STM32帕爾貼加熱器軟件的模塊化設計
2017-07-31 21:57:23熊偉耿瑯環
單片機與嵌入式系統應用 2017年7期
熊偉,耿瑯環
(西安工程大學 電子信息學院,西安 710048)
STM32帕爾貼加熱器軟件的模塊化設計
熊偉,耿瑯環
(西安工程大學 電子信息學院,西安 710048)
為解決市面上醫用加熱器成本較高、智能化程度較低、安全性較低的問題,本文設計一種基于STM32微控器的帕爾貼加熱器。使用較為常見的帕爾貼熱電半導體制冷器件和STM32微控器,針對帕爾貼加熱和制冷雙功能特性,搭建兩路以4個場效應管為基礎元器件的H橋電路作為驅動電路,實現智能化溫度控制以及按鍵控制多功能并顯示,體現了人性化設計。另外,對系統各個模塊進行模塊化編程,使用μC/OS-II和PID優化控制算法,不僅實現脫機工作,而且很大程度上提高了系統的穩定性、精確性和實用性。
STM32;帕爾貼;H橋驅動電路
引 言
隨著科技地不斷進步、經濟飛速發展,人們的生活質量在不斷提高,平均壽命得到很大改善,中國在一步一步地走向老齡化社會,市場對于醫療設備與服務的保障提出了更高的要求。市面上大多數加熱器采用發熱管或PTC熱敏電阻作為發熱器件,只有加熱功能,而帕爾貼熱電半導體制冷片,不僅可以實現加熱的功能,還可以快速降溫,達到制冷的效果。由于帕爾貼熱電半導體制冷片工作方向都是由繼電器控制,此方案的缺點無法消除機械噪聲,并且會縮短帕爾貼的使用壽命,所以有必要設計一種既安全又可靠的環保型驅動電路。
醫療設備的設計除了要考慮便攜性、安全性,還要注重智能化、產業化。本設計采用改進的H橋驅動電路,加入了轉換電壓電路保護功能,極大程度降低了安全風險。采用性價比高的STM32作為控制核心芯片,與以往的HT46R 47控制芯片相比,配置更加豐富,使用更加靈活,順應了當代電子產品設計低功耗的潮流。軟件設計程序使用μC/OS-II操作系統,可以更好地管理芯片內存,實用性較強。
1 硬件設計
1.1 硬件總體結構
本系統硬件主要由STM32、H橋驅動電路和電源電路組成,STM32作為控制主芯片,外圍電路有雙H橋驅動模塊、帕爾貼散熱模塊、溫度采集模塊、電源電路模塊、顯示模塊及按鍵選擇模塊,主芯片控制各個模塊之間信號的傳遞與通信。加熱器是利用帕爾貼效應實現加熱或者制冷的,當電流流經兩個不同導體形成的接點時,接點處會產生放熱和吸熱現象,放熱或吸熱大小由電流的大小來決定,本設計使用改進的H橋電路對帕爾貼半導體制冷片的方向進行控制。試劑從冷庫里取出來,放在加熱器上面,有2個按鈕,1個按鈕控制一路帕爾貼。按下按鈕,加熱器從37 ℃加熱到65 ℃,然后從65 ℃降溫到37 ℃,最后保持恒溫37 ℃。每一路帕爾貼熱電半導體制冷片上下各放置一個風扇,供其散熱。其硬件結構圖如圖1所示。
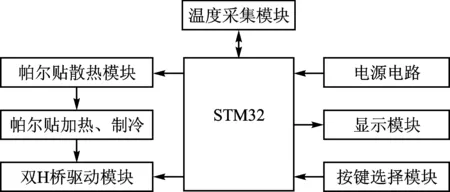
圖1 系統硬件結構圖
1.2 H橋驅動電路
H橋電路一般用于控制直流電機反轉方向,簡單的H橋電路由2個P型場效應管Q1B、Q2B與2個N型場效應管Q3A、Q4A組成,如圖2所示。P型管在高電平時關閉;N型管在柵極高電平時導通,低電平時關閉,場效應管是電壓控制型元件,柵極通過的電流幾乎為“零”,4個場效應晶體管中間為帕爾貼加熱或制冷輸出。

圖2 H橋電路基本原理電路圖
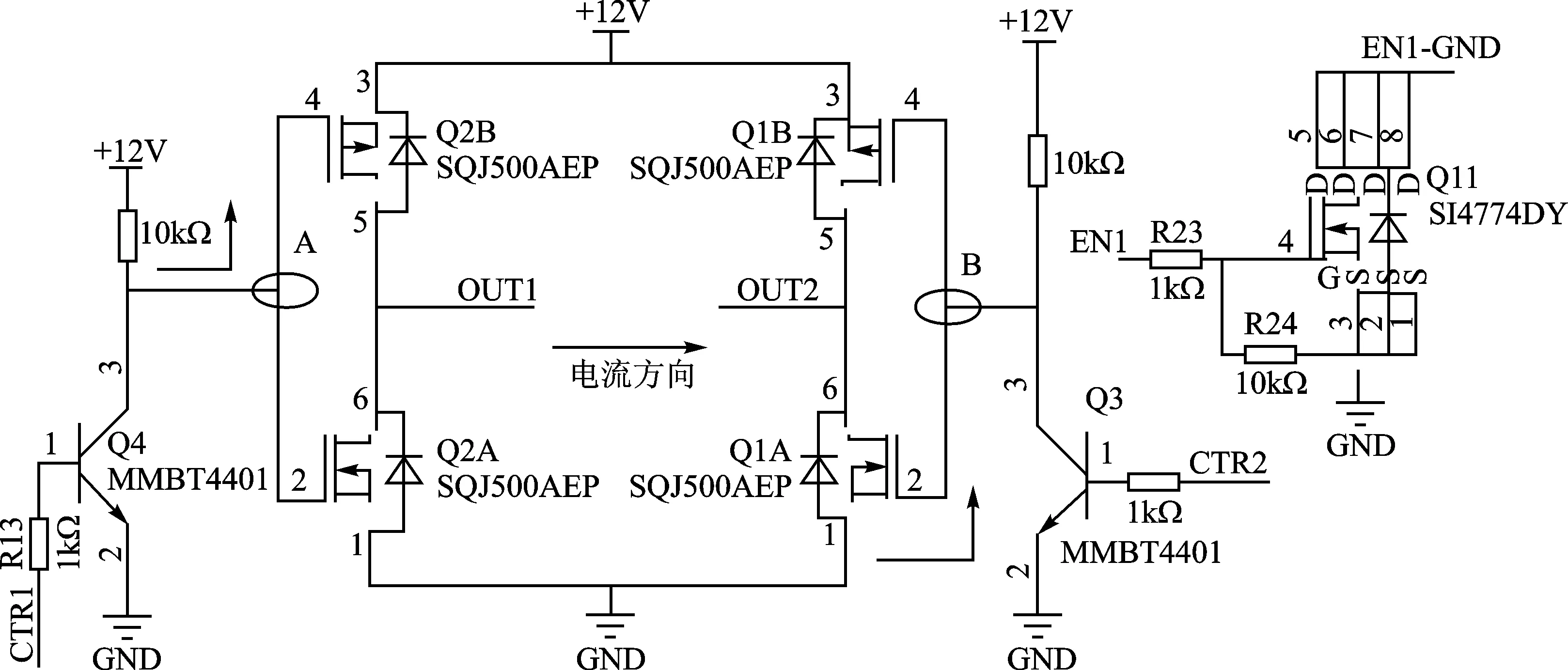
圖3 改進H橋式驅動加熱狀態
本設計的改進H橋式驅動電路,要使OUT1與OUT2之間有電流通過,必須使對角線上的一對場效應晶體管導通。改進H橋式驅動加熱狀態如圖3所示,給CTR1高電平,Q4導通,A點相當于接地,為0 V,Q2B為P型場效應管,柵極低電平時導通,Q2A為N型管,在柵極低電平時截止,則OUT1為12 V。同理給CTR2低電平,Q3截至,B點為12V,Q1A為N型場效應管,此時為導通狀態,Q1B為P型場效應管,此時為截止狀態,OUT 2為0 V,所以電流從OUT1流向OUT2,OUT1和OUT2之間為帕爾貼元件,此時帕爾貼呈加熱狀態。
反之,給CTR1低電平,Q4截止,A點相當于12 V,Q2B為P型場效應管,柵極高電平時截止,Q2A為N型管,在柵極高電平時導通,則OUT1為0 V。若給CTR2高電瓶,Q3導通,B點接地為0 V,Q1A為N型場效應管,此時為截止狀態,Q1B為P型場效應管,此時為導通狀態,OUT 2為12 V,所以電流從OUT2流向OUT1,此時帕爾貼呈制冷狀態,如圖4所示。Q2B和Q2A導通和截止相互切換的過程當中,元器件電流變換有可能產生的惰性,為了防止短路,減小損傷元器件的風險,設計中加入EN1使能端電路。系統運行,先給CTR1、CTR2高低電平,然后打開EN1,整個系統具有較高的安全系數。
2 軟件設計
2.1 μC/OS-II實時操作系統
μC/OS-II是一個實時操作系統內核,它僅僅包含了任務調度、任務管理、時間管理、內存管理和任務間的通信和同步等基本功能。此操作系統不僅最多可以支持256個任務,功能擴展性強,而且可以很好地保證系統的實時性,對優先級最高的任務或中斷能夠及時處理,提高整個系統的效率。帕爾貼加熱器的整體程序是通過在μC/OS-II實時操作系統上添加相應的任務來實現的,這里的三個任務分別是按鍵選擇、帕爾貼加熱(或者制冷控制)以及LED顯示,它們是通過信號量和消息列隊進行同步和通信的。操作系統對3個模塊的程序分別進行控制和調度,如圖5所示。

圖4 改進H橋式驅動制冷狀態
2.2 溫度控制程序
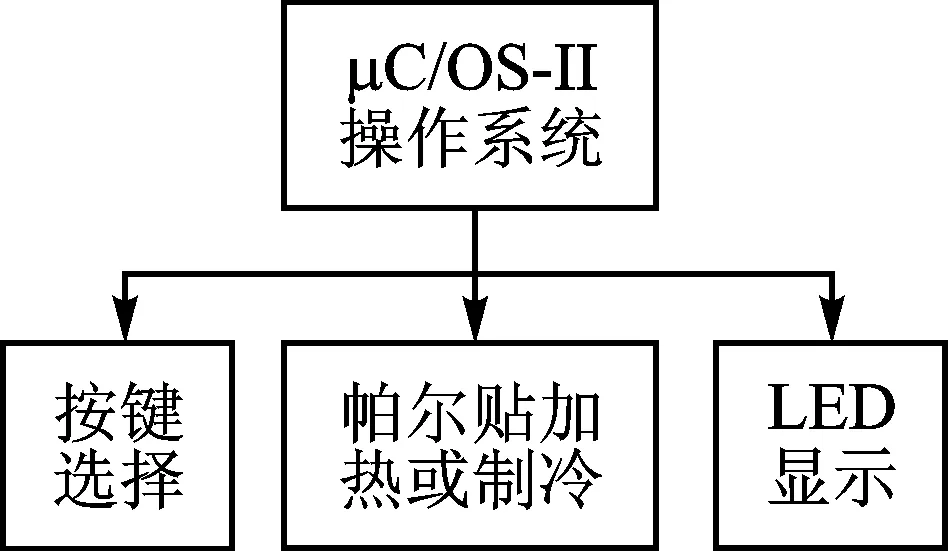
圖5 μC/OS-II操作系統設計框架
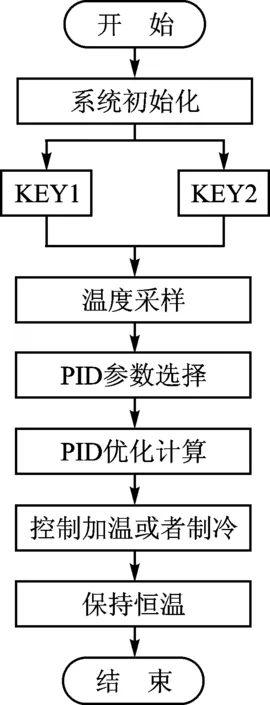
圖6 系統軟件主程序流程
整個系統軟件溫度控制程序包括初始化、按鍵選擇、溫度采集、優化PID溫度控制算法、驅動電路的控制。上電初始化完成之后,等待按鍵選擇一路加熱器進行加熱操作。系統設計將10個加熱槽進行加熱處理,分為兩組,每組加熱操作對應一個按鍵,若是觸發KEY1將對第一組的 5個加熱槽同時處理,若是觸發KEY2將對第二組的5個加熱槽同時處理。每一路加熱槽的試劑將從37 ℃加熱到65 ℃,然后從65 ℃降溫到37 ℃,最后一直保持恒溫37 ℃。軟件主程序流程如圖6所示。
2.3 PID控制優化算法
PID控制即為調制器控制規律為比例、積分、微分控制。由于本系統是閉環控制系統,且采用數字PID控制算法控制,最終公式如下:

該系統的帕爾貼加熱或制冷過程具有時滯特性的一階慣性環節,傳統的數字PID溫度控制算法無法解決精確加溫到65 ℃。為了防止PID控制反應過慢,導致過加熱和過冷卻,設計中加入了溫度變化斜率的跟蹤。溫度斜率計算公式為:
式中,Slope為溫度變化斜率,t為溫度采集時間間隔,PVn、PVn-1分別為本次的溫度采集的數據和上次的溫度采集的數據。在加熱或制冷進行當中,一旦溫度變化斜率大于給定的值,帕爾貼停止工作,防止下一次PID計算之前試劑過加熱或者過冷卻。
圖7為PID控制優化算法流程圖。

圖7 PID控制優化算法流程圖
3 系統調試
本系統硬件H橋電路加入了保護電路,并對加熱器件進行散熱處理,經運行測試,整個系統運行可靠、功能穩定,具有良好的動態品質。該加熱器可以有效完成試劑從37 ℃加熱加熱到65 ℃,然后降溫到37 ℃,最后恒溫37 ℃這一過程,圖8為試劑瞬時溫度測試結果。圖中參考線為37 ℃,最高加熱溫度為65 ℃,根據實驗結果,本系統設計能夠達到準確升溫和降溫的要求。

圖8 溫度測試結果
結 語

[1] 曹陽. 醫療設備產業發展趨勢概述[J]. 醫療衛生裝備,2015(8):109-112.
[2] 朱小松. 帕爾貼器件及其在控溫裝置中的應用[J]. 電子技術應用,1990(12): 44-47.
[3] 王直,孫強. 基于STM32的半導體制冷片控制系統設計[J]. 電子設計工程,2015(18):100-102,106.
[4] 錢青. 基于帕爾貼的溫度控制實驗平臺的研究與開發[D].南京:東南大學,2015.
[5] 李俊濤. 基于H橋驅動電路的半導體制冷片恒溫控制系統[J]. 北華大學學報:自然科學版,2010(5):464-466.
[6] 張鵬飛,齊曉慧. 基于N溝道MOS管H橋驅動電路設計與制作[J]. 科技信息,2012(20):147-149.
[7] 陶凱,賴康生. 基于PWM控制H橋驅動半導體制冷片的恒溫系統[J]. 工業控制計算機,2013(4):131-133.
熊偉(在校研究生), 主要研究方向為信號與信息處理;耿瑯環(在校研究生),主要研究方向為信號與信息處理。
參考文獻
[1] 姜天宇.基于多MEMS傳感器數據融合的組合測姿系統的設計與實現[D].南京:東南大學,2015.
[2] 劉昆.基于多傳感器的同時定位與建圖[D].哈爾濱:哈爾濱工業大學,2015.
[3] M Dissanayake, P Newman, S Clark, et al. Csorba. A solution to the simultaneous localization and map building problem[J]. IEEE Transactions on Robotics and Automation,2001,17(3):236.
[4] Sebastian Thrun, Wolffram Burgard, and Dieter Fox. Probabilistic Robotics[M]. Cambridge :The MIT Press,2005:128.
[5] 周鑫,朱楓.關于P3P問題解的唯一性條件的幾點討論[J].計算機學報,2003,26(12):1697-1700.
[6] Li Xiaoran, Chen Mou, Zhang Lei. Quaternion-Based Robust Extended Kalman Filter for Attitude Estimation of Micro Quadrotors Using Low-cost MEMS[C]//In:Chinese Control Conference,New York,IEEE,2016:10712-10713.
[7] Jose-Luis Blanco. Derivation and Implementation of a Full 6D EKF-based Solution to Bearing-Range SLAM[M].Spain:Perception and Mobile Robots Research Group University of Malaga,2008:10-11.
尚明超(碩士研究生),主要研究方向為嵌入式與智能控制;楊斌(碩士生導師),主要研究方向為嵌入式系統應用;張翠芳(碩士生導師),主要研究方向為智能控制。
(責任編輯:楊迪娜 收稿日期:2017-02-24)
Software Modular Design of Peltier Heater Based on STM32
Xiong Wei,Geng Langhuan
(School of Electronic Information,Xi’an Polytechnic University,Xi’an 710048,China)
In order to solve the problems of high cost,low intelligence and low safety of medical heater on the market,a STM32-based Peltier heater is designed.The Peltier thermoelectric semiconductor refrigeration devices and STM32 chip are used.For the Peltier heating and cooling dual function,two H-bridge circuits are built as a driving circuit,each H-bridge circuit using four field effect transistors as a basic component.This design achieves the intelligent temperature control and key control multi-function and display,it is a kind of user-friendly design.In addition,the whole system is modularized programming.The use of μC/OS-II system and PID optimizates the control algorithm,not only achieves offline work,but also greatly improves the stability,accuracy and practicality of the system.
STM32;peltier;H bridge drive circuit
TP29
A
?迪娜
2017-02-16)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17