一種永磁同步電機失磁故障容錯預測控制算法
2017-08-31 19:02:23張昌凡吳公平馮江華趙凱輝
電工技術學報 2017年15期
關鍵詞:故障
張昌凡 吳公平 何 靜,2 馮江華 趙凱輝
(1.湖南工業大學電氣與信息工程學院 株洲 412001 2.國防科技大學機電工程與自動化學院 長沙 410073 3.中車株洲電力機車研究所有限公司 株洲 412001)
一種永磁同步電機失磁故障容錯預測控制算法
張昌凡1吳公平1何 靜1,2馮江華3趙凱輝1
(1.湖南工業大學電氣與信息工程學院 株洲 412001 2.國防科技大學機電工程與自動化學院 長沙 410073 3.中車株洲電力機車研究所有限公司 株洲 412001)
針對永磁同步電機失磁故障導致牽引系統帶負載能力降低的問題,提出一種基于磁鏈在線檢測容錯預測控制算法。首先,根據永磁同步電機預測控制模型,詳細分析了永磁體發生失磁故障對電流控制和電機運行狀態的影響。其次,設計了基于滑模變結構的觀測器,利用滑模變結構等值控制原理,建立了實時估計永磁體磁鏈算式。通過永磁體磁鏈算式,進而計算狀態電流觀測值。最后,提出了容錯預測控制算法。該算法將狀態電流觀測值作為反饋量輸入到容錯預測控制器中,以使響應電流準確跟蹤給定電流,從而達到容錯控制的目的。通過仿真及實驗驗證,證明了所提算法的可行性和有效性。
永磁同步電機 電流預測控制 失磁故障 容錯預測控制
0 引言
近年來,永磁同步電機得到了越來越廣泛的應用,人們對永磁同步電機的控制性能也提出了更高的要求。矢量控制是交流電機高性能控制最常采用的方法,而電流閉環控制器是其關鍵部分之一。傳統的電流控制器為PI控制器,它以簡易性、魯棒性等優點廣泛應用于永磁交流電機驅動。但這類控制器存在積分飽和[1],并且是一個非線性、多輸入的耦合系統[2],在高性能伺服系統中難以達到所需要的電流環動態性能。與傳統的電流控制器相比,電流預測控制能夠顯著提高電機的動態性能,是永磁同步電機電流控制的最佳控制策略[3-5]。
電流預測控制是基于模型的控制方法,能夠使永磁同步電機電流控制獲得良好的動態和穩態響應。由于在控制器中需要準確地使用電機模型的參數,因此其控制的性能往往受制于電機模型的電感、磁鏈等參數的準確度[6]。而在工程實踐中,永磁同步電機運行工況復雜,轉子永磁體受到電磁、熱、機械等應力會產生失磁故障[7,8]。永磁體失磁故障將會導致控制器電機模型參數與實際電機參數不一致,這將直接影響控制系統的性能,導致牽引系統效率降低、無法輸出額定轉矩以及無法工作在力矩控制模式等問題[9]。
為克服控制器電機模型參數誤差對永磁同步電機控制性能的影響,文獻[10-12]提出了一種改進的永磁同步電機電流環預測控制方法,該方法可以有效降低預測控制器對電感、電阻參數的依賴,但未考慮磁鏈參數對預測控制器的影響。文獻[13]分析了控制器電機模型磁鏈參數不準的情況對電流控制的影響,并提出了解決算法。該文獻認為永磁體磁鏈在運行過程中基本不會發生改變,但永磁體發生失磁故障時,永磁體磁鏈將發生改變。文獻[14]采用級聯的顯式模型預測控制算法對永磁同步電機電流環進行控制,獲得了較高的動態性能和對系統模型參數失配的魯棒性。文獻[15]通過參數在線辨識的方法獲取被控對象的精確數學模型,消除參數不準確對預測控制效果的影響。但文獻[14,15]所提方法只考慮了永磁同步電機的電阻和電感參數的變化,而忽略了永磁體發生失磁后磁鏈的變化。
為確保永磁同步電機高效可靠運行,本文提出了永磁同步電機的容錯預測控制算法,實現了永磁同步電機在失磁故障的情況下穩定運行。首先,介紹了永磁同步電機正常運行時的電流預測控制原理;然后,分析了永磁體發生失磁故障對電流控制和電機運行狀態的影響;最后,在失磁故障能夠實時準確檢測的前提下,提出了容錯預測控制算法。
1 永磁體失磁分析
1.1 永磁同步電機電流預測控制
永磁同步電機在d-q同步旋轉軸系下的電壓方程為[16]
(1)
(2)
其中,磁鏈方程為
(3)
式中,ψd、ψq分別為定子磁鏈在d、q軸上的分量;ud、uq和id、iq分別為d、q軸電壓和電流;ω為電角速度;ψro、R、Ld、Lq分別為永磁體磁鏈、定子電阻和d、q軸電感。
選擇d、q軸電流構成系統狀態變量,由式(1)、式(2)可得永磁同步電機在d-q坐標系下的狀態方程為
(4)
y=Cx
(5)
其中
式中,x、u、y、fa分別為狀態變量、系統輸入、系統輸出、永磁體磁鏈;A、B、C、D為狀態方程系數矩陣。
設計預測控制系統時,當選擇足夠小的采樣周期時,有[17]
式中,Ts為采樣周期。
采用一階歐拉法對式(4)進行離散化,可得永磁同步電機的離散狀態空間函數為
i(k+1)=E(k)i(k)+Fu(k)+P(k)
(6)
其中
i(k)=[id(k)iq(k)]Tu(k)=[ud(k)uq(k)]T
采用預測控制算法對永磁同步電機進行控制,由式(6)得到預測控制器輸出的電壓矢量方程為[13]
u(k)=F-1[i*(k+1)-E(k)i(k)-P(k)]
(7)
永磁同步電機正常工作時,電流預測控制的結構框圖如圖1所示,其中ia、ib為定子電流。首先,將電流指令值i*(k+1)和當前電機的運行狀態i(k)代入式(7),預測控制器將得到使響應電流矢量能夠準確跟蹤給定電流矢量所需的電壓u(k);然后,運用SVPWM方法合成這一輸出電壓。
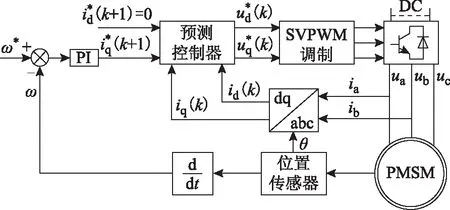
圖1 電流預測控制結構框圖Fig.1 Block diagram of predictive current control
1.2 失磁故障分析
模型預測控制是一種基于被控系統模型的新型控制算法,具有良好的控制性能,但對被控系統模型參數的敏感性較強。然而在復雜的運行工況中,當永磁體發生失磁故障時,會引起永磁同步電機系統模型中的磁鏈發生改變,這將導致控制器中磁鏈參數與實際電機磁鏈參數不一致。因此,如果采用正常情況的被控系統模型預測控制算法對故障電機進行控制,那么失磁故障將會嚴重影響控制系統的性能。下文將主要分析失磁故障對電流控制和電機運行狀態的影響。
當永磁同步電機發生失磁故障時,永磁體磁鏈矢量幅值和方向將發生變化。電機永磁體磁鏈矢量由初始的ψro變化至ψr,電機磁場定向方向與永磁磁鏈方向存在偏差角γ,如圖2所示。相應式(3)的磁鏈方程變為[18]
(8)
式中,Δψrd為永磁體磁鏈ψr在直軸上的變量,Δψrd=ψrcosγ-ψro,且Δψrd<0;Δψrq為永磁體磁鏈ψr在交軸上的變量,Δψrq=ψrsinγ,且Δψrq>0。

圖2 永磁同步電機永磁體磁鏈的變化Fig.2 Variation of PMSM permanent magnet flux linkage
(9)

采用一階歐拉法對式(9)進行離散化,可得故障情況下永磁同步電機的離散狀態空間函數為

(10)
其中
假設永磁同步電機在kTs時刻正常運行,在(k+1)Ts時刻發生失磁故障。由于實際數字控制系統存在一拍延遲,當前kTs控制時刻計算得到的電壓矢量通常需要等到下一個(k+1)Ts控制時刻再施加[19,20]。因此,控制器在kTs時刻首先根據當前電機正常的運行狀態,計算出(k+1)Ts時刻需要作用的電壓矢量,其過程可以用式(7)表示。在(k+1)Ts時刻,由kTs時刻計算得到的電壓矢量作用于發生失磁故障的實際電機模型,產生新的響應電流矢量i(k+1),其過程可以用式(10)表示。

(11)
(12)
其中

定義有效磁鏈[21]為
ψext=ψro+(Ld-Lq)id
(13)
永磁同步電機的電磁轉矩方程表示為[22]
(14)
永磁同步電機的運動方程表示為[23]
(15)
式中,np為電機極對數;Te為電磁轉矩;ψs為永磁同步電機磁鏈空間矢量;ψext為有效磁鏈;is為定子電流空間矢量;TL為負載轉矩;J為轉動慣量。
由式(11)可知,失磁故障后存在電流偏差,即id≠0而為id=Δid>0,這將導致有效磁鏈ψext減小。如要維持式(14)成立,iq將增大,又由式(12)可知失磁故障后存在電流偏差,故iq將進一步增大。而考慮到永磁同步電機穩態運行時受逆變器輸出能力的限制和過載保護的原因,定子電流幅值is不能超出極限值Ismax[24]。電機采用id=0的控制策略,即iq不能超出極限值,故電磁轉矩將減小。電磁轉矩減小后,由于電機給定負載不變,從式(15)可知電機將減速運行。
2 永磁同步電機失磁故障容錯預測控制
2.1 失磁故障容錯預測控制
由以上分析可知,永磁同步電機發生失磁故障時,響應電流矢量與給定電流矢量之間存在偏差。電流偏差會使有效磁鏈減小,定子電流增大,而考慮到定子電流受極限值的約束,即永磁同步電機帶負載能力將下降,電機不能穩定運行。因此,需要提出有效的容錯控制算法來消除電流偏差,從而降低有效磁鏈的減少量,使定子電流在極限值約束范圍內維持電磁轉矩方程平衡。
將故障情況下永磁同步電機的離散狀態空間函數式(10)改寫為
(16)
(17)
(18)
(19)
將式(18)、式(19)代入式(16)、式(17)得
(20)
(21)
選擇d、q軸電流構成系統狀態變量,可得故障情況下永磁同步電機的離散狀態空間函數為

(22)
由式(22)得到故障情況下容錯預測控制器輸出的電壓矢量為
(23)
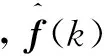
容錯預測控制算法的系統框圖如圖3所示。首先,由失磁故障檢測部分檢測永磁體的磁鏈變化,再由狀態電流觀測部分計算出狀態電流觀測值;然后,將當前電機的運行狀態及狀態電流觀測值反饋到容錯預測控制模塊即式(23)中,以計算使響應電流準確跟蹤給定電流所需作用的電壓矢量u(k);最后,運用SVPWM方法合成這一輸出電壓矢量,從而消除電流偏差,使故障電機穩定運行。
圖3 容錯預測控制算法系統框圖Fig.3 Block diagram of fault-tolerant predictive control algorithm
2.2 失磁故障檢測
對式(9)、式(5)所述系統設計如下滑模觀測器,即

(24)

選取滑模面為
由式(9)、式(5)及式(24)可得觀測器誤差方程為
(25)
當選擇適當的L和H時,則由式(25)確定的觀測器誤差方程將收斂到零。
觀測器收斂性證明:
選取如下正定函數作為Lyapunov函數,即
(26)
對式(26)求導,并將式(25)代入得
(27)
其中

(28)
式中,k3=min{k1,k2}。

由Lyapunov穩定性理論可知:所設計的觀測器 式(24)漸進穩定。
(29)


(30)
為減少滑模運動的抖動,采用連續函數取代符號函數,因此可得如下失磁故障重構算法,即
(31)
式中,δ1和δ2均為大于零的微小常數。
3 仿真結果與分析

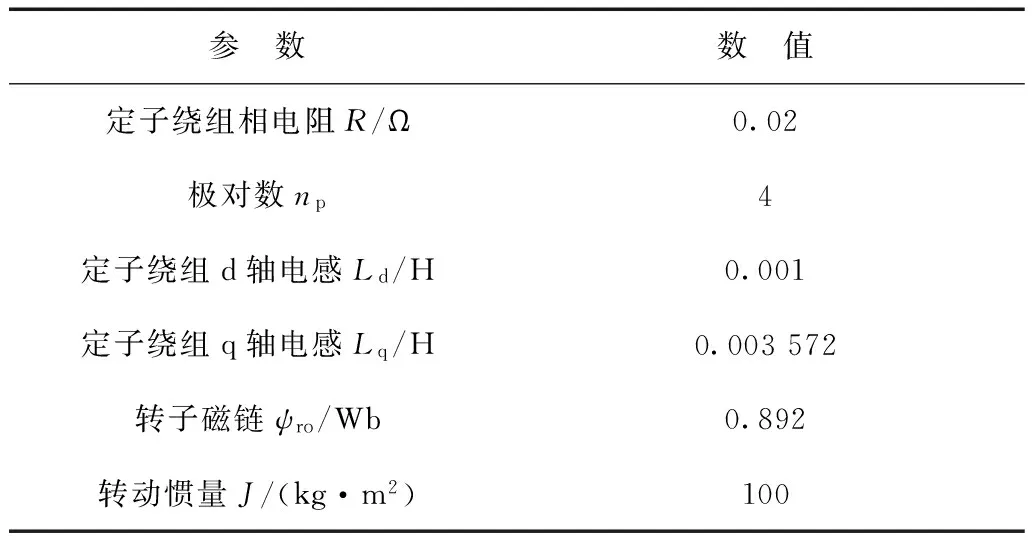
表1 電機參數Tab.1 The nominal value of the motor parameters
3.1 失磁故障對電機控制的影響
在永磁體發生失磁故障的情況下,采用正常情況的被控系統模型預測控制算法對故障電機進行控制時的仿真波形如圖4~圖7所示。
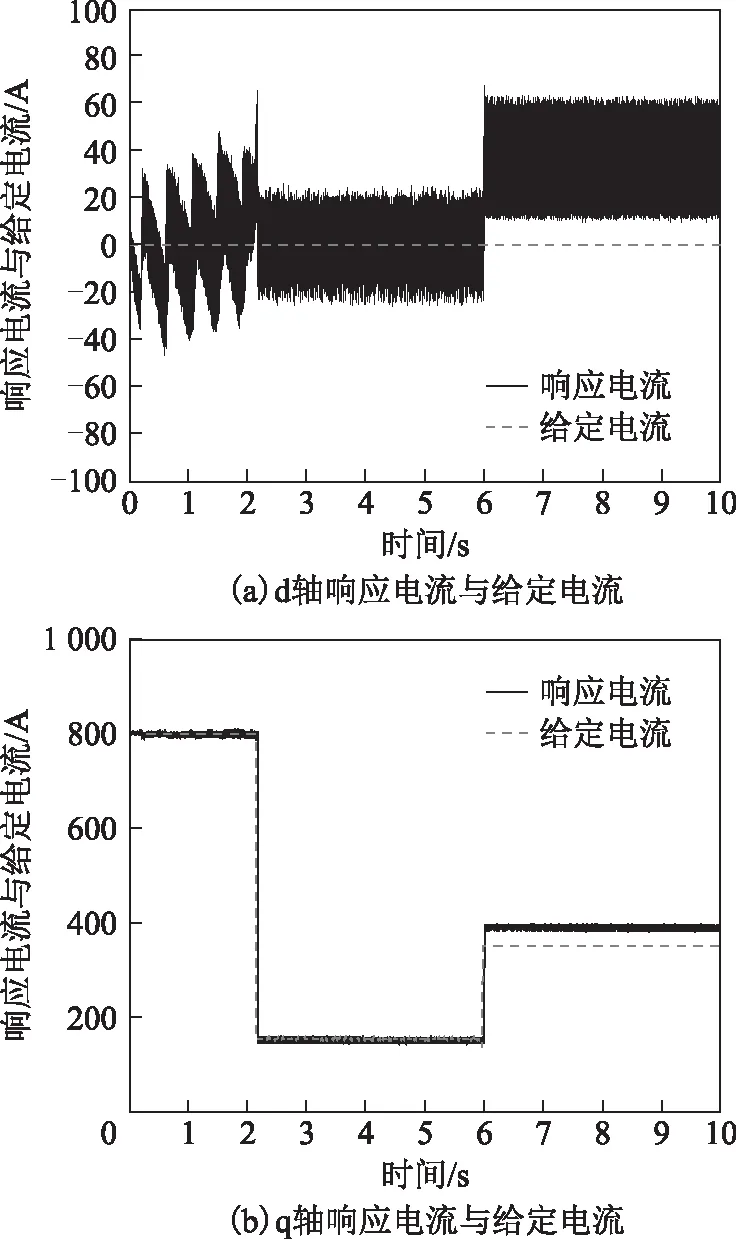
圖4 電流響應仿真結果Fig.4 Simulation results of current response

圖5 永磁同步電機磁鏈空間矢量仿真結果Fig.5 Simulation results of flux space vector of the PMSM

圖6 定子電流空間矢量幅值仿真結果Fig.6 Simulation results of stator current space vector magnitude

圖7 轉矩和轉速仿真結果Fig.7 Simulation results of torque and speed
由式(13)、式(14)計算電流偏差為Δid(k+1)=33.6 A, Δiq(k+1)=20.2 A。由圖4可以看出,在6s時永磁體發生失磁故障后,d、q軸響應電流與給定電流之間存在偏差,且響應電流大于給定電流。由圖5、圖6可知,在6s時永磁體發生失磁故障后,由于電流偏差的存在,永磁同步電機磁鏈空間矢量幅值將減小,定子電流受到電流極限值的約束,導致故障電機帶負載能力下降,電機減速運行,如圖7所示。從仿真結果可以看出,仿真波形與理論分析相符。
3.2 容錯預測控制
在永磁體發生失磁故障的情況下,采用容錯預測控制算法對故障電機進行控制時的仿真波形如圖8~圖14所示。
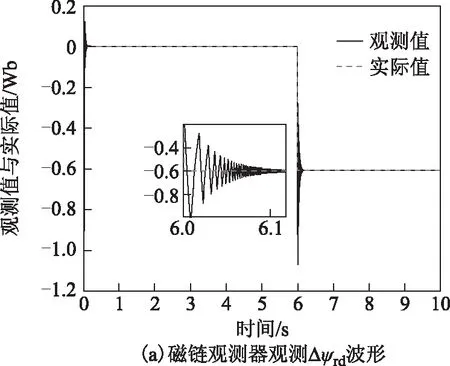
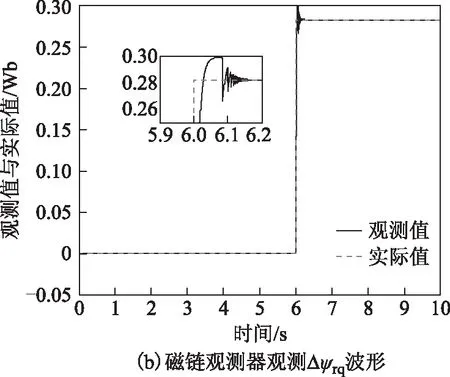
圖8 磁鏈觀測仿真結果Fig.8 Simulation results of flux observation
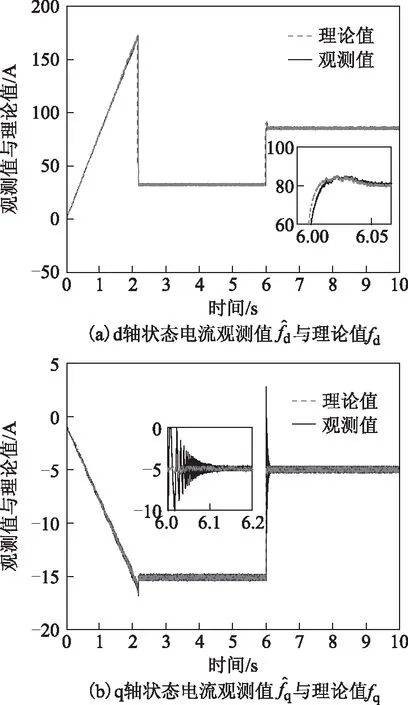
圖9 狀態電流觀測值仿真結果Fig.9 Simulation results of state current observation
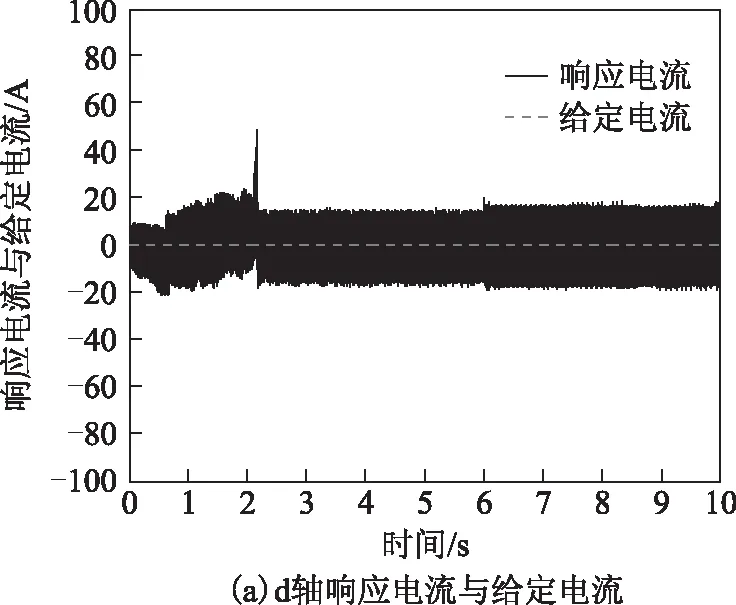

圖10 電流響應仿真結果Fig.10 Simulation results of current response

圖11 電流偏差仿真結果Fig.11 Simulation results of current error
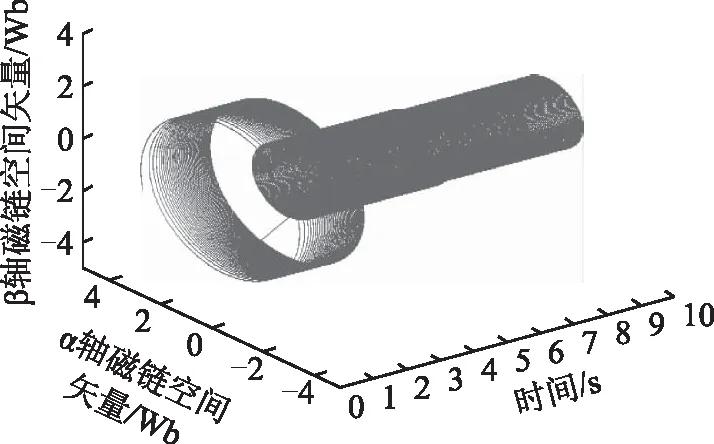
圖12 永磁同步電機磁鏈空間矢量仿真結果Fig.12 Simulation results of flux space vector of the PMSM

圖13 定子電流空間矢量幅值仿真結果Fig.13 Simulation results of stator current space vector magnitude
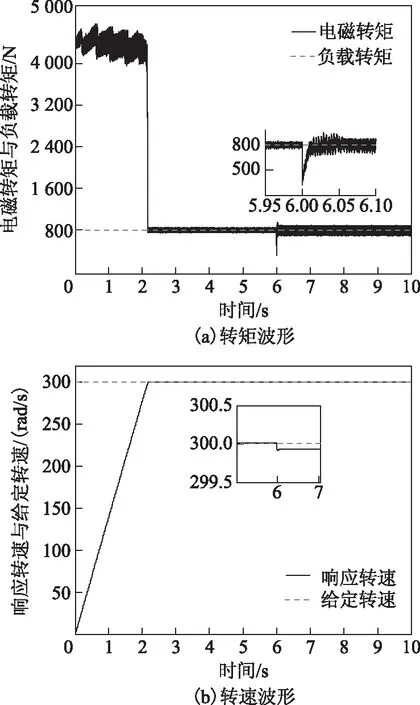
圖14 轉矩和轉速仿真結果Fig.14 Simulation results of torque and speed
由圖8、圖9可以看出,在6s時永磁體發生失磁故障后,磁鏈觀測器能夠準確觀測永磁體磁鏈的變化,且能夠準確計算出狀態電流觀測值。當采用容錯預測控制算法時,將狀態電流觀測值作為反饋量輸入到控制器后,d、q軸響應電流能夠準確跟蹤給定電流,如圖10所示。由圖11可知,響應電流與給定電流之間的偏差量基本為零,達到了消除電流偏差的目的。由于d、q軸響應電流能夠準確跟蹤給定電流,從而降低了有效磁鏈的減少量,所以永磁同步電機磁鏈空間矢量幅值變化較小,如圖12所示。因此維持電磁轉矩方程平衡所需要的定子電流較小,在極限值的約束范圍內,如圖13所示。這將使電磁轉矩方程和運動方程成立,即故障電機工作在力矩控制模式,電機穩定運行,如圖14所示。
4 實驗結果與分析
由于真實電機的失磁情況較難以模擬,所以本文采用仿真機來模擬電機失磁,建立電機系統半實物仿真實驗平臺,再次驗證本文所提理論算法的可行性和有效性。半實物仿真實驗由DSP控制器、OP5600仿真機、相關連接線以及軟件部分的多電機系統模型和上位機監控界面組成。實驗系統使用真實的DSP控制器TMS320F2812,永磁同步電機由RT-lab(OP5600)模擬。
圖15為不采用容錯預測控制的實驗波形。由圖15a可以看出,在6s時永磁體發生失磁故障后,響應電流與給定電流之間存在偏差,且響應電流大于給定電流。由圖15b可以看出,在6s時永磁體發生失磁故障后,電磁轉矩下降,電機減速運行。圖16為采用容錯預測控制后的實驗波形。由圖16a可以看出,本文所設計的觀測器能準確地觀測出狀態電流值。由圖16b可以看出,采用容錯預測控制算法后響應電流可以準確跟蹤給定電流。由圖16c可以看出,采用容錯預測控制算法后電磁轉矩可以帶動給定負載轉矩,電機穩定運行。由圖15、圖16可知,實驗結果與仿真結果一致。
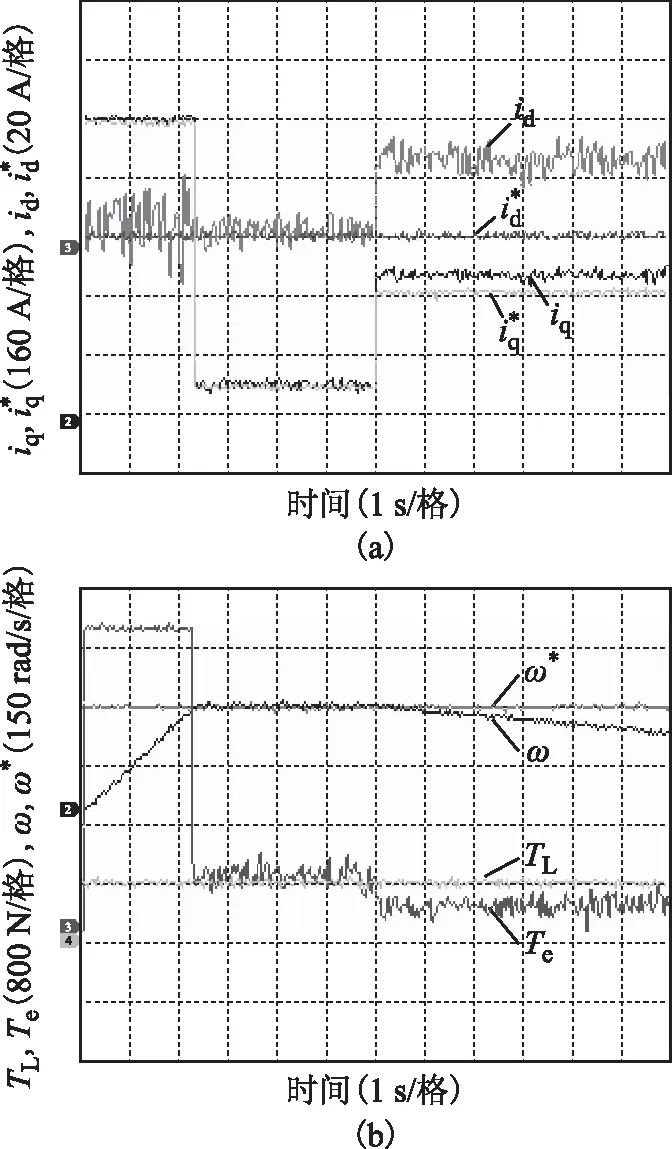
圖15 不采用容錯預測控制實驗波形Fig.15 Experimental wave forms of without the fault-tolerant predictive control
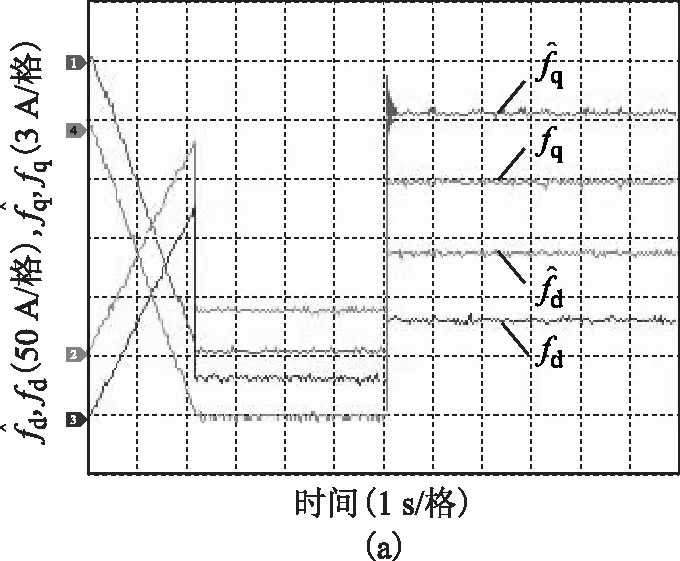
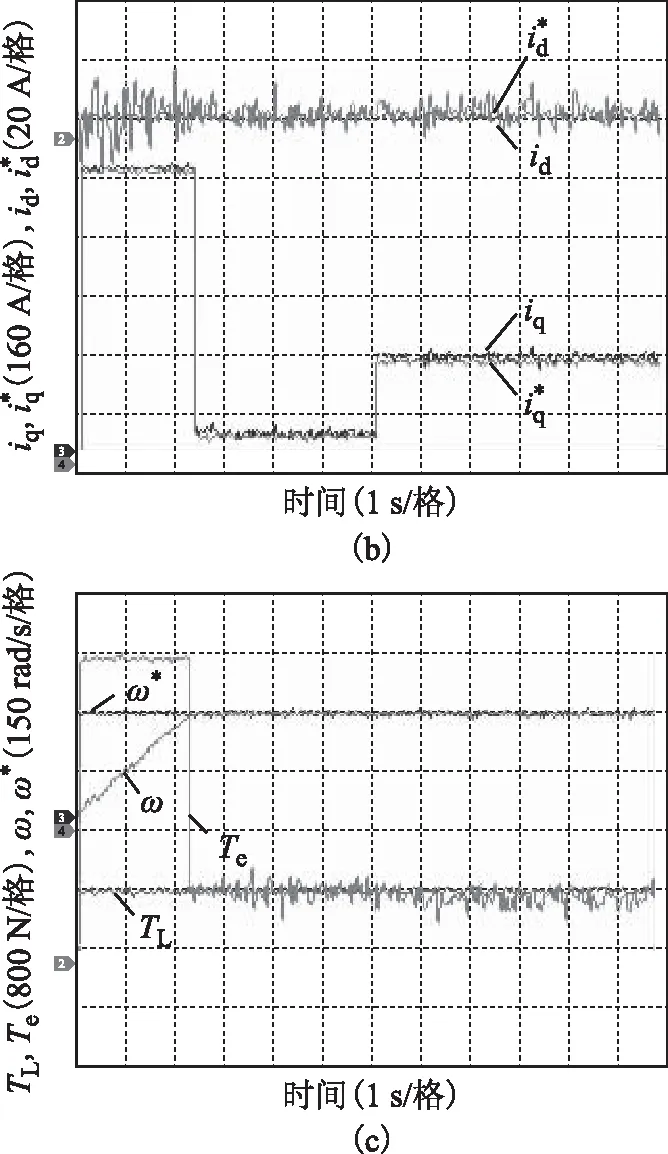
圖16 采用容錯預測控制實驗波形Fig.16 Experimental wave forms of fault-tolerant predictive control
5 結論
在永磁同步電機牽引系統矢量控制的基礎上,針對永磁體失磁故障會影響電流控制性能,致使牽引系統帶負載能力下降的問題,本文提出了一種基于磁鏈在線檢測的容錯預測控制算法。得出以下結論:
1)通過分析永磁體發生失磁故障時對電流控制和電機運行狀態的影響,可知失磁故障會導致響應電流矢量與給定電流矢量之間存在偏差。電流偏差將使有效磁鏈減小,而又由于定子電流受極限值的約束,因此電機將無法工作在力矩控制模式,電機減速運行。
2)本文所提的基于磁鏈在線檢測容錯預測控制算法實質是通過在線實時監測永磁體磁鏈失磁情況,并且實時計算狀態電流觀測值,將狀態電流觀測值作為反饋量輸入到預測控制器中,以使響應電流準確跟蹤給定電流,降低有效磁鏈的減少量,從而達到容錯控制的目的。
3)通過仿真和實驗結果證明了該方法能及時對電機失磁故障進行有效控制。為此,該方法有利于拓展永磁同步電機在環境惡劣、可靠性要求較高的場合的應用。
[1]BolognaniS,BolognaniS,PerettiL,etal.Designandimplementationofmodelpredictivecontrolforelectricalmotordrives[J].IEEETransactionsonIndustrialElectronics,2009,56(10):1925-1936.
[2] 吳荒原,王雙紅,辜承林,等.內嵌式永磁同步電機改進型解耦控制[J].電工技術學報,2015,30(1):30-37.WuHuangyuan,WangShuanghong,GuChenglin,etal.AnimproveddecouplingcontrolstrategyfortheIPMSMS[J].TransactionsofChinaElectrotechnicalSociety,2015,30(1):30-37.
[3]CortesP,KazmierkowskiMP,KennelRM,etal.Predictivecontrolinpowerelectronicsanddrives[J].IEEETransactionsonIndustrialElectronics,2008,55(8):4312-4324.
[4]VargasR,RodriguezJ,AmmannU,etal.Predictivecurrentcontrolofaninductionmachinefedbyamatrixconverterwithreactivepowercontrol[J].IEEETransactionsonIndustrialElectronics,2008,55(4):4362-4371.
[5]HassanAA,KassemAM.Modeling,simulationandperformanceimprovementsofaPMSMbasedonfunctionalmodelpredictivecontrol[J].ArabianJournalforScienceandEngineering,2013,38(11):3071-3079.
[6]ChenHongjun,QuJialong,LiuBo,etal.ArobustpredictivecurrentcontrolforPMSMbasedonextendedstateobserver[C]//IEEEInternationalConferenceonCyberTechnologyinAutomation,Control,andIntelligentSystems(CYBER),2015:1698-1703.
[7]HongJongman,HyunD,LeeSB,etal.Automatedmonitoringofmagnetqualityforpermanent-magnetsynchronousmotorsatstandstill[J].IEEETransactionsonIndustryApplications,2010,46(7):1397-1405.
[8]TorregrossaD,KhoobrooA,FahimiB.PredictionofacousticnoiseandtorquepulsationinPMsynchronousmachineswithstaticeccentricityandpartialdemagnetizationusingfieldreconstructionmethod[J].IEEETransactionsonIndustrialElectronics,2010,59(10):934-944.
[9]CiminiG,FossiV,IppolitiG,etal.Modelpredictivecontrolsolutionforpermanentmagnetsynchronousmotors[C]//IECON2013-39thAnnualConferenceoftheIEEEIndustrialElectronicsSociety,2013:5824-5829.
[10]王偉華,肖曦,丁有爽.永磁同步電機改進電流預測控制[J].電工技術學報,2013,28(3):50-55.WangWeihua,XiaoXi,DingYoushuang.Animprovedpredictivecurrentcontrolmethodforpermanentmagnetsynchronousmotors[J].TransactionsofChinaElectrotechnicalSociety,2013,28(3):50-55.
[11]王宏佳,徐殿國,楊明.永磁同步電機改進無差拍電流預測控制[J].電工技術學報,2011,26(6):39-45.WangHongjia,XuDianguo,YangMing.Improveddeadbeatpredictivecurrentcontrolstrategyofpermanentmagnetmotordrives[J].TransactionsofChinaElectrotechnicalSociety,2011,26(6):39-45.
[12]牛里,楊明,劉可述,等.永磁同步電機電流預測控制算法[J].中國電機工程學報,2012,32(6):131-137.NiuLi,YangMing,LiuKeshu,etal.Apredictivecurrentcontrolschemeforpermanentmagnetsynchronousmotors[J].ProceedingsoftheCSEE,2012,32(6):131-137.
[13]王庚,楊明,牛里,等.永磁同步電機電流預測控制電流靜差消除算法[J].中國電機工程學報,2015,35(10):2544-2551.WangGeng,YangMing,NiuLi,etal.AstaticcurrenterroreliminationalgorithmforPMSMpredictivecurrentcontrol[J].ProceedingsoftheCSEE,2015,35(10):2544-2551.
[14]MariethozS,DomahidiA,MorariM.High-bandwidthexplicitmodelpredictivecontrolofelectricaldrives[J].IEEETransactionsonIndustryApplications,2012,48(7):1980-1992.
[15]JeongSJ,SongSH.Improvementofpredictivecurrentcontrolperformanceusingonlineparameterestimationinphasecontrolledrectifier[J].IEEETransactionsonPowerElectronics,2007,22(5):1820-1825.
[16]張越雷,黃科元,蔣智,等.基于估算電流模型的永磁同步電機無速度傳感器控制[J].電工技術學報,2016,31(11):68-74.ZhangYuelei,HuangKeyuan,JiangZhi,etal.SpeedsensorlesscontrolofPMSMbasedonestimatedcurrentmodel[J].TransactionsofChinaElectrotechnicalSociety,2016,31(11):68-74.
[17]王東文,李崇堅,吳堯,等.永磁同步電機的模型預測電流控制器研究[J].電工技術學報,2014,29(1):73-79.WangDongwen,LiChongjian,WuYao,etal.Modelpredictivecurrentcontrolschemeforpermanentmagnetsynchronousmotors[J].TransactionsofChinaElectrotechnicalsociety,2014,29(1):73-79.
[18]HeJing,ZhangChangfan,MaoSongan,etal.Demagnetizationfaultdetectioninpermanentmagnetsynchronousmotorsbasedonslidingobserver[J].JournalofNonlinearSciencesandApplications,2016,29(6):2039-2048.
[19]張宸宇,梅軍,鄭建勇,等.基于內置重復控制器改進無差拍的有源濾波器雙滯環控制方法[J].電工技術學報,2015,30(22):124-132.ZhangChenyu,MeiJun,ZhengJianyong,etal.Activepowerfilterdoublehysteresismethodwithimproveddeadbeatcontrolbasedonbuilt-inrepetitivecontroller[J].TransactionsofChinaElectrotechnicalsociety,2015,30(22):124-132.
[20]CortesP,RodriguezJ,SilvaC,etal.Delaycompensationinmodelpredictivecurrentcontrolofathree-phaseinverter[J].IEEETransactionsonIndustrialElectronics,2012,59(2):1323-1325.
[21]BoldeaI,PaicuMC,AndreescuGD,etal.“ActiveFlux”DTFC-SVMsensorlesscontrolofIPMSM[J].IEEETransactionsonEnergyConversion,2009,24(2):314-322.
[22]NiuFeng,LiKui,WangBingsen,etal.Comparativeevaluationofdirecttorquecontrolstrategiesforpermanentmagnetsynchronousmachines[J].IEEETransactionsonPowerElectronics,2016,31(2):1408-1424.
[23]蓋江濤,黃守道,黃慶,等.基于負載觀測的永磁電機驅動系統自抗擾控制[J].電工技術學報,2016,31(18):29-36.GaiJiangtao,HuangShoudao,HuangQing,etal.Active-disturbancerejectioncontrollerforpermanentmagnetmotordrivesystemcontrolbasedonloadobserver[J].TransactionsofChinaElectrotechnicalSociety,2016,31(18):29-36.
[24]何亞屏,文宇良,許峻峰,等.基于多模式SVPWM算法的永磁同步牽引電機弱磁控制策略[J].電工技術學報,2012,27(3):92-99.HeYaping,WenYuliang,XuJunfeng,etal.High-powerpermanentmagnetflux-weakeningstrategybasedonmulti-modeSVPWM[J].TransactionsofChinaElectrotechnicalSociety,2012,27(3):92-99.
[25]劉金琨.滑模變結構控制MATLAB仿真[M].2版.北京:清華大學出版社,2012.
(編輯 于玲玲)
Fault-Tolerant Predictive Control for Demagnetization Faults in Permanent Magnet Synchronous Machine
ZhangChangfan1WuGongping1HeJing1,2FengJianghua3ZhaoKaihui1
(1.College of Electrical and Information Engineering Hunan University of Technology
Zhuzhou 412001 China 2.College of Mechatronics and Automation National University of Defense Technology
Changsha 410073 China
3.CRRC Zhuzhou Electrical Locomotive Research Institute Co.Ltd Zhuzhou 412001 China)
In the rail transit traction systems,the permanent magnet demagnetization faults in the permanent magnet synchronous motor(PMSM)can lead to the problem of load capacity reduction.A fault-tolerant predictive control method based on the on-line detection of flux linkage is proposed.Firstly,the effect of current control and motor running state caused by demagnetization of permanent magnet will be analyzed in great detail with conforming to predictive control model of permanent magnet synchronous motor.Then,a real-time estimation equation for permanent magnet flux linkage is established based on the equivalent control principle of sliding mode variable structure,whereas the observer is designed based on sliding mode variable structure.Through the permanent magnet flux linkage formula,and then calculate the state current observation value.Finally,a fault-tolerant predictive control algorithm is constructed.The algorithm used state current observation value as feedback to input the fault-tolerant predictive controller.And it can eliminate the current error,which will achieve the purpose of fault-tolerant control.Simulation and experimental results demonstrate the feasibility and effectiveness of the proposed algorithm.
Permanent magnet synchronous motor(PMSM),predictive current control,demagnetization faults,fault-tolerant predictive control
國家自然科學基金(61473117)、湖南省自然科學基金(2016JJ5012,2017JJ4031)和電傳動控制與智能裝備湖南省重點實驗室(2016TP1018)資助。
2016-07-29 改稿日期2016-12-21
10.19595/j.cnki.1000-6753.tces.L70059
TM351
張昌凡 男,1960年生,教授,博士生導師,研究方向為交流傳動及故障診斷。
E-mail:zhangchangfan@263.net(通信作者)
吳公平 男,1992年生,碩士研究生,研究方向為電力電子與電力傳動。
E-mail:gongping_wu@163.com
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(2016年4期)2016-06-01 12:10:19
電測與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年8期)2015-04-17 03:32:52
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年7期)2015-04-17 02:12:40
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39