電控空氣懸架系統參數自整定模糊PID控制
2017-07-18 10:56:53曹愷王韋韋陳黎卿董威望
山東交通學院學報 2017年2期
曹愷,王韋韋,陳黎卿*,董威望
(1.安徽農業大學工學院,安徽合肥 230036;2.佳通輪胎(中國)投資有限公司 技術研發部,安徽合肥 230601)
電控空氣懸架系統參數自整定模糊PID控制
曹愷1,王韋韋1,陳黎卿1*,董威望2
(1.安徽農業大學工學院,安徽合肥 230036;2.佳通輪胎(中國)投資有限公司 技術研發部,安徽合肥 230601)
提出電控空氣懸架(Electronically Controlled Air Suspension,ECAS)的參數自整定模糊PID控制策略,設計參數自整定模糊PID控制器。利用AMESim軟件建立1/4電控空氣懸架系統模型,采用Matlab/Simulink和AMESim在不同路面、不同車速下對空氣懸架系統分別進行PID控制與參數自整定模糊PID控制策略下的聯合仿真。仿真結果表明:與PID控制仿真比較,采用參數自整定模糊PID控制策略使電控空氣懸架的性能指標得到顯著改善。搭建1/4電控空氣懸架試驗臺,利用電液伺服激振臺進行激勵加載,完成硬件在環實時仿真測試,試驗結果證明采用參數自整定模糊PID控制能有效提高懸架的總體性能。
ECAS;聯合仿真;硬件在環;參數自整定模糊PID控制
ECAS系統主要由懸架ECU、控制執行器及傳感器組成。汽車行駛過程中,傳感器實時測量車身、車輪的運動狀態信號,懸架ECU對各傳感器采集的信號進行判斷,并通過執行機構對空氣彈簧的剛度和車身高度進行調節,以改善汽車的行駛平順性和操作穩定性[1-2]。在整個ECAS系統的運行過程中,控制系統是影響懸架系統性能的最關鍵因素。本文利用AMESim中的機械、氣動元件建立1/4車輛空氣懸架系統,設計PID控制器和參數自整定模糊PID控制器,基于AMESim/Matlab軟件,分別采用PID控制和參數自整定模糊PID控制對電控空氣懸架進行聯合仿真,以驗證參數自整定模糊PID控制提高懸架整體性能的有效性[3-4]。
1 1/4電控空氣懸架系統模型
車輛行駛過程中,考慮到簧載質量和非簧載質量之間有垂直向上、向下2個方向的力,而AMESim中沒有符合要求的空氣彈簧元件,因此可以利用AMESim中的活動缸體活塞和可變氣室容積裝置模型進行組合設計,建立帶附加氣室的空氣彈簧仿真模型,并對空氣彈簧內的氣體初始壓力和初始溫度等參數進行設置[5]。使用電磁閥連接空氣彈簧主氣室和附加氣室,通過對電磁閥開口量的控制實現對主、輔氣室之間氣流的調節。利用AMESim中的機械、氣動部分建立車輛的二自由度1/4空氣懸架系統模型,模型如圖1所示,模型主要參數如表1所示。
2 參數自整定模糊PID控制
2.1控制原理
在常規PID控制器的基礎上加入模糊控制器和參數修正,同時加入采用模糊集表示控制規則的條件與操作,把模糊控制規則的相關信息保存到計算機的知識庫中,計算機根據控制系統的實際響應運用模糊推理,自動對PID參數進行最佳設定[6-7]。ECAS參數自整定模糊PID控制系統原理如圖2所示。1)加速度傳感器采集到的車身垂直方向的振動加速度信號ar(t)與給定的車身垂直加速度初始信號a0(t)經差分器后,輸出車身垂直加速度均方根偏差信號ac(t)與車身垂直加速度均方根偏差變化率信號acb(t),這兩個信號作為模糊控制器和PID控制器的輸入信號。2)模糊控制器把采集到的輸入量模糊化,依據模糊邏輯決策和模糊控制規則,應用模糊邏輯推理輸出ΔKp、ΔKi、ΔKd;3)經過修正過的Kp、Ki、Kd輸入至PID控制器,根據PID控制算法的離散化計算,最后得到模糊自整定PID控制器的輸出電信號u(t),該電信號通過電磁閥對空氣懸架系統進行控制[8-9]。
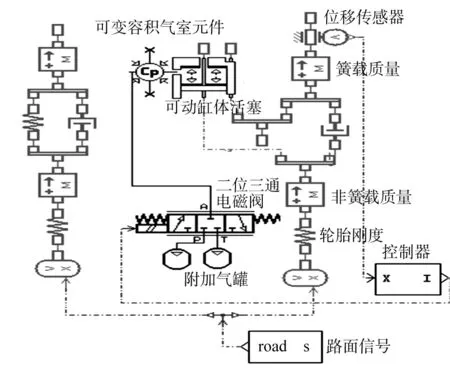
圖1 1/4車輛電控空氣懸架系統模型
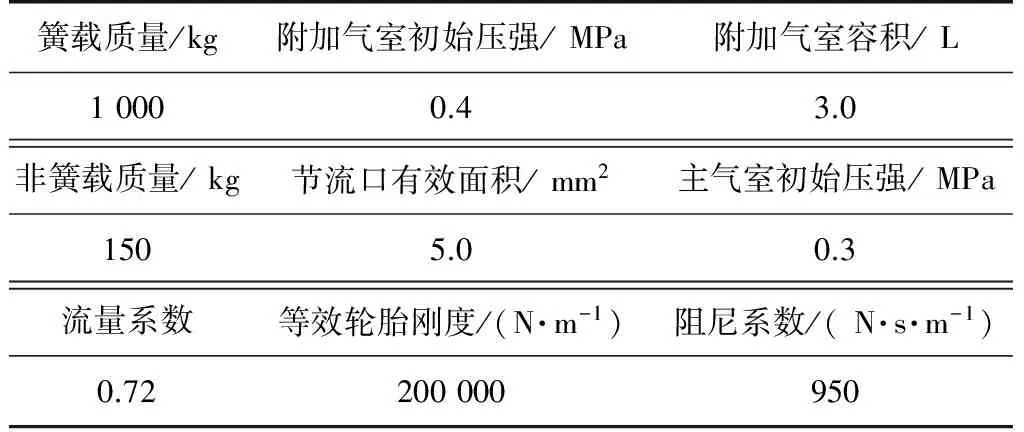
表1 1/4車輛電控空氣懸架系統模型主要參數

圖2 ECAS參數自整定模糊PID控制系統原理圖
2.2參數自整定模糊PID控制器的設計
2.2.1 輸入與輸出變量
車輛電控空氣懸架性能指標包括車身垂直方向上的振動加速度、懸架動行程和輪胎動載荷[10],本文假設懸架動行程和輪胎動載荷一定,以車身垂直方向的振動加速度均方根作為評價指標,則
ac=as-aa,
acb=dac(t)/dt,
式中:as為加速度均方根給定值;aa為加速度均方根實際值。
本文選取ac和acb為模糊控制器的輸入變量[11],把Kp、Ki和Kd的變化量△Kp、△Ki和△Kd作為模糊控制器的輸出變量,經參數修正后輸出
Kp=Kp0+γpΔKp,
Ki=Ki0+γiΔKi,
Kd=Kd0+γdΔKd,
式中:Kp0、Ki0和Kd0分別為ΔKp、ΔKi和ΔKd的初始量;γp、γi和γd為校正系數。
根據PID控制算法的離散化計算,得到參數自整定模糊PID控制器的輸出

(4)
2.2.2 輸入量的論域和比例因子
通過試驗選取本控制系統輸入變量ac和acb的模糊論域為[6,-6],控制變量ac、acb、Kp、Ki及Kd采用7個語言模糊子集(將輸入、輸出變量進行模糊化,7個模糊子集分別為PB( 正大)、PM( 正中)、PS( 正小)、Z(零)、NS( 負小)、NM( 負中)、NB( 負大)。由于本文有ac、acb2個輸入變量,因而選用二位模糊控制器,輸入輸出均選取{NB,NS,Z,PS,PB}5個語言值,Kp、Ki、Kd的模糊子集{NB,NS,Z,PS,PB}通過量化因子將ac和acb離散后與模糊論域對應[12-13]。ac、acb的量化因子[14]分別為

(5)
式中:nac、nacb為模糊級數,通常取nac=nacb=6;取Kac=7.8,Kacb=1.2[15-16]。
2.2.3 模糊控制規則
根據懸架系統車身垂直方向振動加速度的變化規律,模糊推理采用Max-min模型。
1)當|ac|較大時,取較大的Kp和較小的Kd可以使系統具有較好的跟蹤性能,同時為了避免系統響應出現較大的超調,要限制積分作用,取較大Ki。
2)當|ac|處于中等時,取較小的Kp,適當的Ki和Kd(特別是Kd的取值對系統的響應影響較大)可以使系統響應具有較小的超調性能。
3)當|ac|較小時,Kp和Ki均應取大些,可以使系統具有較好的穩定性。同時為了避免系統在設定值附近出現振蕩,當|acb|值較小時,Kd可取大一些。
4)當|acb|值較大時,Kd應取較小值,此時Kd為中等大小。
模糊控制規則表如表2[17]所示。
表2 模糊控制規則表
3 AMESim與Matlab/simulink聯合仿真
參數自整定模糊PID控制器是利用模糊邏輯算法并根據一定的模糊規則對PID控制的比例、積分、微分關系進行實時優化,以達到較為理想的控制效果,包括參數模糊化、模糊規則推理、參數解模糊、PID控制器等幾個重要部分,本文的參數自整定模糊PID控制器模塊圖如圖3所示。用圖3代替圖1中的“控制器”,應用AMESim / Matlab軟件建立基于自整定模糊PID控制的1/4車輛電控空氣懸架聯合仿真模型。設定懸架模型參數:簧上質量ms=1 000 kg,簧下質量mu=150 kg,輪胎剛度kt=750 kN/m,空氣彈簧剛度ks=2 000 kN/m。設汽車以80 km/h 的車速在B級路面行駛和以60 km/h的車速在 C級路面上行駛,分別采用參數自整定模糊PID控制和PID控制對電控空氣懸架進行AMESim/Matlab聯合仿真,路面輸入采用濾波白噪聲。當車輛以80 km/h車速行駛在B級路面時,懸架的時間歷程響應如圖4所示,車輛以60 km/h車速行駛在C級路面時,懸架的時間歷程響應如圖5所示。2種車速和路面行駛工況下車身平順性指標對比如表3所示。
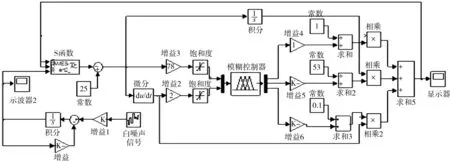
圖3 參數自整定模糊PID控制器模塊圖
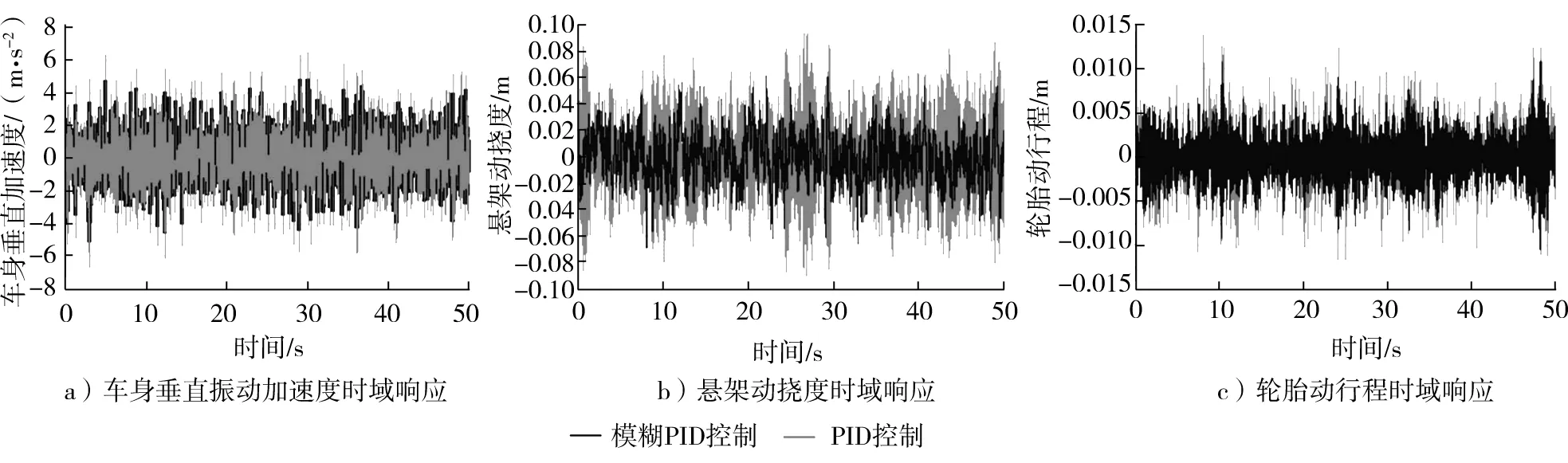
圖4 80 km/h B級路面時的時域響應曲線

圖5 60 km/h C級路面時的時域響應曲線
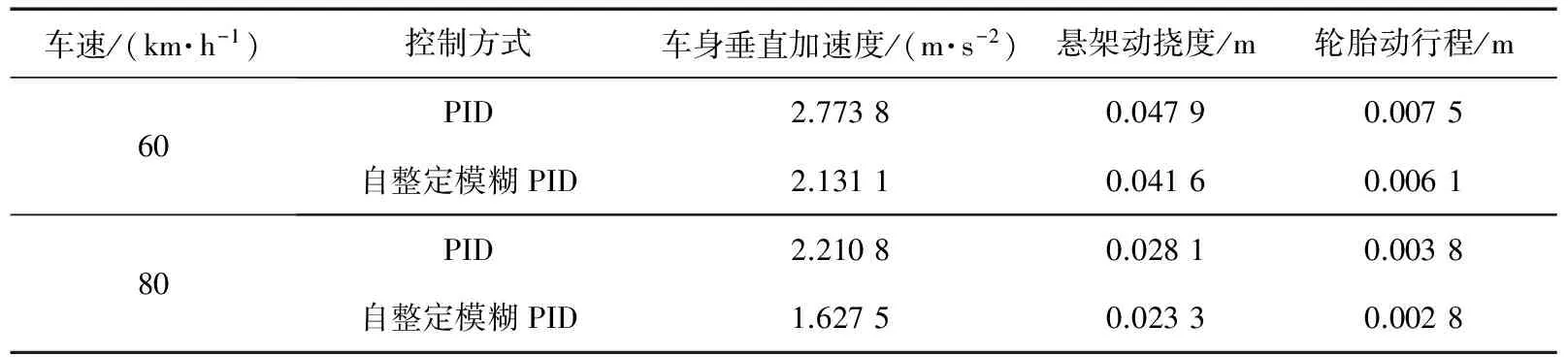
表3 不同路面與車速行駛工況下車身平順性指標的均方根
由表3可知,車輛以60 km/h的車速行駛在B級路面上,采用自整定模糊PID控制時,車身的垂直振動加速度、懸架動行程、輪胎動載荷分別比采用傳統PID控制時降低了23.17%、13.15%、18.66%;車輛以80 km/h的車速行駛在C級路面上,采用自整定模糊PID控制時,車身的垂直振動加速度、懸架動行程、輪胎動載荷分別比采用傳統PID控制時降低了26.38%、17.08%、26.15%。
因此,采用參數自整定模糊PID控制策略,根據檢測到的ac、acb的值,采用模糊控制理論對PID的Kp、Ki、Kd實時整定,能達到衰減車身振動的效果,車輛平順性優于使用傳統的PID控制的懸架系統。
4 硬件在環試驗驗證
4.1硬件在環平臺搭建
為了驗證參數自整定模糊PID控制系統的有效性,搭建基于NI-PXI實時處理器的電控空氣懸架硬件在環試驗平臺[18]。試驗系統主要包括PC上位機、NI-PXI-8102實時控制器、控制器模型、執行器和1/4懸架試驗臺,如圖6所示。PC上位機主要用于運行基于NI Veristand和LabVIEW開發的硬件在環實時測試軟件系統,該軟件系統將轉化后的MATALAB/Simulink模型輸入到下位機PXI實時處理器中,同時對整個硬件在環平臺進行開關控制、參數調節、狀態激勵和數據監測等試驗管理[19]。

圖6 ECAS ECU硬件在環測試平臺
上、下位機通過NI-PXI-8102實時控制器進行通信,工作區Workspace主要用于控制模型運行,監測懸架簧上質量加速度等參數。硬件在環系統工作區面板如圖7所示。
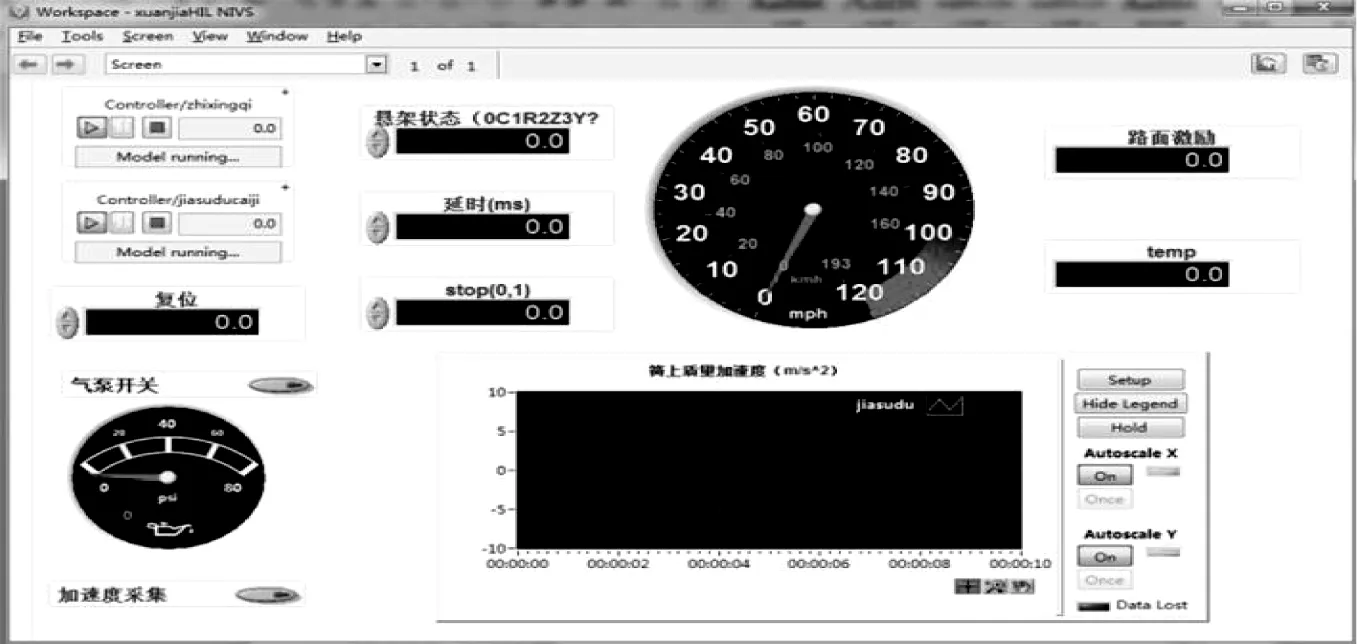
圖7 硬件在環系統工作區面板
4.2臺架試驗
試驗在圖8所示的臺架上進行。下位機將采集到的簧上質量加速度模擬信號發送給上位機,上位機對下位機傳送的信號進行參數自整定模糊PID運算,將運算得到的控制量輸入到下位機。改變懸架執行器開關電磁閥所處的位置,以驅動減振器的轉閥和空氣彈簧的連通閥,從而調節油液阻尼孔和空氣節流孔的尺寸面積,以改變減振器的阻尼和空氣彈簧的剛度,使懸架在“軟”、“中”和“硬”3個狀態之間自動轉換,從而達到改善電控空氣懸架系統性能的目的[20]。
4.3試驗結果
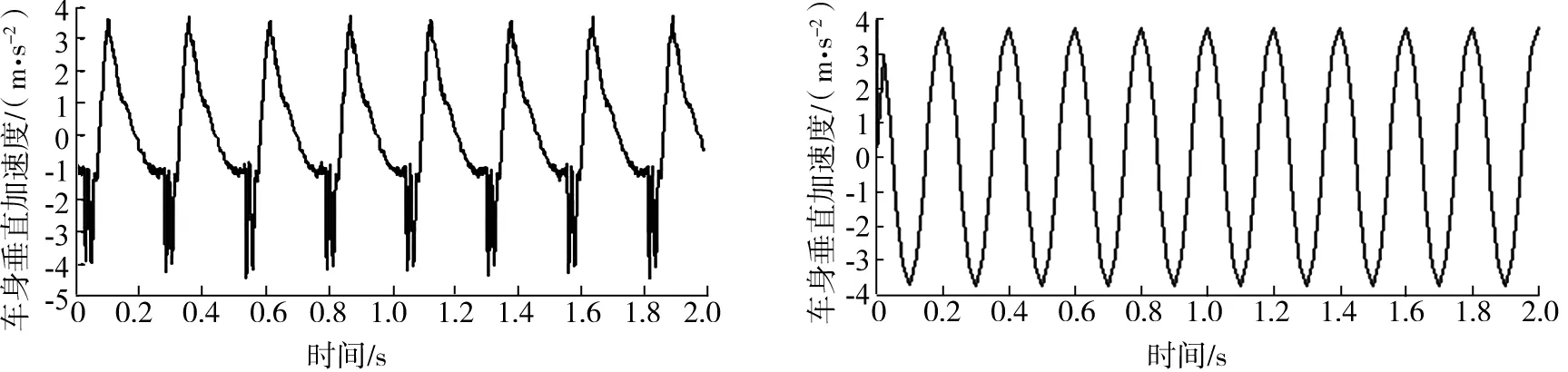
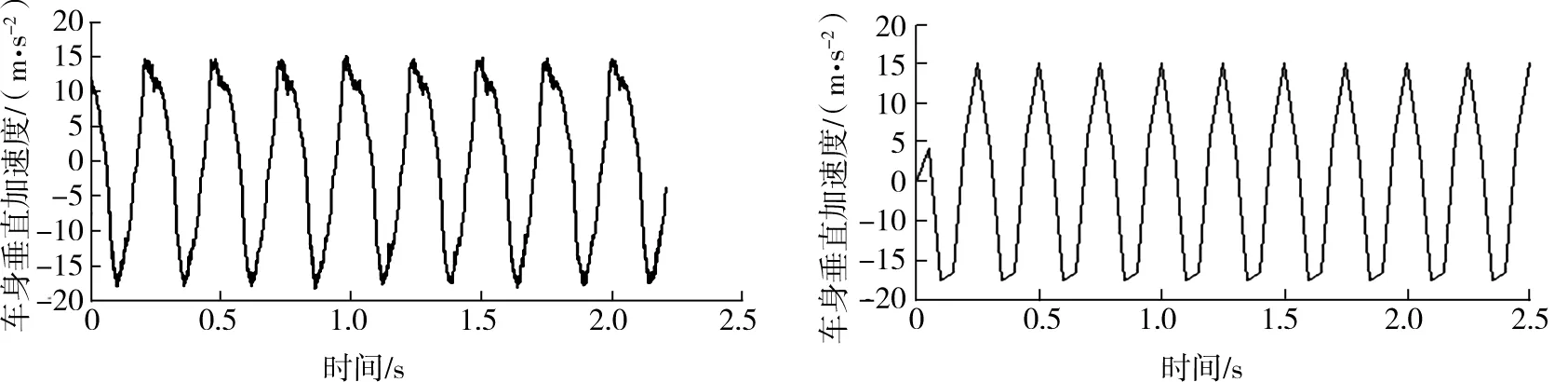
對1/4電控空氣懸架進行硬件在環試驗,由單通道電液伺服系統提供與仿真相同的正弦波激勵。分別選擇以下3種情況進行試驗與仿真:空氣懸架“軟”狀態,振幅10 mm,頻率2 Hz;空氣懸架“中”狀態,振幅20 mm,頻率2 Hz;空氣懸架“硬”狀態,振幅30 mm,頻率1.5 Hz。對比臺架試驗結果如圖9~11所示。兩種控制方式下懸架“中”狀態平順性指標的均方根如表4如示。

圖8 電控空氣懸架試驗臺架
a)臺架試驗 b)仿真圖9 空氣懸架“軟”狀態車身振動加速度曲線

a)臺架試驗 b)仿真圖10 空氣懸架“中”狀態車身振動加速度曲線
a)臺架試驗 b)仿真圖11 空氣懸架“硬”狀態車身振動加速度曲線

表4 正弦波激勵懸架“中”狀態平順性指標的均方根
由圖9~11及表4可知,采用參數自整定模糊PID控制時得到的車身垂直加速度、懸架動撓度和輪胎動行程的均方根比采用PID控制分別降低了17.11%、23.48%、15.78%,驗證了仿真結果的有效性。
5 結論
1)在不同的路面激勵工況下,對所建的1/4電控空氣懸架系統模型進行聯合仿真試驗,與采用傳統PID控制相比,參數自整定模糊PID控制通過調節懸架減振器的阻尼和彈簧的剛度,減小了車身在垂直方向上的加速度,改善了輪胎的動行程,大大提高了車輛的行駛平順性。
2)搭建硬件在環仿真測試系統,在電液伺服激振臺上,應用參數自整定PID控制器對1/4電控空氣懸架進行硬件在環測試,驗證了參數自整定模糊PID控制改善懸架總體性能的有效性。
[1]KIM Hyunsup,HYEONGCHEOL Lee.Height and leveling control of automotive air suspension system using sliding mode approach[J].IEEE Transactions on Vehicular Technology,2011,60(5):2027-2041.
[2]KIM Hyunsup,LEEHYONGHEO C.Model-based fault-tolerant control for an automotive air suspension control system[J].Proc MECHE,Part D:Journal of Automobile Engineering,2011,225(11):1462-1480.
[3]楊柳青,陳無畏,高振剛,等.基于電磁閥減振器的1/4主動懸架非線性控制[J].農業機械學報,2014,45(4):1-7. YANG Liuqing,CHEN Wuwei,GAO Zhengang,et al.Nonlinear control of quarter vehicle model with semi-active suspension based on solenoid valve damper[J].Transactions of the Chinese Society for Agricultural Machinery,2014,45(4):1-7.
[4]陳無畏,王其東,王志君,等.汽車半主動懸架的非線性神經網絡自適應控制研究[J].機械工程學報,2000,36(1):75-78 . CHEN Wuwei,WANG Qidong,WANG Zhijun,et al.Research on adaptive control for automotive semi-active suspensions based on nonlinear neural networks[J].Chinese Journal of Mechanical Engineering,2000,36(1):75-78.
[5]楊啟耀,周孔亢,張文娜,等.半主動空氣懸架Fuzzy-PID控制[J].農業機械學報,2008,39(9):24-29. YANG Qiyao,ZHOU Kongkang,ZHANG Wenna,et al.Fuzzy-PID control on semi-active air suspension[J].Transactions of the Chinese Society for Agricultural Machinery,2008,39(9):24-29.
[6]嚴天一,劉欣強,張魯鄒,等.基于代碼生成的電控空氣懸架系統電子控制單元[J].農業機械學報,2014,45(9):14-19. YAN Tianyi,LIU Xinqiang,ZHANG Luzou,et al.Electronic control unit of electronically controlled air suspension systems based on code generation[J].Transactions of the Chinese Society for Agricultural Machinery,2014,45(9):14-19.
[7]孫曉強,陳龍,汪少華,等.半主動空氣懸架阻尼多模型自適應控制研究[J].農業機械學報,2015,46(3):351-357. SUN Xiaoqiang,CHEN Long,WANG Shaohua,et al.Research on damping multi-model adaptive control of semi-active air suspension[J].Transactions of the Chinese Society for Agricultural Machinery,2015,46(3):351-357.
[8]曹青松,周繼惠,黎林,等.基于模糊自整定PID算法的壓電柔性機械臂振動控制研究[J].振動與沖擊,2010,29(12):181-186. CAO Qingsong,ZHOU Jihui,LI Lin,et al.Vibration control of piezoelectric flexible manipulator based on fuzzy self-tuning PID algorithm[J].Journal of Vibration and Shock,2010,29(12):181-186.
[9]BAO W N,CHEN L P,ZHANG Y Q,et al.Fuzzy adaptive sliding mode controller for an air suspension[J].International Journal of Automotive Technology,2012,13(7):1057-1065.
[10]黃俊明,周孔亢,徐興,等.電子控制空氣懸架高度調節過程非線性模型[J].機械工程學報,2009,45(6):278-283. HUANG Junming,ZHOU Kongkang,XU Xing,et al.Theoretical analysis and test research of eigen-frequency of air suspension[J].Journal of Mechanical Engineering,2011,47(14):114-120.
[11]陳龍,黃晨,江浩斌,等.基于懸架效用函數的車身姿態控制[J].農業機械學報,2011,42(8):15-19. CHEN Long,HUANG Chen,JIANG Haobin,et al.Body posture control base on suspension utility function[J].Transations of the Chinese Society for Agricultural Machinery,2011,42(8):15-19.
[12]汪若塵,孟祥鵬,施德華,等.車輛慣容器-彈簧-阻尼器半主動懸架模糊控制[J].農業機械學報,2013,44(12):1-5. WANG Ruochen,MENG Xiangpeng,SHI Dehua,et al.Fuzzy control of vehicle isd semi-active suspension[J].Transactions of the Chinese Society for Agricultural Machinery,2013,44(12):1-5.
[13]劉韶慶,姚斌,袁善發,等.磁流變減振器半主動懸架的Fuzzy-PID開關切換控制[J].農業機械學報,2006,37(12):4-7. LIU Shaoqing,YAO Bin,YUAN Shanfa,et al.Fuzzy-PID swith control on suspensions with MR damper[J].Transaction of the Chinese Society for Agricultural Machinery,2006,37(12):4-7.
[14]HIROSE Masanori,MATSSHIGEU Seiichi,BUMA Shuichi,et al.Toyota electronic modulated air suspension system for the 1986 soarer[J].IEEE Transactions on Industrial Electronics,2011,58(10):4866-4879.
[15]樂巍.車輛半主動懸架模糊控制方法的研究[D].鎮江:江蘇大學,2002. YUE Wei.Research on fuzzy control methods for semi-active suspension of vehicle[D].Zhenjiang:Jiangsu University,2002.
[16]中國農業機械化科學研究院.農業機械設計手冊[M].北京:中國農業科學技術出版社,2007.
[17]朱聰玲,程志勝,王洪源,等.聯合收獲機割臺振動問題研究[J].農業機械學報,2004,35(4):59-61. ZHU Congling,CHENG Zhisheng,WANG Hongyuan,et al.Study on the header vibration of combine[J].Transactions of the Chinese Society for Agricultural Machinery,2004,35(4):59-61.
[18]陶永華.新型PID控制及其應用[M].北京:機械工業出版社,2005.
[19]薛定宇.控制系統計算機輔助設計:MATLAB語言與應用[M].2版.北京:清華大學出版社,2006.
[20]GIORDANO Frank R.數學建模[M].北京:機械工業出版社,2003.
(責任編輯:楊秀紅)
FuzzyParameterSelf-TuningPIDControlofElectronically-ControlledAirSuspensionSystem
CAOKai1,WANGWeiwei1,CHENLiqing1,DONGWeiwang2
(1.CollegeofEngineering,AnhuiAgriculturalUniversity,Hefei230036,China; 2.TechnolgyDevelopmentDepartment,GitiTechnology(China)InvestmentCo.,Ltd.,Hefei230601,China)
This article presents the fuzzy parameter self-tuning PID control strategy of the electronically-controlled air suspension system (ECAS) to design the fuzzy parameter self-tuning PID controller. The AMESim software is used to establish the model of 1/4 ECAS system.Under different road and speed conditions, the Matlab/simulink and AMESim are used to make the co-simulation for the air suspension system in the strategies of the PID control and the fuzzy parameter self-tuning PID control.The simulation results show that the simulation in the fuzzy parameter self-tuning PID control strategy makes the performance indexes of the ECAS significantly improved compared with the PID control simulation. A test rig of 1/4 ECAS vehicle is developed to conduct the excitation loading through the electro-hydraulic servo vibration table and the hardware-in-the-loop (HIL) real-time simulation test.The test results verify that the fuzzy parameter self-tuning PID control can improve the overall performance of the suspension system effectively.
electronically-controlled air suspension (ECAS); co-simulation; hardware-in-the-loop; fuzzy parameter self-tuning PID control
2016-11-14
安徽省高校自然科學重點項目(KJ2015A305);安徽省自然科學基金(1308085QE94)
曹愷(1992—),男,碩士研究生,主要研究方向為汽車懸架設計與動力學分析,E-mail:1045428838@163.com.
*通訊作者:陳黎卿(1979—),男,教授,副院長,碩士生導師,主要研究方向為車輛系統動力學,E-mail:123@163.com.
10.3969/j.issn.1672-0032.2017.02.001
U463.33
:A
:1672-0032(2017)02-0001-08
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
