平臺式航空/海洋重力儀精密溫度控制研究
2017-08-07 11:41:24劉東斌胡平華宋毅龍許東歡苗成義陳曉華
導航定位與授時 2017年4期
劉東斌,胡平華,宋毅龍,許東歡,苗成義,陳曉華
(1.北京自動化控制設備研究所,北京 100074; 2.青島航天半導體研究所有限公司,青島 266071;3.上海航天控制技術研究所,上海 200233)
?
平臺式航空/海洋重力儀精密溫度控制研究
劉東斌1,胡平華1,宋毅龍2,許東歡3,苗成義1,陳曉華1
(1.北京自動化控制設備研究所,北京 100074; 2.青島航天半導體研究所有限公司,青島 266071;3.上海航天控制技術研究所,上海 200233)
以平臺式航空/海洋重力儀為基礎,為降低溫度變化對其慣性器件尤其是重力敏感器的影響,保證重力測量的精度,設計了一種三級五路結構的高精度溫度控制系統。以包含核心慣性器件的第三級溫控為例,重點分析了溫控對象的建模、非線性PI控制器的設計等問題,并進行了仿真分析和高低溫環境下的試驗驗證,結果表明,在-10℃~+45℃溫度范圍內3個溫控通道的溫度變化量和溫度穩定性均小于0.01℃,達到了重力儀的溫度控制精度要求,為重力儀實現高精度重力測量提供了有利的溫度條件。
航空/海洋重力儀;重力敏感器;溫度控制;非線性PI控制
0 引言
航空/海洋重力儀在進行重力測量作業時,由于測量載體、氣候環境的不同,其工作環境溫度差異會比較大,而平臺式航空/海洋重力儀(以下簡稱重力儀)所用的慣性器件,例如動力調諧陀螺、石英撓性加速度計都對溫度比較敏感,尤其是作為重力敏感器使用的垂向石英撓性加速度計,由于測量精度要求非常高,對溫度環境要求更高,通常要求溫度穩定性要高于0.02℃。因此,為確保重力儀的測量精度和測量穩定性,必須為核心慣性器件設計高精度的溫度控制系統[1]。加拿大山德爾地球物理公司(Sander Geophysics Limited,SGL)研制的AIRGrav重力儀的溫控精度在0.02℃,動態重力測量精度達到了0.2 mGal[2-3];國防科學技術大學研制的首臺捷聯式航空重力儀溫控精度也達到了0.02℃[3],國內其他科研單位也在重力儀精密溫控系統方面開展了大量的研究工作并取得了很好的成果[4-8]。
為了滿足在寬溫度條件(-10℃~+45℃)下的高精度溫度控制要求,本文設計了一種三級五路的重力儀溫控系統,分別對重力儀的殼體、框架、平臺臺體、陀螺以及重力敏感器進行精密溫度控制,通過仿真分析和試驗測試,驗證了該溫度控制系統能夠為重力儀系統內部各慣性器件提供良好的溫度環境,有效提升了重力測量的精度和穩定性。
1 組成及工作原理
重力儀主機的外形如圖1所示,重力儀穩定平臺的組成結構如圖2所示。
重力儀溫控系統從外至內分為三級,第一級為平臺殼體,主要用于重力儀平臺與外部環境的隔熱與散熱,以及為內部兩級溫控提供相對穩定的溫度環境,綜合考慮重力儀的工作環境溫度及內部溫控通道的散熱需求,經試驗測試,將該溫控點設置為47℃;第二級為平臺框架,用于進一步提升和改善平臺臺體、陀螺以及重力敏感器的工作環境溫度條件,經試驗測試,將該溫控點設置為62℃;第三級包括平臺臺體、陀螺以及重力敏感器3個溫控通道,由于平臺臺體、陀螺和重力敏感器在結構上比較緊密,各通道之間的溫度耦合比較嚴重,因此,在設計時需要保證3個通道的溫控點相差不能太大,經反復測試分析,最終將平臺臺體的溫控點設置為74.5℃,陀螺的溫控點設置為75℃,重力敏感器的溫控點設置為76℃。
為了保證加溫的快速性和對外部環境的適應性,重力儀第一級和第二級溫控采用115V交流加溫;在內部第三級溫控通道,平臺臺體和陀螺溫控采用45V直流加溫,重力敏感器溫控采用13V直流加溫,盡量減小各溫控通道電磁干擾對重力敏感器輸出的影響。
控制算法設計上,重力儀三級五路溫控均采用非線性PI控制算法,進一步提高重力儀溫控系統的快速性和溫控精度。本文以重力儀第三級的三路溫控通道為例,著重分析重力儀系統的精密溫度控制設計。
2 溫控對象建模
由于平臺臺體、陀螺和重力敏感器之間存在一定程度的溫度耦合現象,無法單獨對每一路溫控對象建立精確的數學模型,因此考慮采用實驗的方法辨識得到平臺臺體、陀螺和重力敏感器的溫控模型。
以平臺臺體為例,其溫控對象模型辨識方法為:根據重力儀實際工作時平臺臺體的環境溫度(也就是重力儀第二級溫控的溫度點62℃)和該通道的溫控目標溫度74.5℃,計算得到平臺臺體的工作溫升,通過實驗的方法測得使平臺臺體產生該工作溫升所需的加溫電壓。待環境溫度重新穩定到62℃后,對平臺臺體施加該加溫電壓(此時,陀螺和重力敏感器不需要通電運行),實時記錄平臺臺體、陀螺和重力敏感器3個通道的溫度監測值,直到各溫控對象的溫度趨于穩定。用同樣的方法對陀螺、重力敏感器2個通道進行加溫測試并記錄相應的溫升曲線。實驗得到的溫升曲線如圖3~圖5所示。
利用MATLAB對實驗得到的9條曲線進行輸入輸出擬合,并計算相應的傳遞函數,可以辨識得到平臺臺體、陀螺和重力敏感器3個通道溫控對象的頻域模型如式(1)所示:
(1)
其中,y為各通道溫升值,單位為℃,u為各通道溫控功率,溫控功率值與溫控電壓的平方成正比,G(s)為3個通道溫控對象的傳遞函數,s為Laplace算子;ytt為平臺臺體的溫升值,ycb為重力敏感器的溫升值,ytl為陀螺的溫升值;utt為平臺臺體的溫控功率,ucb為重力敏感器的溫控功率,utl為陀螺的溫控功率。
3 控制器設計及仿真分析
針對重力儀平臺臺體、陀螺和重力敏感器三路溫控通道存在溫度耦合的特點,利用非線性PI的方法設計各通道的溫度控制器。當溫度偏差的絕對值大于設定的閾值時,采用比例控制,保證溫控系統有較好的快速性,又避免引入過大的超調量;當溫度偏差的絕對值小于閾值時,引入積分環節,消除溫控系統的靜差,提高各通道的溫控精度和穩定性。
各通道溫控系統的非線性PI控制器設計如下:
(2)
其中,T為目標溫度值,y(t)為t時刻實測溫度值,e(t)為t時刻溫度偏差值,z(t)為t時刻溫度偏差的積分值,ε為引入積分環節的偏差閾值,zmax為積分飽和上限,kp為溫控比例系數,ki為溫控積分系數,u(t)為t時刻溫控功率,umax為溫控功率上限(根據各通道可提供的最大加溫電壓確定),uout(t)為t時刻實際輸出的溫控功率,v(t)為t時刻實際輸出的加溫電壓。
利用MATLAB建立重力儀平臺臺體、陀螺和重力敏感器三路溫控通道的仿真模型,如圖6~圖10所示。其中,仿真模型子系統1為各通道溫度輸出及監測模塊;仿真模型子系統2為各通道控制電壓轉換、輸出及監測模塊;仿真模型子系統3為各通道非線性PI控制器實現模塊;仿真模型子系統4為各通道的溫控對象模型。
經仿真調試,得到平臺臺體、陀螺和重力敏感器三路溫控通道的主要控制器參數如表1所示。
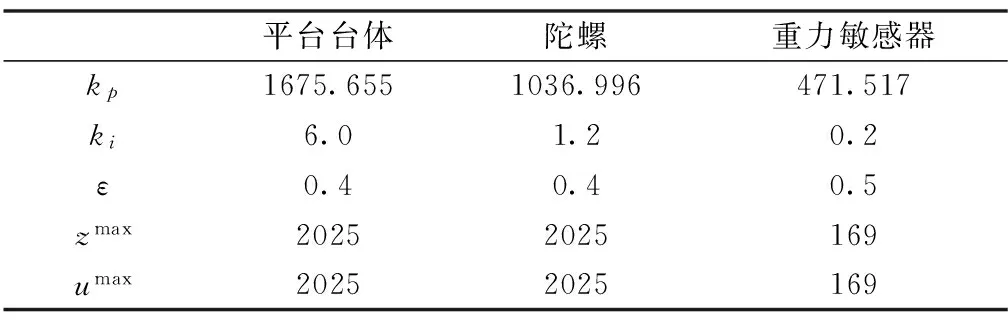
平臺臺體陀螺重力敏感器kp1675.6551036.996471.517ki6.01.20.2ε0.40.40.5zmax20252025169umax20252025169
仿真結果如圖11所示。從仿真結果來看,重力儀平臺臺體、陀螺和重力敏感器三路溫控通道的控制效果較好,各通道溫度均能快速穩定到設定的目標溫度值,可以滿足重力儀的使用要求。
4 試驗驗證
在重力儀系統上對設計的平臺臺體、陀螺和重力敏感器的溫度控制器進行試驗驗證,用C語言在DSP中實現三路控制器,實時監測各通道的溫度并輸出到測試計算機,圖12所示為常溫下平臺臺體、陀螺和重力敏感器的溫控曲線。
從圖12可以看出,各通道的溫控效果與之前的仿真結果近似,各通道均能較快地達到目標溫度值,穩態精度較高,平臺臺體、重力敏感器2個通道的溫控超調量很小,而由于平臺臺體、重力敏感器的溫升對陀螺通道有一定的耦合影響,陀螺通道的超調量略大,但也能夠滿足重力儀系統的實際使用需求。各通道達到溫度穩定后的溫度輸出曲線如圖13~圖15所示。
經過計算可知,常溫條件下平臺臺體、陀螺和重力敏感器3個通道實際達到的溫控精度如表2所示。
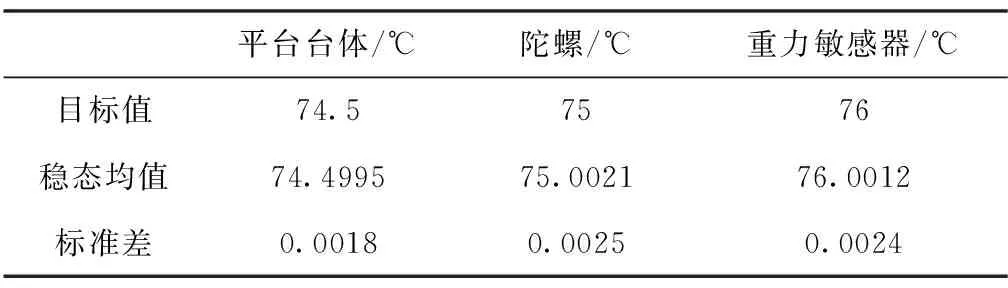
表2 平臺臺體、陀螺和重力敏感器的溫控精度
由表2可見,常溫條件下,平臺臺體、陀螺和重力敏感器的溫控溫度穩定性均優于0.01℃。
在-10℃環境溫度條件下對重力儀溫控系統進行試驗,監測平臺臺體、陀螺和重力敏感器的溫度輸出結果如圖16所示。
在-10℃環境溫度條件下,各通道達到溫度穩定后的溫度輸出曲線如圖17~圖19所示。
經過計算可知,重力儀系統在-10℃環境條件下,平臺臺體、陀螺和重力敏感器實際達到的溫控精度如表3所示。
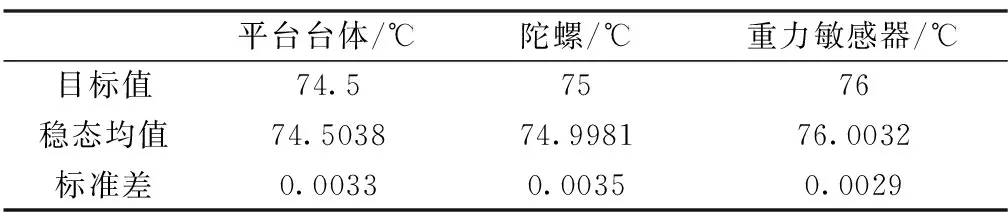
平臺臺體/℃陀螺/℃重力敏感器/℃目標值74.57576穩態均值74.503874.998176.0032標準差0.00330.00350.0029
由表3可見,低溫條件下,平臺臺體、陀螺和重力敏感器的溫控溫度穩定性均優于0.01℃。
在+45℃環境溫度條件下對重力儀溫控系統進行試驗,監測平臺臺體、陀螺和重力敏感器的溫度輸出結果如圖20所示。
在+45℃環境溫度條件下,各通道達到溫度穩定后的溫度輸出曲線如圖21~圖23所示。
經過計算可知,重力儀系統在+45℃環境條件下,平臺臺體、陀螺和重力敏感器實際達到的溫控精度如表4所示。
由表4可見,高溫條件下,平臺臺體、陀螺和重力敏感器的溫控溫度穩定性均優于0.01℃。
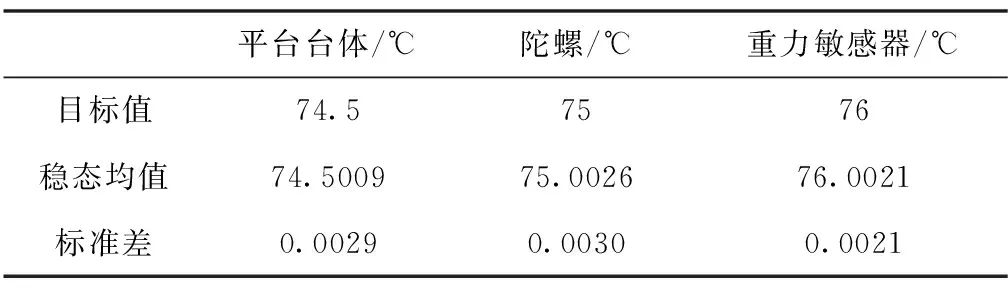
表4 在+45℃條件下3個通道的溫控精度
由表2~表4可知,重力儀環境溫度在-10℃~+45℃范圍內變化時,其平臺臺體、陀螺和重力敏感器的溫控溫度變化量最大分別為0.0043℃、 0.0045℃、0.0020℃,均能夠滿足重力儀優于0.01℃的指標要求。
5 結論
本文通過對溫控對象進行實際測試的方法建立其溫控模型,并采用非線性PI控制方法設計控制器,經數字仿真和實物試驗表明,在-10℃~+45℃的溫度范圍內,3個通道的溫控溫度變化量和溫控溫度穩定性均小于0.01℃,達到了重力儀的溫度控制精度要求。這也表明本文所采用的模型辨識方法和溫度控制器設計方法切實可行,所設計的溫度控制系統為保障重力儀的重力測量精度創造了有利的溫度條件。
[1] 熊盛青,周錫華,郭志宏,等.航空重力勘探理論方法及應用[M].北京:地質出版社,2010.
[2] Sander S,Argyle M,Elieff S,et al.The AIRGrav airborne gravity system[C]//ASEG-PESA Airborne Gravity 2004 Workship:Geoscience Australia Record, 2004:49-54.
[3] AIRGrav Airborne gravity[EB/OL].http://www. sgl.com/gravity.htm.
[4] 李紀蓮,張玘,張開東.航空重力測量比力溫控系統熱優化設計[J].中國慣性技術學報,2013,21(2):155-158.
[5] 吳艷霞,胡國慶,蔣幼華,等.高精度重力儀的恒溫控制系統 [J].大地測量與地球動力學,2008,28(5):133-135.
[6] 余瑤,鐘宜生.加速度計組合件高精度兩級魯棒溫度控制[J].航空學報,2009,30(6):1103-1108.
[7] 王偉,高維,李城鎖,等.重力梯度儀平臺雙向溫控設計[J].物探與化探,2015,39(S1):17-21.
[8] 郭緯川,馬杰,楚賢,等.重力儀散熱裝置的熱仿真分析[J].導航定位與授時,2015,2(2):63-66.
Research on High-Accuracy Temperature Control for Airborne/Marine Gravimeter Based on Inertial Stabilized Platform
LIU Dong-bin1, HU Ping-hua1, SONG Yi-long2, XU Dong-huan3, MIAO Cheng-yi1, CHEN Xiao-hua1
(1.Beijing Institute of Automatic Control Equipment, Beijing 100074,China;2.Qingdao Aerospace Semiconductor Research Institute Co.Ltd., Qingdao 266071,China;3.Shanghai Aerospace Control Technology Institute,Shanghai 200233,China)
In the airborne/marine gravimeter based on inertial stabilized platform, in order to reduce the influence of temperature change on inertial components, especially gravity sensor, a high-accuracy temperature control system with a structure of three-level and five-channel was designed to ensure the accuracy of gravity measurement.Taking the third level temperature control channel including core inertial components as an example, the modeling of temperature control object and the design of nonlinear PI controller were carefully analyzed.Simulation analysis and verification test in high and low temperature were also carried out.The results show that the temperature variation and the temperature stability of all three temperature control channels in the temperature range from -10℃ to +45℃ are better than 0.01℃, which meets the requirement of temperature control accuracy and provides a beneficial temperature condition for the gravimeter to realize high-precision gravity measurement.
Airborne/marine gravimeter; Gravity sensor; Temperature control; Nonlinear PI control
2016-04-15;
2017-06-18
國家自然科學基金重大科研儀器研制項目(41527803)
劉東斌(1983-),男,碩士,工程師,主要從事慣性技術、重力測量儀器方面的研究。E-mail: ldbliu@163.com
10.19306/j.cnki.2095-8110.2017.04.004
P223
A
2095-8110(2017)04-0029-07
