基于BP-PID控制器的盾構液壓推進控制系統研究
2017-08-01 00:00:37李閣強牛彥杰徐莉萍郭冰菁李躍松
隧道建設(中英文) 2017年7期
李閣強, 牛彥杰, 陳 饋, 徐莉萍, 郭冰菁, 李躍松
(1. 河南科技大學機電工程學院, 河南 洛陽 471023; 2. 機械裝備先進制造河南省協同創新中心, 河南 洛陽 471000; 3. 盾構及掘進技術國家重點實驗室, 河南 鄭州 450001)
?
基于BP-PID控制器的盾構液壓推進控制系統研究
李閣強1, 2, 牛彥杰1, 2, 陳 饋2, 3, 徐莉萍1, 2, 郭冰菁1, 2, 李躍松1, 2
(1. 河南科技大學機電工程學院, 河南 洛陽 471023; 2. 機械裝備先進制造河南省協同創新中心, 河南 洛陽 471000; 3. 盾構及掘進技術國家重點實驗室, 河南 鄭州 450001)
為解決盾構在復雜地層施工時推進速度和壓力難以控制的問題,在壓力流量控制的基礎上提出BP神經網絡控制策略。通過AMESim建立推進系統物理模型,并利用Simulink設計出BP神經網絡控制器,最后對系統進行聯合仿真,分析推進系統液壓缸在變流量和變負載工況下推進速度和壓力的響應特性。仿真結果表明: 該控制策略與常規PID控制相比,波動幅度降低,調節時間快。采用BP神經網絡PID控制能夠有效地提高盾構在負載突變情況下速度和壓力控制精度,穩定性好、適應能力強,為盾構控制系統設計和優化提供理論參考。
盾構; 推進系統; BP神經網絡; PID; 仿真
0 引言
隨著地鐵隧道及地下空間建設的全面展開,盾構施工得到了越來越廣泛的應用。盾構推進系統主要完成盾構前進、姿態糾偏、調向等運動,其控制性能決定掘進路線的精度和刀盤使用壽命[1]。土層環境的復雜性和負載時變性等因素對盾構推進系統控制及隧道施工質量影響較大[2]。因此,推進系統的控制成為盾構施工的難題。
國內外已有許多學者對推進系統的控制策略進行了研究,如: 龔國芳等[3]運用模糊PID控制的方法,研究了在該控制策略下盾構推進速度的響應特性; 劉國斌等[4]提出神經網絡控制結合推進速度的數學模型,說明了該控制方法的有效性; 施虎等[5]設計了推進系統單神經元PID控制器,實現了推進速度的自適應控制; 周如林等[6]將專家系統和PID控制相結合,設計出推進系統區間內同步控制器; 胡國良等[7]通過PLC編譯主從式同步PID控制程序,并進行了試驗驗證。現有的研究成果大多集中在對盾構推進速度適應性的研究,但是對推進壓力和推進速度相互影響的研究較少。
本文將BP網絡PID控制策略應用于盾構掘進速度壓力復合控制中,分析盾構在變負載和變流量的工況下,推進系統的壓力和速度的控制特性。
1 盾構液壓推進系統
盾構推進油缸采用分區控制,通過調整各區油缸的推進速度、壓力來滿足盾構施工中的轉彎、曲線推進、方向糾偏和直線行進等要求[8]。在各區某缸體內置位移傳感器和壓力傳感器,能實時反饋盾構在實際工況下的掘進參數,通過反饋信號與給定信號產生的偏差來控制比例閥,滿足壓力和速度連續在線可調的要求[9]。
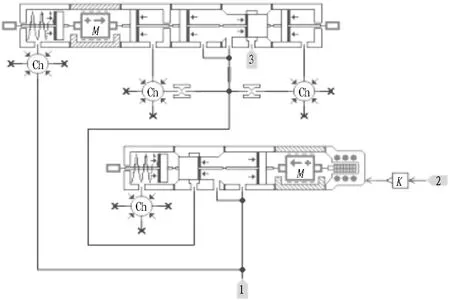
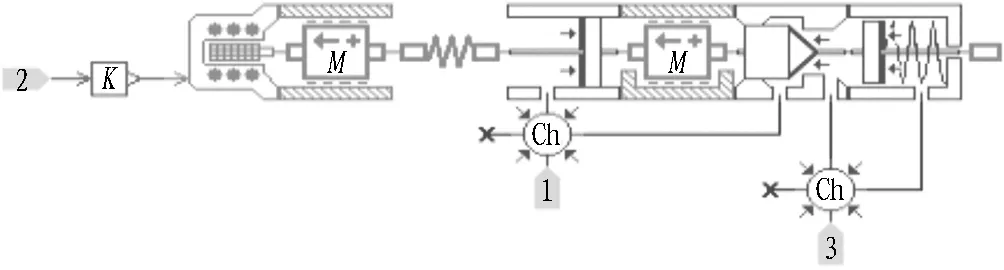
盾構單組推進系統的液壓原理圖如圖1所示,推進系統主要由推進油缸、比例溢流閥、比例調速閥、插裝閥、換向閥、位移傳感器和壓力傳感器等組成。盾構在正常推進時,插裝閥均保持關閉狀態,壓力油經過調速閥9進入推進缸,活塞桿頂緊管片,迫使刀盤向前頂進。比例溢流閥8根據壓力傳感器10檢測的外負載與壓力指令信號的偏差值,在線調整推進壓力。通過位移傳感器12檢測到的反饋信號與給定速度信號的偏差值,改變節流閥的開口大小可改變系統的流量,從而實現推進速度的閉環控制。快速回退時,電磁閥2.1和2.2左移,電磁換向閥6處于左位,比例調速閥9被插裝閥3.1短路,系統進行大流量供油,實現油缸的快速回退。
2 推進系統BP網絡PID控制
由對推進系統的分析可知,各區液壓缸協調和同步運動影響盾構實際掘進的精度,改進系統壓力流量控制器是優化系統控制性能的主要方法。盾構施工環境發生突然變化時,PID控制器無法根據實際工況實時調整符合要求的控制規律,姿態控制的動態性能和穩定性變差[6]。為解決上述問題,利用BP網絡非線性函數的逼近能力對常規PID控制器進行優化,經過網絡反復學習和訓練,快速獲得符合當前環境下的控制參數,當外界環境變化時,網絡能夠快速進行參數的再次尋優[4]。由于該控制策略具有在線調整kp、ki、kd(kp、ki、kd為PID控制器比例、積分、微分系數)的優勢,特別適合盾構在實際工況下負載時變非線性、滯后性等復雜的控制系統。盾構推進系統速度和壓力的BP網絡PID控制結構如圖2所示。
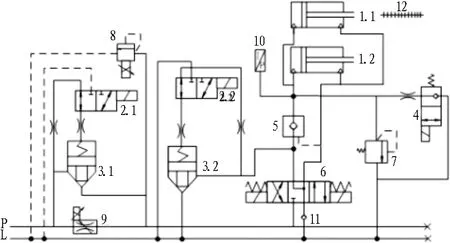
1.1、1.2—推進油缸; 2.1、2.2—電磁換向閥; 3.1、3.2—插裝閥; 4—換向閥; 5—液控單向閥; 6—三位四通電磁換向閥; 7—溢流閥; 8—比例溢流閥; 9—比例調速閥; 10—壓力傳感器; 11—單向閥; 12—位移傳感器。
圖1 單組液壓推進系統原理圖
Fig. 1 Working principle of single group of hydraulic thrusting system
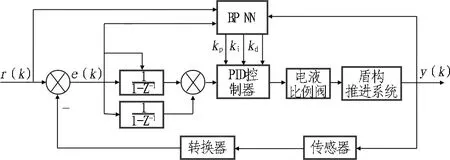
圖2 BP網絡的PID控制器
2.1 增量式PID控制器
常規增量式PID控制器控制表達式[10]為:
u(k)=u(k-1)+Δu(k);
(1)
Δu(k)=kp[e(k)-e(k-1)]+kie(k)+kd[e(k)-2e· (k-1)+e(k-2)]。
(2)
式(1)—(2)中:u(k)、u(k-1)為第k、k-1次采樣時調節器的輸出信號;e(k)、e(k-1)、e(k-2)分別為調節器在k、k-1、k-2次采樣的偏差值; Δu(k)為輸出信號增量。
2.2 BP神經網絡
根據盾構推進系統建立3-5-3型BP神經網絡模型,將PID控制算法加入到BP網絡模型中。通過網絡反復學習和訓練輸出理想的控制參數[11],取某一時刻盾構速度或壓力的設定值r(k)、推進速度或壓力的實際值y(k)、設定值與實際值之間的偏差e(k)作為模型輸入,如圖3所示。
BP網絡第2層的輸入、輸出為:

(i=1,2,…,5;j=1,2,…,5);
(3)
(4)
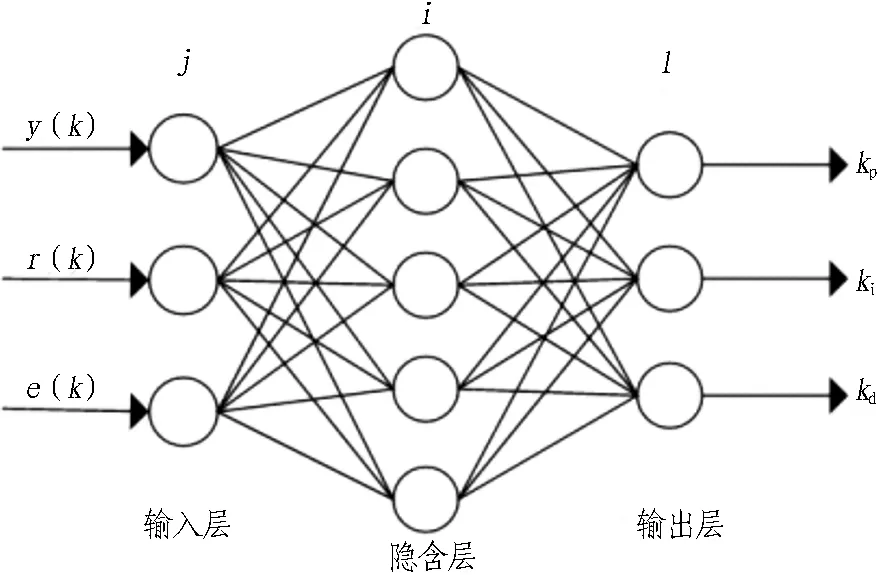
圖3 BP網絡的PID結構
網絡第2層的激勵函數采用對稱的sigmoid函數

(5)
網絡第3層的輸入、輸出為:

(6)
(7)
當l=1、2、3時,
隱含層的輸出是kp、ki、kd,因此該層的活化函數使用非負的sigmoid函數

(8)
性能指標函數
(9)
式中:r(k)為第k次采樣輸入信號;y(k)為第k次采樣輸出信號。
權值的學習算法采取附加動量的梯度下降法,有效地解決收斂緩慢的問題[12]。
網絡第3層權值的修正算法為
(10)
其中
g′(x)=g(x)[1-g(x)]。
網絡第2層權值修正算法為
(11)
其中
f′(x)=[1-f2(x)]/2。
式(10)—(11)中:α為慣性系數;η為學習速率。
3 聯合仿真
3.1 建立控制系統模型
利用Simulink建立BP網絡PID控制器結構模型,在仿真框圖中使用S函數來編寫BP網絡PID的算法程序。控制器輸入端分別是盾構推進系統壓力流量的設定值r(k)和實際值y(k),經過BP網絡PID控制器在線計算,在輸出端獲得控制規律u(k)和控制器參數,如圖4所示。
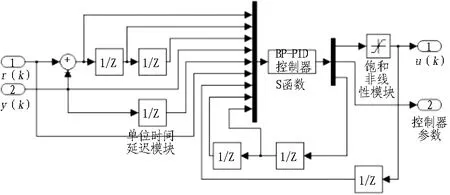
圖4 BP網絡控制器仿真結構
3.2 建立電液比例閥模型
比例調速閥的工作原理是通過調節作用在電磁鐵上的電壓信號,改變推動閥芯運動的推力,從而滿足系統推進壓力的線性變化[13]。同理,比例溢流閥通過線性變化的電壓信號,改變閥芯開口量大小,進而為系統提供呈線性變化的流量。
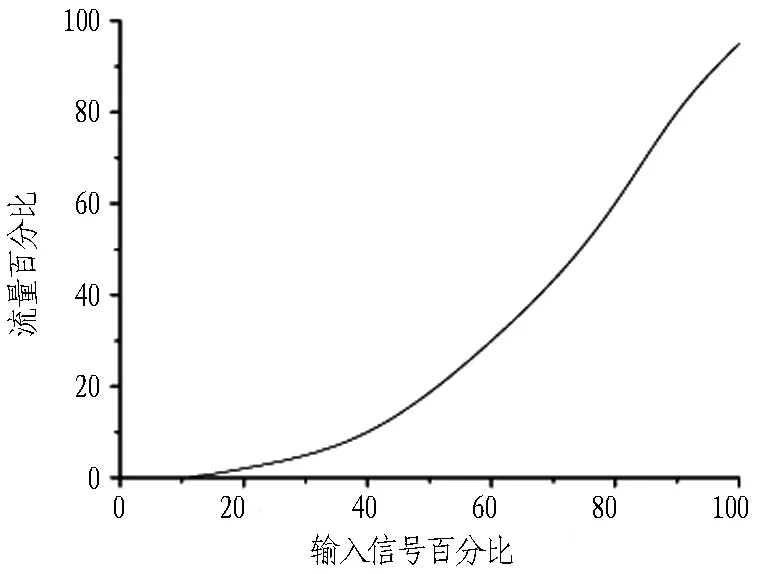
利用AMESim軟件自帶的HCD庫設計出比例調速閥和比例溢流閥的物理模型,并對比例調速閥進行特性仿真,如圖5和圖6所示。由圖可以看出,通過HCD庫建立的比例閥模型與輸入的電流信號大體呈線性關系,說明具有較好的控制特性。
3.3 系統聯合仿真
建立推進系統物理模型和BP網絡PID控制模型后,在AMESim中創建與Simulink的接口模塊,實現液壓系統AMESim模型與Simulink模型的連通[14-15]。推進系統聯合仿真的AMESim模型和Simulink模型見圖7和圖8。通過聯合仿真,綜合利用AMESim和Matlab各自在仿真模型中的優勢為盾構推進系統提供完善的仿真環境。
4 仿真結果分析
4.1 流量變化,負載不變
系統仿真參數設置為: 推進負載為600 kN; 調速閥的流量在0~5 s為1.256 L/min,5~10 s為1.884 L/min。BP網絡參數設定為: 網絡學習效率為0.20,慣性系數為0.05,仿真時間10 s,采樣時間0.02 s。其他各參數設置完成,即可對推進系統進行聯合仿真。圖9和圖10分別示出采用常規PID控制和BP網絡PID控制時推進速度和壓力的仿真曲線。
(a) 比例調速閥
(b) 比例溢流閥
Fig. 5 AMESim models of proportional speed control valve and proportional relief valve
(a) 流量

(b) 壓力
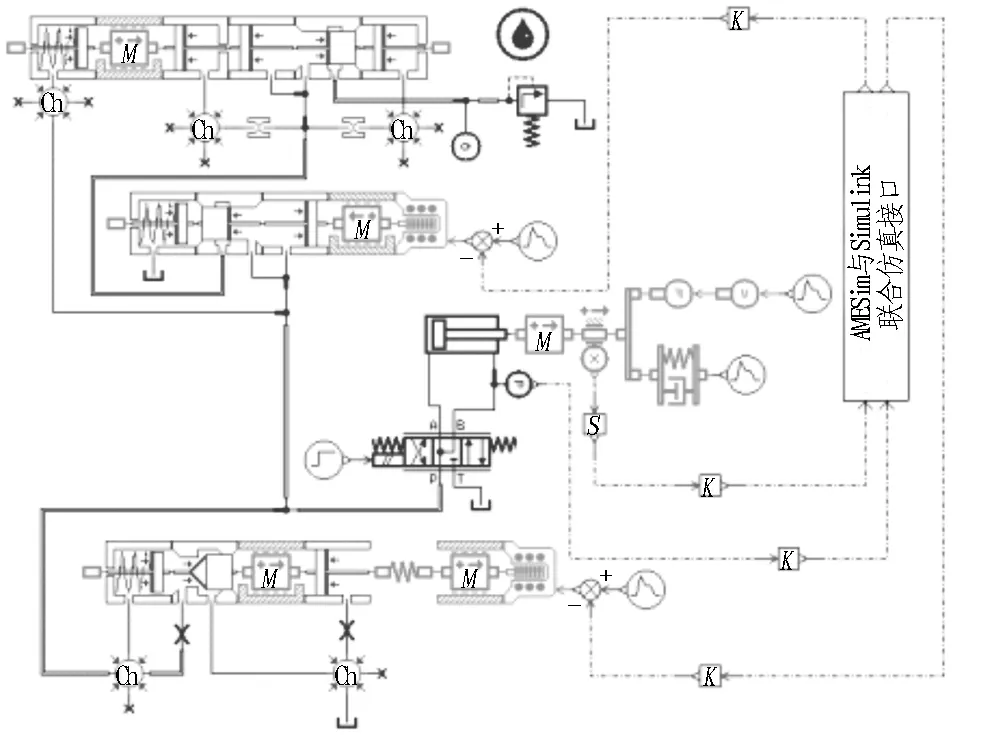
圖7 推進系統聯合仿真的AMESim模型
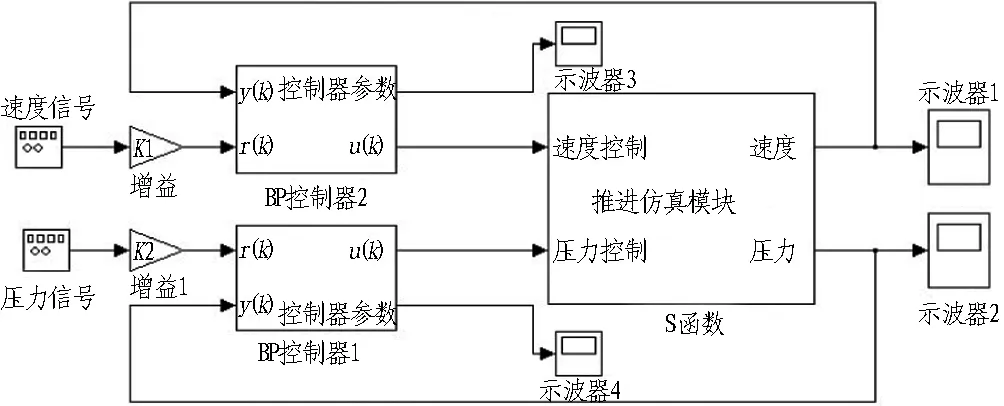
圖8 推進系統聯合仿真的Simulink模型
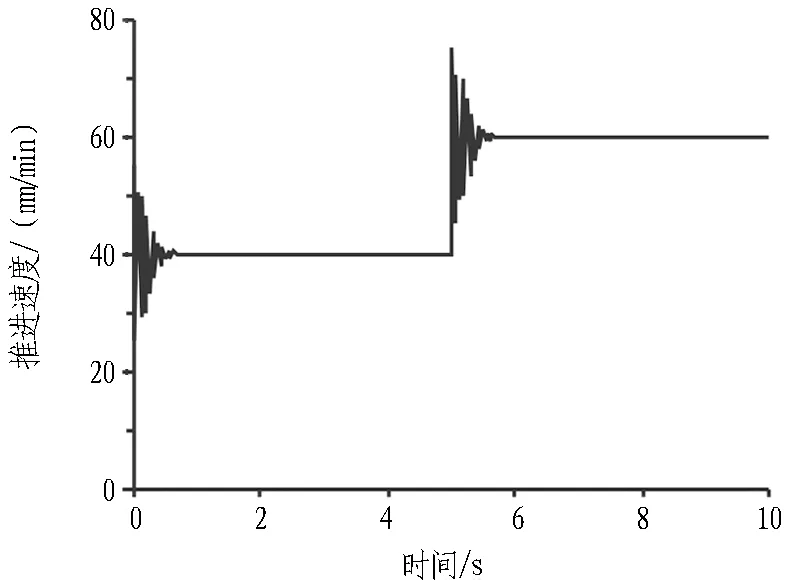
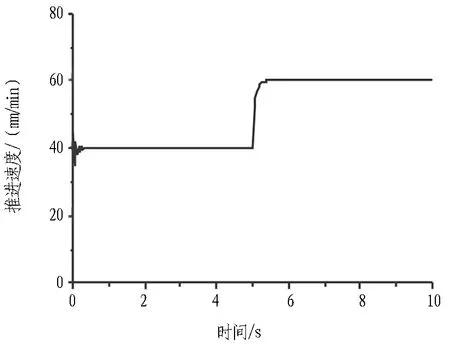
(a) 速度曲線
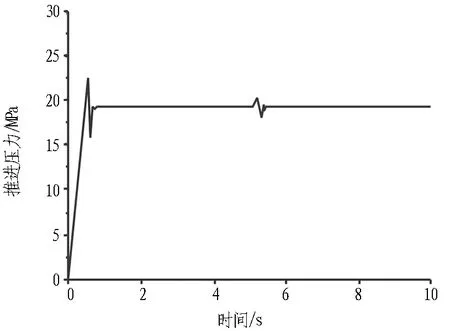
(b) 壓力曲線
Fig. 9 Velocity and pressure curves of conventional PID controller(with flow variation and aptotic load)
(a) 速度曲線
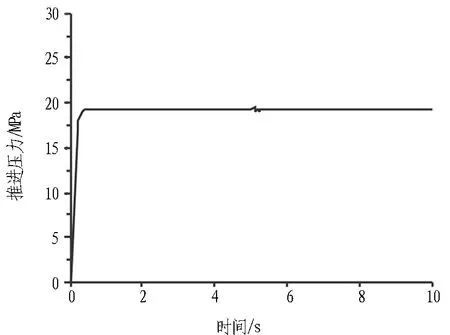
(b) 壓力曲線
Fig. 10 Velocity and pressure curves of BP neural network PID controller (with flow variation and aptotic load)
如圖9和圖10響應曲線所示,采用常規PID控制,由于液壓缸流量的突變,推進速度經過合理范圍內的振蕩后,迅速由40 mm/min達到60 mm/min,系統壓力在19.20 MPa附近出現小范圍的波動。采用BP網路PID策略后,推進速度經過很短時間調節后達到穩定狀態,沒有出現超調,系統流量突變對壓力波動的影響也減小。采用BP網絡PID控制系統響應縮短0.4 s左右,最大振蕩幅值減小至原來的1/2以內,可見該控制方法具有很好的跟蹤性和自適應能力。
4.2 負載變化,流量不變
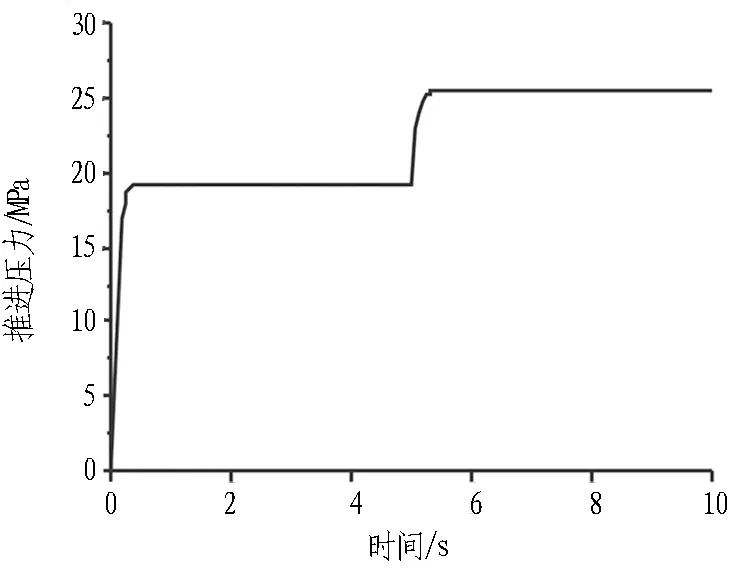
該系統仿真參數設置為: 前5 s時間內,負載為600 kN; 后5 s時間內,負載為800 kN; 調速閥流量設定1.256 L/min; 其他參數保持不變。采用常規PID控制和BP網絡PID控制時的推進速度和壓力的仿真曲線如圖11和圖12所示。
由圖11仿真曲線可以看出: 采用PID控制策略,當推進負載突變時,系統壓力經過較小的波動后1.2 s內迅速由19.20 MPa達到25.48 MPa; 但是在5 s時刻,推進速度的最大值瞬間達到600 mm/min左右,出現嚴重超調,速度控制性能變差。產生該現象的原因是推進系統負載瞬間的突變導致油缸流量跟隨驟然發生變化,對速度影響較大,常規PID控制不能滿足速度控制精度的要求。
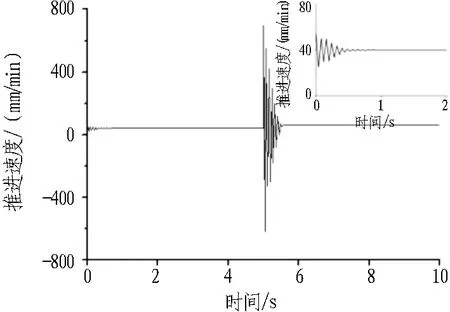
(a) 速度曲線
(b) 壓力曲線
Fig. 11 Velocity and pressure curves of conventional PID controller(with load variation and aptotic flow)
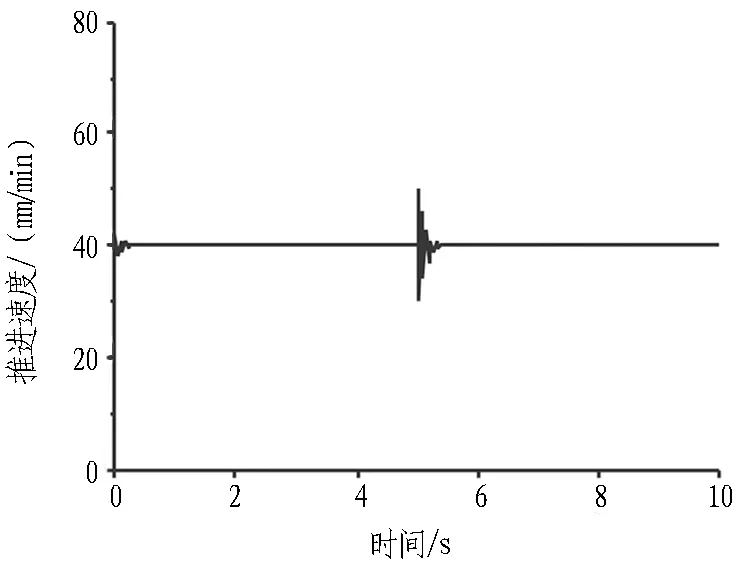
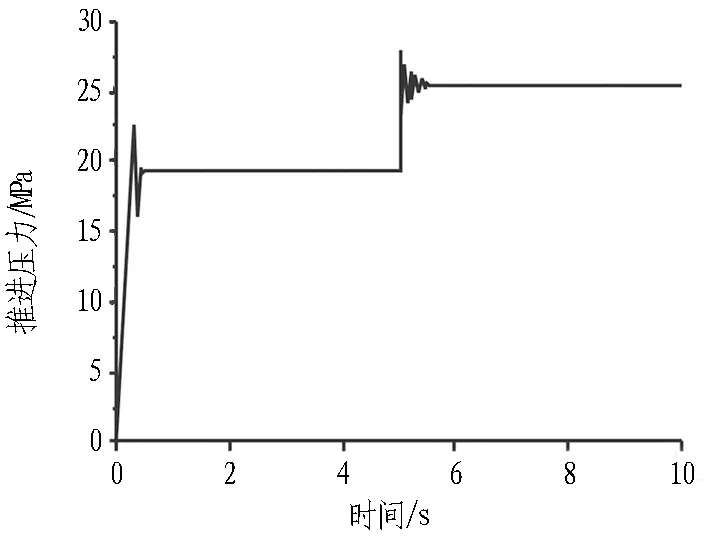
(a) 速度曲線
(b) 壓力曲線
Fig. 12 Velocity and pressure curves of BP neural network PID controller(with load variation and aptotic flow)
采用BP網絡PID控制策略,速度幅值減弱至50 mm/min左右,0.4 s后快速恢復到原來的穩態值40 mm/min,大大減弱負載突變對系統速度的影響。可見,BP網絡PID控制更適合應用于某些外界負載和干擾等因素時變的控制系統,具有很好的魯棒性。
5 結論與討論
1)基于BP網絡PID控制器,能夠根據盾構推進負載不同狀況,在線調整控制參數,有效地提高盾構推進壓力和速度控制精度,自適應能力強,穩定性好。
2)常規BP神經網絡控制存在一定的局限性。由于網絡權重矩陣初始化設置問題嚴重影響著盾構推進速度和壓力的控制效果,如何優化BP網絡初始化權值有待深入討論。
3)采用該控制策略有效地削弱了盾構施工中模型攝動和地質工況時變等不確定因素的干擾,為今后復雜地層中盾構推進系統的研究設計提供了一定的理論參考。
4)盾構推進控制系統可采用多種控制策略,本文對BP網絡與常規PID相結合的控制策略展開研究,建議進一步采取多種先進控制方法組合的方式對推進系統進行理論分析,以實現推進參數的精確控制。
[1] 陳饋, 洪開榮, 吳學松. 盾構施工技術[M]. 北京: 人民交通出版社, 2009: 91. CHEN Kui, HONG Kairong, WU Xuesong. Shield construction technique[M]. Beijing: China Communications Press, 2009: 91.
[2] 馮歡歡,王助鋒,張合沛. 盾構實驗臺液壓推進系統的設計與研究[J]. 液壓氣動與密封, 2012, 32(12): 14-17. FENG Huanhuan,WANG Zhufeng,ZHANG Hepei. Design and study of shield experimental platform thrust hydraulic system[J]. Hydraulics Pneumatics and Seals, 2012,32(12): 14-17.
[3] 龔國芳,胡國良,楊華勇.盾構推進液壓系統控制分析[J].中國機械工程, 2007, 18(12): 1391-1395. GONG Guofang,HU Guoliang,YANG Huayong. Control analysis of thrust hydraulic system for shield tunneling machine[J]. China Mechanical Engineering, 2007,18(12): 1391-1395.
[4] 劉國斌,龔國芳,朱北斗,等. 基于BP神經網絡的盾構推進速度自適應PID控制[J]. 工程設計學報, 2010, 17(6): 454-458. LIU Guobin, GONG Guofang, ZHU Beidou, et al.Adaptive PID control for thrust speed of the shield based on BP neural networks[J]. Journal of Engineering Design, 2010, 17(6): 454-458.
[5] 施虎,龔國芳,楊華勇. 基于單神經元的盾構推進速度自適應PID控制[J]. 中國機械工程,2009,20(2): 38-41. SHI Hu, GONG Guofang,YANG Huayong. Adaptive PID control for thrust speed of shield based on single neuron[J]. China Mechanical Engineering, 2009, 20(2): 38-41.
[6] 周如林,龔國芳,汪慧,等. 盾構推進系統專家PID同步控制分析[J]. 中國機械工程, 2010, 21(18): 2202-2206. ZHOU Rulin, GONG Guofang, WANG Hui, et al. Expert-PID synchronization control of thrust hydraulic system[J]. China Mechanical Engineering, 2010, 21(18): 2202- 2206.
[7] 胡國良,龔國芳,楊華勇.基于壓力流量復合控制的盾構推進液壓系統[J].機械工程學報, 2006, 42(6): 124-127. HU Guoliang,GONG guofang, YANG huayong. Thrust hydraulic system of shield tunnel boring machine with pressure and flow compound control[J]. Chinese Journal of Mechanical Engineering, 2006, 42(6): 124-127.
[8] 陳峰. 基于AMESim盾構負載模擬系統設計與仿真分析[J]. 液壓與氣動, 2015(3): 36-39. CHEN Feng. Design and research on the load simulation of shield in AMESim [J]. Chinese Hydraulics and Pneumatics, 2015(3): 36-39.
[9] 李錦,黃長征. 盾構機液壓推進系統穩定性研究[J]. 液壓與氣動, 2014(3): 54-57. LI Jin,HUANG Changzheng. Study of stability of hydraulic propulsion system for shield tunneling machine[J]. Chinese Hydraulics and Pneumatics, 2014(3): 54-57.
[10] 王敬志,任開春,胡斌. 基于BP神經網絡整定的PID控制[J]. 工業控制計算機, 2011, 24(3): 72-73. WANG Jingzhi, REN Kaichun, HU Bin. PID control based on BP neural network[J]. Industrial Control Computer,2011, 24(3): 72-73.
[11] 任有志,楊亞威,曾謙,等. BP神經網絡PID控制器在聚合釜溫控中的應用[J]. 現代化工, 2016, 32(2): 165-167. REN Youzhi, YANG Yawei, ZENG Qian, et al. Application of BP neural network PID controller in temperature control of polymerizer[J]. Modern Chemical Industry, 2016, 32(2): 165-167.
[12] 王紫薇,孫麗萍,王清文,等. 木塑擠出機溫度的BP神經網絡PID控制算法[J]. 木材加工機械, 2016, 27(2): 21-24. WANG Ziwei, SUN Liping, WANG Qingwen, et al.The algorithmic research of wood plastic extruder temperature of BP neural network PID control system[J]. Wood Processing Machinery, 2016, 27(2): 21-24.
[13]DUAN Xiaoming, XIE Haibo,LIU Zhibin,et al. Precise control of thrust force on the shield tunneling machine[J]. Applied Mechanics and Materials, 2011, 48-49: 834-839.
[14] YANG Huayong,SHI Hu,GONG Guofang, et al. Electro-hydraulic proportional control of thrust system for shield tunneling machine[J].Automation in Construction, 2009, 18(7): 950-956.
[15] 朱宏堂. 基于模糊PID算法的盾構機土壓平衡控制研究[J]. 液壓與氣動, 2013(6): 103-107. ZHU Hongtang. Research of earth pressure balance control of shield machine based on the fuzzy PID algorithm[J]. Chinese Hydraulics and Pneumatics, 2013(6): 103-107.
Research on Hydraulic Thrusting Control System of Shield Machine Based on BP-PID Controller
LI Geqiang1, 2, NIU Yanjie1, 2, CHEN Kui2, 3, XU Liping1, 2, GUO Bingjing1, 2, LI Yuesong1, 2
(1.SchoolofMechatronicsEngineering,HenanUniversityofScienceandTechnology,Luoyang471023,Henan,China;2.CollaborativeInnovationCenterofMachineryEquipmentAdvancedManufacturing,Luoyang471000,Henan,China;3.StateKeyLaboratoryofShieldMachineandBoringTechnology,Zhengzhou450001,Henan,China)
The BP neural network control system is proposed on the basis of pressure flow control so as to control the speed and pressure during shield tunneling in complex strata. The physical model of shield thrusting system is established by AMESim; and then the BP neural network controller is designed by Simulink; finally, the system is simulated so as to analyze the response characteristics of thrusting speed and velocity of hydraulic thrusting control cylinder of shield machine under variable flow and variable load conditions. The simulation results show that: 1) Compared to conventional PID controller, the fluctuation amplitude of BP-PID controller is lower and the adjusting response time is shorter. 2) The control accuracy of thrusting speed and pressure of shield machine under loading condition can be improved by using BP neural network PID controller. 3) The practice shows that the above-mentioned controller has good stability and adaptability, so as to provide theoretical reference for design and optimization of shield control system.
shield; thrusting system; BP neural network; PID; simulation
2016-12-12;
2017-04-06
國家重點基礎研究發展計劃(“973”計劃)項目(2014CB046906); 中鐵建投科技創新計劃課題(2016-01-3); 盾構及掘進技術國家重點實驗室開放課題(2014-03); 國家高技術研究發展計劃(“863”計劃)項目(2012AA0418002)
李閣強(1971—),男,吉林長春人,2007年畢業于哈爾濱工業大學,機械電子工程專業,博士,副教授,現從事電液伺服控制相關的科研和教學工作。E-mail: hitligeqiang@163.com。
10.3973/j.issn.1672-741X.2017.07.016
U 455.3
A
1672-741X(2017)07-0885-06
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
