用于水產養殖的水下機器人設計與制作
2017-08-30 00:17:22廣東海洋大學電子與信息工程學院黎柱坤林冰勝張宇航吳華宇黃光煒陳春雷
電子世界 2017年15期
關鍵詞:水質
廣東海洋大學電子與信息工程學院 黎柱坤 王 慧 林冰勝 張宇航 吳華宇 黃光煒 陳春雷 王 驥
用于水產養殖的水下機器人設計與制作
廣東海洋大學電子與信息工程學院 黎柱坤 王 慧 林冰勝 張宇航 吳華宇 黃光煒 陳春雷 王 驥
為了滿足用戶對于養殖池的水質監測和水下生物生活常態觀察的需要,本作品使用了角度加速度陀螺儀、多種水質傳感器、485通信技術和視頻傳輸等技術,實現了水中穩態控制、多種水質參數的實時測量和水下實時拍攝。隨著海洋研究與開發的不斷深入,水下機器人成為人們完成各種水下任務的重要輔助工具,其中遙控式水下機器人(ROV)在海洋開發的很多領域都得到了廣泛應用。ROV工作在復雜的海洋環境中,具有運動速度慢,運動慣性較大,非線性和耦合性較強的特點,這些特點都成為其在水下運動控制的難點。運動控制技術是水下機器人研究的基礎,一個穩定可靠的控制系統也是水下機器人完成預期任務和水下作業的前提與保證,因此對ROV的控制成為當前ROV技術的研究熱點之一。
水下機器人;水質監測;stm32;穩態控制;水下拍攝視頻
1 研究意義及國內外現狀
目前,大力發展水下機器人產業對于開發海洋經濟,探索海洋世界具有戰略意義。探索海洋世界,進軍大洋深處,離不開水下機器人技術的發展,ROV水下機器人可以潛入海中,獲取水下視頻資料,采集水下樣本,對于開發海洋資源提供有力的技術數據支持。中國是一個海洋大國,擁有約1.8萬公里的海岸線和6500多個500平方米以上的大小島嶼。我國還擁有面積約300萬平方公里的管轄海域,如此廣袤的海洋國土有豐富的海洋漁業生物資源,水下機器人在海洋環境監測、海洋資源開發、防災減災以及保障海洋環境安全方面具有重要的意義。隨著國內海水養殖業的發展,養殖企業迫切需要應用在水產養殖生產和科學研究的水下機器人,需要高智能水下機器人對水下養殖水質的狀況進行實時檢測和對水下生物生活狀況進行水下實時視頻監測。由于在水中機器人會受到水波、暗流等多種因素影響,因此若要獲得準確的數據和穩定清晰的圖像就離不開一個穩定的姿態控制。
2 總體設計方案
2.1 產品總系統設計
2.1.1 概論
本作品采用32位以ARM架構的stm32rct6系列芯片作為系統的主控芯片,結合mos管電機驅動電路和四路電機,輕易達到靈活地控制水下機器人的活動。采用氨氮傳感器、溫度傳感器、PH傳感器、含氧傳感器、含鹽量傳感器進行水質測試,把收集的水下水質數據通過485通信協議傳輸給stm32主控芯片,主芯片進行數據處理,統計。在通過路由的方式把數據傳輸到電腦端的上位機上。此外,本水下機器人通過水下防水攝像頭進行水下拍攝,再用過有線方式實時地把信號傳輸到上位機上,方面用戶查看水下情況,對水下生物研究有著很大的作用。外殼使用SolidWorks來設計外形,更能達到外形設計的合理性,材料成本低廉。
2.1.2 軟件系統框圖

圖2-1 系統框圖
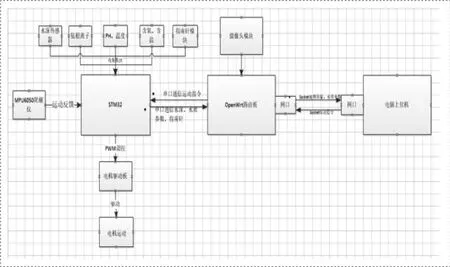
圖2-2 三大模塊通信系統框圖
2.2 電路設計方案
我們選用stm32作為主控,內核:ARM32位Cortex-M3 CPU,最高工作頻率72MHZ,1.25DMIPS/MHZ存儲器:片上集成512KB的Flash存儲器。64KB的SRAM存儲器。擁有3個USART接口,多達3個同步的16位定時器,每個定時器有多大4個用于輸入捕獲/輸出比較/PWM或脈沖計數的通道[1]。
2.2.1 主控板最小系統
主控板最小系統為stm32最小系統,,使用8MHz外部晶振作為MCU的RC振蕩器,每個電源接口還接一個容量為0.1uf的濾波電容,防止電源波動影響MCU工作,及上電復位電路,SW模式調試及程序燒錄接口。
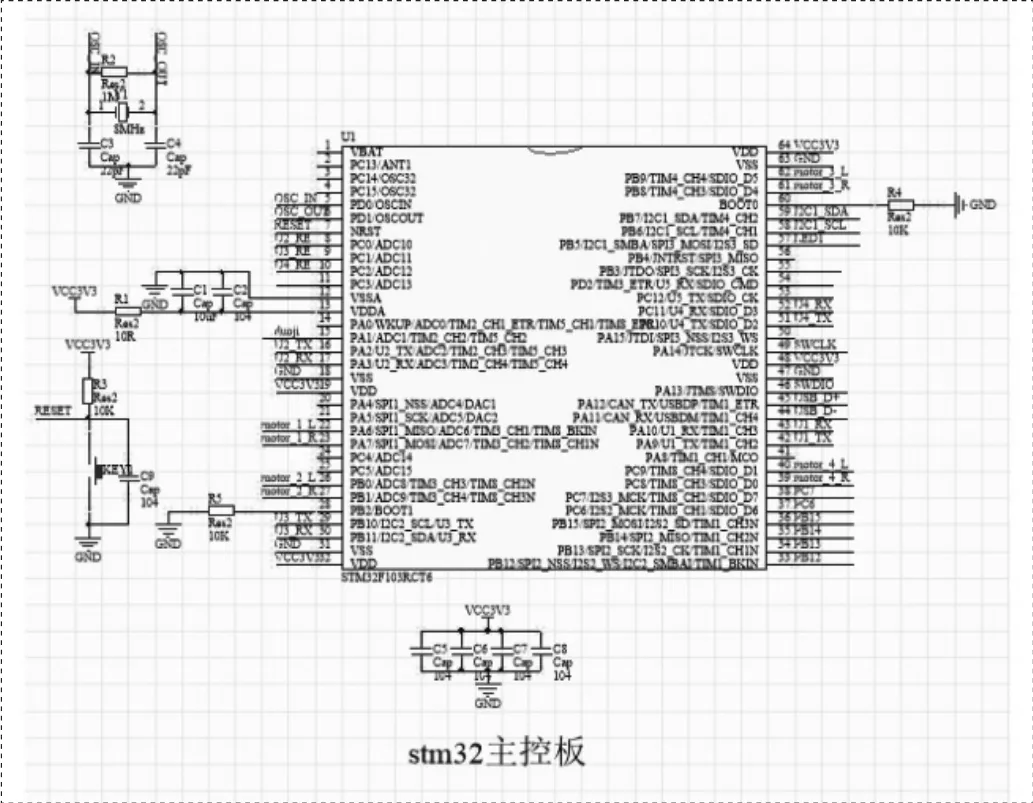
圖2-3 stm32最小系統圖
2.2.2 路由版
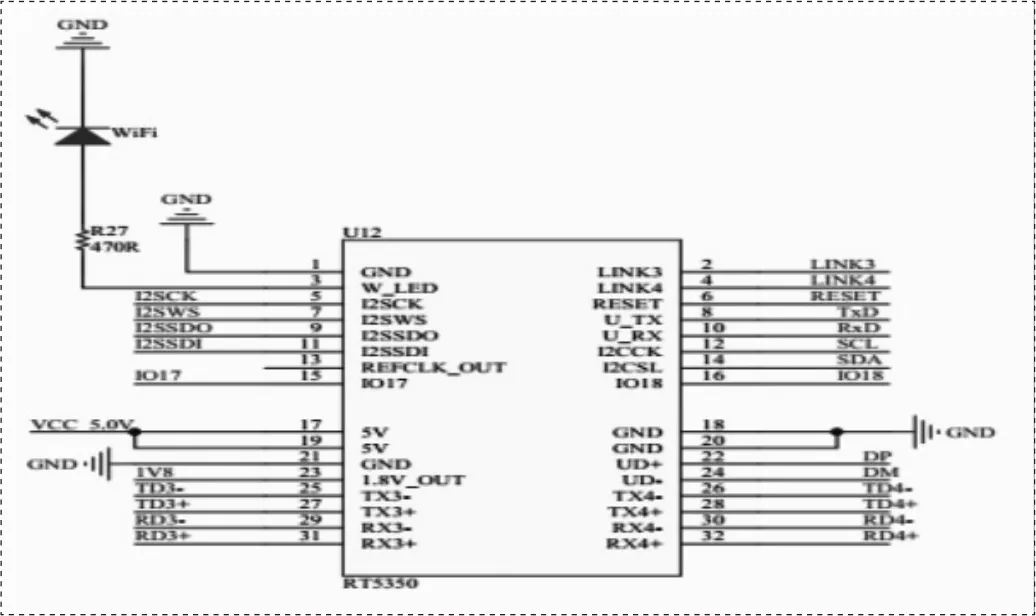
圖2-4 路由版的電路圖
2.2.3 MPU6050
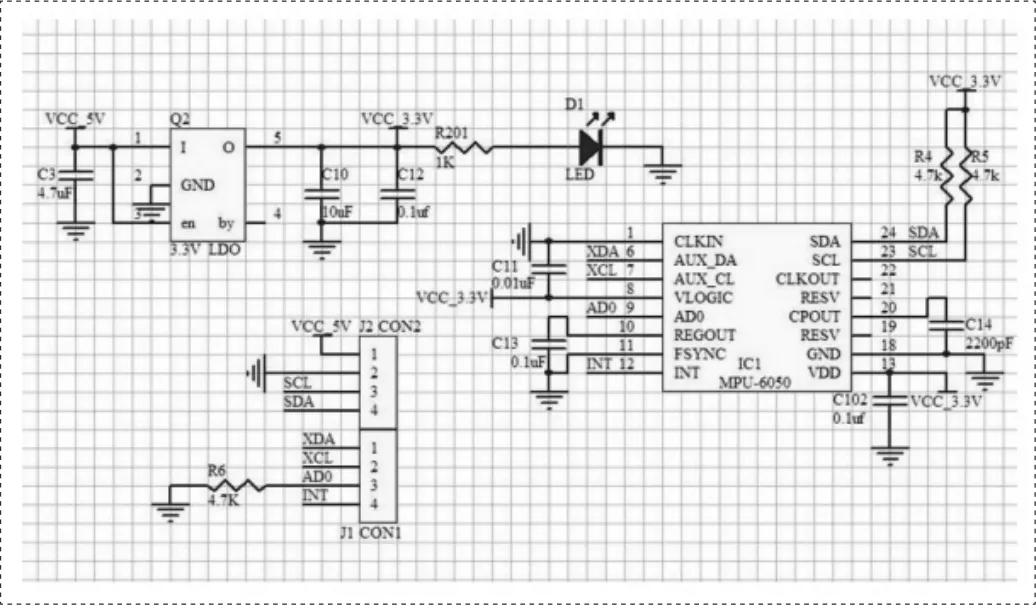
圖2-5 MPU6050電路圖
2.2.4 電源研究設計
電源方面我們采用AMS1117-3.3V和AMS1117-5V,這種穩壓模塊設計周期短、可靠性高、大大降低控制板的體積;采用這種芯片還有好處就是電壓穩定,能準確提供電壓。而12V電源的接線處和開關,我們采用耐高壓耐大電流的,以防因為電壓電流過大把開關燒壞。

圖2-6 5V穩壓電路圖
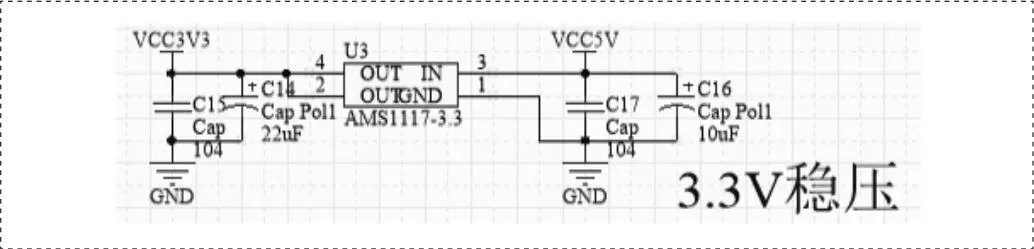
圖2-7 3V穩壓電路圖
2.3 硬件設計方案
(1)微型處理器,均使用意法電子stm32c8t6,ARMCortex-M3內核的微型處理器。
(2)DC-DC及LD0的組合應用,巧妙利用航空防水接頭做水下開關,實現合理的電源管理,向系統提供穩定的多組電壓。
(3)攝像頭采用東芝720P的高清攝像頭支持openwrt系統UVC攝像頭,支持USB直接接口,方便使用,水下拍攝清晰。
(4)路由板以rt5350作為主控芯片,支持視頻遠距離傳輸。
(5)推進器12V,中推力的電機,消耗不大,運動靈活,便于操控。
2.4 外型設計方案
2.4.1 概論
我們采用的是PLA(生物降解塑料聚乳酸)環保材料作為水下機器人的外殼框架設計,外殼的設計是使用SOILDWORKS 2016軟件進行3維視圖建模[2],并使用3d打印技術打印成型,由密封艙與外圍固定框架組成。作品總長:335mm,寬:334mm,高:247mm。由于我們采用的是有纜水中自航式潛水器(地面站工作人員通過電腦或手機相對應控制潛水器的上位機來控制潛水器在水中的姿態、行進方向和高度等等,然后潛水器在水中收集到的數據通過網線傳輸給電腦上位機)。所以作品可分為三大部分,分別是密封倉、電機殼、外圍框架。我們的潛水器外觀精美,密封倉為透明亞克力圓柱半球體,外圍部分框架選擇了鮮艷的橙黃色,以方便觀察潛水器在水下的狀態和位置。
2.4.2 密封艙的設計
密封倉設計成具有一定的流線型,可以減小潛水器在水下運動時的阻力,降低功耗提高效率增強靈活性等等。密封倉前面設計有一個透明圓形罩,不但進一步降低水中的阻力,還可以在此放置攝像頭,攝像頭我們采用的是720P高清廣角攝像頭,獲得更廣闊的視角和實時的畫面以觀察水下的情況獲得更準確的數據,并且數據傳輸支持OPENWRT,MJPG等USB接口,更快也更方便讀取攝像頭數據。密封倉后蓋打孔,用于開關接口,通信線,燒錄程序線等的連接,接口處和前后蓋和倉體,都采用密封圈密封,達到了很好的防水效果。

圖2-3-1 密封艙整體設計

圖2-3-2 密封艙后蓋設計
2.4.3 電機朝向設計和電機的選擇
電機殼主要是如何將電機推進器更好的和密封倉固定在一起并起到上下左右的基本運動和懸停、定高等高級動作。根據仿真和實測,本款水下機器人考慮到搭載了三個大的長條圓柱狀傳感器,故將其與密封艙保持平行的放置在密封艙下面,一方面擁有了良好的外形效果;一方面由于將大部分重量轉移到水下機器人下面,使重心下降,增大了在水下的操控性能;另一方面也可使電機的擺放位置更加合理。整機采用了四個防水電機,兩個向后主要負責前進后退的動力,同時也可利用差速實現轉彎,另兩個電機朝向向上,用于水下機器人在水中的浮潛和定深,同時也可利用機器人內部搭載的角度傳感器和陀螺儀來控制兩電機的轉速比。如果密封倉內部的陀螺儀檢測到潛水器有傾斜,將通過向上或向下推進以實現潛水器總體的平衡。

圖2-4-1 推進器(實物圖)

圖2-4-2 3D模型 安裝示意圖

圖2-4-3 推進器 (總體效果圖)
3 水下機器人總體功能、性能及結構尺寸
3.1 總體功能
3.1.1 水下拍攝功能
水下機器人采用東芝720P攝像頭,配合高清亞克力板,使用適合的軟件算法,調節機器人的運動,使高清攝像頭180度全方位拍攝,能很好地對水下環境進行觀察。
3.1.2 人機交互功能
水下機器人采用全電腦上位機收發數據,接收視頻控制,通過一個電腦端中的上位機,可以清晰接收視頻。通過上位機,可以對機器人進行上下左右的控制,上浮下潛控制,然后可以接收機器人發出的傳感器數據。
3.1.3 水質傳感器功能
水下機器人機載PH傳感器,溫度傳感器,氨氮傳感器,含氧量傳感器,含鹽傳感器,機器人通過用stm32處理后,把數據通過網線方式直接傳回電腦終端。
3.1.4 上位機接受水質參數和實時視頻功能
水下機器人的上位機可以操控機器人運動,也可以接收視頻數據,也可以接收下位機機器人發送的傳感器數據。讓用戶直觀地看到水質參數,溫度等等。
3.2 性能
3.2.1 電機
本機器人擁有四個推進器,兩個推進器負責上浮下沉,另外兩個推進器控制前后左右的運動。然后通過PID平衡控制算法,對水下機器人運動進行控制。這樣機器人在水里的運動更加靈活,可控性更強。
3.2.2 螺旋槳
本機器人采用的是5葉的螺旋槳,優勢在于電機同樣的轉速一下,電能消耗同樣的情況下,排水量更大,水下機器人具有更大的推進力,能達到節省功耗的目的。
3.3 結構尺寸
下面為機器人外觀結構的尺寸三視圖:(單位為:mm)

圖3-1 水下機器人正視圖

圖3-2 水下機器人俯視圖
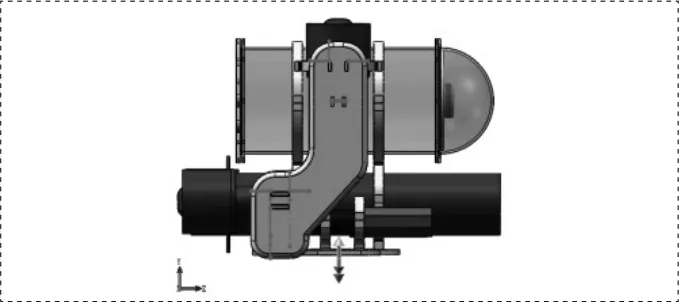
圖3-3 水下機器人側視圖
4 水下機器人的水下控制
4.1 水下控制簡介
隨著控制技術的發展,各種先進的控制方法相繼應用在深海潛水器的控制系統中,從國內外的參考文獻中可以看到很多種,他們主要用下面的控制方法來實現深海潛水器的運動控制:PID控制、滑模控制方法、模糊控制方法、自適應控制方法、魯棒控制方法。水下航行器是一個強非線性參數不確定系統,且運行在未知的復雜的海洋環境下,一旦發生事故就可能造成巨大的財產損失。設計水下航行器控制系統所面臨的主要困難有:系統模型具有高度非線性、時變、多變量、強耦合等特點,流體動力學參數不確定,波浪和海流的隨機擾動等等。PID控制由于其結構簡單,參數調節容易,并且其性能在許多場合中也可以被接受,因此PID控制仍然是水下航行器研發和操作人員廣泛采用的方法。然而考慮到水下航行器動力學非線性的特征,為了獲得滿意的控制性能,需要對線性特征的PID控制進行改進,以提升水下航行器PID控制的性能[3]。線性PID控制器是基于反饋的一種控制方式,簡單的表達方法是接受偏消除偏差,其控制的主要過程包括數據獲取、數據對比和系統執行。數據的獲取對應的是變量的輸入,經過與期望值的對比來得到原始的偏差,運用偏差來消除偏差使系統達到穩定的狀態。
4.2 水下平衡的PID控制算法
工程實際中,應用最為廣泛調節器控制規律為比例、積分、微分控制,簡稱PID控制,又稱PID調節。PID控制器問世至今已有近70年歷史,它以其結構簡單、穩定性好、工作可靠、調整方便而成為工業控制主要技術之一。當被控對象結構和參數不能完全掌握,或不到精確數學模型時,控制理論其它技術難以采用時,系統控制器結構和參數必須依靠經驗和現場調試來確定,這時應用PID控制技術最為方便。
4.2.1 PID三個獨立控制環節的控制原理
比例(P)控制:比例控制是一種最簡單的控制方式,其控制器的輸出與輸入誤差信號成比例關系。當僅有比例控制時系統的輸出存在誤差。
積分(I)控制:在積分控制中,控制器的輸出與輸入誤差信號的積分成正比,在控制器中引入積分環節可以消除穩態誤差。
微分(D)控制:在微分控制中,控制器的輸出與輸入誤差信號的微分(即誤差的變化率)成正比關系。自動控制系統在補償誤差的調節過程中可能會出現振蕩甚至失穩。其原因是由于存在較大慣性環節(如水波影響)或滯后單元(如通訊設備的延遲),它們具有抑制誤差的作用,即其變化總是落后于誤差的變化,而解決的辦法是提前抑制誤差的變化。[4]
4.2.2 PID控制算法在水下機器人水下控制的應用
綜上所訴,比例環節的作用是調節幅值;積分環節的作用是調節穩態誤差;微分環節的作用是調節超調量。在水下機器人在水中行進過程中,由于系統會受到水波、延遲、圖像采集誤差等眾多復雜的影響,微分環節必不可少。而它自身位置和水球的位置均在動態變化著,因此既定目標點也應是動態變化的。由于在水中受水的阻力影響,相當于起到一個控制濾波的作用,因此也就不會存在穩態誤差的概念,不必引入積分環節,而比例環節是控制系統中必須的,對于水下機器人在水下的運動,我們采用PD(比例---積分)控制算法來控制整體在水中航行時的穩定性。
為了讓這一控制算法在水下機器人上起作用,我們采用了四個防水電機,兩個向后主要負責前進后退的動力,同時也可利用差速實現轉彎;另外兩個電機朝向向上,不但用于水下機器人在水中的浮潛和定深,而且還利用機器人內部搭載的角度加速度傳感器和陀螺儀來控制兩電機的轉速比,再結合PID平衡控制算法,即可保證機器人在水下不傾斜不翻倒實時保持平衡,為后續其采集數據和水下攝像等工作保證穩定狀態。
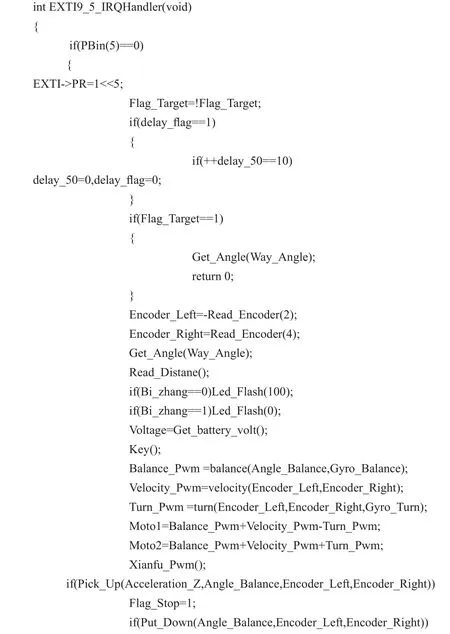
4.2.3 部分PID控制算法代碼設計
5 結論
隨著人類在海洋探測和開發過程中對水下水質參數檢測將會日益普及,尤其是水下設備上需要低消耗、續航能力強、通信能力強的設備實現實時視頻探測和水質參數傳遞。這樣的話,有線的機器人具有一定的優勢。但是受水中水壓、速度、水波、暗流等環境變化因素影響,自主式水下潛器在水下的運動具有較大的不確定性,但是我們研發的水下機器人采用PID控制算法結合加速度角度陀螺儀傳感器模塊,可在水下自由平穩移動,速度達到0.63m/s,具有視覺和感知系統,通過遙控或自主操作方式,來完成水下水質(PH值、溫度、含鹽量、含氧量、氨氮值等)的監測和水下生物狀態的拍攝,并將數據和畫面直接上傳的裝置。
[1]劉張,劉軍,嚴漢宇,左忠凱.原子教你玩stm32[M].北京航空航天大學出版社.
[2]劉雪松,渠達.SolidWorks 2013完全自學教程(中文版)[M].中國鐵道出版社,2013,07.
[3]鄭文龍,劉洋,肖昌潤,杜佩佩.水下航行器的PID運動控制方法研究[M].中國水運出版社,2015,10.
[4]趙建,白春江,章文俊.水下潛器姿態角的分數階PID控制研究[M].艦船科學技術出版社,2016,11.
黎柱坤(1994—),男,大學本科,研究方向:電子信息工程。
王慧(1963—),女,副教授,研究方向:智能控制系統,光纖傳感器技術。
項目支持:廣東海洋大學創新強校工程科研項目(GDOU2014050240);廣東海洋大學“海之帆一起航”計劃項目(hzfghjhkjfm2015b13)。
猜你喜歡
環境(2023年5期)2023-06-30 01:20:01
小星星·閱讀100分(低年級)(2022年6期)2022-08-22 02:33:40
供水技術(2021年3期)2021-08-13 09:08:34
建材發展導向(2019年10期)2019-08-24 06:25:02
當代水產(2019年1期)2019-05-16 02:42:04
當代水產(2019年3期)2019-05-14 05:42:48
電子制作(2018年14期)2018-08-21 01:38:16
水利規劃與設計(2018年1期)2018-01-31 01:53:53
水利規劃與設計(2016年7期)2016-02-28 15:06:27
世界文學評論(2014年2期)2014-04-12 06:23:43