三軸旋轉慣性導航系統的旋轉控制建模研究
2017-09-03 04:45:13查峰覃方君李京書葉斌
兵工學報 2017年8期
關鍵詞:系統
查峰, 覃方君, 李京書, 葉斌
(1.海軍工程大學 電氣工程學院, 湖北 武漢 430033; 2.慣性技術航空科技重點實驗室, 陜西 西安 710061)
三軸旋轉慣性導航系統的旋轉控制建模研究
查峰1, 覃方君1, 李京書1, 葉斌2
(1.海軍工程大學 電氣工程學院, 湖北 武漢 430033; 2.慣性技術航空科技重點實驗室, 陜西 西安 710061)
為了減小載體運動對于旋轉慣性導航系統誤差調制作用的影響,建立三軸旋轉慣性導航系統在隔離載體運動條件下的控制模型。基于三軸框架結構定義合理的坐標系,分析載體運動在三軸框架中的傳遞過程,建立載體運動與周期性旋轉慣性測量單元運動之間的數學解析關系。在此基礎上,根據歐拉動力學方程,建立三軸框架運動與電機力矩、載體運動之間的動力學模型。聯合載體運動傳遞過程和動力學模型,建立三軸旋轉慣性導航系統在隔離載體運動條件下的控制模型,得到了載體運動過程中外環軸上的轉動慣量隨俯仰角而實時變化的解析形式。仿真和實際實驗驗證了理論分析結果,可為旋轉控制算法設計提供理論參考。
控制科學與技術; 慣性導航; 旋轉控制; 動力學模型; 旋轉慣性導航系統
0 引言
旋轉慣性導航系統是通過周期性旋轉慣性測量單元(IMU),改變慣性器件的指向以調制其常值誤差和慢變誤差,從而提高系統精度[1]。按照IMU旋轉軸數目不同,可將系統分為單軸、雙軸以及三軸旋轉慣性導航系統。采用不同旋轉策略的慣性導航系統,其誤差特性和傳遞規律也不相同[2-3]。
目前針對旋轉慣性導航系統的研究,大多數從旋轉策略出發,分析各個誤差源在不同旋轉策略下的誤差傳播特性[1-6]。文獻[4]集中分析了單軸、雙軸旋轉慣性導航系統對于器件誤差和系統誤差的調制效果,并指出由于雙軸系統不能提供空間的3個自由度,因此載體運動會與器件誤差耦合從而引起慣性導航系統誤差。文獻[5-6]提出了三軸旋轉慣性導航系統方案,并指出如果能夠使IMU不受載體角運動影響,相對于慣性空間做周期性旋轉,可以進一步抑制載體角運動、地球自轉與刻度系數誤差的耦合。因此,隔離載體角運動的旋轉策略研究受到廣泛重視[7-8]。
若隔離載體角運動,需要構建三軸框架的旋轉慣性導航系統,使得IMU相對于慣性空間有規律轉動。載體存在角運動(橫搖、縱搖和航向運動)時,三軸框架因隔離載體角運動使得框架軸系間角度關系實時變化,不同軸系間存在運動耦合。因此,針對隔離載體運動條件下的三軸框架進行旋轉控制變得較為復雜。目前,針對三軸穩定平臺控制建模一般將每個軸向回路作為單獨控制系統進行分析[9-10],沒有建立統一的三軸控制系統的數學模型。針對不同軸向間的運動耦合僅以干擾力矩等效,未進行定性分析。文獻[11-12]對三軸轉臺的運動耦合與解耦問題進行了研究,但分析還是基于單軸控制回路模型,僅僅將耦合運動看成是干擾力矩,通過自適應算法抑制干擾力矩影響。文獻[13]關注了多軸旋轉中的耦合關系,并對非線性解耦進行了分析,可為三軸轉臺的解耦提供一種參考。但耦合分析時基于給定的三軸轉臺的已知模型,未對一般三軸框架系統的旋轉控制進行分析建模,且三軸轉臺應用場合一般為某一軸轉動時其他兩軸靜止。三軸旋轉慣性導航在隔離載體角運動時,3個軸向同時轉動,軸系間的運動傳遞、動力方程更加復雜。
本文針對隔離載體運動條件下三軸旋轉慣性導航系統,通過構建合理的坐標系,從理論上推導因載體角運動引起的框架運動在不同軸間的傳遞形式,得到陀螺輸出、框架運動和電機驅動力矩之間的數學關系,建立三軸旋轉慣性導航系統的旋轉控制模型,為控制算法設計提供理論參考。
1 三軸框架結構與坐標系定義
按結構組成不同,可將慣性導航系統分為平臺式和捷聯式兩種。捷聯式慣性導航直接將IMU固定聯接在載體上,直接量測載體的運動信息。平臺式慣性導航為IMU提供一個穩定平臺,平臺能夠有效隔離載體的角運動而跟蹤某一坐標系,在該坐標系內對加速度信息進行提取從而得到速度和位置。20世紀80年代以來,隨著慣性技術及系統誤差補償技術的發展,逐漸形成了旋轉慣性導航系統的結構形式。
1.1 三軸框架結構
旋轉慣性導航系統是一種不同于捷聯式慣性導航系統和平臺式的中間形式,其結構可理解為在捷聯式基礎上按照旋轉軸的數目增加了由電機驅動的旋轉機構,使原來固定聯接的IMU可以繞一定規律旋轉。而對于三軸旋轉慣性導航系統,其框架結構與普通的平臺式慣性導航類似,其示意圖如圖1所示。

圖1 三軸框架結構示意圖Fig.1 Structure of triaxial frame
圖1中IMU利用三軸框架聯接,由外向內分別為外環r、內環p、方位環a,在每個環架轉動軸的兩個端面分別裝有力矩電機Mr、Mp、Ma和角度傳感器Fr、Fp、Fa. 方位環與IMU直接固定聯接,其轉軸稱為方位軸,方位軸通過框架聯接在內環上,內環通過內環軸聯接在外環上,外環通過外環軸與基座聯接。從上述結構可以看出,在力矩電機Mr、Mp、Ma的驅動下,外環可以繞外環軸相對于基座轉動,內環可以繞內環軸相對于外環轉動,IMU可以繞方位軸相對于內環轉動。
1.2 坐標系定義
為了便于分析IMU在三軸框架下的運動,首先對本文坐標系做如下定義:
1)基座(載體)坐標系OXbYbZb,簡稱b系,與載體基座固定聯接,其Xb軸、Yb軸、Zb軸三軸分別指向載體的右方向、前方向、上方向。
2) IMU坐標系OXpYpZp,簡稱p系,該坐標系與IMU固定聯接,Zp軸沿方位軸向上,Xp軸、Yp軸在與Zp軸垂直的一個平面上,構成右手直角坐標系。
3)內環坐標系OXfYfZf,簡稱f系,與內環固定聯接,Zf軸為IMU方位軸(同Zp軸),Xf軸沿內環軸指向右側,Yf軸與Xf軸、Zf軸垂直構成右手直角坐標系。
4)外環坐標系OXrYrZr,簡稱r系,與外環固定聯接,Xr軸沿平臺內環軸指向右(同Xf軸),Yr軸沿平臺外環軸指向前,Zr軸與Xr軸、Yr軸垂直構成右手直角坐標系。由于外環平面與內環平面不一定垂直,Zr軸與方位軸指向并不始終一致。
5)電機坐標系OXmYmZm,簡稱m系,因為沿方位軸Zp軸、內環軸Xf軸、外環軸Yr軸各裝有一個力矩電機,故OXfYrZp組成了力矩電機坐標系,記為OXmYmZm. 需要注意的是,載體存在角運動時,方位軸、內環軸和外環軸不一定正交,因此電機坐標系不一定是正交坐標系。

下面根據上述坐標系和符號定義,分析載體角運動條件下IMU的絕對角運動。
2 IMU的絕對角運動分析


(1)
而基座轉動的X軸和Z軸與外環屬于剛性約束,因此基座轉動的X軸和Z軸分量剛性傳遞到外環。由于外環相對于載體系轉過角度Q,因此基座轉動傳遞到外環坐標的分量為
(2)
將上述關系寫成矩陣形式有
(3)

(4)
同理,外環轉動的Y軸和Z軸與內環屬于剛性約束,因此外環轉動的Y軸和Z軸分量剛性傳遞到內環。由于內環相對于外環系X軸轉過角度P,因此外環轉動傳遞到內環坐標的分量為
(5)
將上述關系寫成矩陣形式有
(6)
由此得到了內環相對于慣性系轉動的絕對角速度。同時,內環轉動會傳遞到方位軸上,即IMU上。由于方位軸與內環坐標系Z軸重合,因此內環坐標系轉動的Z軸分量將被隔離,此時方位環轉過了角度A. 類似以上分析,內環轉動傳遞到IMU上可以寫成如下形式:
(7)
IMU的方位軸為Z軸,因此得到其絕對角速度為

(8)
依次將(3)式、(6)式代入(8)式,得到載體轉動傳遞到IMU上的形式為
(9)
(9)式表示了IMU相對于慣性系的絕對角速度。從(9)式可以看出,第1個系數矩陣表示電機坐標系轉動到IMU坐標系的傳遞矩陣,而第2個系數矩陣表示載體運動通過剛性約束傳遞到IMU坐標系的傳遞矩陣。
為了后續分析,可記作:
(10)

3 三軸力矩方程
根據歐拉動力學方程,IMU的轉動是繞坐標原點的定點轉運,其電機力矩方程[14]可以表示為
(11)


(12)
對(12)式求導后代入(11)式得
(13)
在確定臺體(方位環)的絕對角速度后,根據(13)式可得作用在臺體上的力矩。需要注意的是,對于臺體只有與其緊鄰的內框架對其具有反作用力矩,同時內框架只有外框架對其有反作用力矩。由內向外,可以依次求得各框架上的作用力矩。
3.1IMU的力矩方程
設IMU繞IMU坐標系3個軸向的轉動慣量為Jpx、Jpy、Jpz,由于IMU為最內層框架,因此不存在反作用力矩。根據歐拉動力學方程,可得

(14)

(15)
3.2IMU與內環組合體
IMU繞方位軸轉動,同時IMU與內環框架一起繞內環軸轉動。設IMU與內環組合體在內環坐標系3個軸向上的轉動慣量為Jfx、Jfy、Jfz,根據歐拉動力學方程可得內環框架上的動力學方程為

(16)
由于IMU與內環組合體繞內環坐標系X軸轉動,設其摩擦力矩為Df,因此忽略角速度乘積項,可得內環軸上的力矩方程為
(17)
將(9)式代入(17)式,忽略角速度乘積項得

(18)
3.3 外環、內環與IMU組合體
外環、內環與IMU的組合體繞外環軸轉動。設該組合體在外環坐標系3個軸向上的轉動慣量為Jrx、Jry、Jrz,根據歐拉動力學方程可得內環框架上的動力學方程為
(19)
由于外環、內環與IMU的組合體繞外環坐標系Y軸轉動,設其摩擦力矩為Dr,因此忽略角速度乘積項,可得外環軸上的力矩方程為

(20)
聯合(15)式、(18)式、(20)式可得三軸旋轉慣性導航系統的三軸框架的力矩方程。顯然,方位軸上的力矩方程相對獨立,只與該軸向上的角速度和角加速度有關。內環軸與外環軸會因為方位角A和俯仰角P而產生耦合。
假設臺體在IMU的水平方向上對稱,記Jpx=Jpy=Jpz=Jp0,則三軸框架的力矩方程可簡化為

(21)
上述力矩方程組表示了在三軸框架的力矩與每個軸向上的轉動角速度關系。而在三軸旋轉慣性導航系統的控制過程中,力矩電機利用陀螺儀輸出數據進行控制,使得IMU能夠隔離載體運動,同時在固定坐標系內按規律旋轉。從第3個力矩方程可知,當載體存在角運動時,其外環軸上的轉動慣量隨轉動角度P變化,這對系統控制算法提出了更高要求。
4 系統控制建模與分析

(22)
綜上所述,(1)式、(4)式、(8)式表示三軸旋轉慣性導航系統的三軸框架在力矩電機作用下產生的角運動。該角運動通過(22)式傳遞到IMU上,從而被陀螺儀敏感而輸出角運動信息。三軸旋轉慣性導航系統的控制模塊根據陀螺儀輸出的電壓信息Ug,經過相應的電壓電流轉換為電流信號,轉換系數為ka,因此有控制電流ia的關系式:
ia=kaUg.
(23)
采用合適的控制算法(一般為PID控制)控制框架電機的驅動力矩。三軸旋轉慣性導航系統一般采用直流力矩電機,三軸框架系統在驅動力矩作用下轉動,電機輸出力矩與電樞電流ia呈比例關系:
Tm=kmia.
(24)
綜合(23)式、(24)式得到了陀螺控制信息與電機輸出力矩的關系為
Tm=kmkaUg=KmUg.
(25)
在電機力矩Tm作用下框架軸開始轉動,轉動被傳遞到IMU上,從而形成閉環反饋形式,由此構建了三軸旋轉慣性導航系統的控制模型。
根據上述控制流程,由(21)式、(22)式、(25)式可得三軸旋轉慣性導航系統的控制框圖如圖2所示。

圖2 三軸旋轉慣性導航的控制框圖Fig.2 Control block diagram of triaxial rotating INS

(26)



圖3 三軸旋轉慣性導航的解耦控制框圖Fig.3 Block diagram of decoupling control of triaxial rotating INS

5 仿真與試驗
首先進行三軸旋轉慣性導航系統的旋轉控制仿真,三軸系統的仿真物理參數參照實驗室實際雙軸穩定平臺設定。設IMU、內環、外環及其組合體在空間內具有對稱結構,IMU 3個軸向的轉動慣量Jpx=Jpy=Jpz=1.5 kg·m2,IMU與內環框架在3個軸向的轉動慣量Jfx=Jfy=Jfz=1.8 kg·m2,同時,IMU與內環、外環的組合體在3個軸向的轉動慣量Jrx=Jry=Jrz=2.2 kg·m2. 3個軸向電機的力矩系數Kmx=Kmy=Kmz=3.95 N·m/V.

根據艦船在海上的運動情況,設橫搖、縱搖、航向的幅值θ0=12°、γ0=5°、φ0=4°,周期分別為10 s、8 s和12 s,初始相位分別為φ1=10°、φ2=20°、φ3=30°.
為了隔離其他誤差源對控制效果的影響,仿真中不考慮器件誤差、外界擾動等其他誤差,利用單回路整定理想的PID參數進行三軸慣性導航旋轉控制仿真。
首先根據控制系統各參數,分別對方位環、內環和外環進行單回路控制系統仿真。為有效觀測載體運動周期內控制誤差的變化,仿真時間設為24 s. 利用臨界比例度法整定每個通道的PID參數,然后利用整定的PID參數,進行上述角運動下方位環、內環和外環的單回路控制仿真,其控制誤差如圖4所示。由圖4可知,整定的PID參數對單個回路取得了滿意的控制效果。

圖4 單通道旋轉控制誤差Fig.4 Rotation control error of single axis
在此基礎上,利用單回路整定的PID參數,進行三軸旋轉慣性導航系統的控制。控制誤差如圖5所示。從圖5可以看出,航向軸(方位軸)誤差與單通道回路相同,不受耦合影響。而縱搖軸和橫搖軸誤差與單回路控制相比顯著增加,且呈現出周期性的波動。通過改變載體運動周期和誤差頻率分析可知其周期性與載體運動相關,由此驗證了本文理論分析結果。
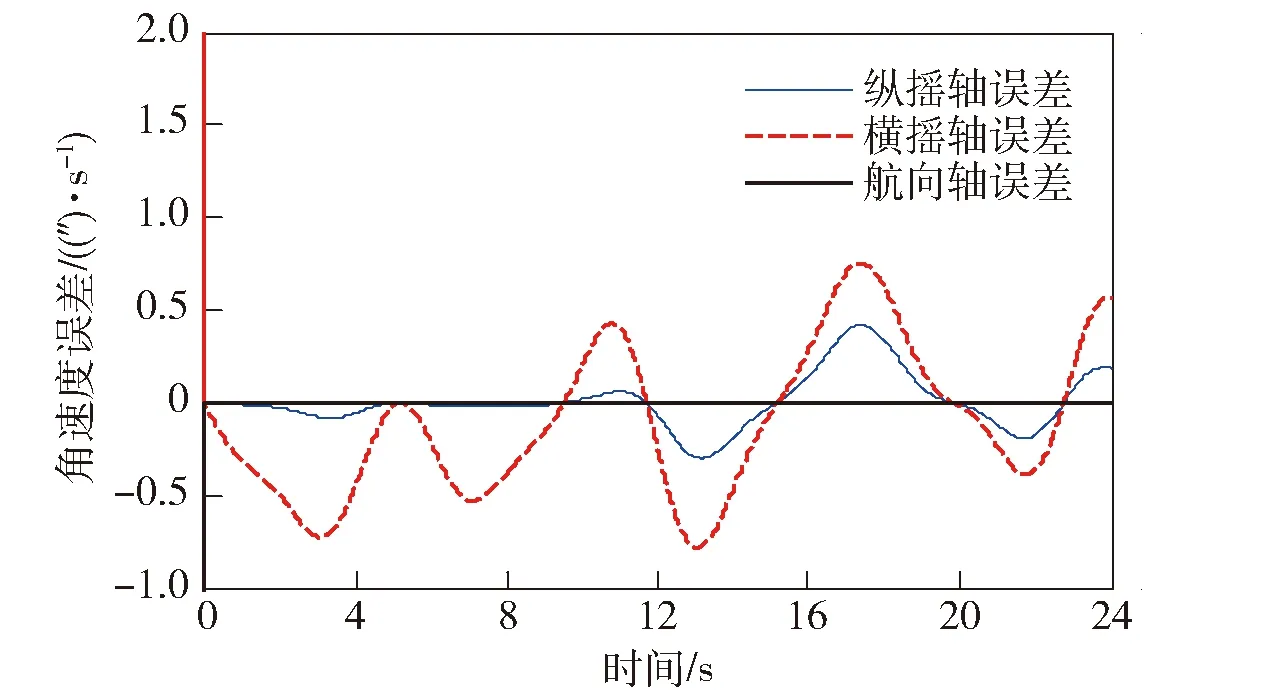
圖5 三軸旋轉控制誤差Fig.5 Rotation control errors of three axes
為了進一步驗證本文控制系統建模的準確性,進行了雙軸穩定平臺(兩個水平軸可以旋轉,方位軸固定)的控制系統試驗。如圖6所示,將雙軸穩定平臺安置在搖擺臺上,由搖擺臺模擬載體運動,運動周期10 s. 首先利用整定的PID參數分別進行單通道的控制試驗,控制誤差如圖7所示(需要指出:圖7中數據的階躍變化是由于角速度傳感器的分辨率所致),可見系統控制平穩。在利用整定的PID參數進行雙軸控制系統試驗,由于兩個回路的耦合產生了與搖擺同周期的控制誤差(見圖8),進一步驗證了本文的理論分析結果。
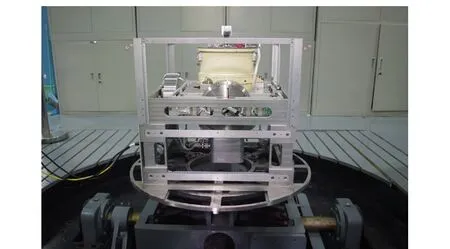
圖6 雙軸穩定平臺在搖擺臺上的控制試驗Fig.6 Control test of two-axis stable platform on rocking table

圖7 單通道控制誤差Fig.7 Rotation control error of single axis
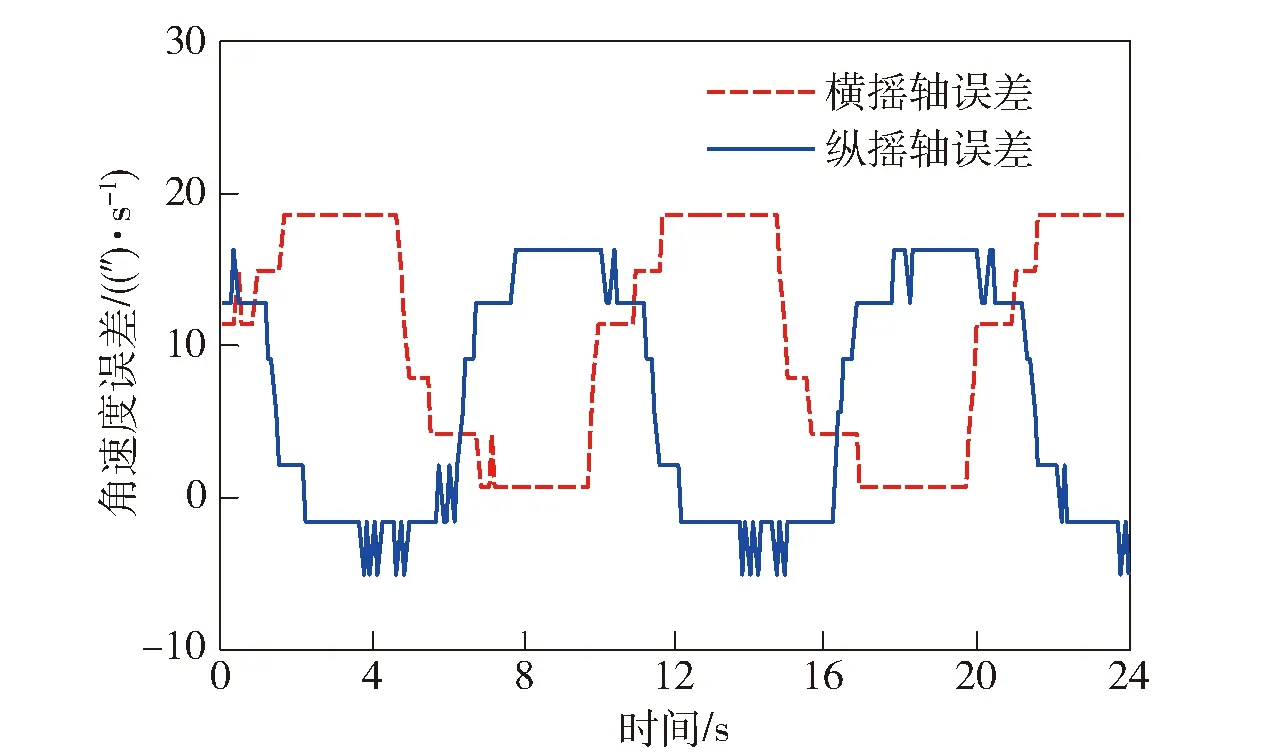
圖8 雙軸控制誤差Fig.8 Rotation control errors of two axes
6 結論
為了最大程度上減小載體運動和地球轉動對旋轉慣性導航誤差的抑制效果,使IMU繞慣性系而非載體系旋轉的方案受到廣泛重視。在多軸旋轉條件下,隔離載體角運動使得各軸之間的運動相互耦合和影響,系統運動和控制模型更加復雜。本文在建立三軸框架坐標系的基礎上,分析載體運動到IMU的傳遞過程與形式,建立了各框架運動的數學解析關系。根據歐拉動力學方程,推導了在隔離載體運動條件下陀螺輸出、驅動力矩和三軸框架轉動角速度之間的動力學方程。在此基礎上,建立了三軸旋轉慣性導航系統的三軸控制模型與方框圖。通過控制模型可知:除IMU坐標系的方位軸可以獨立控制外,內外環的框架運動相互耦合,且外環軸上的轉動慣量隨載體俯仰角變化而實時變化。仿真與實際試驗驗證了本文的理論分析結果。后續研究應根據建立的三軸旋轉慣性導航系統的三軸控制模型,設計科學、合理的旋轉控制算法以提高載體角運動條件下的控制精度。
References)
[1] 袁保倫.四頻激光陀螺旋轉式慣導系統研究[D].長沙:國防科學技術大學,2007. YUAN Bao-lun. Research on rotating inertial navigation system with four-frequency differential laser gyroscope[D]. Changsha: National University of Defense Technology, 2007. (in Chinese)
[2] Yuan B L,Miao D,Han H L. Error compensation of an optical gyro INS by multi-axis rotation[J]. Measurement Science and Technology,2012, 23(2):25102-25110.
[3] 楊國梁,王瑋.基于雙軸旋轉的慣導系統誤差自補償技術[J].北京航空航天大學學報,2012,38(4):519-524. YANG Guo-liang, WANG Wei. Error auto-compensation technology of inertial navigation system based on double-axis rotation[J].Journal of Beijing University of Aeronautics and Astronautics,2012,38(4):519-524. (in Chinese)
[4] Zha F,Xu J N,Qin F J.Error analysis for SINS with different IMU rotation scheme[C]∥International Asia Conference on Informatics in Control, Automation and Robotics.Wuhan:IEEE,2010:422-426.
[5] 孫楓,王秋瀅.三軸旋轉捷聯慣導系統旋轉方案設計[J].儀器儀表學報,2013,34(1):65-72. SUN Feng, WANG Qiu-ying. Rotation scheme design for modulated SINS with three rotating axes[J].Chinese Journal of Scientific Instrument,2013,34(1):65-72. (in Chinese)
[6] Zhang l,Liu J Y,Lai J Z. Rotating fiber optic gyro strapdown inertial navigation system with three rotating axes[J].Transactions of Nanjing University of Aeronautics and Astronautics, 2008, 25(4):289-293.
[7] 許江寧,查峰,李京書,等.單軸旋轉慣導系統的"航向耦合效應"抑制算法[J].中國慣性技術學報, 2013,21(1):26-30. XU Jiang-ning, ZHA Feng, LI Jing-shu, et al. Analysis and compensation for heading-coupling effect of single-axis rotating INS[J].Journal of Chinese Inertial Technology,2013,21(1):26-30. (in Chinese)
[8] 張倫東,練軍想,吳美平,等.單軸旋轉慣導系統載體航向隔離方法研究[J].儀器儀表學報,2012,33( 6):1247-1253. ZHANG Lun-dong, LIAN Jun-xiang, WU mei-ping, et al. Research on yaw angle isolation method of inertial navigation system based on single-axis rotation[J].Chinese Journal of Scientific Instrument,2012,33(6):1247-1253.(in Chinese)
[9] 周向陽,趙強.航空遙感三軸慣性穩定平臺雙速度環控制[J].中國慣性技術學報,2014,21(4):439-445. ZHOU Xiang-yang, ZHAO Qiang. Dual rate-loop control method of three-axis inertially stabilized platform for aerial remote sensing application[J]. Journal of Chinese Inertial Technology,2014,21(4):439-445.(in Chinese)
[10] 楊蒲,李奇.三軸陀螺穩定平臺控制系統設計與實現[J].中國慣性技術學報,2007,15(2):171-176. YANG Pu,LI Qi. Design and realization of control system for three-axis gyro stabilized platform[J]. Journal of Chinese Inertial Technology,2007,15(2):171-176.(in Chinese)
[11] 李付軍,雒寶瑩,曾軍高,等.3軸電動轉臺動力耦合分析及抑制策略[J].上海交通大學學報,2011,45(2):202-206. LI Fu-jun,LUO Bao-ying,ZENG Jun-gao, et al. Analysis and control strategy of a three-axis electric rotary table dynamic coupling[J]. Journal of Shanghai Jiao Tong University,2011,45(2):202-206.(in Chinese)
[12] 林存海,曹廣鋒.基于改進型重復控制的三軸轉臺解耦與控制[J].光電技術應用,2014,29(2):79-86. LIN Cun-hai, Cao Guang-feng. Decoupling and control of three-axis turret based on modified repetitive control system [J]. Electro-optic Technology Application, 2014, 29 (2):79-86.(in Chinese)
[13] 王茂,邵長東.帶有軸間動力學解耦的三軸轉臺自適應控制[J].中國慣性技術學報,2003,11 (5) :5-11. WANG Mao, SHAO Chang-dong. Adaptive control for three-axle table based on dynamics decoupling between frames[J]. Journal of Chinese Inertial Technology, 2003,11 (5):5-11.(in Chinese)
[14] 高鐘毓.慣性導航系統技術[M]. 北京:清華大學出版社,2012. GAO Zhong-yu. Inertial navigation system technology[M]. Beijing:Tsinghua University Press,2012. (in Chinese)
[15] 劉維平,袁磊,劉西俠. 三軸全輪轉向車輛水平集成控制研究[J].兵工學報,2016,37(2):203-209. LIU Wei-ping,Yuan Lei, LIU Xi-xia. Study of integrated control of all-wheel-steering three-axil vehicle[J]. Acta Armamentarii,2016,37(2):203-209.(in Chinese)
[16] 王昭磊,王青,冉茂鵬,等.基于自適應模糊滑模的復合控制導彈制導控制一體化反演設計[J].兵工學報,2015,36 (1) :78-85. WANG Zhao-lei, WANG Qing, RAN Mao-peng, et al. Integrated guidance and control backstepping design of blended control missile based on adaptive fuzzy sliding mode control [J]. Acta Armamentarii,2015,36(1):78-85.(in Chinese)
Rotation Control Modeling of Triaxial Rotating Inertial Navigation System
ZHA Feng1, QIN Fang-jun1, LI Jing-shu1, YE Bin2
(1.College of Electrical Engineering, Naval University of Engineering, Wuhan 430033, Hubei, China;2.Aviation Key Laboratory of Science and Technology on Inertia, Xi’an 710061, Shaanxi, China)
A control model of triaxial rotating inertial navigation system (RINS) is established to reduce the influence of carrier movement on the error modulation. A reasonable coordinate system is defined based on the triaxial frame structure, and then the transfer process of the carrier motion from the base to initial measurement unit (IMU) is analyzed to find the mathematical relationship between carrier motion and IMU motion. A dynamic model of triaxial frame motion, motor torque and carrier transport power is established based on Euler dynamic equation. A dynamic model of triaxial frame motion,motor torque and carrier motion is established according to Euler dynamic equation. And a control model of triaxial RINS under the condition of carrier motion isolation is established by using the proposed dynamic model and the motion transfer process. Accordingly, the analytical form of real-time change in rotary inertia on the outer ring axis is obtained, which is verified by simulation and actual test.
control science and technology; inertial navigation; rotation control; dynamic model; rotating inertial navigation system
2016-12-08
國家自然科學基金項目(61503404、41404002);國家重大科學儀器開發專項項目(2011yq12004502); 航空科學基金項目(20150816002);海軍工程大學自主立項基金項目(20161577、425517K256)
査峰(1984—), 男,講師, 博士。E-mail: zha_feng@126.com
U666.12+4
A
1000-1093(2017)08-1610-09
10.3969/j.issn.1000-1093.2017.08.020
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
