基于卡爾曼濾波算法的車輛振動狀態估計與最優控制研究*
2017-07-19 13:38:18鐘孝偉陳雙張不揚
汽車技術 2017年5期
鐘孝偉陳雙張不揚
(1.遼寧工業大學,錦州 121000;2.吉林大學,汽車仿真與控制國家重點實驗室,長春 130022)
基于卡爾曼濾波算法的車輛振動狀態估計與最優控制研究*
鐘孝偉1陳雙1張不揚2
(1.遼寧工業大學,錦州 121000;2.吉林大學,汽車仿真與控制國家重點實驗室,長春 130022)
在建立2自由度1/4車輛懸架振動模型基礎上,提出了利用卡爾曼濾波算法估計車輛行駛振動狀態的方法。通過設計卡爾曼濾波算法,對在不平路面上行駛車輛的車身垂向位移、垂向速度和車輪垂向位移、垂向速度狀態進行估計,并通過Matlab/Simulink對估計效果進行驗證。驗證結果表明,該方法能夠在不同路面、不同車速下準確估計車輛的相關參數,為汽車主動懸架的最優控制提供了基礎。
1 前言
主動懸架能根據汽車的行駛工況對懸架系統的剛度和阻尼特性進行動態自適應調節,使懸架系統始終處于最佳減振狀態。在主動懸架控制(特別是容錯控制)研究中,車輛的狀態估計至關重要,也是懸架控制器設計的基礎[1~2]。卡爾曼濾波算法是車輛系統狀態估計中比較經典的一種算法,如文獻[3]利用卡爾曼濾波算法對汽車橫向速度、橫擺角速度進行了估計,文獻[4]采用卡爾曼濾波算法對汽車縱向和側向速度進行估計,但目前對懸架狀態變量估計的研究較少。
針對汽車主動懸架最優控制中所需的狀態變量問題,本文建立了基于卡爾曼濾波算法的車輛振動狀態估計模型,用于估算車輛行駛在不平路面時的車身垂向位移、垂向速度、車輪垂向位移、垂向速度,為汽車主動懸架的最優控制提供基礎。
2 2自由度1/4車輛模型
建立2自由度1/4車輛懸架動力學模型[5],如圖1所示。定義x1為車身垂向位移,x2為車輪垂向位移,kt為輪胎等效剛度,m1為車身質量,m2為車輪質量,kf為彈簧剛度,cf為懸架阻尼系數,q為路面激勵。
頻域模型是廣泛采用的路面模型。路面不平度功率譜密度用指數函數擬合,在一般情況下,當車輛以速度v勻速行駛時,路面不平度功率譜密度表示為:


圖1 2自由度1/4車輛懸架模型
由式(1)可得單輪路面不平度的微分方程為:

式中,w(k)為k時刻系統噪聲,是均值為0的高斯白噪聲;n00=0.01/m為路面空間截止頻率。
根據牛頓運動定律,得到運動微分方程為[6]:

將式(1)、式(2)轉換為主動懸架狀態空間形式:

3 卡爾曼濾波算法
在工程實踐或控制研究中,受測量硬件成本過高等因素的影響,往往無法得到所需狀態變量的真實值,因此需要找到一種低成本且可靠的狀態估計方法。隨著計算機技術的發展,卡爾曼濾波算法越來越受到人們的青睞。
由于卡爾曼濾波算法將被估計的信號看作白噪聲作用下的一個隨機線性系統的輸出,并且其輸入、輸出關系是由狀態方程和輸出方程在時間域內給出的,因此,這種濾波方法不僅適用于平穩隨機過程的濾波,而且特別適用于非平穩或平穩馬爾科夫序列或高斯-馬爾科夫序列的濾波,所以其應用范圍十分廣泛。
卡爾曼濾波算法是一種時間域濾波方法,采用狀態空間描述系統。系統的過程噪聲和量測噪聲并不是需要濾除的對象,它們的統計特性正是估計過程中需要利用的信息,而被估計量和觀測量在不同時刻的一、二階矩卻是不必要知道的。卡爾曼濾波通過實時更新均值和協方差執行濾波過程,基于卡爾曼濾波的狀態估計實際上是基于狀態變化為一階馬爾科夫過程假設的“預測-校正”的反饋控制器[7]。卡爾曼濾波可分為時間更新過程(預測)和測量更新過程(校正)兩部分。時間更新過程根據當前時刻的系統狀態獲得對下一時刻的先驗估計,測量更新過程將測量和先驗估計相結合,獲得改進的系統后驗估計[6~8]。
首先建立包含被估計狀態量的車輛動力學系統數學模型:

式中,x(k)、x(k-1)分別為k和(k-1)時刻的狀態矢量;y(k)為k時刻的觀測矢量。
由于系統是線性的,且系統噪聲是高斯分布的,容易得出卡爾曼濾波算法的時間更新和測量更新方程[9]。
a.濾波時間更新
狀態預測方程為:

誤差協方差預測:

式中,Q(k)為系統噪聲的協方差;P(k|k-1)為先驗狀態估計下的協方差的傳播形式,即先驗狀態估計下的協方差的時間更新表達式。
b.濾波測量更新
增益方程為:

濾波方程為:

后驗狀態估計下的誤差協方差一步更新表達式為:

式中,I為適維單位矩陣;kg即為所求的卡爾曼濾波增益。
4 狀態估計結果分析
本文采用的卡爾曼濾波狀態估計流程如圖2所示。車輛參數如表1所示。

圖2 卡爾曼濾波狀態估計流程

表1 車輛模型參數
在Matlab/Simulink中搭建卡爾曼濾波算法模型,分別對B級路面70 km/h車速工況下和C級路面40 km/h車速工況下的車輛振動狀態進行估計,估計值與仿真值的對比如圖3、圖4所示。

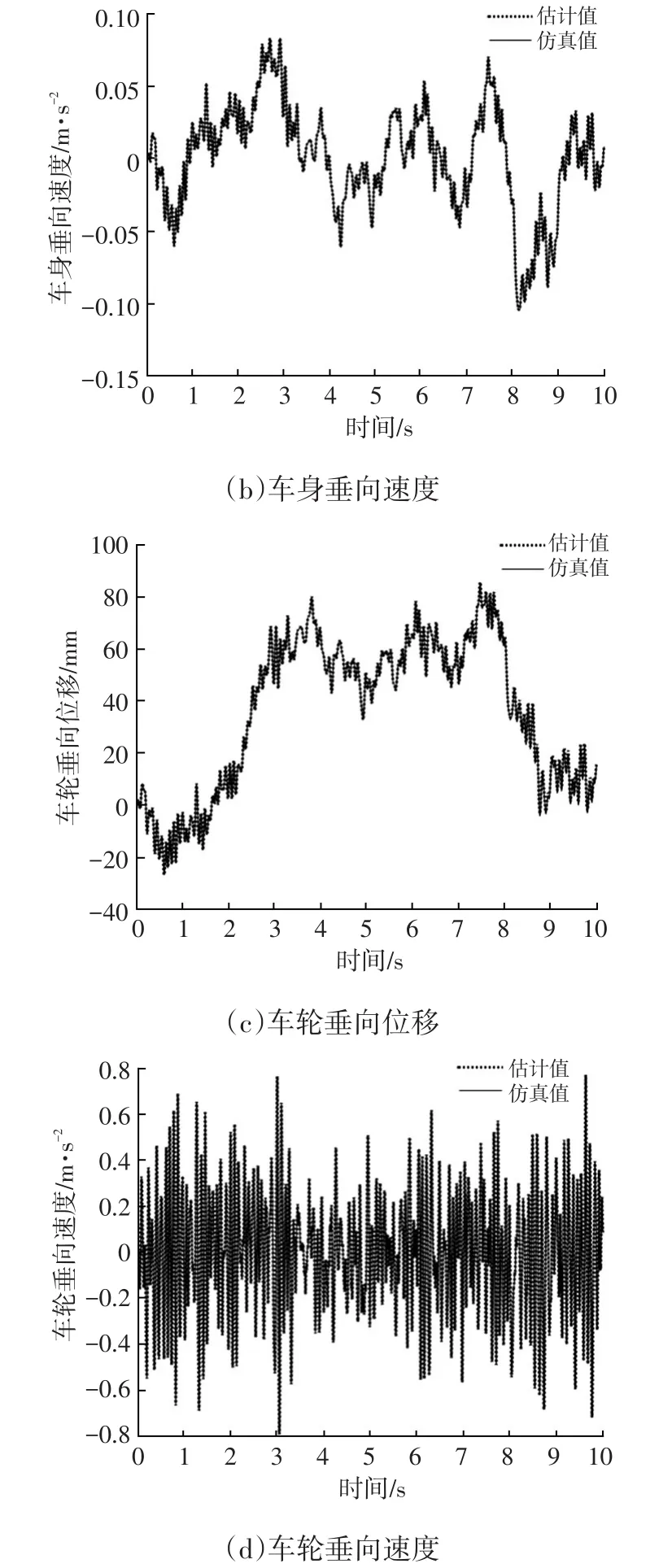
圖3 B級路面70 km/h車速工況下車輛振動狀態估計值與仿真值
由圖3、圖4可以看出,所設計的卡爾曼濾波算法能夠較好地對不同等級路面、不同車速狀態下的懸架狀態變量進行估計,車身垂向速度和車輪垂向速度估計結果重合度很高。雖然車身位移和車輪位移估計結果存在一定的偏差,但與仿真結果趨勢完全一致。各狀態變量估計誤差值見表2。

表2 狀態量估計誤差 %

圖4 C級路面40 km/h車速工況下車輛振動狀態估計值與仿真值
由表2可以看出,兩種工況下懸架狀態變量估計值均方根誤差均較小,可用于懸架最優控制。
5 基于狀態估計的懸架最優控制
在圖1的基礎上將其改為主動懸架,車輛模型如圖5所示,其中,u為作動器控制力。

圖5 2自由度1/4車輛主動懸架模型
根據牛頓運動定律,主動懸架運動微分方程為[5]:
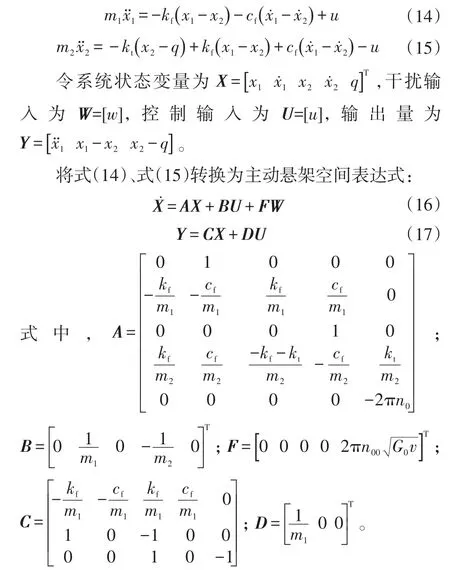
對主動懸架采用線性二次型最優控制[10],其中懸架的狀態變量均采用卡爾曼算法估計值,考慮到汽車行駛平順性、操縱穩定性和降低能耗的要求,選取車身垂向加速度、懸架動撓度(x1-x2)、輪胎動行程(x2-q)和控制輸入u作為性能評價指標。采用狀態調節器,其指標泛函為:

整理成標準二次型形式:

式中,q1、q2、q3、q4為性能評價指標的加權系數。
在 Matlab中調用 LQG工具箱,求得控制率[K,S,e]=lqr(A,B,Q,R,N),K即為所求的最優反饋控制率,改變q1、q2、q3、q4的值,反復調試,直到出現良好的控制效果,得到q1=10 000、q2=100、q3=100、q4=0.085。
在Matlab/Simulink中搭建車輛模型,對采用估計的狀態變量設計的LQG控制器進行仿真驗證,控制效果如圖6所示,各性能指標結果如表3所示。

圖6 仿真驗證結果
由仿真驗證結果可知,在基于卡爾曼的LQG控制下,車身垂向加速度降低了29.87%,懸架動撓度增加了17.99%,輪胎動行程增加了33.04%。最優控制較大程度地降低了車身垂向加速度,因此,造成懸架動撓度稍有增加,同時也犧牲了一部分輪胎動行程。

表3 主、被動懸架性能響應對比
6 結束語
a.采用的卡爾曼濾波算法能夠很好地對車輛懸架振動的狀態變量進行估計,且在不同車速、不同路面下均有較好的可靠性,可用于汽車主動懸架控制。
b.在主動懸架最優控制基礎上,由卡爾曼算法估計出的狀態變量可代替傳感器測量值,可滿足預期的控制效果,且降低了成本。
c.設計的卡爾曼濾波算法還可以用于控制系統故障檢測與診斷,為主動懸架容錯控制提供信息,提高控制的可靠性。
1 張俊智,王麗芳,葛安林,等.汽車容錯控制技術.汽車技術,1997(2):56~59.
2 聞新,張洪鉞,周露.控制系統的故障診斷與容錯控制.北京:機械工業出版社,1998.
3 包瑞新,賈敏,Sabbioni E,等.基于擴展Kalman粒子濾波的汽車行駛狀態和參數估計.農業機械學報,2015,46(2):301~306.
4 時艷茹.基于UKF濾波的汽車縱向和側向速度估計算法研究:[學位論文].長春:吉林大學,2011.
5 喻凡,林逸.汽車系統動力學.北京:機械工業出版社,2014.
6 蘆冰,解小華,蔡可天,等.UKF車速估計器的算法研究與仿真.吉林大學學報:信息科學版,2015,33(1):7~11.
7 Simon D.最優狀態估計.北京:國防工業出版社,2013.
8 李剛,趙德陽,解瑞春,等.基于改進的Sage-Husa自適應擴展卡爾曼濾波的車輛狀態估計.汽車工程,2015,37(12):1426~1432.
9 張嗣瀛,高立群.現代控制理論.北京:清華大學出版社,2006.
(責任編輯 斛 畔)
修改稿收到日期為2017年3月27日。
Research on State Estimation and Optimal Control of Vehicle Vibration Based on Kalman Filter Algorithm
Zhong Xiaowei1,Chen Shuang1,Zhang Buyang2
(1.Liaoning University of Technology,Jinzhou 121000;2.State Key Laboratory of Automotive Simulation and Control, Jilin University,Changchun 130022)
Based on the establishment of the two-degree-of-freedom 1/4 vehicle active suspension vibration model, the method to estimate vehicle vibration state by using Kalman filter algorithm was proposed.The vertical displacement and vertical velocity of the body and wheel of vehicles on uneven road surface were estimated by the design of the Kalman filter algorithm,and the estimation effect was verified by Matlab/Simulink.The results show that the proposed Kalman filter algorithm can accurately estimate the relevant vehicle parameters at different speeds and on different road surfaces, providing foundation for the optimal control of active suspension.
Automobile suspension,State estimation,Kalman filter
汽車懸架 狀態估計 卡爾曼濾波
U461.4
A
1000-3703(2017)05-0014-05
國家自然科學基金項目(51605213);遼寧省科技廳項目(201602367);遼寧省教育廳科學研究項目(L2015227)。
陳雙(1979—),女,遼寧錦州人,博士,副教授,研究方向為車輛系統動力學及控制,cslxy74@163.com。
猜你喜歡
汽車與安全(2019年9期)2019-11-22 09:48:03
測控技術(2018年12期)2018-11-25 09:37:34
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
作文大王·低年級(2016年4期)2016-04-18 00:24:37
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
電子設計工程(2015年13期)2015-02-27 12:06:43
決策探索(2014年21期)2014-11-25 12:29:50
