基于模型預(yù)測(cè)控制的無(wú)人駕駛汽車的軌跡跟蹤*
2017-08-17 03:18:14李金良郝亮曹植
汽車工程師 2017年10期
李金良 郝亮 曹植
(遼寧工業(yè)大學(xué))

隨著計(jì)算機(jī)信息處理技術(shù)、傳感器技術(shù)和汽車控制技術(shù)的進(jìn)步,基于高效環(huán)境感知的輔助駕駛技術(shù)或全自動(dòng)駕駛技術(shù)迅速發(fā)展,以主動(dòng)控制為核心的先進(jìn)汽車安全技術(shù)必將是現(xiàn)代交通系統(tǒng)和未來(lái)高度智能化交通系統(tǒng)的核心技術(shù)之一[1-2]。實(shí)現(xiàn)對(duì)全自主無(wú)人駕駛汽車在高速和冰雪等復(fù)雜路面安全穩(wěn)定的軌跡跟蹤控制具有十分重要的意義。由于線性時(shí)變模型預(yù)測(cè)控制算法相比于非線性模型預(yù)測(cè)控制算法具有計(jì)算簡(jiǎn)單和實(shí)時(shí)性好等優(yōu)點(diǎn)[3],因此,文章通過(guò)MATLAB/Simulink軟件搭建基于運(yùn)動(dòng)學(xué)模型的線性時(shí)變模型預(yù)測(cè)控制算法,研究在給定工況下的軌跡跟蹤特性。
1 線性時(shí)變模型預(yù)測(cè)控制原理
以線性狀態(tài)控制模型為基礎(chǔ),依次推導(dǎo)模型預(yù)測(cè)控制的預(yù)測(cè)方程、優(yōu)化求解及反饋機(jī)制[4]。
1.1 預(yù)測(cè)方程
首先考慮離散線性化模型:

式中:x(k)——n維狀態(tài)變量;
u(k)——m維控制輸入變量;
Ak,t——狀態(tài)變量系數(shù)矩陣;
Bk,t——控制變量系數(shù)矩陣。
為了使整個(gè)離散化模型的關(guān)系更加明確,將系統(tǒng)未來(lái)時(shí)刻的輸出以矩陣的形式表達(dá):


式中:η(t)——預(yù)測(cè)時(shí)域Np內(nèi)的變形后系統(tǒng)輸出變量;
ξ(t)——預(yù)測(cè)時(shí)域Np內(nèi)的變形后系統(tǒng)狀態(tài)變量;
Ct——輸出系數(shù)矩陣;
ΔU(t)——控制時(shí)域Nc內(nèi)的系統(tǒng)輸入增量;
ψt——變形后的系統(tǒng)輸入變量狀態(tài)矩陣;
θt——變形后的系統(tǒng)輸入增量狀態(tài)矩陣。
通過(guò)觀察式(2),可以看到,在預(yù)測(cè)時(shí)域內(nèi)的狀態(tài)量和輸出量都可以通過(guò)系統(tǒng)當(dāng)前的狀態(tài)量(ξ(t|t))和控制時(shí)域內(nèi)的控制增量(ΔU(t))計(jì)算得到。這也就是模型預(yù)測(cè)控制算法中“預(yù)測(cè)”功能的實(shí)現(xiàn)。
1.2 QP(二次規(guī)劃)問(wèn)題的轉(zhuǎn)化
系統(tǒng)控制時(shí)域(Nc)內(nèi)的 ΔU(t)是未知的,通過(guò)設(shè)定合理的優(yōu)化目標(biāo)函數(shù)并使其最小化,可求得在Nc內(nèi)滿足約束條件的最優(yōu)控制序列。
考慮目標(biāo)函數(shù)如下:

式中:η(t+i|t)——參考輸出量,i=1,…,Np;
ηref(t+i|t)——理想?yún)⒖驾敵隽浚琲=1,…,Np;
Δu(t+i|t)——輸入增量,i=1,…,Nc-1;
Q,R——權(quán)重矩陣。
其中,第1項(xiàng)(Q的2范數(shù))用于懲罰系統(tǒng)在Np內(nèi),輸出量與參考輸出量之間的偏差,即反映了系統(tǒng)對(duì)參考軌跡的快速跟蹤能力;第2項(xiàng)(R的2范數(shù))用于懲罰系統(tǒng)在Nc內(nèi)的控制增量大小,即反映了系統(tǒng)對(duì)控制量平穩(wěn)變化的要求;同時(shí),在實(shí)際的控制系統(tǒng)中,往往需要滿足系統(tǒng)狀態(tài)量及控制量的一些約束條件,一般如下:
控制量約束:
控制增量約束:

輸出約束:

1.3 反饋控制
在每個(gè)控制周期內(nèi)完成對(duì)式(5)求解后,得到了控制時(shí)域內(nèi)的一系列控制輸入增量:

根據(jù)模型預(yù)測(cè)控制的基本原理,將該控制序列中第1個(gè)元素作為實(shí)際的控制輸入增量作用于系統(tǒng),即:

式中:u(t)——系統(tǒng)的實(shí)際控制量。
系統(tǒng)執(zhí)行這一控制量直到下一時(shí)刻。在新的時(shí)刻,系統(tǒng)根據(jù)狀態(tài)信息重新預(yù)測(cè)下一階段時(shí)域的輸出,通過(guò)優(yōu)化過(guò)程得到一個(gè)新的控制增量序列。如此循環(huán)往復(fù),直至系統(tǒng)完成控制過(guò)程。
2 線性時(shí)變模型預(yù)測(cè)控制仿真
2.1MATLAB仿真條件
無(wú)人駕駛汽車從坐標(biāo)原點(diǎn)出發(fā),以期望縱向速度(v=1m/s)跟蹤一條直線軌跡(y=3m),采樣時(shí)間為50ms,仿真總時(shí)間設(shè)定為20 s。
2.2 低速運(yùn)動(dòng)學(xué)模型線性化處理
由于控制目標(biāo)是無(wú)人駕駛汽車在低速情況下的跟蹤控制,因此考慮以汽車運(yùn)動(dòng)學(xué)方程作為預(yù)測(cè)模型,低速情況下的汽車運(yùn)動(dòng)學(xué)方程形式如下[5]:
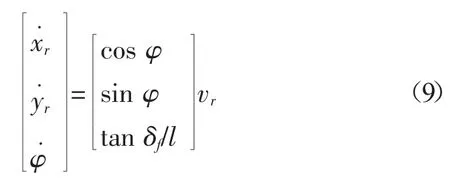
式中:xr,yr——汽車后軸軸心處的橫縱坐標(biāo);
φ——汽車航向角,(°);
δf——前輪轉(zhuǎn)角,(°);
l——汽車軸距,m;
vr——汽車后軸中心的速度,m/s。
對(duì)其進(jìn)行線性化,得到線性時(shí)變模型為:
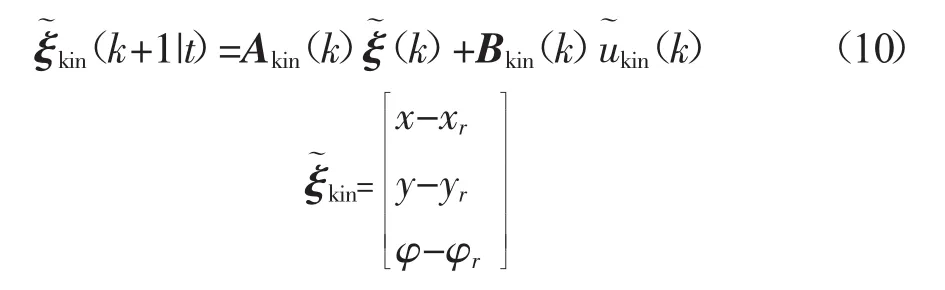
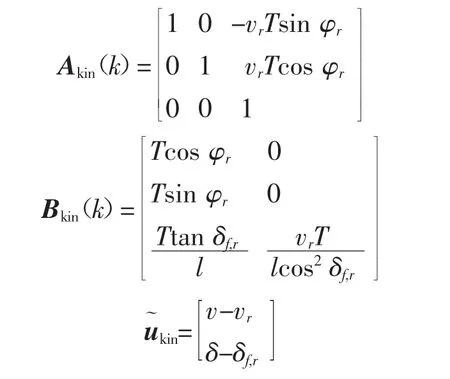
式中:T——采樣時(shí)間,s;
δf,r——汽車在r點(diǎn)的前輪轉(zhuǎn)角,(°)。
2.3 汽車運(yùn)動(dòng)學(xué)模型的驗(yàn)證
為驗(yàn)證所建立的汽車運(yùn)動(dòng)學(xué)模型,在MATLAB/Simulink環(huán)境中搭建該運(yùn)動(dòng)學(xué)模型,對(duì)無(wú)人駕駛汽車的直線軌跡跟蹤過(guò)程進(jìn)行仿真驗(yàn)證,其仿真結(jié)果,如圖1~圖4所示。
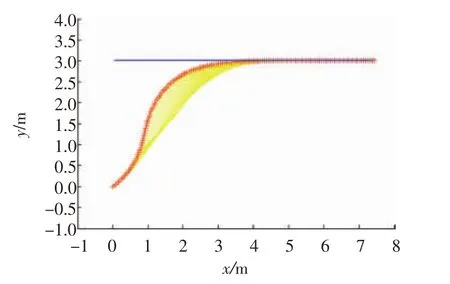
圖1 跟蹤理想軌跡的實(shí)際運(yùn)行結(jié)果
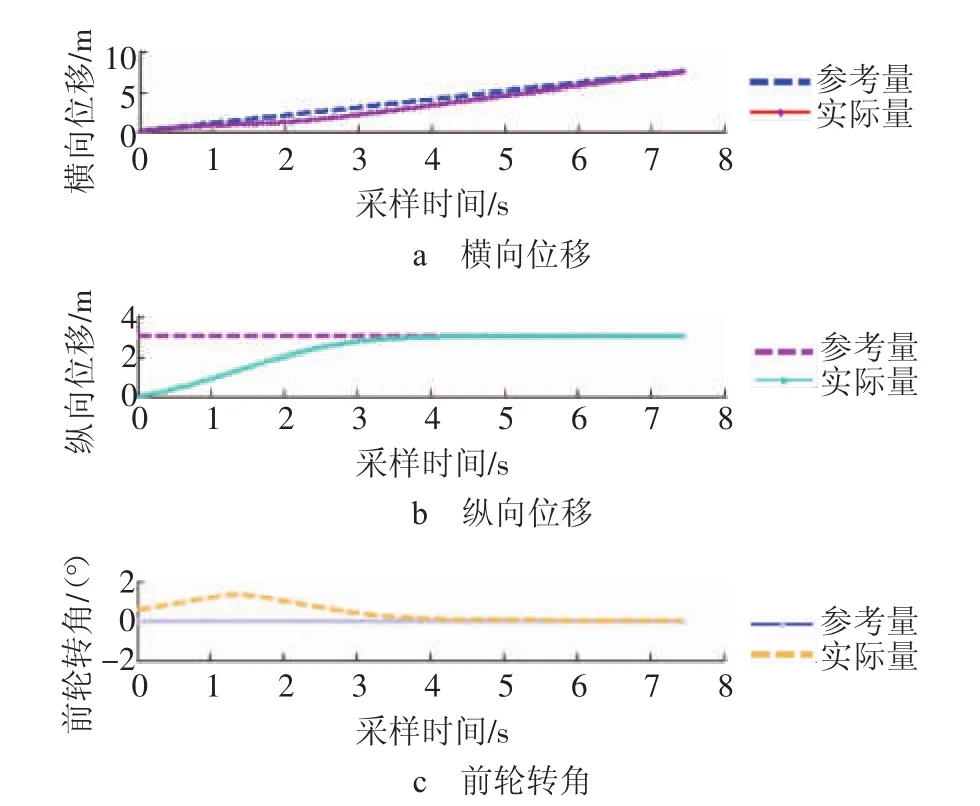
圖2 系統(tǒng)狀態(tài)量隨時(shí)間的變化曲線
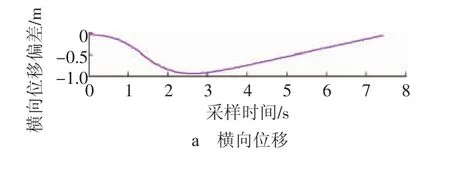
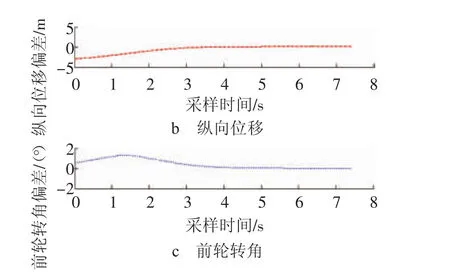
圖3 狀態(tài)量偏差隨時(shí)間的變化曲線

圖4 控制量隨時(shí)間的變化曲線
由圖1可以看出,實(shí)際軌跡從原點(diǎn)出發(fā)能夠跟蹤上真實(shí)直線軌跡(y=3 m);由圖2和圖3可知,汽車的橫向、縱向位移和前輪轉(zhuǎn)角均能很好地跟蹤理想軌跡,最終達(dá)到穩(wěn)定狀態(tài);由圖4可知,無(wú)人駕駛的控制量縱向速度和角加速度均能最終達(dá)到穩(wěn)定的狀態(tài)。
3 結(jié)論
文章通過(guò)線性時(shí)變模型預(yù)測(cè)控制仿真得出,無(wú)人駕駛的狀態(tài)量和控制量均能很好地反映出汽車在跟蹤過(guò)程中,實(shí)際狀態(tài)量均能實(shí)時(shí)跟蹤理想的狀態(tài)量實(shí)時(shí)狀態(tài)變化,最終達(dá)到穩(wěn)定狀態(tài),控制量也經(jīng)過(guò)一定變化達(dá)到最終的穩(wěn)定狀態(tài),這說(shuō)明在低速跟蹤過(guò)程中,線性時(shí)變模型預(yù)測(cè)控制算法能夠?qū)崟r(shí)跟蹤汽車的行駛軌跡,并且保證汽車行駛過(guò)程中的實(shí)時(shí)性和穩(wěn)定性。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
兒童時(shí)代·快樂(lè)苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(jí)(2016年4期)2016-04-18 00:24:37