基于機器視覺的手機轉接口尺寸及管腳數量的測量
2017-08-24 23:14:31陳寶華吳泉英
物理實驗 2017年8期
陳寶華,王 軍,張 皓,吳泉英
(1.蘇州科技大學 數理學院,江蘇 蘇州 215009;2.蘇州科技大學天平學院,江蘇 蘇州 215009)

基于機器視覺的手機轉接口尺寸及管腳數量的測量
陳寶華1,2,王 軍1,2,張 皓1,2,吳泉英1,2
(1.蘇州科技大學 數理學院,江蘇 蘇州 215009;2.蘇州科技大學天平學院,江蘇 蘇州 215009)
基于機器視覺原理實現對手機轉接口尺寸及管腳數量的非接觸式測量. 采用光源、遠心鏡和CCD相機搭建檢測裝置,獲取手機轉接口的圖像數據,并利用圖像邊緣檢測技術實現特征輪廓的提取,獲得較為準確的轉接口尺寸和管腳數量.
長度測量;機器視覺;邊緣檢測
機器視覺是能自動獲取1幅或多幅目標物體圖像[1-2],對所獲取圖像的各種特征量進行處理、分析和測量,并對測量結果做出定性分析和定量解釋,從而得到有關目標物體的某種認識并做出相應決策的系統,具有非接觸、實時性、速度快、精度合適、現場抗干擾能力強等優點. 以生活中手機轉接口為例,基于機器視覺原理實現對手機轉接口尺寸及PIN數量的非接觸式測量. 實驗涉及光源、遠心鏡、CCD相機和圖像邊緣檢測技術,配合搭建的實驗裝置,獲得畸變小、特征對比度明顯的手機轉接口圖像,運用2種差分方法梯度法和羅伯茨(Roberts)算子成功提取尺寸邊緣及PIN特征,得出具體數據. 此裝置易于實現,操作方便,可增加大學物理實驗長度的非接觸式測量方法,提高大學生的學習興趣,提升學生的動手能力,并與現代工業自動化接軌[3].
1 檢測系統工作原理
基于機器視覺的手機轉接口尺寸及PIN數量測量系統主要由光源、遠心鏡、CCD相機和計算機構成[4-5],如圖1所示. 待測轉接口置于定焦遠心鏡頭的工作距離處,同時光源以特定顏色、一定角度照亮轉接口表面,以此突出輪廓對比度;CCD相機獲得遠心鏡所成轉接口的完整像,像盡量鋪滿相機的整個視場. 圖像邊緣檢測技術:利用梯度法和羅伯茨(Roberts)算子提取圖像的邊緣特征,選擇合適的灰度閾值,排除其他信息的干擾,得出特征圖像像素數據. 經過像素標定,利用每個像素與實際長度之間的關系,獲得轉接口的具體尺寸.

圖1 系統工作原理圖
2 參量選取及邊緣檢測
不同的待測物體,其光源、鏡頭及相機參量都不同. 根據物體需測的特征來選取光源,對于具體尺寸或PIN數量的測量可選擇背光式外加環光式. 本文的手機轉接口尺寸寬度大致為7 mm,要求測量精度達到0.05 mm,由此可選擇靶面尺寸、像素合適的相機及極限放大倍率一致的遠心鏡頭. 相機像素精度選型,如下式:
μ=lx/Px,
(1)
其中,lx為水平方向上相機滿視場的實際尺寸,Px為水平方向上的總像素,μ為每個像素代表的實際大小. 遠心鏡頭具有放大或縮小像、景深大和畸變小的特點. 在工業測量中,為了提高測量精度,要求待測物體的像盡量鋪滿相機的滿視場,因此選擇合適的放大倍率鏡頭尤為重要. 一般來說,極限放大倍率為
β=Dx/Lx,
(2)
其中,Lx為實際待測物體尺寸,Dx為CCD靶面尺寸. 在實際測量中,要求選擇鏡頭的放大倍率接近于極限放大倍率.
通常,圖像的特征區域位于灰度突變處,可以用灰度差分提取. 對于手機轉接口,其邊緣和8個PIN管腳的提取可同時運用梯度法和羅伯茨算子法. 計算機讀取的圖像實際上是二維的離散型數集,通過推廣二維連續型求函數偏導的方法,求得圖像的偏導數,選取灰度的銳化,即梯度法[6-7]. 圖像中f(x,y)點的梯度方向為灰度值f(x,y)在這點變化率最大的方向,模G(f(x,y))為灰度值f(x,y)的最大變化率,為
{[(f(x,y)-f(x+1,y)]2+
[f(x,y)-f(x,y+1)]2}1/2.
(3)
從式(3)中可以看出,梯度法求得的是圖像的垂直和水平梯度,但有時也需要對角線方向上的梯度,即Roberts算子:
{[f(x,y)-f(x+1,y+1)]2+
[f(x,y+1)-f(x+1,y)]2}1/2.
(4)
由于該算子檢測的邊緣圖像常需做細化處理,因此可結合梯度法,更加精確定位邊緣特征[8].
3 實驗裝置
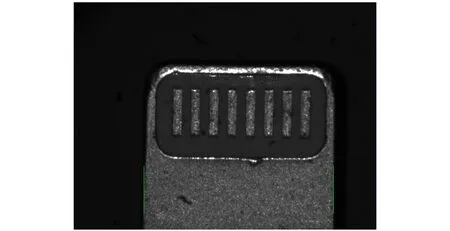
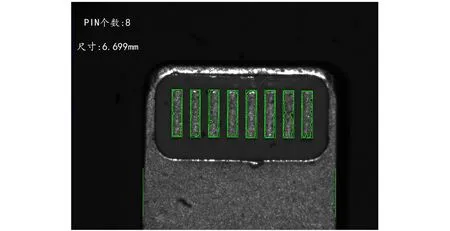
實驗測量裝置如圖2所示,由下至上分別為手機轉接口、環形白光源、遠心鏡頭及工業CCD相機. 裝置置于簡易鐵架臺上,底端與光學平臺固定,鏡頭及相機用鐵夾子鎖定. 其中轉接口實際尺寸為6.650 mm,鏡頭放大倍率為0.5×,工作距為100 mm,CCD規格為1/3英寸,像素1 280×980,并在測量之前以標定板進行實際標定,消除畸變. 經過計算,每個像素代表的實際尺寸為0.008 4 mm,滿足精度及視場要求. 圖3為手機轉接口. 圖4為成像圖,從圖4中可看出,轉接口的像輪廓較為清晰,中間8個PIN管腳對比度明顯,說明光源亮度及位置正確. 轉接口像鋪滿相機的大半個視場,利于后續的精確檢測.
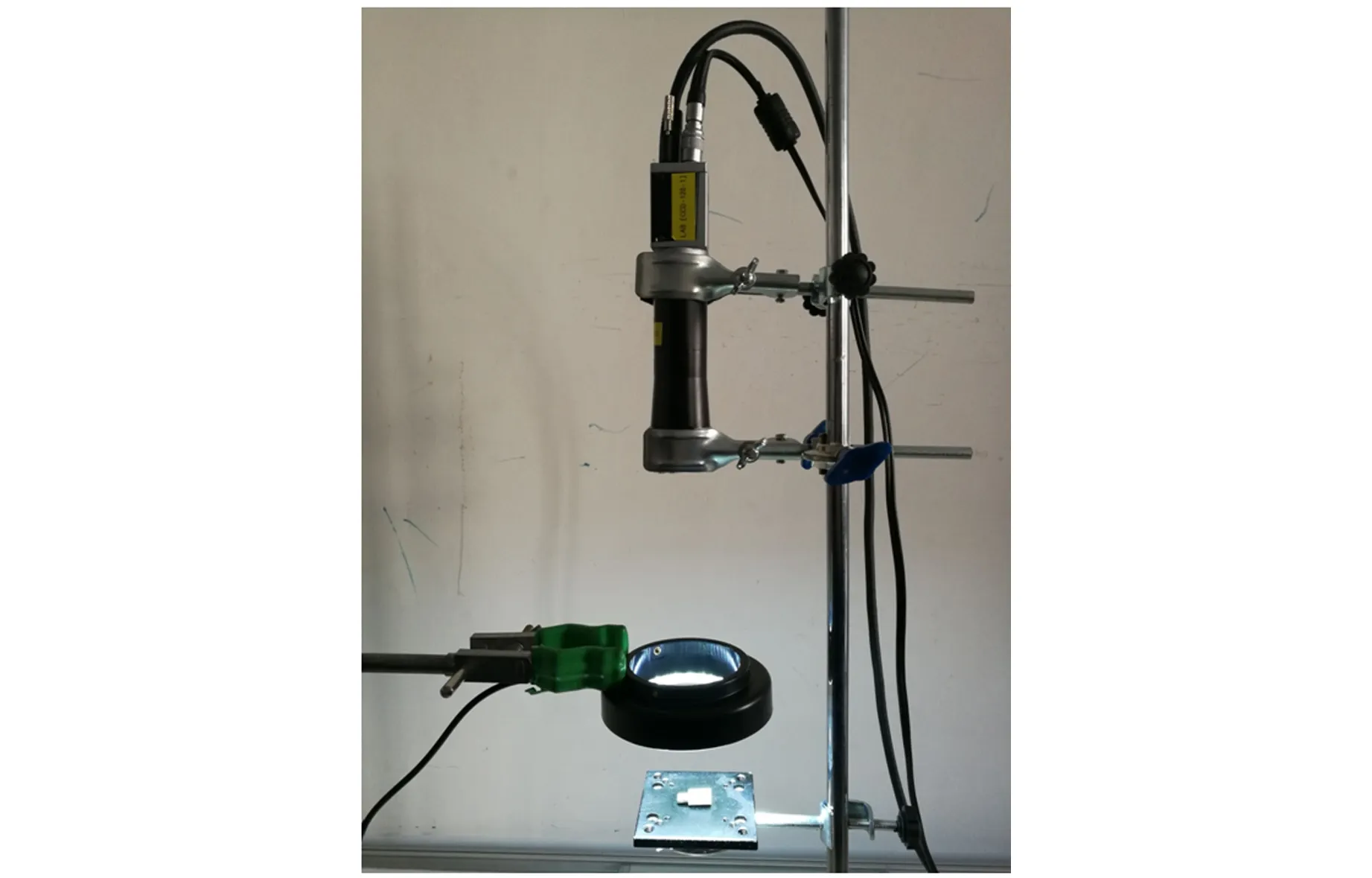
圖2 實驗裝置

圖3 轉接口

圖4 成像圖
為測量轉接口水平方向上的尺寸,需要選定測量區域,如圖5(a)所示. 利用梯度法對整個圖像進行梯度銳化,提取特征邊緣. 首先設定閾值為2,梯度值大于2的像素點為黑色,其余為白色. 從圖5(b)中可看出,梯度銳化后,轉接口圖像的邊緣及上部8個PIN管腳與周圍的背景灰度值對比尤為強烈,效果很好,但同時周圍也出現噪點. 圖5(c)為邊緣區域的灰度圖,從圖中可直接看出2個分界處的像素灰度值突變明顯,兩側部分較為平緩,中心部分突出,經算法提取,之間的像素寬度為798. 因此,根據標定的像素寬度,得出轉接口水平尺寸6.699 mm,相比于原始數據6.650 mm,偏差0.049 mm. 圖5(d)為邊緣選取后的圖像,其中綠色劃線為轉接口邊緣.
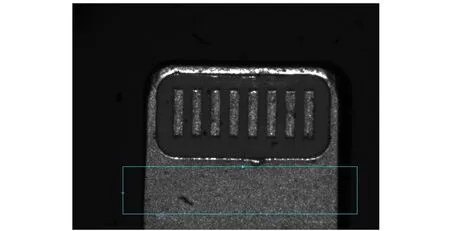
(a)邊緣區域
(b)梯度法銳化

(c)邊緣灰度圖
(d)邊緣提取 圖5 邊緣尺寸處理圖
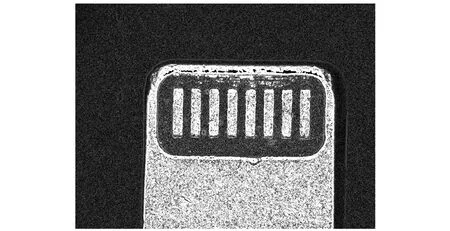
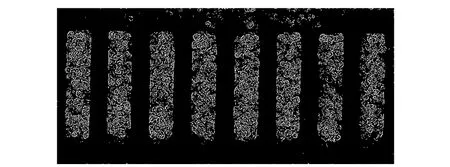
接下來選定另一待測區域,測PIN管腳的數量. 同樣進行梯度銳化,從圖6(b)中可看出銳化后的圖像存在很多雜散灰度干擾,中心處尤為明顯,并且輪廓不清晰,影響判別. 圖6(c)為中心灰度圖,通過擬合才能獲得8個主要峰值,周圍噪聲較多,灰度值分布不均勻,因此需要進一步處理. 如圖6(d)所示,選用Roberts算子對銳化后的圖像重新提取特征,閾值為1,以對角線方向相鄰兩像素之差近似梯度幅值檢測邊緣,過濾噪點. Roberts算子銳化后,PIN管腳的邊緣尤為清晰,對比度明顯. 進一步過濾面積較小的斑點,可獲得PIN管腳的數量為8個,用矩形框顯現出來,如圖6(e)所示.
為減少誤差,提高檢測精度,接下來拍取10幅圖像進行測量,以平均值作為實際測量尺寸,見表1. 從表1可看出,隨著測量次數的增多,平均測量尺寸與實際尺寸越發接近,相對偏差在0.02%左右. 但第5次測量結果6.566 mm和第7次測量結果6.728 mm與實際尺寸6.650 mm偏差較大,最大相對偏差達到1.2%,其原因可能在于兩方面:一是震動引起拍攝角度的變化,導致測量的像素寬度出現誤差;二是相機對焦時,出現曝光延遲,采集圖像的對比度低于或高于其他圖像,計算出的像素寬度有偏差. 而對于PIN腳數量的檢測則極為精確,正確率高達100%,原因可能在于2種梯度算法的完美結合,邊緣提取準確率高,或者是測量的要求不同,前者需測像素寬度,后者測量個數,精度要求不高.

(a)中心區域選取

(c)中心灰度圖
(d)Roberts銳化
(e)結果顯示圖6 圖像處理圖
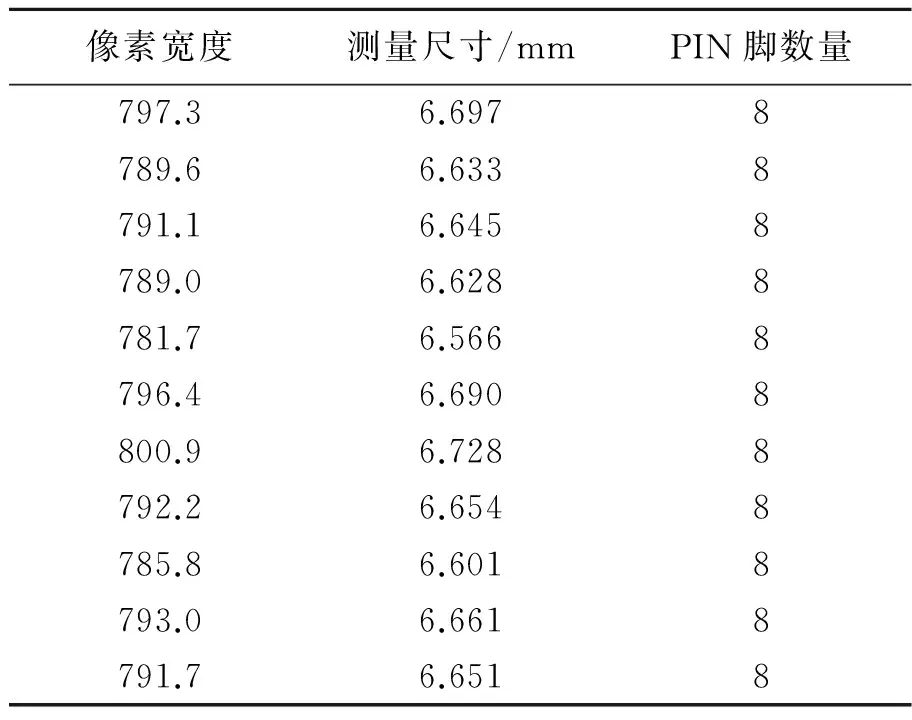
表1 平均測量數據
上述圖像處理基于Matlab實現,較好地完成手機轉接口特征的測量. 在實際操作中,測量值與理論值可能存在較大誤差,原因如下:第一,光學平臺不穩定,震動過大,圖像采集模糊;第二,光源的選擇和入射位置不精確或錯誤,采集圖像的特征對比度不明顯,特征提取的閾值不同,相同的程序不能運用,影響計算機讀數;第三,鏡頭相機的選型不當影響待測物體成像. 還有待測物體擺放位置等. 解決這些問題的關鍵是各部分元件的選型及其之間配合準確,加強外界環境的穩定性,選擇合適的程序進行處理,等等.
4 結束語
基于機器視覺原理實現對手機轉接口尺寸及PIN數量的測量,利用光源、遠心鏡、CCD相機和圖像邊緣檢測技術,配合搭建的實驗裝置,運用2種差分方法梯度法和羅伯茨(Roberts)算子成功提取尺寸邊緣及PIN特征. 實驗過程涉及光學成像知識、圖像處理方法等. 此裝置易于實現,操作方便,能夠多次測量求平均. 相比于傳統的長度測量實驗,此方法涉及的領域較寬,動手能力要求更高,知識更為豐富,并且可與其他實驗相結合,例如牛頓環和邁克耳孫干涉儀實驗,以相機采集環狀條紋圖像,直接讀數和判別,拓寬領域,與現代工業自動化接軌.
[1] Bogue R W. Machine vision theory, algorithms, practicalities [J]. Assembly Automation, 2005,25(3):58.
[2] Lahajnar F, Bernard R, Pernu? F, et al. Machine vision system for inspecting electric plates [J]. Computers in Industry, 2002,47(1):113-122.
[3] 王建中,黃林,唐一文. 基于LabVIEW機器視覺的邁克耳孫干涉儀實驗[J]. 物理實驗, 2014,34(11):40-42.
[4] 雷良育,周曉軍,潘明清. 基于機器視覺的軸承內外徑尺寸檢測系統[J]. 農業機械學報, 2005,36(3):131-134.
[5] 董玉廷. 機器視覺中工件輪廓精確提取方法的研究[D]. 重慶:重慶大學,2013.
[6] 曹建秋,王華清,藍章禮. 一種動態梯度算法圖像二值化邊緣提取[J]. 計算機與信息技術, 2009(9):106-108.
[7] 馬宇飛. 基于梯度算子的圖像邊緣檢測算法研究[D]. 西安:西安電子科技大學,2012.
[8] 王方超,張旻,宮麗美. 改進的Roberts圖像邊緣檢測算法[J]. 探測與控制學報,2016,38(2):88-92.
[責任編輯:任德香]
Measuring the size and the number of pins of mobile phone interface based on machine vision
CHEN Bao-hua1,2, WANG Jun1,2, ZHANG Hao1,2, WU Quan-ying1,2
(1. School of Mathematics and Physics, Suzhou University of Science and Technology, Suzhou 215009, China;2. Tianping College of Suzhou University of Science and Technology, Suzhou 215009, China)
A non-contact measurement method based on machine vision theory was proposed to realize the measurement of the size and the number of pins of mobile phone interface. A simple experimental apparatus was set up, which contained light source, telecentric lens and CCD camera. The image of the mobile phone interface was collected, the contour was extracted using edge detection technology. The accurate interface size and number of pins were obtained.
length measurment; machine vision; edge detection
2017-03-30;修改日期:2017-04-17
蘇州科技大學天平學院教育教學改革研究重點項目(No.2015TJGA-04);江蘇省教育廳教學改革研究立項重點項目(No.2015JSJG058);蘇州科技學院校級重點專業應用物理學專業建設項目(No.2013ZYXZ-08);研究生科研創新計劃項目(No.KYLX15_1313)
陳寶華(1990-),男,江蘇泰州人,蘇州科技大學數理學院實驗師,碩士,從事光學設計與圖像信息處理方面的研究.
王 軍(1981-),男,山東濟寧人,蘇州科技大學數理學院副教授,博士,主要從事物理實驗教學和光學測量方面的研究.
TP242.62;TB921
A
1005-4642(2017)08-0006-04
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12
