一種通用的衛星導航信號碼時延估計誤差評估方法?
2017-08-07 08:00:16劉楨張嘉怡陸明泉黃潔趙擁軍
物理學報 2017年12期
關鍵詞:信號
劉楨張嘉怡 陸明泉 黃潔 趙擁軍
1)(信息工程大學導航與空天目標工程學院,鄭州 450001)
2)(清華大學電子工程系,北京 100084)
一種通用的衛星導航信號碼時延估計誤差評估方法?
劉楨1)?張嘉怡2)陸明泉2)黃潔1)趙擁軍1)
1)(信息工程大學導航與空天目標工程學院,鄭州 450001)
2)(清華大學電子工程系,北京 100084)
(2017年3月13日收到;2017年4月6日收到修改稿)
衛星導航信號的碼時延估計誤差是決定系統服務性能的關鍵因素,迫切需要對多種不同調制與復用方式的導航信號進行全面的碼時延估計誤差性能評估,從而為后期的系統應用提供重要的選擇依據.為此,本文提出了通用的碼時延估計誤差評估方法.首先,概括了導航接收機的碼跟蹤環路模型,根據是否匹配接收以及是否相干處理,將目前的導航接收機歸納為四種類型.其次,在假設碼時延估計誤差非常小的條件下,分別給出了匹配接收下相干處理和非相干處理時的估計誤差以及相互之間的關系;推導了非匹配接收下非相干處理時的估計誤差,并討論了與相干處理時的關系.最后,推導了碼時延估計誤差的齊夫-扎凱界限,解決了估計誤差不滿足非常小這一假設條件時的評估.本文提出的評估方法均以導航信號的功率譜密度表示,為信號設計和接收機的研制提供了重要的理論指導,同時也給具體信號的評估帶來了極大便利.仿真實驗中對新一代典型導航信號的碼時延估計誤差做了有效評估.
衛星導航信號,碼時延估計誤差,評估方法
1 引 言
衛星導航系統能夠為用戶提供高質量的定位、導航和授時(positioning,navigation and timing,PNT)服務,在國防、航空、金融以及電力等眾多領域獲得了非常廣泛的應用,并展現出了巨大的軍事價值和經濟價值[1,2].隨著衛星導航應用領域的不斷拓展,軍民用戶對PNT性能的需求不斷提高,而采用更加先進的導航信號調制與復用技術是提升PNT性能的關鍵[3].因此,在新一代衛星導航系統升級與建設的需求下,導航信號調制與復用技術取得了重大進展.截至目前,已提出了多種單個信號分量的調制方式[4?13]和多路信號分量的恒包絡復用方法[14?18],新的信號體制仍在陸續提出,迫切需要對這些信號的碼時延估計誤差性能做出有效評估,進而為接下來各系統的選用提供重要的參考依據.因此,需要建立完善的衛星導航信號碼時延估計誤差性能評估方法.
碼時延估計誤差的大小不僅與信號體制有關,與衛星導航接收機的接收模式和碼跟蹤環路的處理方式也緊密相關.新一代衛星導航接收機的接收模式可分為兩種類型:一種是繼續采用傳統的完整接收模式,參考信號與接收信號相同,即匹配接收.理論上該接收模式下可以得到最佳的碼跟蹤性能,但是在處理二進制偏移載波(binary o ff set carrier,BOC)類信號時存在碼跟蹤模糊的問題,會導致嚴重的錯誤結果;另一種是參考信號與接收信號不再相同,即非匹配接收.目前,非匹配接收模式在BOC類信號處理中得到了廣泛應用.為了消除跟蹤模糊問題,通常用傳統的二進制相移鍵控(binary phase shifting keying,BPSK)信號作為參考信號只接收BOC類信號的其中一個邊帶[19?22],或者通過構造特殊的參考信號實現兩個邊帶的綜合接收[23?25].另外,為了降低接收機的帶寬以及復雜度,有時也用低階的BOC信號接收高階的BOC類信號,如用BOC(1,1)信號接收復用BOC(multiplex BOC,MBOC)(6,1,1/11)信號[26,27],所需帶寬僅為原來的六分之一.無論是匹配模式還是非匹配模式的導航接收機,它們的碼跟蹤環路都包括相干處理和非相干處理兩種情況.因此,導航接收機總共可劃分為四種類型:匹配模式下相干處理、匹配模式下非相干處理、非匹配模式下相干處理以及非匹配模式下非相干處理.由于每種類型下的碼時延估計誤差都不相同,因而需要給出每種類型下的碼時延估計誤差評估方法.文獻[28,29]分別推導了匹配模式下相干和非相干處理時的碼時延估計誤差,其中文獻[28]也推導了碼時延估計誤差的克拉美羅下界(Cramér-Rao lower bound,CRLB),文獻[30]推導了非匹配模式下相干處理時的碼時延估計誤差,這些結果得到了廣泛應用.但是,目前還沒有文獻對非匹配模式下非相干處理時的碼時延估計誤差進行研究,也沒有給出適合各種條件的碼時延估計誤差評估方法.
為此,本文推導了非匹配模式下非相干處理時的碼時延估計誤差,并分別討論了在不同噪聲環境以及碼環間隔下同其他三種類型碼時延估計誤差之間的關系.上述四種類型的結果都是在碼時延估計誤差非常小這一假設條件下推導而來,但在復雜環境下載噪比較低時,碼時延估計誤差并不滿足假設條件,此時就無法應用上述的結果進行評估.因此,本文又推導了導航信號碼時延估計誤差的齊夫-扎凱界(Ziv-Zakai bound,ZZB),ZZB的推導不需要碼時延估計誤差非常小的假設條件,很好地解決了低載噪比條件下碼時延估計誤差的評估.因此,結合已有的成果,本文給出了適用于各種情況的碼時延估計誤差評估方法,所有的誤差表達式均以導航信號的功率譜密度表示,給具體信號的評估帶來了很大方便.
本文第2部分給出了基帶接收信號模型;第3部分給出了接收機碼跟蹤環路模型;第4部分推導了非匹配模式下導航信號的碼時延估計誤差;第5部分推導了碼時延估計誤差的ZZB;第6部分為仿真分析;最后為結論.
2 基帶接收信號模型
不同調制方式的導航信號經過接收機前端濾波后,基帶信號均可表示為

式中,s(t)為導航信號,其擴頻碼可能經過導航電文或二次碼的調制,平均功率和歸一化功率譜密度分別為Cs和Gs(f),即為碼時延,取值在0到一個碼片Tc之間;θ為載波初始相位,在[0,2π]上均勻分布;w(t)=n(t)+l(t)為噪聲,其中n(t)是雙邊功率譜密度為N0/2的高斯白噪聲,l(t)是功率譜密度為ClGl(f)的窄帶干擾,即
3 接收機碼跟蹤環路模型
現代導航接收機中碼跟蹤環路通常采用延遲鎖定環(delay lock loop,DLL),包括相干延遲鎖定環(coherent DLL,CDLL)和非相干延遲鎖定環(non-coherent DLL,NDLL)兩種類型,分別對應相干處理和非相干處理,實際應用根據具體的信號環境而定[1].圖1給出了典型的碼跟蹤環路模型.
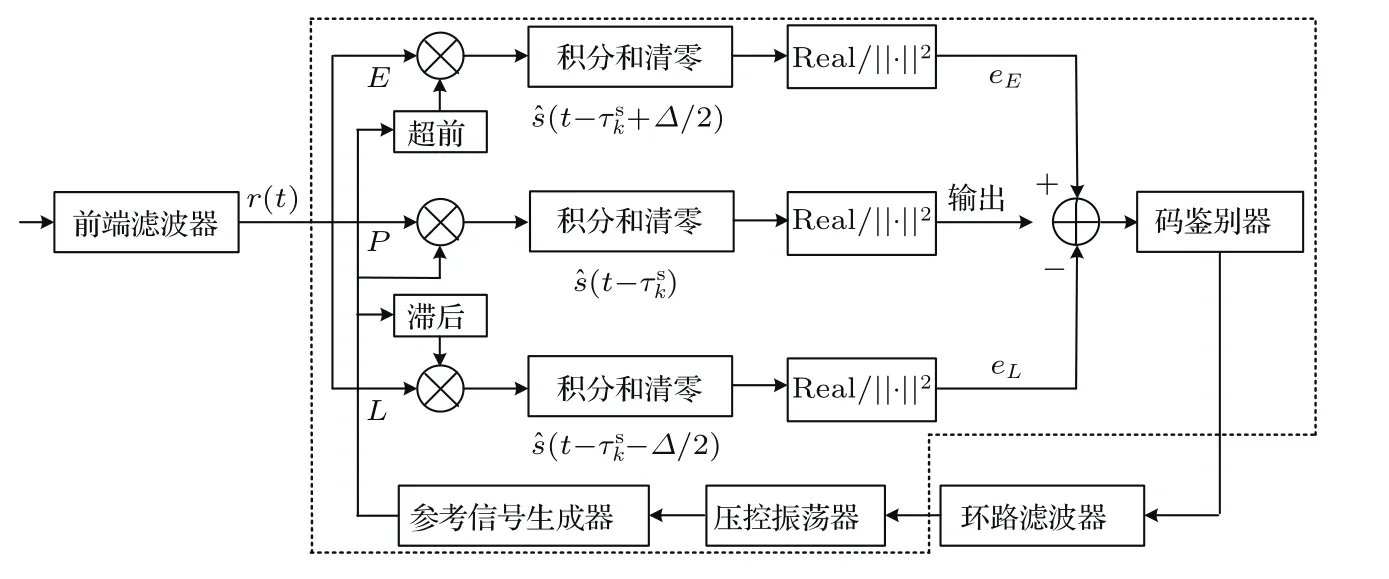
圖1 典型的導航接收機碼跟蹤環路模型Fig.1.Model of typical navigation receiver’s code tracking loop.
圖1模型中,實部Real和模的平方∥·∥2分別對應CDLL和NDLL.根據基帶接收信號r(t)與參考信號?s(t)是否相同分為匹配接收模式和非匹配接收模式.將圖1中的虛線部分抽象為開環估計器以后,可得到圖2的等效模型.
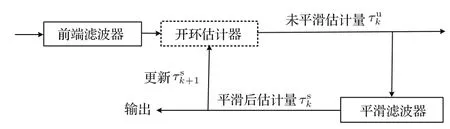
圖2 典型導航接收機碼跟蹤環路的等效模型Fig.2. Equivalent model of typical navigation receiver’s code tracking loop.
圖2模型中,開環與閉環之間的關系更加清晰.討論碼時延估計誤差的前提是碼跟蹤環路是收斂的,通常對收斂的保守估計方法是:三倍的碼時延估計誤差均方差不得超過鑒別器牽入范圍的一半[1],即

(2)式中σtDLL為熱噪聲均方差,Re為碼環受到的動態引力誤差,d為鑒別器牽入范圍的一半.需要注意的是(2)式假定碼環未受載波環的輔助,當載波環輔助時范圍會更大,具體可參考文獻[1].文獻[28]推導了平滑估計量的方差與未平滑估計量的方差之間的關系為

其中,BL為平滑濾波器的單邊帶寬,T為積分時間.(3)式為碼時延估計誤差的推導提供了極大便利.文獻[28]中分別推導了碼時延估計誤差的CRLB以及匹配接收模式下采用CDLL時的碼時延估計誤差,其表達式分別為
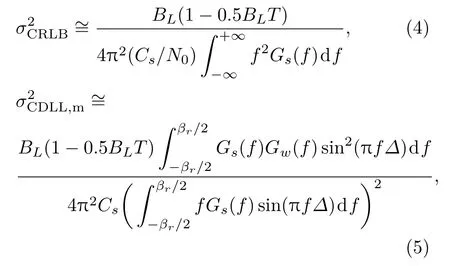
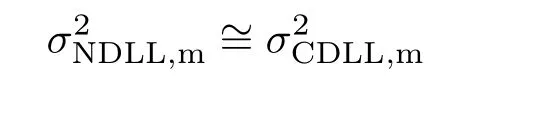
(5)式中?為碼環間隔.文獻[29]中推導了匹配接收模式下采用NDLL時的碼時延估計誤差:

(4)式反映了導航信號所能達到的最高理論測距精度,其中,積分項稱為Gabor帶寬,反映信號本身的測距能力.Gabor帶寬值越大,信號的測距精度越高,這為導航信號設計指明了一個目標,就是使得信號的功率譜密度盡可能多地占用通帶內的高頻分量.文獻[13]提出了Gabor帶寬的最優化方法.
4 非匹配模式下導航信號的碼時延估計誤差
4.1 相干處理時導航信號的碼時延估計誤差
針對相干處理的情況,文獻[30]推導了白噪聲環境下的碼時延估計誤差,但存在干擾時的結果與其相似,下面給出存在干擾時的結果.
當噪聲w(t)中不存在窄帶干擾n(t)時,(8)式可以簡化為
(10)式就是(5)式不含干擾時的結果,其中,CNR=Cs/N0表示載噪比,當碼環間隔?→ 0時,(10)式又可進一步簡化為
此時(11)式退化為(4)式的結果,也就是碼時延估計誤差的CRLB.這說明隨著碼環間隔?變小,碼時延估計誤差性能提高,主要是因為窄的碼環間隔具有良好的抗多徑能力,從而改善了碼時延估計誤差性能.但是實際中碼環間隔?不能太小,否則影響接收機的動態范圍.對于任意的碼環間隔?,可以證明(11)式均小于(10)式.
4.2 非相干處理時導航信號的碼時延估計誤差


將附錄A中的(A10)式代入(13)式后,化簡可得
通過與(7)式的比較發現,(15)式中括號外的部分就是相干條件下的方差因此可進一步寫為
當噪聲w(t)中只含高斯白噪聲時,Gw(f)=N0,結合(9)和(16)式可以表示為
當碼環間隔? → 0時,結合(11)和(17)式進一步簡化為
從(16)—(19)式中可以看出,無論是否匹配接收、碼環間隔是否趨于零以及噪聲是否為高斯噪聲,非相干處理與相干處理時的碼時延估計誤差都存在相似的關系,即非相干處理時的誤差σ2NDLL等于相干處理時的誤差σ2CDLL與因式[1+αSL]的乘積,其中因式αSL為非相干處理帶來的平方損耗.
上述討論的各種誤差結果,均是在假設碼時延估計誤差非常小的條件下推導而來.如本文結果的推導中,在附錄A的(A6)式向(A7)式的推導過程中就需要用到假設條件.上述各種結果的推導均基于相同的假設條件,下面對其進行近似:

(20)式中的兩個近似等式可看作是等價的.因此,由sin(x)的泰勒級數可得,當誤差滿足ε<1/(20πf)時,(20)式中的近似足夠精確.由于前端濾波器的雙邊帶寬為2βr,因此可以得到誤差需要滿足的條件為

需要注意的是,由于信號的功率譜密度Gs(f)在帶寬外迅速衰減,因而帶寬外的f2Gs(f)對Gabor帶寬的貢獻越來越小.因此,(21)式是最嚴格的條件,對于具體的導航信號,誤差ε的條件會進一步放寬.當誤差不滿足假設條件時,上述結果均不再適用.從碼時延估計誤差的表達式也可以看出,碼時延估計誤差隨著載噪比的減小而一直增加.但從導航信號捕獲和跟蹤環節來看,信號完成捕獲后碼時延的不確定度在半個碼片以內,也就是說跟蹤階段的任何碼誤差應該小于半個碼片.產生這種問題的原因在于碼時延估計誤差較大時,上述結果便不再成立.
5 碼時延估計誤差的ZZB
導航信號的碼時延估計過程可以等效為一個對所有可能時延的判斷過程.假設?t0為估計時延,接收信號s(t)是兩個等概率信號s(t?x)或s(t?x?τ)中的一個,其中,x和x+τ分別表示兩個等概率信號的時延.導航信號碼時延的不確定范圍在一個擴頻碼片持續時間Tc以內,因而x和x+τ的取值范圍均為[0,Tc].因此,進行以下估計是合理的:

(22)式正好是一個二元假設檢驗問題,在平均錯誤概率最小條件下是最優的.當接收信號為r(t)=s(t?t0)+n(t)時,二元假設檢驗問題的最小錯誤概率可寫為[31,32]
是標準正態分布的概率表述;d2(τ,x)表示信號之間的平均距離,
(24)式中,積分上限T表示信號的持續時間.在最小錯誤概率Pmin(x,x+τ)下,對于估計誤差ε=t0?0,則估計過程中的均方誤差可推導為[31,32]
(26)式中ET表示T內信號s(t)的能量,
表示s(t)的自相關函數.假設信號s(t)的功率譜密度為CsGs(f),且滿足
Gs(f)為偶函數,Cs為平均功率.由于自相關函數ρT(τ)與功率譜密度CsGs(f)是一對傅里葉變換對,因此可以得到下式:

將(27)式代入(26)式中后可以得到
由于信號能量ET可寫為以下形式:

將(29)式代入(28)式中后可進一步化簡為
將(30)式代入(23)式后可得

(31)式中CNR=Cs/N0代表載噪比,將(31)式代入(25)式后可得到碼時延估計誤差的ZZB的表達式為

由(32)式可以看出,當信號持續時間T越長、載噪比CNR越高時,ZZB的值就越小,即碼時延估計誤差越小,另外,因式
在一定程度上也表達了Gabor帶寬的含義,但是與第3節和第4節的結果相比,都不再是直接的反比關系.假設載噪比CNR足夠小時,即

6 仿真分析
本文對典型導航信號的碼時延估計誤差進行評估,選用的信號包括已經得到應用的BOC(1,1),MBOC(6,1,1/11)和交替BOC(alternative BOC,AltBOC)(15,10)信號以及最新提出的非對稱恒包絡BOC(asymmetric constant envelope BOC,ACEBOC)(15,10)[17]和雙極性副載波(bipolar subcarrier ACEBOC,BS-ACEBOC)(15,10)[18]信號,其中ACEBOC和BS-ACEBOC的功率分配比例設為P=[3,1,3,1],這兩種方式是我國北斗三代系統B2頻點的理想選擇.仿真包括兩個部分:一是匹配接收和非匹配接收時的誤差;二是誤差的ZZB.
仿真1匹配接收和非匹配接收時的誤差
仿真以非相干處理為例,非匹配接收時采用BOC類信號的單邊帶BPSK-Like方法,參考信號為BPSK(1)和BPSK(10)信號,仿真中環路帶寬BL=0.6 Hz,積分時間T=20 ms,碼環間隔?=0.8Tc.仿真中接收機帶寬有多種設置:一是2,4,14以及24 MHz,用于低碼速率信號,其中2 MHz用于BPSK(1)的匹配接收和BOC(1,1)和MBOC(6,1,1/11)的非匹配接收;4 MHz和14 MHz分別用于BOC(1,1)和MBOC(6,1,1/11)的匹配接收,24 MHz用于這兩種信號碼時延估計誤差的CRLB計算;二是20,50以及90 MHz,用于高碼速率信號,其中20 MHz用于BPSK(10)的匹配接收和AltBOC(15,10),ACEBOC(15,10)以及BSACEBOC(15,10)的非匹配接收,50 MHz和90 MHz分別用于這三種雙頻調制信號的匹配接收和碼時延估計誤差CRLB的計算.圖3給出了各信號的Gabor帶寬隨接收機帶寬變化的情況,圖4和圖5分別給出了低碼速率和高碼速率下碼時延估計誤差的均方差隨載噪比的變化情況.
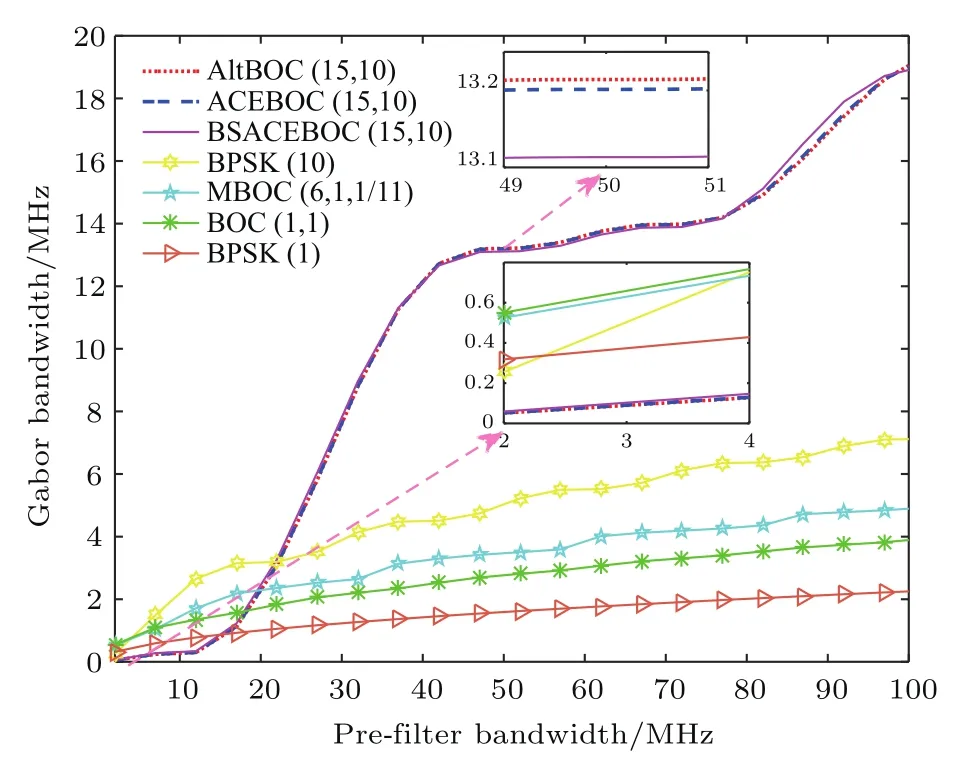
圖3 (網刊彩色)Gabor帶寬隨接收機帶寬的變化Fig.3.(color online)Gabor bandwidth variation with respect to receiver’s bandwidth.
從圖3可以看出,對于低碼速率信號,由于高頻分量BOC(6,1)的存在,MBOC(6,1,1/11)的Gabor帶寬最大,BPSK(1)的最小;對于高碼速率信號,接收帶寬在45 MHz以內或者在80—100 MHz之間時,BS-ACEBOC(15,10)具有一定的優勢,而當接收帶寬在45—80 MHz以內時,BS-ACEBOC(15,10)的Gabor帶寬小于其他兩種信號;在接收帶寬的整個區間,ACEBOC(15,10)和AltBOC(15,10)的Gabor帶寬相當;當接收帶寬在20 MHz以內時,BPSK(10)的Gabor帶寬大于三種復用信號的Gabor帶寬,這主要是因為它們頻譜的主瓣被搬移到中心頻點的兩側.Gabor帶寬決定著信號的碼時延估計誤差性能,Gabor帶寬越大,碼時延估計誤差性能越好.圖3中各信號的Gabor帶寬能夠幫助解釋圖4和圖5的結果.
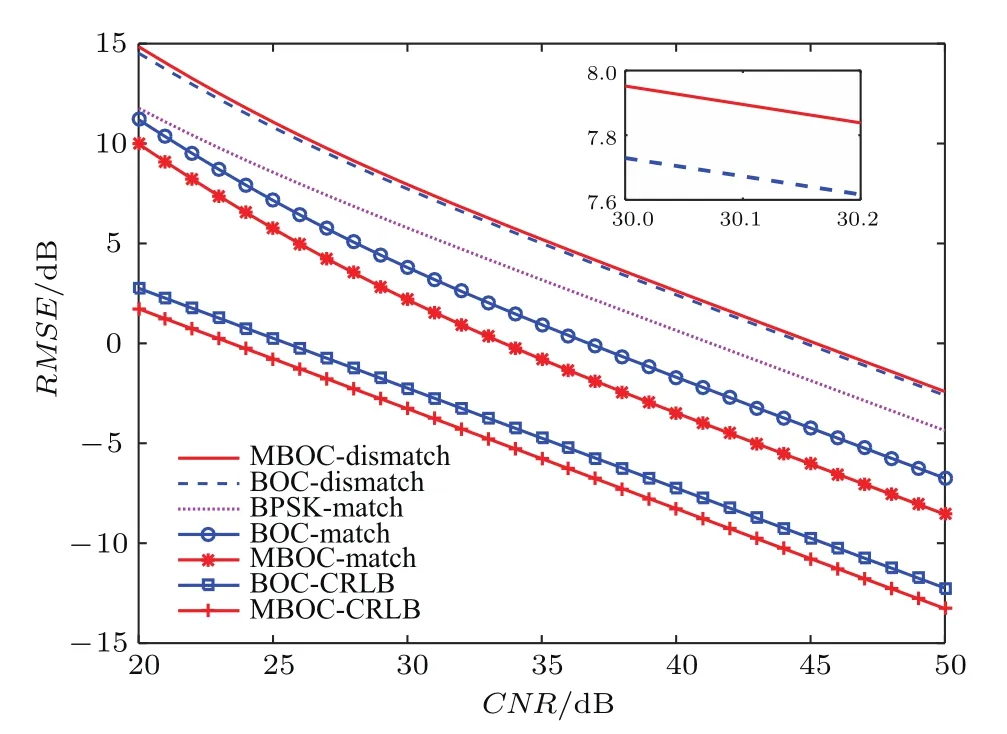
圖4 (網刊彩色)低碼速率信號的碼時延估計誤差隨載噪比的變化Fig.4.(color online)Code delay estimation error of low code rate signals with respect to CNR.
從圖4可以看出,MBOC(6,1,1/11)的碼時延估計誤差的CRLB和匹配接收時的碼時延估計誤差都明顯優于BOC(1,1)信號,這主要是因為對于相應的接收帶寬,MBOC(6,1,1/11)的Gabor帶寬大于BOC(1,1)信號的Gabor帶寬.但在2 MHz帶寬下非匹配接收時,BOC(1,1)的碼跟蹤性能略優于MBOC(6,1,1/11),這與匹配接收和CRLB的結果正好相反.這是因為2 MHz帶寬內MBOC(6,1,1/11)的BOC(6,1)高頻分量被濾除了,只剩下了BOC(1,1)分量,此時剩余的功率分量沒有單純的BOC(1,1)大.與BPSK(1)匹配接收的結果相比,BOC(1,1)和MBOC(6,1,1/11)非匹配接收時碼跟蹤性能損失了約2 dB.
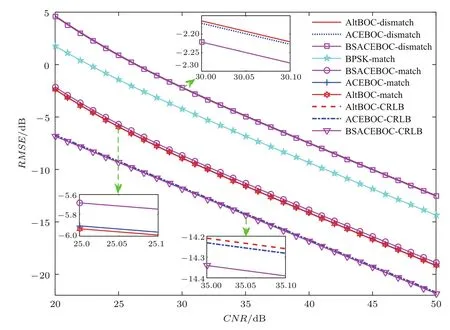
圖5 (網刊彩色)高碼速率信號的碼時延估計誤差隨載噪比的變化Fig.5.(color online)Code delay estimation error of high code rate signals with respect to CNR.
從圖5可以看出,帶寬為90 MHz時,BSACEBOC(15,10)的碼時延估計誤差的CRLB小于其他兩種信號,這是因為此時其Gabor帶寬最大;但在匹配接收時BSACEBOC(15,10)的誤差卻最大,這是因為接收帶寬為50 MHz時,BSACEBOC(15,10)的Gabor帶寬小于其他兩種信號;對于20 MHz帶寬時的非匹配接收,BSACEBOC(15,10)的誤差優于其他兩種信號.需要注意的是,此時與BPSK(10)信號匹配接收的結果相比,三種復用信號的碼跟蹤性能損失了約3 dB.
結合圖4和圖5可以看出,采用單邊帶非匹配接收時,五種BOC類信號的碼跟蹤性能相比于相應的CRLB,性能均約有12 dB的損失;與匹配接收時的碼跟蹤性能相比,約有5—7 dB的性能損失;與參考信號匹配接收時的性能相比約有3 dB的性能損失.這些結論對于區間[20,50]dB·Hz內的任意載噪比都是成立的.非匹配接收時碼跟蹤性能損失的原因主要有三點:一是單邊帶接收造成3 dB的功率損失;二是非匹配接收使得BOC類信號的一些固有性能損失,如自相關函數展寬,這會導致測距精度的降低;三是BOC類信號功率譜密度的最大值并非恰好在與中心頻點相距副載波頻率的位置,而是在稍微靠近中心頻點的位置,這就導致每個邊帶的主瓣與參考信號的主瓣并沒有對齊,從而造成一定的性能損失.產生這種問題的主要原因是BOC類信號上下兩個邊帶之間的相互影響所致.
總之,在BOC類信號的非匹配接收中,是以一定的碼跟蹤性能損失換取自相關函數模糊度的消除以及與傳統信號處理架構的良好兼容,從而降低接收機的復雜度.目前,在一些非高精度要求的接收機中,非匹配接收處理得到了廣泛應用.
仿真2誤差的ZZB
仿真中為了突顯低載噪比下ZZB的性能,載噪比的范圍設置為[?20,40]dB·Hz,而目前接收機能達到的最低值約為10 dB·Hz.同時,為了與ZZB進行性能以及適用場合的分析比較,也給出了CRLB的仿真.
從圖6可以看出,對于低碼速率信號,當載噪比大于約22 dB·Hz時,ZZB和CRLB之間的差距變小并且保持穩定,當載噪比小于約22 dB·Hz時,兩者之間的差距先增大然后減小,在載噪比約等于?13 dB·Hz時兩者重合,隨后ZZB趨于固定值而CRLB一直呈線性增加;高碼速率信號具有與低碼速率信號相似的結論,由于三路高碼速率信號的功率譜非常接近,因而它們的ZZB和CRLB均呈現良好的一致性.當載噪比持續降低時,高碼速率信號和低碼速率信號的ZZB趨于相應的固定值.其中,BPSK(1),BOC(1,1)以及MBOC(6,1,1/11)趨于極限值19.5 dB,而AltBOC(15,10),ACEBOC(15,10)以及BS-ACEBOC(15,10)趨于極限值9.5 dB,這兩個極限值正好滿足理論界限而此時的CRLB則分別約為27 dB和35 dB,遠遠大于ZZB.
從圖6和上述的分析可以得出ZZB和CRLB的應用場合:對于具體的導航信號,在大范圍載噪比區間,如[?20,40]dB·Hz,根據其ZZB和CRLB的對數曲線可以得到它們之間的差距明顯變大時對應的載噪比值,以此載噪比值為界限,當信號的載噪比大于或小于此值時,分別應用CRLB和ZZB對碼時延估計誤差進行評估.
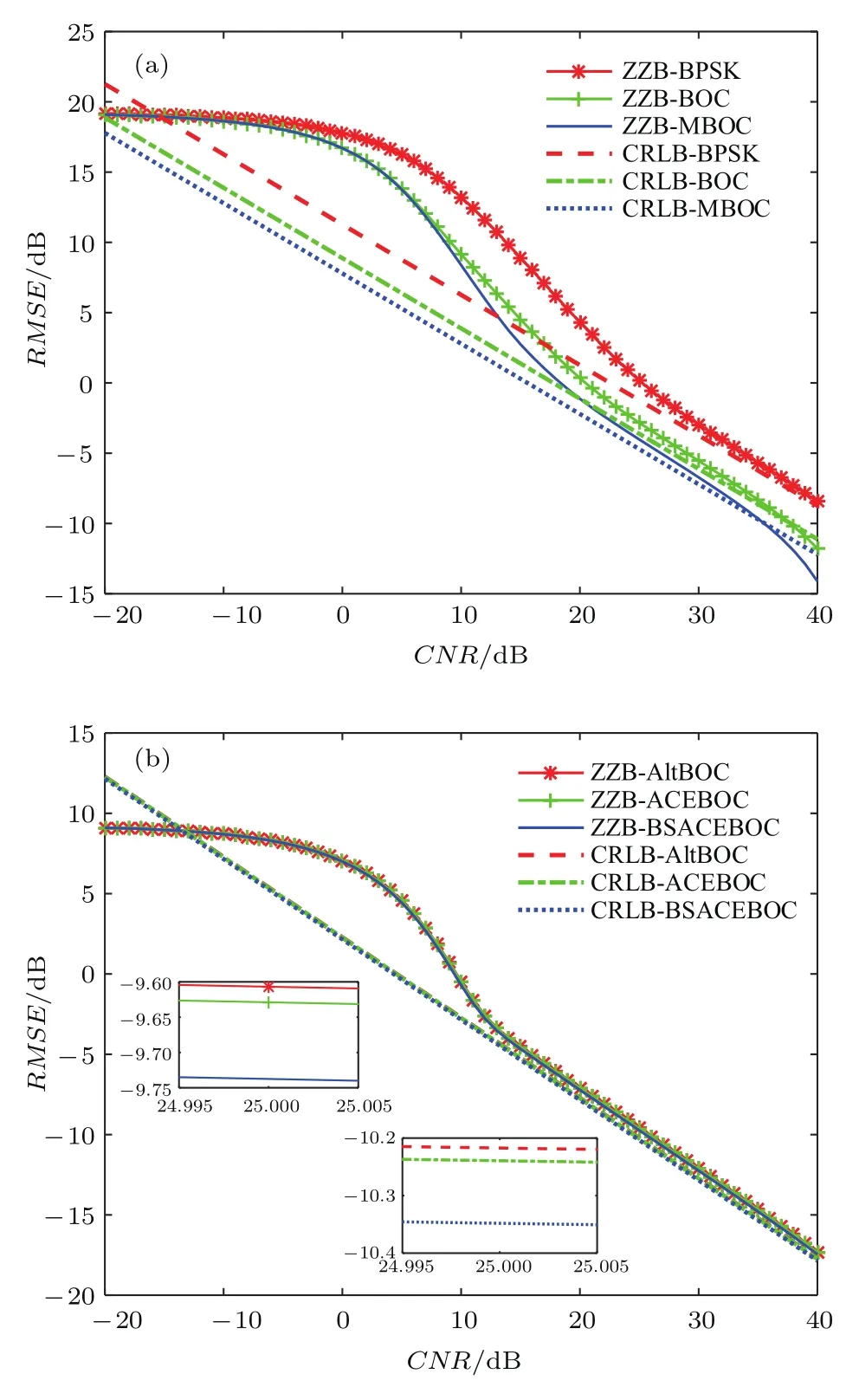
圖6 (網刊彩色)碼時延估計誤差的ZZB和CRLB隨載噪比的變化(a)低碼速率信號;(b)高碼速率信號Fig.6.(color online)The ZZB and CRLB of code delay estimation error with respect to CNR:(a)Low code rate signals;(b)high code rate signals.
7 結 論
本文根據目前導航接收機的結構,概括了碼跟蹤環路的等效模型,根據接收信號與參考信號是否匹配以及碼跟蹤環路中處理方式是否相干,將導航信號碼時延估計誤差的評估歸納為四種類型,在碼時延估計誤差滿足非常小的假設條件下,推導了非匹配模式下非相干處理時的碼時延估計誤差,并討論了同其他三種類型下碼時延估計誤差之間的關系.當碼時延估計誤差不滿足非常小的假設條件時,推導了新的碼時延估計誤差界限,從而給出了適用于各種情況的碼時延估計誤差評估方法.仿真實驗中對典型導航信號的碼時延估計誤差進行了評估,實驗結果與理論分析完全符合.因此,本文方法能在未來導航信號設計以及我國北斗三代系統的信號遴選方面提供重要的指導.
附錄A 非匹配接收模式下非相干處理時碼時延估計誤差的條件方差推導
非相干處理時,根據圖1中的環路模型,此時碼鑒別器的輸入e為超前和滯后支路積分結果的模的平方的差,是k時刻碼時延估計誤差ε=t0?tsk的函數,其表達式可以寫為
假設誤差ε非常小,需要特別注意這一假設條件,不滿足這一假設條件時需要重新討論.在此假設條件下可認為cos(2πfε)≈ 1,sin(2πfε)≈ 2πfε,因此,(A6)式可進一步化簡為
則K被稱為鑒別因子,表示了碼時延估計誤差ε的放大倍數,因此,誤差信號e(ε)可寫為

經過一系列化簡,可得到誤差信號e(ε)的條件方差為
[1]Xie G 2009 GPS Principle and Receiver Design(Beijing:Electronic Industry Press)pp1–4(in Chinese)[謝鋼 2009 GPS原理與接收機設計 (北京:電子工業出版社)第1—4頁]
[2]Wang S Z,Zhu G W,Bai W H,Liu C L,Sun Y Q,Du Q F,Wang X Y,Meng X G,Yang G L,Yang Z D,Zhang X X,Bi Y M,Wang D W,Xia J M,Wu D,Cai Y R,Han Y 2015 Acta Phys.Sin.64 089301(in Chinese)[王樹志,朱光武,白偉華,柳聰亮,孫越強,杜起飛,王先毅,孟祥廣,楊光林,楊忠東,張效信,畢研盟,王冬偉,夏俊明,吳迪,蔡躍榮,韓英2015物理學報64 089301]
[3]Zhu Y H 2016 Ph.D.Dissertation(Beijing:Tsinghua University)(in Chinese)[朱永輝 2016博士學位論文 (北京:清華大學)]
[4]Yao Z,Lu M Q 2016 New Generation Satellite Navigation System Signal Design Principle and Implementation Technology(Beijing:Electronic Industry Press)pp15–20(in Chinese)[姚錚,陸明泉2016新一代衛星導航系統信號設計原理與實現技術 (北京:電子工業出版社)第15—20頁]
[5]Betz J W 1999 Proceedings of the Institute of Navigation’s National Technical Meeting San Diego,USA,January 14–16,1999 p639
[6]Sun Z X,Yu Y,Zhou F,Liu S Z,Qiao G 2014 Acta Phys.Sin.63 104301(in Chinese)[孫宗鑫,于洋,周鋒,劉凇佐,喬鋼2014物理學報63 104301]
[7]Hegarty C J,Betz J W,Saidi A 2004 Proceedings of the 60th Annual Meeting of The Institute of Navigation Dayton,USA,June 7–9,2005 p56
[8]Hein G W,Avila-Rodriguez J A,Wallner S,Pratt A R,Owen J I R,Issler J L 2006 Proceedings of the International Technical Meeting of the Institute of Navigation San Diego,California,USA,April 25–27,2006 p883
[9]Zitounia S,Rouabahb K,Chikouchec D,Mokranie K,Atiab S,Harbaf R,Ravierf P 2016 Aerosp.Sci.Technol.50 112
[10]Betz J W,Cahn C R,Dafesh P A,Hegarty C J,Hudnut K W,Jones A J 2006 Proceedings of the 2006 National Technical Meeting of The Institute of Navigation Monterey,CA,USA,January 18–20,2006 p685
[11]Yao Z,Lu M Q,Feng Z M 2010 Sci.China:Phys.Mech.Astron.40 575(in Chinese)[姚錚,陸明泉,馮振明 2010中國科學:物理學力學天文學40 575]
[12]Avila-Rodriguez J A 2008 Ph.D.Dissertation(Munich:University FAF Munich)
[13]Zhang X M,Yao Z,Lu M Q 2011 Sci.China:Phys.Mech.Astron.54 1077
[14]Lestarquit L,Artaud G,Issler J L 2008 Proceedings of the 21st International Technical Meeting of the Satellite Division of the Institute of Navigation Savannah,GA,USA,September 16–19,2008 p961
[15]Tang Z P,Zhou H W,Wei J L,Yan T,Liu Y Q,Ran Y H,Zhou Y L 2011 Sci.China:Phys.Mech.Astron.54 1014
[16]Shivaramaiah N C,Dempster A G,Rizos C 2013 IEEE Trans.Aerosp.Electron.Syst.49 1119
[17]Yao Z,Zhang J Y,Lu M Q 2016 IEEE Trans.Aerosp.Electron.Syst.52 466
[18]Guo F,Yao Z,Lu M Q 2016 GPS Solut.20 1
[19]Martin N,Leblond V,Guillotel G,Heiries V 2003 Proceedings of the 16th International Technical Meeting of the Satellite Division of the Institute of Navigation Portland,OR,USA,September 9–12,2003 p188
[20]Hodgart M S,Blunt P D 2007 Electron.Lett.43 877
[21]Shivaramaiah N C,Dempster A G,Rizos C 2009 Proceedings of the European Navigation Conference on Global Navigation Satellite Systems Citeseer,Braunschweig,Germany,October 19–21,2009 p1
[22]Benedetto F,Giunta G,Lohan E S,Renfors M 2013 IEEE Trans.Veh.Technol.62 1350
[23]Yao Z,Cui X W,Lu M Q,Feng Z M 2010 IEEE Trans.Aerosp.Electron.Syst.46 1782
[24]Yan T,Wei J,Tang Z P,Qu B,Zhou Z H 2015 Wireless Pers.Commun.84 2835
[25]Yan T,Wei J L,Tang Z P 2015 GPS Solut.19 623
[26]Lohan ES 2010 Proceedings of the Institute of Navigation Indian Wells,USA,May 4–6,2010 p245
[27]Macchi F,Petovello M G,Lachapelle G 2008 Proceedings of the Institute of Navigation Savannah,GA,USA,September 16–19,2008 p982
[28]Betz J W,Kolodziejski K R 2009 IEEE Trans.Aerosp.Electron.Syst.45 1538
[29]Betz J W,Kolodziejski K R 2009 IEEE Trans.Aerosp.Electron.Syst.45 1551
[30]Yao Z,Lu M Q 2011 Electron.Lett.47 878
[31]Brian M S,Liu N,Xu Z Y 2010 IEEE Trans.Signal Process.58 2729
[32]Dan C,Moshe Z,Jacob Z 1975 IEEE Trans.Inform.Theory 21 90
PACS:91.10.Fc,84.40.Ua,89.70.–aDOI:10.7498/aps.66.129101
Universal evaluation criteria for code delay estimation error of satellite navigation signals?
Liu Zhen1)?Zhang Jia-Yi2)Lu Ming-Quan2)Huang Jie1)Zhao Yong-Jun1)
1)(School of Navigation and Aerospace Target Engineering,Information Engineering University,Zhengzhou 450001,China)
2)(Department of Electronic Engineering,Tsinghua University,Beijing 100084,China)
13 March 2017;revised manuscript
6 April 2017)
With the system upgrading and construction demand for new generation global navigation satellite system(GNSS),the navigation signal modulation and multiplexing technology have made great progress.Up to now,many modulation modes for single signal component and many constant-envelope multiplexing methods for multiple signal components have been proposed,meanwhile the new signal structure continues to be presented.The satellite navigation signal code delay estimation error is the most critical factor that determines system service performance.Therefore,it is urgent to give an overall performance evaluation on code delay estimation error of GNSS signals with di ff erent modulation and multiplexing modes,and consequently provide a crucial selection basis for subsequent system application.The code delay estimation error is related to not only signal structure,but also receiver’s receiving model and processing method of code tracking loop.The receiving models of new generation navigation receivers can be classi fi ed as two types.One is matched receiving model which means that the reference signal is the same as receiving signal,and the other is unmatched receiving model,where the reference signal is not the same as receiving signal.Recently,the unmatched receiving model has been extensively applied to the processing of binary o ff set carrier class signals.
Therefore,in this paper we propose an integrated evaluation method for code delay estimation error of navigation signals.Firstly,the equivalent model for the code tracking loop of navigation receivers is generalized and the current navigation receivers are classi fi ed as four types based on whether matched receiving or coherent processing is used.Because the code delay estimation error is dependent on the type,it is necessary to provide an evaluation method for each type.Then,on the assumed condition that the code delay estimation error is very small,the expressions of code delay estimation error for coherent processing and non-coherent processing under matched receiving model are respectively presented and the relationships between each other are discussed under various noise environments and the code loop interval going to zero.The expression of code delay estimation error for non-coherent processing under unmatched receiving model is derived and the relationship with coherent processing is discussed under the same condition as matched receiving model.Finally,the Ziv-Zakai bound of code delay estimation error is derived,which provides a perfect evaluation method when the code delay estimation error is not very small.The proposed method is expressed by power spectrum density of navigation signals,which provides important theoretical guidance for signal design and receiver development,and simultaneously brings great convenience to the evaluation of the signal.Simulation experiment attests to e ff ective evaluation on the code delay estimation error of new generation typical navigation signals.
satellite navigation signals,code delay estimation error,evaluation criteria
10.7498/aps.66.129101
?國家自然科學基金(批準號:D040103)資助的課題.
?通信作者.E-mail:liuzheninformation@163.com
?2017中國物理學會Chinese Physical Society
http://wulixb.iphy.ac.cn
*Project supported by the National Natural Science Foundation of China(Grant No.D040103).
?Corresponding author.E-mail:liuzheninformation@163.com
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
