基于超扭曲算法的永磁同步電機直接轉矩控制
2017-08-31 19:02:23宋爭光夏長亮王志強史婷娜
電工技術學報 2017年15期
宋爭光 夏長亮 王志強 史婷娜
(1.天津大學電氣與自動化工程學院 天津 300072 2.天津市電工電能新技術重點實驗室(天津工業大學) 天津 300387)
基于超扭曲算法的永磁同步電機直接轉矩控制
宋爭光1夏長亮1王志強2史婷娜1
(1.天津大學電氣與自動化工程學院 天津 300072 2.天津市電工電能新技術重點實驗室(天津工業大學) 天津 300387)
針對以電壓源逆變器(VSI)饋電的永磁同步電機(PMSM)驅動系統,提出一種基于超扭曲算法的直接轉矩控制。該控制策略結合滑模控制、直接轉矩控制和空間矢量調制的原理,克服了PI型控制的空間矢量調制-直接轉矩控制(DTC-SVM)魯棒性差與傳統滑模控制的DTC-SVM存在抖振的缺點,從而獲得良好的穩態與動態性能,同時保證逆變器開關頻率近似恒定。實驗結果表明,所提方法不僅可以有效減小磁鏈和轉矩脈動,還對系統參數變化具有較強的魯棒性能。
永磁同步電機 空間矢量調制 直接轉矩控制 超扭曲算法
0 引言
直接轉矩控制(Direct Torque Control,DTC)因其結構簡單、動態響應快、魯棒性強等優點,被廣泛應用于高性能交流驅動系統[1],尤其是電壓型逆變器(Voltage Source Inverter,VSI)饋電的永磁同步電機(Permanent Magnet Synchronous Motor,PMSM)驅動系統[2]。在傳統DTC中,兩個滯環比較器僅能產生4種數字控制量的組合,且當定子磁鏈位于任意扇區時,每種組合僅在開關表中唯一地對應一個有效矢量,并且每個有效矢量的長度相等,且方向固定,因此傳統DTC對輸出矢量的控制能力會受到嚴重限制,這會使其在穩態運行時出現不理想的轉矩與磁鏈波動[3]。同時,滯環比較器在固定的采樣周期內無法控制開關導通時間,即無法控制開關電壓矢量作用時間,導致逆變器開關頻率不恒定[4]。
近年來多種DTC的改進方案相繼被提出。利用電壓空間矢量調制(Space Vector Modulation,SVM)技術可獲得更多連續變化的電壓空間矢量,實現對磁鏈、 轉矩更準確地控制,同時保證逆變器開關頻率近似恒定[5]。文獻[6]利用PI控制器將轉矩控制誤差轉換為轉矩角的增量,結合定子磁鏈矢量偏差重構定子參考電壓矢量,建立了轉矩閉環直接轉矩控制。文獻[7]分別以轉矩和磁鏈誤差作為輸入,由兩個PI控制器輸出定子參考電壓,并采用空間矢量調制控制逆變器的開關狀態。雖然采用PI型調節器替代滯環型調節器來控制定子磁鏈和轉矩可以獲得良好的穩態性能,但特定的PI系數對電機參數、轉速和負載變化敏感,不能保證控制魯棒性[8]。
滑模變結構控制對非線性不確定性系統來說是一種有效的控制方法,其對系統的參數攝動和外部干擾魯棒性非常強,且結構簡單,響應快速[9,10]。文獻[11,12]在永磁同步電機兩相靜止坐標系中,將定子磁鏈和轉矩兩個滯環控制器用滑模變結構控制器來代替,再結合空間矢量調制方法,以減小磁鏈和轉矩脈動。但滑模控制的抖振現象是限制該方法取得更好控制效果的一大障礙。為減弱或消除抖振的影響,Aire Levant 首先提出高階滑模控制思想[13],并系統地提出了幾種二階滑模(Second Order Sliding Mode,SOSM)控制算法,常見的二階滑模控制算法有twisting算法、prescribed convergence law算法、sub-optimal算法和super twisting算法,其中super twisting(超扭曲)算法已被用于無人機編隊飛行控制系統[14]。高階滑模保留了傳統滑模的優點,并且能有效抑制抖振。與傳統滑模作用到滑模變量的一階導數上不同,高階滑模的主要思想是將產生抖振的開關函數作用到所選取滑模變量的高階導數上,并通過控制率的設計使得滑模變結構在有限時間內快速收斂[15,16]。高階滑模算法的實現通常需要滑模變量的導數,而基于超扭曲算法的滑模作為一種高階滑模算法,本質是二階滑模算法,它的實現并不需要滑模變量的導數,從而簡化了控制器結構[17,18]。
本文在定子磁鏈定向坐標系下設計了基于超扭曲算法的直接轉矩控制。該方法克服了PI型控制的DTC-SVM魯棒性差與傳統滑模控制的DTC-SVM存在抖振的缺點,可以有效減小磁鏈和轉矩脈動,同時保證逆變器開關頻率近似恒定。
1 永磁同步電機數學模型
表貼式永磁同步電機在定子磁鏈坐標系x-y下的數學模型[3]為
(1)
其中
(2)
式中,ux、uy分別為電機定子電壓在x、y坐標下的分量;ix、iy分別為電機定子電流在x、y坐標下的分量;Te為電磁轉矩;Ls為電機定子電感;Ψs為定子磁鏈矢量;Ψf為轉子永磁體磁鏈幅值;p為電機極對數;δ為定子磁鏈與轉子磁鏈的夾角,δ∈(-π/2,π/2);ωr為轉子永磁體磁鏈旋轉角速度。
由式(1)分析可知,在定子磁鏈定向坐標系下,ux與磁鏈幅值的變化率呈正相關,uy與轉矩的變化率呈正相關。
2 基于超扭曲算法的直接轉矩控制
2.1 基于超扭曲算法的控制器設計
超扭曲算法的一般形式為
(3)
式中,x1、x2為狀態變量;λ、α為正的常數;ρ1、ρ2為擾動。相比于傳統一階滑模狀態變量x1收斂偏差正比于τ(τ為采樣時間[19])。超扭曲算法在離散域狀態變量x1收斂偏差正比于τ2,具有更準確的跟蹤性能。
采用超扭曲算法設計轉矩和磁鏈控制器時,滑模切換函數取為
(4)

設計的轉矩和磁鏈控制器為
(5)
式中,k1、k2、k3、k4為控制器增益,均為正的常數。
由于式(5)表示的控制量是連續函數,故可有效抑制抖振。
將切換函數對時間求導,可得
(6)
令k11=kk3,k22=kk4,為證明上述系統穩定性,選取李雅普諾夫函數為
(7)
其中
由于
對式(7)求導,可得
(8)
其中

(9)
其中
若選取控制器參數
(10)

由式(10)選取合適的參數后,要想獲取k3、k4,還需要求得k值。由于[2]
(11)
將式(11)對δ求導,并聯立式(2),可得
(12)
內蒙古額仁高比一帶發育大量的早白堊世白音高老組的火山巖,分析地區白音高老組火山巖巖石地球化學特征,對揭示該時期巖漿作用具有重要地質意義。通過1∶5萬區域地質調查工作,探討其成因以及形成的大地構造環境。
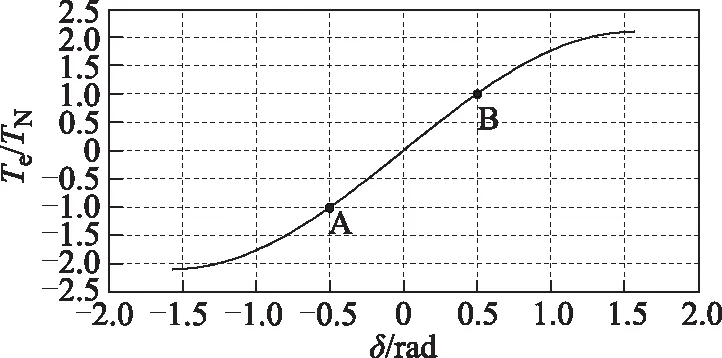
圖1 Te與δ關系曲線Fig.1 Relationship curve of Te and δ
2.2 魯棒性分析
系統實際運行時會受到內部參數攝動、外部干擾、測量誤差以及測量噪聲等影響,考慮干擾的系統方程可表示為
(13)
式中,d1、d2為各種擾動之和。
將式(5)代入式(13),可得

2.3 定子磁鏈與轉矩估計
永磁同步電機系統在定子磁鏈估計時,由于電壓模型相比于電流模型需要較少的電機參數,且結構簡單,通常采用電壓模型。
(14)
(15)
(16)


整個定子磁鏈估計的原理框圖如圖2所示。
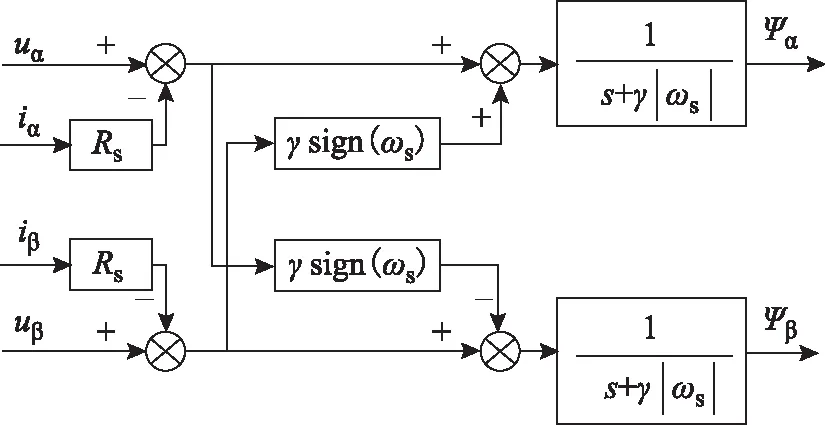
圖2 定子磁鏈估計框圖Fig.2 Diagram of the stator flux estimator
2.4 基于超扭曲算法的直接轉矩控制系統
本文所提出的基于超扭曲算法的直接轉矩控制框圖如圖3a所示,圖3b給出了超扭曲控制器框圖,該控制策略結合滑模控制、直接轉矩控制和空間矢量調制的原理,可以實現對轉矩和磁鏈的簡單有效控制。
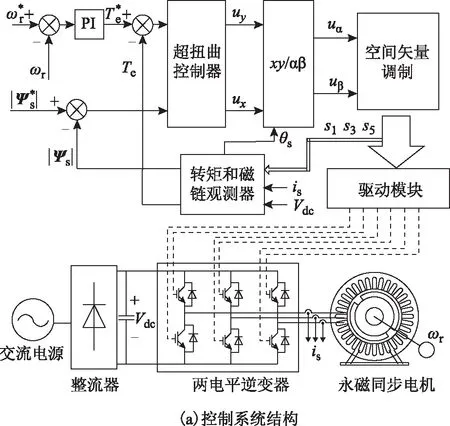
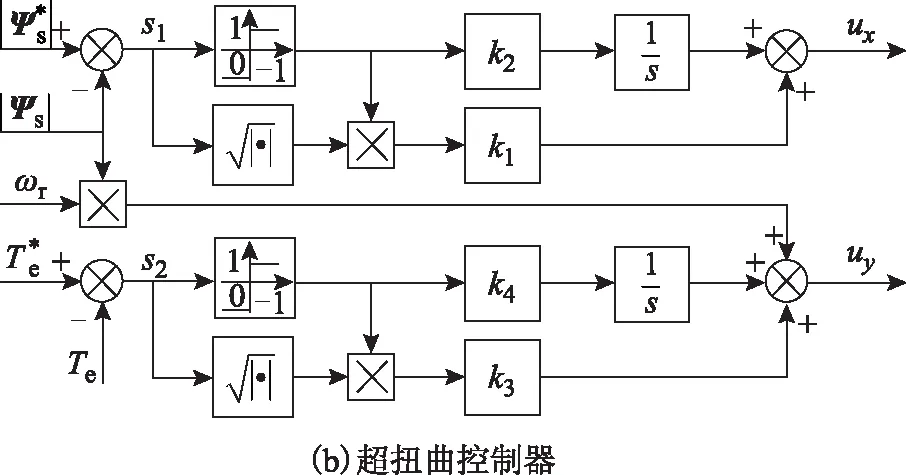
圖3 基于超扭曲算法的直接轉矩控制系統及控制器框圖Fig.3 Diagram of direct torque control using super twisting algorithm and controller
3 仿真和實驗分析
3.1 仿真結果分析
為了驗證本文提出方法的有效性,利用Matlab/Simulink 建立仿真模型,仿真中的電機參數見表1。為了更好地與實驗條件相一致,速度控制器輸出設有限幅環節,限幅為[-500,500]。
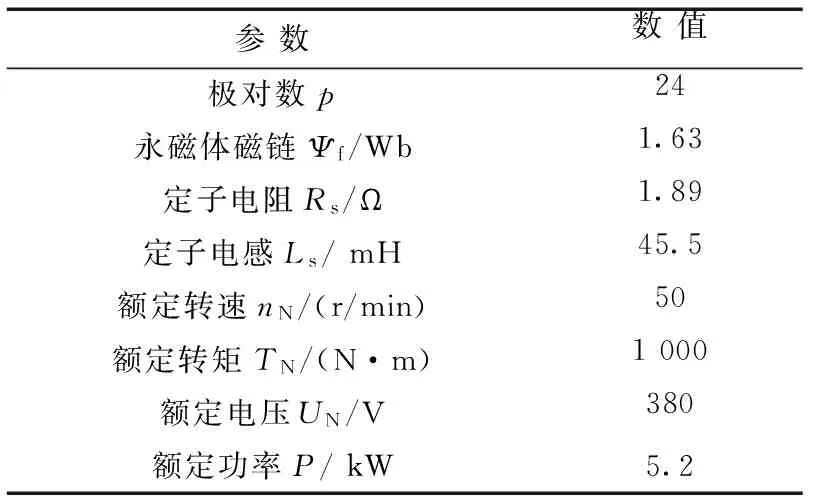
表1 永磁同步電機額定參數Tab.1 Rated parameters of PMSM
首先在沒有轉速控制器的條件下對本文算法的轉矩和磁鏈跟蹤性能進行仿真驗證,圖4給出了其跟蹤波形。可以看出,本文算法的轉矩與磁鏈可以快速準確地跟蹤其參考信號,同時不存在超調現象,因此本文算法具有良好的轉矩與磁鏈跟蹤性能。

圖4 本文所提方法的轉矩和磁鏈跟蹤波形Fig.4 Tracking waveforms of torque and flux for the proposed approach
下面將本文控制算法與PI控制器[7]和指數趨近律的滑模控制器[12]進行比較,三種控制方法的速度控制器均為PI控制器。圖5給出了三種方法在電機轉速為25 r/min,負載轉矩為300 N·m時的穩態波形。可以看出,本文方法在穩態運行時具有良好的轉矩、磁鏈和電流波形,與PI控制大體相當,而指數趨近律控制下的轉矩、磁鏈和電流因其控制器中含有不連續開關量,故具有較大的波動。
圖6給出了電機轉速為25 r/min,負載從200 N·m階躍到400 N·m時,三種方法的動態波形。可以看出,三種方法在負載發生突變時,都能迅速跟蹤轉速和轉矩指令值。PI控制下定子磁鏈幅值易受到負載突變的影響,這是由其帶寬較小造成的,若增大其帶寬,雖然可以減小定子磁鏈幅值受負載突變的影響,但其對外界噪聲干擾抑制減弱,從而使得定子磁鏈幅值波動變大。而指數趨近律控制與本文所提方法控制下磁鏈控制器的帶寬較大,并且指數趨近律控制與本文所提方法控制均屬于滑模控制,滑模控制結構對外界噪聲干擾不敏感,故其定子磁鏈幅值不受轉矩變化的影響,具有較好的控制魯棒性。
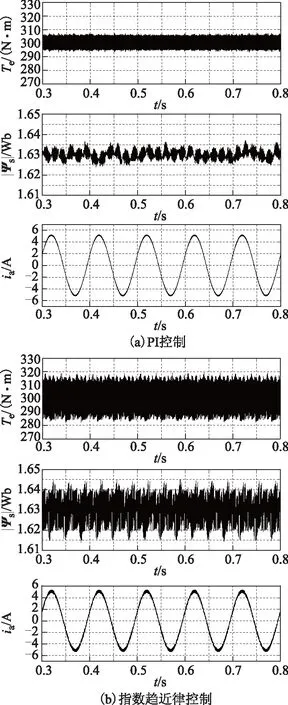

圖5 三種控制方法的穩態波形Fig.5 Steady state waveform of three control methods
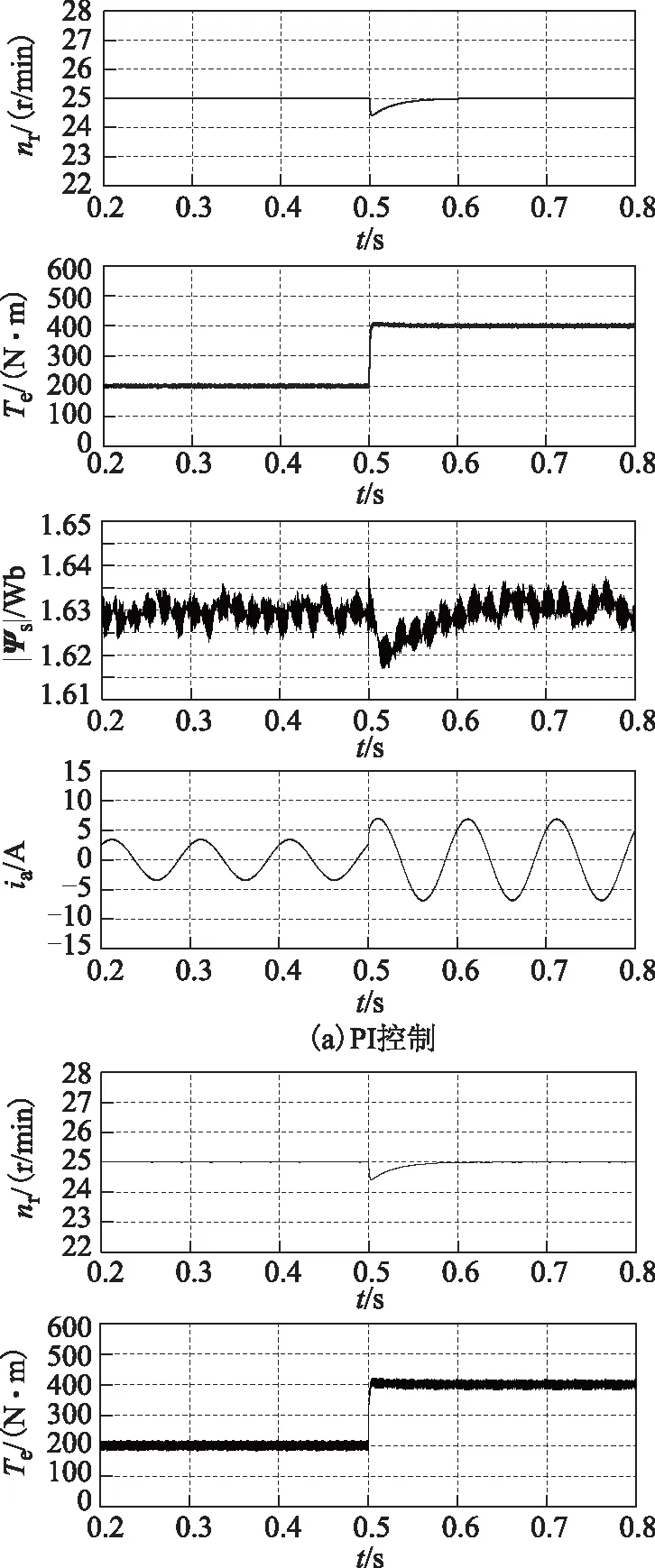
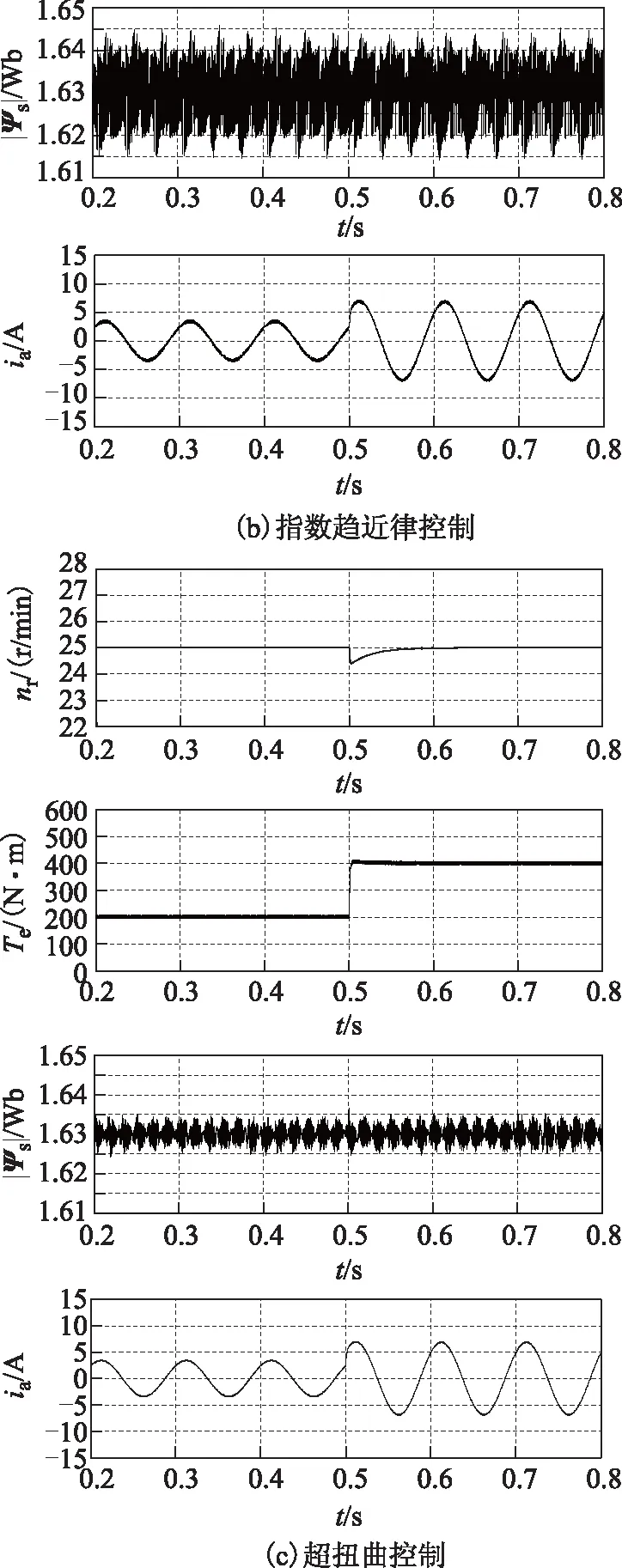
圖6 三種控制方法的動態波形Fig.6 Dynamic waveforms of three control methods
由于觀測定子磁鏈時用到了定子電阻Rs,下面將給出Rs變化對本文算法的仿真結果。設定子電阻的模型參數為RsM。圖7給出了本文算法在電機轉速為25 r/min,負載轉矩為300 N·m,Rs取不同值時的仿真波形。可以看出,Rs變化不會影響本文算法的轉矩與磁鏈的跟蹤與穩態控制性能,這說明電阻偏差不會對本文算法的轉矩與磁鏈控制性能造成影響,在磁鏈幅值跟蹤上其參考值的情況下,定子電流會隨Rs的增加而逐漸減小。
3.2 實驗結果分析
為了驗證本文所提控制算法的正確性,針對一表貼式永磁同步電機進行實際系統的實驗驗證。系統功率回路由不可控整流器與智能功率模塊(Intelligent Power Module,IPM)相連,輸出連接永磁同步電機。控制電路由浮點型TMS320F28335 DSP為主控芯片,以Cyclone系列FPGA作為輔助控制芯片。在實驗中,k1=900,k2=1 500,k3=25,k4=1 000,γ=0.1,轉速PI控制器Kp=800,Ti=0.14,系統采樣周期為100 ms,開關頻率為5 kHz,實驗電機參數見表1。
為驗證本文控制算法的轉矩和磁鏈跟蹤性能,首先在沒有轉速控制器的條件下對本文算法進行實驗驗證,圖8給出了本文算法的轉矩和磁鏈幅值跟蹤波形。實驗中,參考轉矩為300~-300 N·m的方波信號,參考磁鏈為1.6~0.8 Wb的方波信號。可以看出,本文算法的轉矩與磁鏈可以快速準確地跟蹤其參考信號,同時不存在超調現象,因此本文算法具有良好的轉矩與磁鏈跟蹤性能。
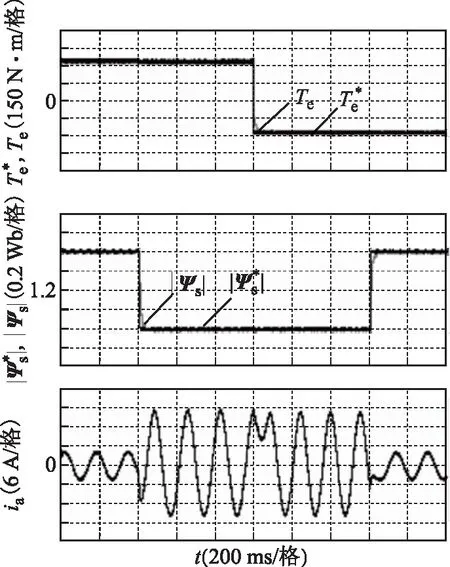
圖8 本文所提方法的轉矩和磁鏈跟蹤實驗波形Fig.8 Tracking experiment waveforms of torque and flux for the proposed approach
為驗證本文控制算法的穩態與動態性能,分別將其與PI控制器[7]和指數趨近律的滑模控制器[12]進行比較,三種控制方法的速度控制器均為PI控制器,圖9 給出了三種方法的穩態波形。實驗中,電機轉速nr為25 r/min,負載轉矩TL為300 N·m。可以看出,本文方法在穩態運行時具有良好的轉矩、磁鏈和電流波形,與PI控制大體相當,這是由于本文方法的控制器中控制函數是連續函數,有效削弱了一階滑模固有的抖振現象,而指數趨近律控制下的轉矩、磁鏈和電流因其控制器中含有不連續開關量,故具有較大的波動。

圖9 nr=25 r/min,TL=300 N·m時的電磁轉矩、定子磁鏈幅值和定子a相電流實驗波形Fig.9 Experiment waveforms of electromagnetic torque,stator flux modulus and a-phase stator current with nr being 25 r/min,TL being 300 N·m
圖10給出了電機在負載突變情況下,三種方法的轉速、電磁轉矩、定子磁鏈幅值和定子a相電流的實驗波形。實驗中,電機轉速為25 r/min,負載轉矩從200 N·m階躍到400 N·m,定子磁鏈幅值參考值為1.63 Wb。由圖10可以看出,在負載發生突變時,三種方法都能迅速地跟蹤轉速和轉矩指令值。由于PI控制下磁鏈控制器的帶寬較小,在負載發生突變時其磁鏈幅值易受到影響,不能保證控制魯棒性,若增大其帶寬,雖然可以減小磁鏈幅值受負載突變的影響,但其對外界噪聲干擾抑制減弱,從而使得磁鏈幅值波動變大。而指數趨近律控制與本文所提方法控制下磁鏈控制器的帶寬較大,且滑模控制結構對外界噪聲干擾不敏感,磁鏈幅值不受轉矩變化的影響,具有較好的控制魯棒性。
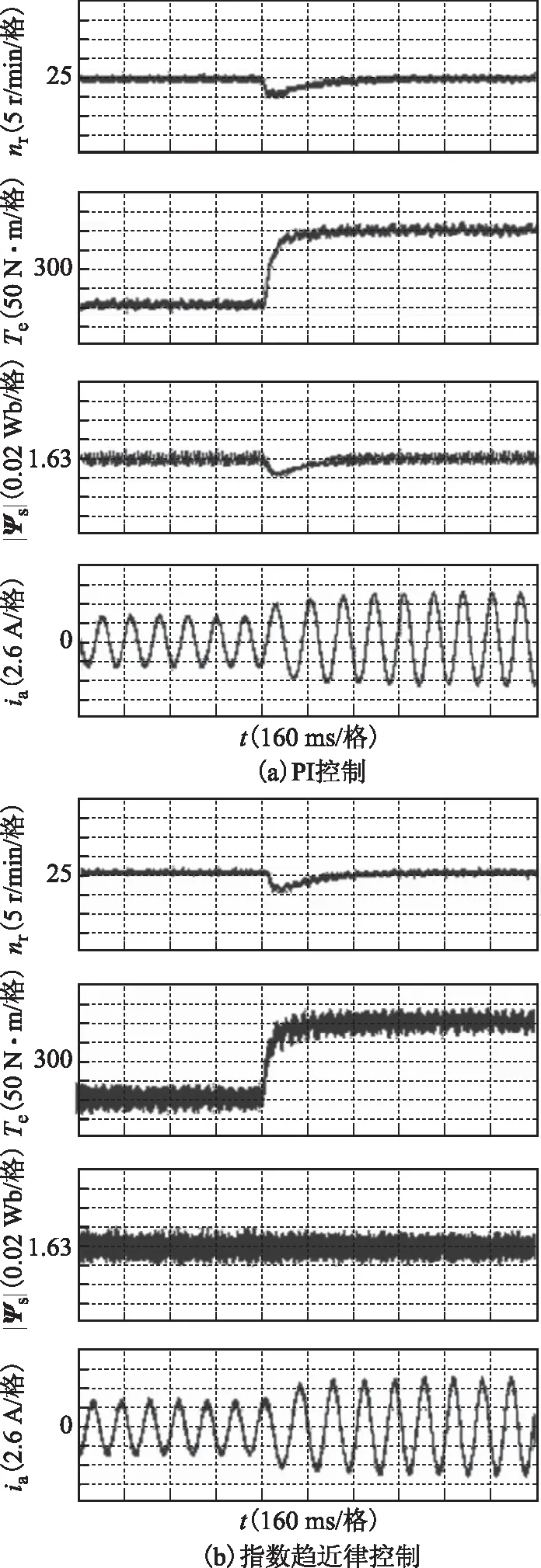
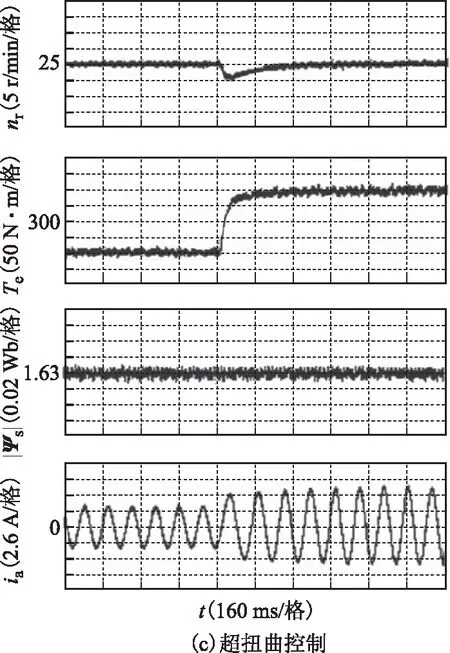
圖10 nr=25 r/min,TL從200 N·m階躍到400 N·m時的轉速、電磁轉矩、定子磁鏈幅值和定子a相電流實驗波形Fig.10 Experiment waveforms of speed,electromagnetic torque,stator flux modulus and a-phase stator current with nr being 25 r/min,TL increasing from 200 N·m to 400 N·m
為驗證本文算法的抗參數變化的能力,在觀測定子磁鏈時用到了定子電阻Rs,下面將給出Rs變化對本文算法的實驗結果。
設定子電阻的模型參數為Rs。圖11分別給出了Rs取不同值時的電磁轉矩、定子磁鏈幅值以及定子a相 電流的實驗波形。實驗中,電機轉速為25 r/min,負載轉矩TL為300 N·m,定子磁鏈幅值參考值為1.63 Wb。由圖11可以看出,Rs變化不會影響本文算法轉矩與磁鏈的跟蹤與穩態控制性能,這說明電阻偏差不會對本文算法的轉矩與磁鏈控制性能造成影響。在磁鏈幅值跟蹤上其參考值的情況下,定子電流會隨Rs的增加而逐漸減小。

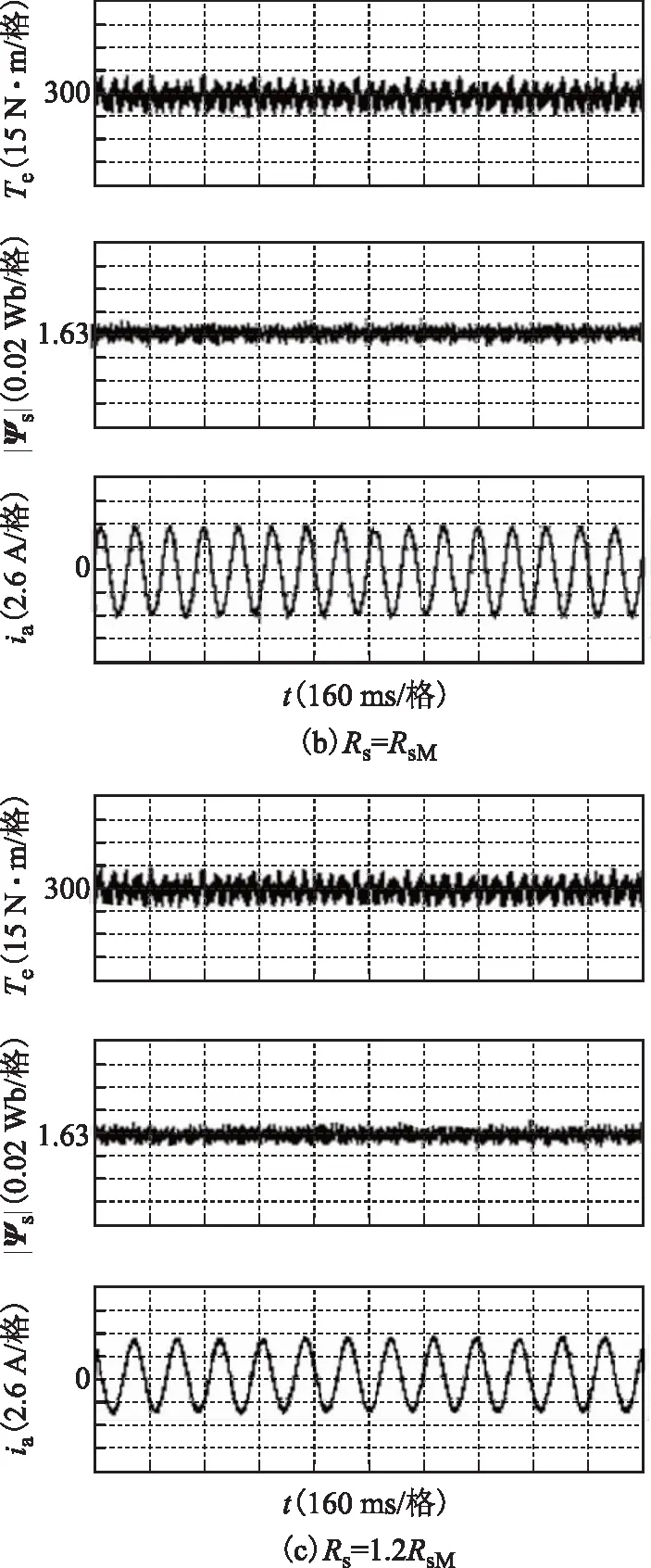
圖11 本文所提方法在不同定子電阻下電磁轉矩、定子磁鏈幅值和定子a相電流實驗波形Fig.11 Experiment waveforms of electromagnetic torque,stator flux modulus and a-phase stator current with different stator resistance for the proposed approach
4 結論
為了克服PI控制DTC-SVM魯棒性差與傳統滑模DTC-SVM存在抖振的缺點,本文提出基于超扭曲算法的直接轉矩控制。其中滑模控制與逆變器開關特性相結合可有效提高系統的動態特性,同時空間矢量調制可保證系統的穩態性能。實驗結果表明,本文所提方法不僅可以有效減小磁鏈和轉矩脈動,還對系統參數變化具有較強的魯棒性能。
[1] 呂帥帥,林輝,馬冬麒.基于最優占空比調制的永磁同步電機直接轉矩控制[J].電工技術學報,2015,30(S1):35-42. Lü Shuaishuai,Lin Hui,Ma Dongqi.Direct torque control for permanent magnet synchronous motor with optimal duty cycle control[J].Transactions of China Electrotechnical Society,2015,30(S1):35-42.
[2] 陳煒,艾士超,谷鑫.基于最小電壓矢量偏差的永磁同步電機直接轉矩控制[J].電工技術學報,2015,30(14):116-121. Chen Wei,Ai Shichao,Gu Xin.Direct torque control for permanent magnet synchronous motor based on minimum vector deviation[J].Transactions of China Electrotechnical Society,2015,30(14):116-121.
[3] Xia Changliang,Wang Shuai,Wang Zhiqiang,et al.Direct torque control for VSI-PMSMs using four-dimensional switching table[J].IEEE Transactions on Power Electronics,2016,31(8):5774-5785.
[4] 劉英培,萬健如,梁鵬飛.基于擴展卡爾曼濾波器和空間電壓矢量調制的永磁同步電機直接轉矩控制[J].中國電機工程學報,2009,29(27):67-74. Liu Yingpei,Wan Jianru,Liang Pengfei.Direct torque control for permanent magnet synchronous motor drive based on extended kalman filter and space vector modulation[J].Proceedings of the CSEE,2009,29(27):67-74.
[5] 邢巖,王旭,劉巖,等.基于空間矢量調制的永磁同步電機新型直接轉矩控制策略[J].電氣傳動,2013(S1):6-10. Xing Yan,Wang Xu,Liu Yan,et al.New direct torque control method for PMSM based on space vector pulse width modulation[J].Electric Drive,2013(S1):6-10.
[6] Tang L,Zhong L,Rahman M F,et al.A novel direct torque controlled interior permanent magnet synchronous machine drive with low ripple in flux and torque and fixed switching frequency[J].IEEE Transactions on Power Electronics,2004,19(2):346-354.
[7] Andreescu G D,Pitic C I,Blaabjerg F,et al.Combined flux observer with signal injection enhancement for wide speed range sensorless direct torque control of IPMSM drives[J].IEEE Transactions on Energy Conversion,2008,23(2):393-402.
[8] Lascu C,Boldea I,Blaabjerg F,et al.Variable-structure direct torque control-a class of fast and robust controllers for induction machine drives[J].IEEE Transactions on Industrial Electronics,2004,51(4):785-792.
[9] 黃慶,黃守道,馮垚徑,等.基于變結構自抗擾的永磁電動機速度控制系統[J].電工技術學報,2015,30(20):31-39. Huang Qing,Huang Shoudao,Feng Yaojing,et al.Variable structure based active-disturbance rejection controller for speed control system of permanent magnet synchronous motor[J].Transactions of China Electrotechnical Society,2015,30(20):31-39.
[10]陸婋泉,林鶴云,馮奕,等.永磁同步電機無傳感器控制的軟開關滑模觀測器[J].電工技術學報,2015,30(2):106-113. Lu Xiaoquan,Lin Heyun,Feng Yi,et al.Soft switching sliding mode observer for PMSM sensorless control[J].Transactions of China Electrotechnical Society,2015,30(2):106-113.
[11]Xu Zhuang,Rahman M F.Direct torque and flux regulation of an IPM synchronous motor drive using variable structure control approach[J].IEEE Transactions on Power Electronics,2007,22(6):2487-2498.
[12]賈洪平,賀益康.永磁同步電機滑模變結構直接轉矩控制[J].電工技術學報,2006,21(1):1-6. Jia Hongping,He Yikang.Variable structure sliding mode control for PMSM DTC[J].Transactions of China Electrotechnical Society,2006,21(1):1-6.
[13]Shtessel Y,Edwards C,Fridman L,et al.Sliding mode control and observation[M].New York:Springer New York,2014.
[14]楊婧,史小平.基于超扭曲算法的無人機動態逆編隊控制器設計[J].系統工程與電子技術,2014,36(7):1380-1385. Yang Jing,Shi Xiaoping.NDI formation controller design for UAV based on super twisting algorithm[J].Systems Engineering and Electronics,2014,36(7):1380-1385.
[15]Levant A.Principles of 2-sliding mode design[J].Automatica,2007,43(4):576-586.
[16]黃進,趙力航,劉赫.基于二階滑模與定子電阻自適應的轉子磁鏈觀測器及其無速度傳感器應用[J].電工技術學報,2013,28(11):54-61. Huang Jin,Zhao Lihang,Liu He.Sensorless control with resistance variation approach based on parallel MRAS and second-order sliding mode observer[J].Transactions of China Electrotechnical Society,2013,28(11):54-61.
[17]Chalanga A,Kamal S,Fridman L,et al.Implementation of super-twisting control:super-twisting and higher order sliding mode observer based approaches[J].IEEE Transactions on Industrial Electronics,2016,63(6):3677-3685.
[18]吳宇,皇甫宜耿,張琳,等.大擾動 Buck-Boost 變換器的魯棒高階滑模控制[J].中國電機工程學報,2015,35(7):1740-1748. Wu Yu,Huangfu Yigeng,Zhang Lin,et al.A robust high order sliding mode for Buck-Boost converters with large disturbances[J].Proceedings of the CSEE,2015,35(7):1740-1748.
[19]Davila J,Fridman L,Levant A.Second-order sliding-mode observer for mechanical systems[J].IEEE Transactions on Automatic Control,2005,50(11):1785-1789.
[20]Shin M H,Hyun D S,Cho S B,et al.An improved stator flux estimation for speed sensorless stator flux orientation control of induction motors[J].IEEE Transactions on Power Electronics,2000,15(2):312-318.
(編輯 于玲玲)
Direct Torque Controlfor Permanent Magnet Synchronous Motor Using Super Twisting Algorithm
SongZhengguang1XiaChangliang1WangZhiqiang2ShiTingna1
(1.School of Electrical Engineering and Automation Tianjin University Tianjin 300072 China 2.Tianjin Key Laboratory of Advanced Technology of Electrical Engineering and Energy Tianjin Polytechnic University Tianjin 300387 China)
In this paper,a direct torque control using super twisting algorithm is proposed for voltage source inverter(VSI)-permanent magnet synchronous motor(PMSM)drive system.The principles of sliding mode control,direct torque control,and space vector modulation are combined to ensure high performance operation,both in the steady state and under transient conditions in this approach with approximately constant switching frequency.It solves the problems of poor robustness in direct torque control with space vector modulation(DTC-SVM)controlled by proportional plus integral controller and chattering in DTC-SVM controlled by slide mode controller.The experiment verified that the proposed method could decrease flux and torque ripples and be robust to parameter variation.
Permanent magnet synchronous motor,space vector modulation,direct torque control,super twisting algorithm
國家自然科學基金項目資助(51407127)。
2016-07-16 改稿日期2016-12-07
10.19595/j.cnki.1000-6753.tces.L70033
TM351
宋爭光 男,1990年生,碩士研究生,研究方向為電機控制。
E-mail:szg1010430111@163.com
夏長亮 男,1968年生,教授,博士生導師,研究方向為電機系統及其控制。
E-mail:motor@tju.edu.cn(通信作者)