題,本文基于“虛擬鉸”概念建立了跑步機器人不同階段的動力學方程。該方法的優點是針對跑步機器人不同的變拓撲結構,只需改變“虛擬鉸”的位姿與長度就能實現不同階段動力學方程的轉換,而且相對于Newton-Euler、Lagrange方程,Kane方程建模得到的動力學方程組易于線性化,這將有利于對動力學方程組的計算機求解[12]。為了驗證本方法的正確性與有效性,本文對跑步機器人運動學進行了分析,得到了跑步機器人的運動學量,并由運動學量得到廣義坐標帶入到動力學方程中求得動力學逆解,通過對動力學逆解的仿真,完成了對此方法的驗證。
1 機器人Kane動力學方程建立
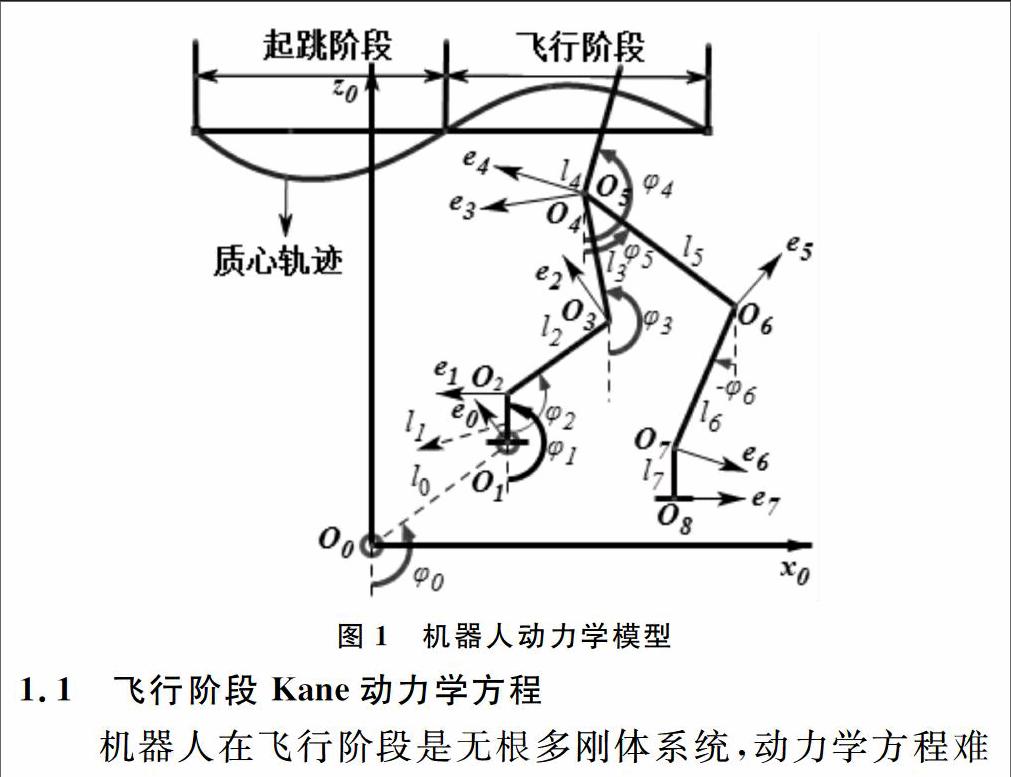
本文采用的機器人可以簡化為7連桿模型,為簡化計算,本文所采用的模型只考慮機器人矢狀面運動,并且各桿件均視為剛體,如圖1所示。每條腿各具有3個矢狀面的轉動自由度,其中髖、膝、踝關節各一個。在起跳階段,機器人總自由度為6,但在飛行階段,機器人腳底和地面不再有約束,機器人在矢狀面增加了3個自由度,此時總自由度為9。由于起跳與飛行階段約束條件的變化,動力學方程在不同階段也隨之改變。因此,其動力學方程必須分階段考慮。
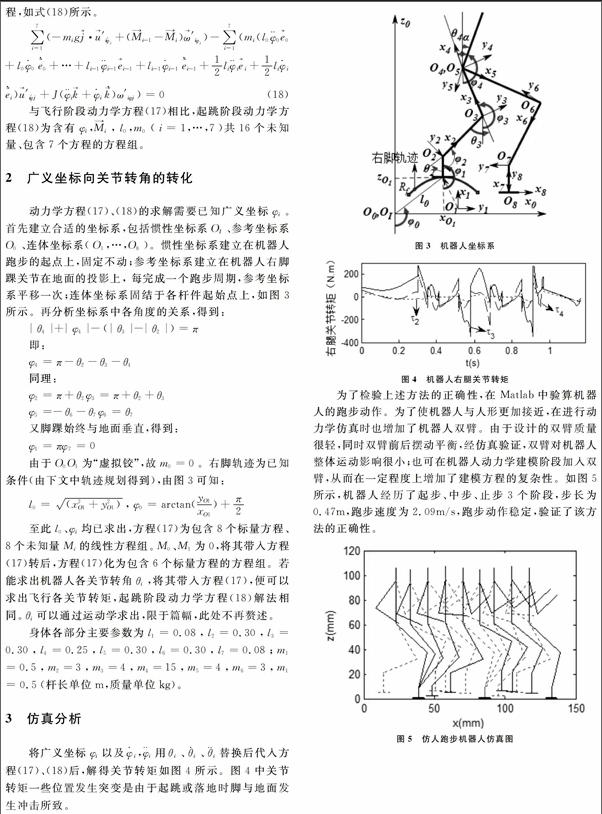
為了檢驗上述方法的正確性,在Matlab中驗算機器人的跑步動作。為了使機器人與人形更加接近,在進行動力學仿真時也增加了機器人雙臂。由于設計的雙臂質量很輕,同時雙臂前后擺動平衡,經仿真驗證,雙臂對機器人整體運動影響很小;也可在機器人動力學建模階段加入雙臂,從而在一定程度上增加了建模方程的復雜性。如圖5所示,機器人經歷了起步、中步、止步3個階段,步長為0.47m,跑步速度為2.09m/s,跑步動作穩定,驗證了該方法的正確性。
4 結語
本文基于“虛擬鉸”概念解決了跑步機器人在飛行階段由無根多剛體系統向有根多剛體系統的轉變,建立了跑步機器人的Kane動力學方程,通過運動學量向廣義坐標的轉換,實現了對Kane的動力學逆解求解,并運用仿真驗證了Kane方法的正確性和有效性。本文提出的Kane動力學建模方法簡單高效,易于進行計算機求解,解決了以往動力學建模方法繁瑣或建模精度不高的問題,為跑步機器人控制提供了理論基礎。
參考文獻:
[1]PARK J, KIM Y K, YOON B, et al.Design of biped robot inspired by cats for fast running[J].EIectronics Letters, 2014, 50(10): 730-731.
[2]MARC H RAIBERT.Legged robots that balance[M].The MIT Press,1986.
[3]SULLIVAN T, SEIPEL J.3D dynamics of bipedal running: effects of step width on an amputee-inspired robot[C].Intelligent Robots and Systems (IROS 2014), 2014 IEEE/RSJ International Conference on, 2014: 939-944.
[4]AMAGATA Y, NAKAURA S, SAMPEI M.The running of humanoid robot on uneven terrain utilizing output zeroing[C].SICE Annual Conference, 2008: 2841-2846.
[5]CHO B K, KIM J H, OH J H.Online balance controllers for a hopping and running humanoid robot[J].Advanced Robotics, 2011, 25(9-10): 1209-1225.
[6]彭勝軍, 稅海濤, 馬宏緒.仿人跑步機器人穩定性與控制策略研究進展[J].控制工程, 2011, 18(1): 142-146.
[7]NIIYAMA R, NISHIKAWA S, KUNIYOSHI Y.Biomechanical approach to open-loop bipedal running with a musculoskeletal athlete robot[J].Advanced Robotics, 2012, 26(3-4): 383-398.
[8]YANG K, WANG X.A dynamic model of ROV with a robotic manipulator using kane's method[C].Measuring Technology and Mechatronics Automation, 2013 Fifth International Conference on,2013:9 -12.
[9]魏航信.仿人跑步機器人快速跑步研究[D].西安:西安電子科技大學, 2006.
[10]魏航信, 劉明治.仿人型跑步機器人矢狀面跑步運動的實現[J].機器人, 2006, 28(1): 5-9.
[11]顧巖秀, 華云松.雙足載人機器人的結構設計及高度優化[J].電子科技, 2016,29(2):77-80.
[12]SHAFEI H R, BAHRAMI M, KAMALI A.Recursive kane formulation for deriving the equations of motion a chain of robotic arms[C].Robotics and Mechatronics (ICRoM), 2014 Second RSI/ISM International Conference on.IEEE, 2014: 393-398.
(責任編輯:黃 健)
