民機(jī)航電RIG ARINC429總線抽引研究
2017-08-09 01:30:49全軼青
環(huán)球市場(chǎng)信息導(dǎo)報(bào) 2017年29期
全軼青
民機(jī)航電RIG ARINC429總線抽引研究
全軼青
當(dāng)前主流的商用客機(jī)航電系統(tǒng)架構(gòu)及其設(shè)備之間都是通過(guò)ARINC429總線進(jìn)行聯(lián)接的,文章通過(guò)對(duì)航電RIG的總線抽引進(jìn)行研究,提出方法與建議。
隨著航空電子技術(shù)的發(fā)展,航電系統(tǒng)向著高度綜合、集成的方向不斷邁進(jìn),總線被大量的使用,無(wú)論是ARINC429總線還是ARINC664總線,在工程人員進(jìn)行系統(tǒng)設(shè)計(jì)、分析或故障排查時(shí),都需要對(duì)它們進(jìn)行抽引、觀察和分析。而ARINC429又是總線研究的基礎(chǔ),也是當(dāng)前正被廣泛使用的總線方式;即使未來(lái)機(jī)型逐步使用AFDX網(wǎng)絡(luò),但目前設(shè)備端和進(jìn)入網(wǎng)絡(luò)之前所進(jìn)行的數(shù)據(jù)傳輸仍要依靠ARINIC429總線。
航電RIG平臺(tái)中ARINC429總線抽引的意義
航電系統(tǒng)的RIG結(jié)合鐵鳥(Iron Bird)試驗(yàn)平臺(tái)是一種地面工程模擬器,用于組合、模擬、試驗(yàn)、驗(yàn)證和優(yōu)化所設(shè)計(jì)的飛機(jī)系統(tǒng),包括導(dǎo)航、飛控及其他航電系統(tǒng)。現(xiàn)代的航電RIG平臺(tái),無(wú)論是設(shè)備端還是系統(tǒng)之間的聯(lián)接都需要大量使用ARINC429總線;隨著航電系統(tǒng)技術(shù)和集成度的提升,AFDX網(wǎng)絡(luò)會(huì)逐步應(yīng)用于系統(tǒng)級(jí)的交聯(lián),但由于技術(shù)、成本的考慮以及對(duì)傳統(tǒng)設(shè)備的依賴,依然無(wú)法全面取代ARINC429總線的使用。
在飛機(jī)研制期間,系統(tǒng)的設(shè)計(jì)及調(diào)試使得工程人員必須時(shí)刻掌握總線數(shù)據(jù)的傳輸;當(dāng)需要進(jìn)行系統(tǒng)排故時(shí),時(shí)常需要在RIG上觀察和分析總線傳輸定義及內(nèi)容,以定位故障;在設(shè)備軟硬件升級(jí)時(shí),更要先進(jìn)行RIG平臺(tái)的測(cè)試才能實(shí)現(xiàn)裝機(jī)。如此,對(duì)于工程人員,在試驗(yàn)平臺(tái)級(jí)別的活動(dòng)中,如何按需抽引所需的總線信號(hào)就變得格外重要。
ARINC429總線
ARINC429總線協(xié)議是美國(guó)航空電子工程委員會(huì)(ARINC)提出的,全稱為數(shù)字式信息傳輸系統(tǒng),協(xié)議標(biāo)準(zhǔn)規(guī)定了航空電子設(shè)備及有關(guān)系統(tǒng)間的數(shù)字信息傳輸要求。ARINC429總線廣泛應(yīng)用在波音、空客及其他商用客機(jī)中。
抽引方案
本文章主要研究RIG平臺(tái)中ARINC429總線的抽引方法。航電RIG一般包含諸多子系統(tǒng)包括飛控系統(tǒng)、飛管系統(tǒng)、通信系統(tǒng)、導(dǎo)航系統(tǒng)、起落架系統(tǒng)等等。每個(gè)子系統(tǒng)由具有不同功能的字(LABLE)和數(shù)據(jù)位(BIT)組成,從RIG中可以得到成百上千的字和數(shù)據(jù)。
圖1給出了抽引方案和步驟,在抽引數(shù)據(jù)之前,首先要判定需要什么數(shù)據(jù),然后工程人員將所需數(shù)據(jù)從ARINC429測(cè)試板(Patch Panel)中抽引出,再通過(guò)專用電纜,發(fā)送到計(jì)算機(jī)進(jìn)行數(shù)據(jù)轉(zhuǎn)換,最終數(shù)據(jù)由接收器進(jìn)行處理,并轉(zhuǎn)換成所需的可讀、可用數(shù)據(jù)。文章以航電系統(tǒng)重要的3個(gè)飛機(jī)姿態(tài)參數(shù)俯仰(Pitch)、滾轉(zhuǎn)(Roll)和偏航(Yaw)作為抽引所需數(shù)據(jù)。
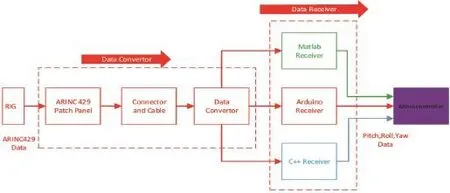
圖1 總線抽引方案和步驟
實(shí)施方法
根據(jù)章節(jié)3給出的抽引方案和步驟,給出詳細(xì)的實(shí)施方法。
RIG平臺(tái)和Patch Panel。RIG平臺(tái)和Patch Panel可以提供大多數(shù)在ARINC429總線上傳輸?shù)暮诫姅?shù)據(jù),所需的3個(gè)航電系統(tǒng)的飛機(jī)姿態(tài)參數(shù)(Pitch、Roll和Yaw)均可以從中得到。
專用連接器、電纜和ARINC429板卡。專用連接器和電纜是專用于采集RIG平臺(tái)中的數(shù)據(jù),然后數(shù)據(jù)被輸出到計(jì)算機(jī)中,由ARINC429板卡進(jìn)行數(shù)據(jù)處理和轉(zhuǎn)換。
數(shù)據(jù)轉(zhuǎn)換。所有的ARINC429數(shù)據(jù)都能夠被處理并轉(zhuǎn)換成可讀、可辨識(shí)的所需參數(shù)。
數(shù)據(jù)發(fā)送。最終,數(shù)據(jù)通過(guò)浮點(diǎn)(float)數(shù)據(jù)的方式被傳輸進(jìn)入Ethernet,工程人員可以從中選擇任何所需數(shù)據(jù)用于各自的項(xiàng)目。
ARINC429數(shù)據(jù)接收器。在完成上述數(shù)據(jù)轉(zhuǎn)換后,可以使用3種不同的方法從Ethernet來(lái)接收這些數(shù)據(jù)——C++(Microsoft Visual Studio),Matlab和Arduino Ethernet Shield控制板。
C++(Microsoft Visual Studio):首先數(shù)據(jù)以浮點(diǎn)(float)的形式被發(fā)送至Ethernet,在接收到串行數(shù)據(jù)(string data)后,編譯代碼使用逗號(hào)(comma)來(lái)分割(delimiting)每一個(gè)參數(shù),最后使用緩存器(buffer)在隊(duì)列(array)中選擇并存儲(chǔ)pitch、roll和yaw這3個(gè)參數(shù),再輸出它們。
Matlab:Matlab和Simulink提供了另一種方式來(lái)讀取可用參數(shù)。首先通過(guò)使用UDP模塊,使得Ethernet中的數(shù)據(jù)可以傳輸并被接收,然后同樣需要分割所捕獲的串行數(shù)據(jù),并發(fā)送至Arduino接口。最終,輸出3個(gè)飛行姿態(tài)參數(shù)。注意,如果想要持續(xù)不斷地得到ARINC429數(shù)據(jù),必須仔細(xì)核實(shí)與RIG平臺(tái)連接的計(jì)算機(jī)IP地址,并設(shè)置循環(huán)(loop),不斷重復(fù)串行數(shù)據(jù)分割和數(shù)據(jù)發(fā)送指令。
Arduino Ethernet Shield控制板:Arduino Ethernet Shield是一種較為簡(jiǎn)單的方法,可以直接得到Ethernet中的串行數(shù)據(jù)。建議將其安裝在Mega2560控制板,并通過(guò)電纜與Ethernet連接。在數(shù)據(jù)被接收后,繼續(xù)使用分割串行數(shù)據(jù)的方法來(lái)取得可讀參數(shù)并輸出。
本文給出了從RIG平臺(tái)抽引ARINC429總線數(shù)據(jù)的方法,并以航電系統(tǒng)中重要的3個(gè)飛行姿態(tài)參數(shù)為例子,提供了詳細(xì)的實(shí)施方案與步驟,并推薦了3種不同的接收器設(shè)計(jì)方法。
通過(guò)此項(xiàng)研究,對(duì)基于RIG平臺(tái)的航電系統(tǒng)研制及故障排查,提供了總線數(shù)據(jù)抽引方法,具有一定的參考價(jià)值。
(作者單位:上海飛機(jī)設(shè)計(jì)研究院)
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
太空探索(2016年6期)2016-07-10 12:09:06
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
筑路機(jī)械與施工機(jī)械化(2015年11期)2015-07-01 16:28:43
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
筑路機(jī)械與施工機(jī)械化(2015年8期)2015-01-11 09:24:54
