典型控制規律滑翔飛行器的軌跡預測方法*
2017-09-03 10:17:22張洪波黃景帥李廣華湯國建
現代防御技術 2017年4期
關鍵詞:方法
張洪波,黃景帥,李廣華,2,湯國建
(1.國防科技大學 航天科學與工程學院,湖南 長沙 410073;2.空軍航空大學 飛行器與動力系,吉林 長春 130022)
典型控制規律滑翔飛行器的軌跡預測方法*
張洪波1,黃景帥1,李廣華1,2,湯國建1
(1.國防科技大學 航天科學與工程學院,湖南 長沙 410073;2.空軍航空大學 飛行器與動力系,吉林 長春 130022)
針對臨近空間高超聲速滑翔飛行器機動能力強、軌跡靈活多變的特點,提出了一種基于典型控制規律的高超聲速滑翔飛行器軌跡預測方法。在前期先驗信息的基礎上,將典型控制規律下的控制參數——攻角和傾側角建模成一階Gauss- Markov過程,聯合飛行器在半速度坐標系下的運動微分方程組成擴展的狀態變量,選擇飛行器的經緯高與速度大小作為無跡卡爾曼濾波的觀測量并對控制參數進行濾波辨識,結合控制參數的辨識值重構其規律,進而預測飛行器的軌跡。通過仿真分析了對跳躍和非跳躍2種典型飛行軌跡的預報效果,結果表明所提方法對傾側角不翻轉的情況具有良好的預測精度。
高超聲速滑翔飛行器;典型控制規律;Gauss- Markov過程;參數辨識;無跡卡爾曼濾波;軌跡預測
0 引言
臨近空間高超聲速滑翔飛行器(hypersonic glide vehicle,HGV)是一類飛行馬赫數大于5,依靠氣動升力在臨近空間內實現長時間遠距離飛行的飛行器。它既可由空間軌道釋放再入,也可由助推火箭從地面發射到指定高度后再入[1]。HGV突破了常規彈道式彈頭的再入模式,具備超遠程、持續機動和快速到達的能力,給現有的防空反導系統帶來了極大的挑戰,因此受到了廣泛的關注。目前,典型的試驗型號有美國的HTV- 2(hypersonic technology vehicle- 2)和AHW(advanced hypersonic weapon)[2]。
由于HGV飛行速度快,通常只能采用迎面攔截的策略,導引速度較低的攔截器去接近HGV。迎面攔截需要通過精確預測HGV的飛行軌跡來獲取預測命中點,降低攔截彈在中制導飛向預測命中點過程中修正偏差的能量消耗,創造良好的中末制導交班條件。然而,HGV的持續機動能力使其無固定飛行軌跡,難以預知未來機動時刻,導致預測模型建立不準確,預測精度較低。雖然對于防御方而言,HGV的控制規律是未知的,但是由于在整個飛行過程中受過載、動壓和駐點熱流等約束的限制,控制參數一般會遵循一定的規律,特別是攻角的復雜變化對HGV的姿態控制是不利的,這給HGV的軌跡預測帶來了可能[3]。文獻[4]探討了非慣性彈道預報的技術可行性,給出了解析法、數值積分法和函數逼近法3種彈道外推預報方法。文獻[5]通過分析與彈道導彈目標彈道預測的差異,提出了基于彈道規劃設計、濾波理論和幾何理論的3種高超聲速飛行器彈道預測方法。文獻[4-5]僅僅是提供了對HGV軌跡預測的思路,并沒涉及具體實現。目前,針對HGV軌跡預測的方法主要分為基于動力學或運動學模型兩大類。基于動力學模型的方法通常先通過跟蹤估計出氣動參數、升阻比或控制參數的變化趨勢,然后研究其變化規律或借助函數擬合工具給出未來時刻的變化趨勢,進而代入動力學模型進行軌跡預測,該方法一般需要HGV的部分先驗信息,在無先驗信息的條件下實現難度較大[6-8]。基于運動學模型的方法通常先通過跟蹤估計出加速度的變化趨勢,然后利用函數擬合或選擇最佳機動模型給出未來時刻的變化趨勢,進而代入運動學模型進行軌跡預測,該方法一般不需要HGV的先驗信息,但可能需要目標的持續跟蹤信息[3,9]。與傳統基于動力學或運動學模型的方法不同,文獻[10]以廣義回歸神經網絡GRNN(generalized regression neural network)理論為依據,提出了一種基于誤差修正的GRNN高超聲速飛行器軌跡預測方法,給軌跡預測研究提供了一種新思路。由于對HGV軌跡預測的研究剛剛起步加之HGV軌跡多變,上述所提方法均處于探索階段,存在模型建模不準、預報精度低或適用性差的缺點,仍需不斷深入地研究。
鑒于HGV在滑翔階段飛行時間長,留給攔截系統的反應時間相對充裕,攔截概率高[11],本文因此針對HGV的滑翔段進行了軌跡預測的研究。首先根據前期對HGV運動狀態的跟蹤濾波結果,對典型控制規律下HGV的控制參數進行辨識,通過對控制參數的重構進行軌跡預測,為研究高精度高可靠性的HGV軌跡預測方法提供了理論基礎與方向導引。
1 飛行走廊建模
1.1 約束條件
HGV在飛行過程中受諸多復雜約束條件的影響,主要包括熱流密度、動壓、過載、控制量、航路點、禁飛區等過程約束及起點、終端等端點約束,復雜的約束條件將相應地對HGV的飛行軌跡產生不同程度的運動限制。本文主要研究過程約束中熱流密度、動壓和過載約束對HGV飛行軌跡的影響。
(1)
式中:Kn表示常數,與飛行器的頭部半徑和材料有關;g0=9.806 65 m/s2,為海平面地球引力加速度。考慮到飛行器的控制能力,為了限制其彈道發生跳躍,一般會增加零傾側角平衡滑翔約束條件,即
(2)
在實際應用中認為θ是小量,cosθ≈1。
1.2 飛行走廊數學描述
飛行器安全飛行時所滿足的約束條件的交集稱為飛行走廊。通常情況下,對飛行走廊在飛行剖面中進行描述,主要包括動壓-速度(q-v)、阻力加速度-速度(D-v)、高度-速度(H-v)、阻力加速度-能量(D-E)等剖面,這里采用在阻力加速度-速度剖面內建立飛行走廊數學模型,其余類似。
將式(1),(2)中各表達式轉換為阻力加速度和速度的函數表達式,得
(3)
從而,可得到D-v剖面內的飛行走廊上下邊界為
(4)
文獻[3]通過仿真得到了D-v剖面內飛行走廊的上下邊界,發現HGV在初始再入階段熱流密度約束起決定作用,隨著飛行速度的降低其不再起決定作用。
2 典型控制規律下的控制參數辨識
2.1 控制參數建模
雖然HGV具有持續機動能力,軌跡靈活多變,但是受到各種約束和自身控制能力的限制,在實際HGV的軌跡設計與制導中,控制參數的變化規律會選擇得盡可能簡單。為滿足熱流密度約束和射程能力的需要,攻角一般選擇為速度的分段線性函數。在標準軌跡制導中,傾側角通常在初始再入段時采用常值,滑翔段時采用方位角誤差走廊進行符號的翻轉控制,大小由飛行剖面確定[3]。經過大量的仿真計算驗證,該制導規律下的傾側角符號在不翻轉時近似為時間的線性函數。在預測校正制導中,為了迭代的方便,傾側角也均采用簡單的線性或分段線性函數來描述[1]。
由于控制參數的變化趨勢并不復雜,根據一般參數辨識的方法,可將攻角和傾側角建模成一階Gauss- Markov過程[12]。即
(5)
式中:εα和εν為高斯白噪聲。
2.2 控制參數辨識
結合HGV在半速度坐標系下的運動方程[1,13],將控制參數與其中的6個狀態變量組成新的擴展狀態變量,表示為
(6)
其對應的微分方程為
(7)
很明顯,式(7)具有強耦合性和強非線性,特別是攻角隱含在升力中,對其進行線性化將非常繁瑣,因此采用無跡卡爾曼濾波(unscented Kalman filter,UKF)[14]對控制參數進行辨識,即
(8)
式中:T為采樣時間;wk為系統過程噪聲,其協方差矩陣為Qk。
由地面雷達前期的觀測數據,利用非線性濾波的理論可估計出HGV在地面雷達坐標系中的位置和速度。為了與式(6)中的變量統一,需將估計出的位置信息轉換為緯度、經度和地心距的形式。聯合估計出的速度,選擇該4個變量作為控制參數辨識濾波的觀測量,即
(9)
因此,系統的觀測方程為
(10)
式中:
υk為觀測噪聲。
在HGV的跟蹤濾波中,狀態變量X′的前6個分量通常為位置和速度在地面雷達坐標系下的分量。因此,υk對應的協方差矩陣Dk可通過X′估計誤差的協方差矩陣P中的元素進行求解得到。這里假設速度與其他3個量是不相關的,則速度對應的方差也即Dk的第1個元素為

(11)

(12)
式中:x,y,z分別為HGV在地心坐標系下的位置分量。因此,Dk的表達式為
(13)
3 基于典型控制規律的軌跡預測
若假設HGV飛行過程中根據其發射位置、光電特性、彈道特性等方面的信息對飛行器進行了有效識別,并通過前期情報搜集和飛行器反設計,已獲得飛行器的本體參數。從理論上講可對典型控制規律下的HGV進行軌跡預測,預測的流程可用圖1進行表示。
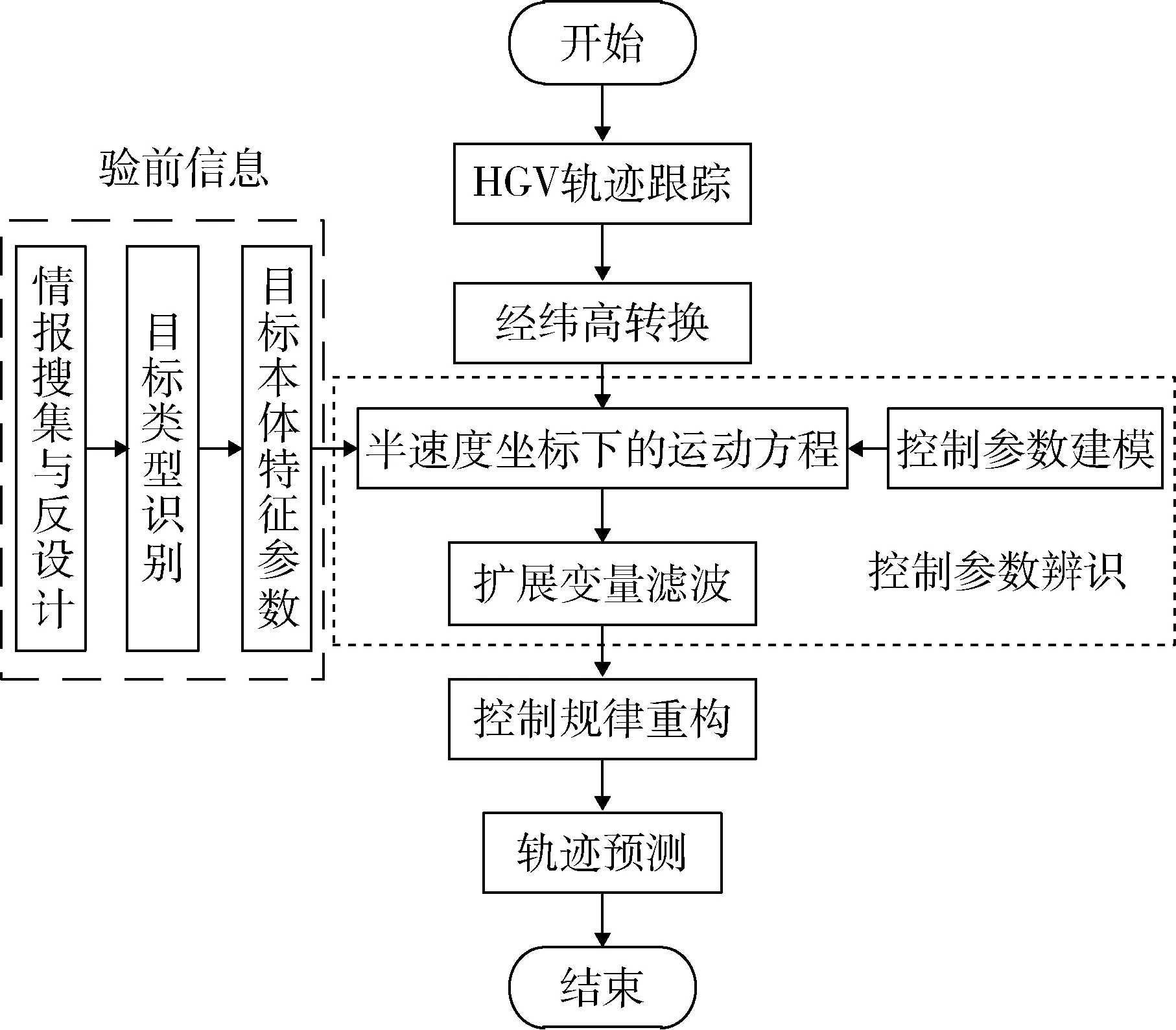
圖1 基于典型控制規律的軌跡預測流程圖Fig.1 Flow chart of trajectory prediction based on typical control law
圖1中首先是利用地面雷達對HGV進行軌跡跟蹤,將位置的跟蹤結果轉換成經緯高形式。對典型控制規律下的控制參數進行建模,將其擴展到半速度坐標系下HGV運動方程的狀態變量中,并對擴展變量進行濾波,進而辨識控制參數。然后對控制規律進行重構,得到控制參數的具體規律,最后對軌跡進行預測。圖1中虛橫線區域表示驗前信息,表示工作要在跟蹤預測前完成,是采用該預測方法的前提,在本文中假設該部分已經完成。圖1中虛點線區域表示控制參數辨識部分,是軌跡預測方法的關鍵。
4 仿真校驗
為了驗證不同軌跡及不同控制參數輸入條件下的軌跡預測效果,本文基于CAV-H的數據設計了2條典型的HGV軌跡。一條是跳躍軌跡,僅受攻角控制生成,傾側角為0,攻角為速度的分段線性連續函數;另一條是非跳躍軌跡,由攻角和傾側角聯合控制生成,攻角變化規律與跳躍軌跡相同,并設計了滿足過程和端點約束的D- v的飛行剖面。HGV跟蹤D- v剖面飛行,傾側角大小由D- v剖面確定,其符號翻轉由方位角誤差走廊控制。
設地面雷達距離觀測噪聲的標準差為10m,角度觀測噪聲的標準差為10-3rad。飛行器跟蹤采用基于氣動參數的擴展卡爾曼濾波(extendeddKalmanfilter,EKF)跟蹤算法[3,15],并將跟蹤結果作為控制參數辨識的觀測量。
4.1 跳躍軌跡預測
地面雷達的緯度和經度坐標為(1.5°,38°),設計的HGV跳躍軌跡及通過地面部署的雷達可觀測的軌跡弧段如圖2所示。
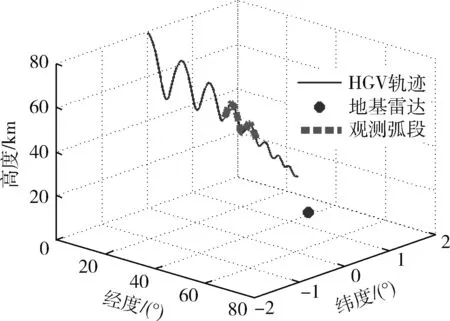
圖2 跳躍軌跡及可觀測弧段Fig.2 Skipping trajectory and observable arc segment
取過程噪聲的協方差陣為Qk=diag(10-16,10-16,10-16,10-16,10-16,10-16,10-10,10-10)。圖3,4給出了控制參數辨識濾波后的結果。從圖3可看出,前期攻角辨識的誤差接近于2o,后期攻角辨識的誤差小于0.5o;圖4表明傾側角辨識的精度較高,基本接近于0。一般條件下,在飛行過程中,若有傾側角參與控制,其值不會接近于0,所以軌跡預測過程中可認為傾側角為0。
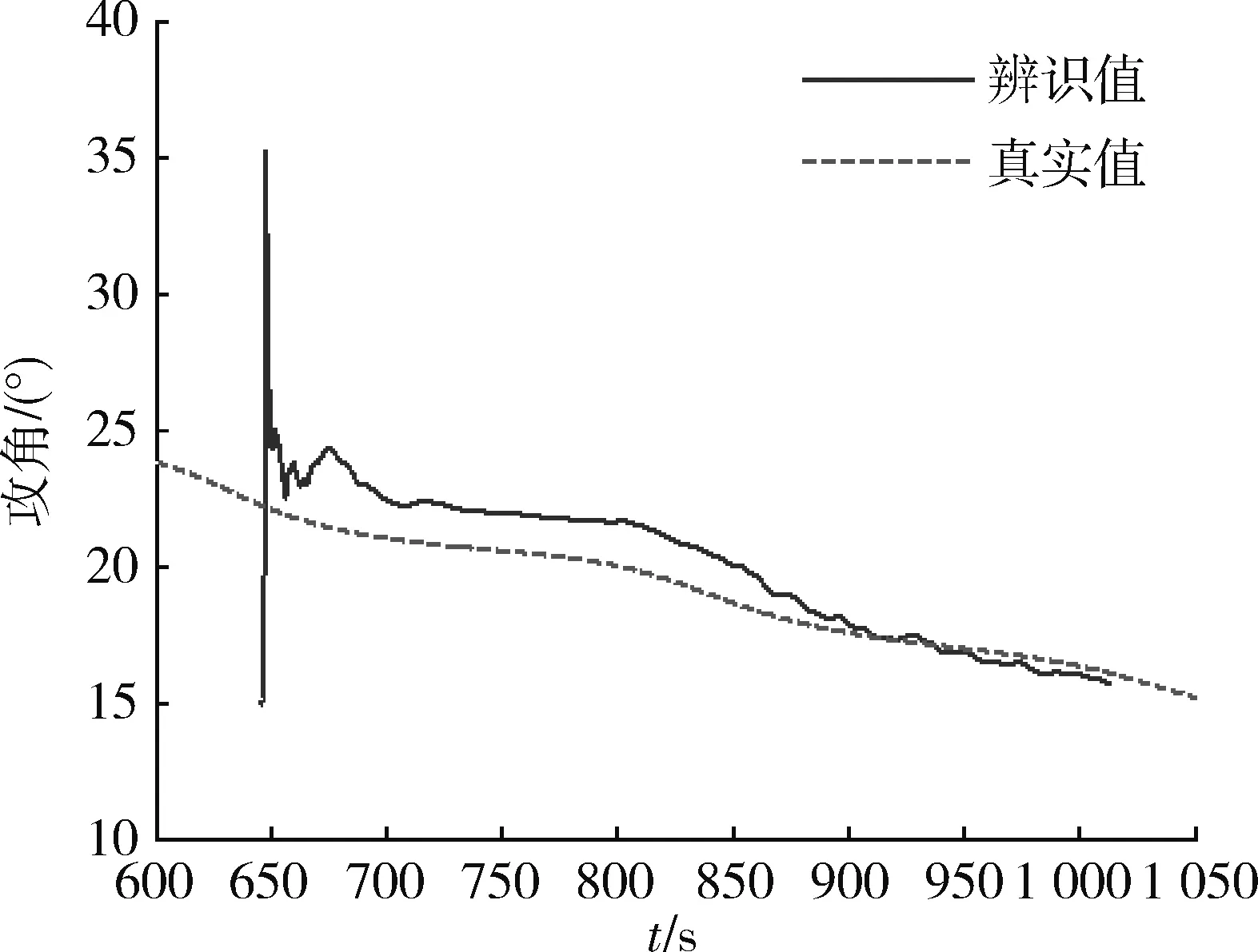
圖3 跳躍軌跡攻角辨識結果Fig.3 Angle of attack identification result of skipping trajectory
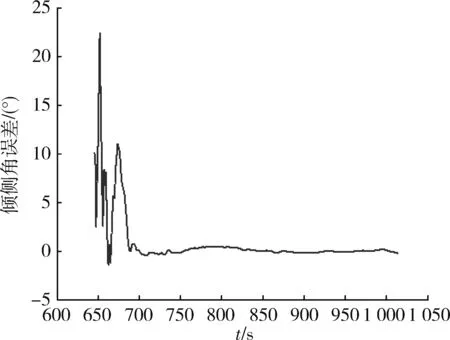
圖4 跳躍軌跡傾側角辨識誤差Fig.4 Angle of bank identification error of skipping trajectory
在軌跡預測過程中,指定1 000s為預測起始時刻。考慮到辨識濾波的收斂時間,選取700~1 000s內(辨識濾波穩定后)的辨識結果對攻角和傾側角進行重構。認為攻角是時間的線性函數,傾側角則認為是0。根據重構后的攻角表達式對1 000s后的攻角進行預測,攻角的預測結果如圖5所示,可看出攻角的預測精度優于1°。以1 000s處HGV狀態變量的濾波值為預測初值,在預測的攻角作用下進行軌跡遞推預測,由此得到的HGV軌跡預測結果如圖6所示,其中預測精度在km量級,可滿足后續任務的需要。
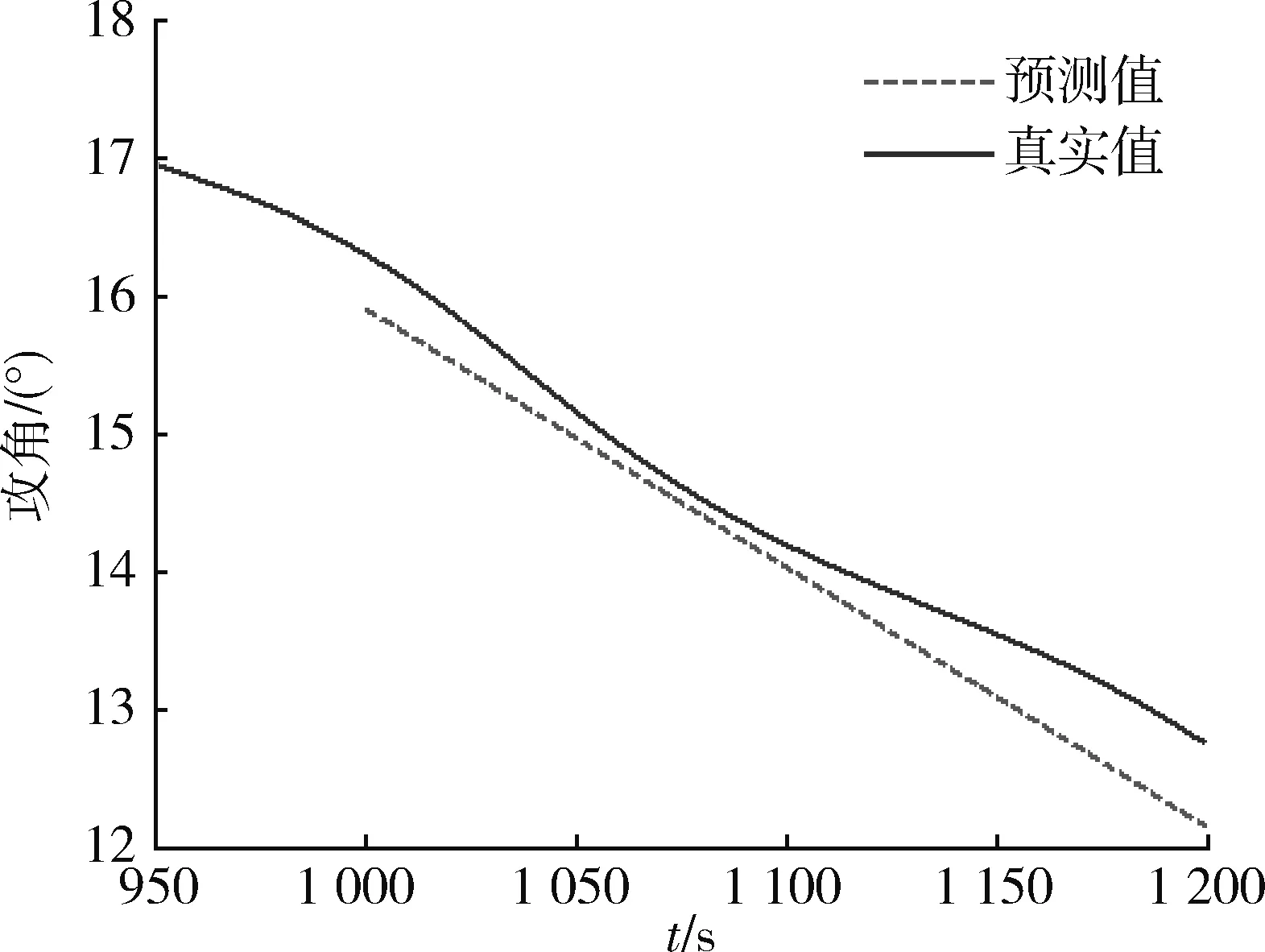
圖5 跳躍軌跡攻角預測結果Fig.5 Angle of attack prediction result of skipping trajectory
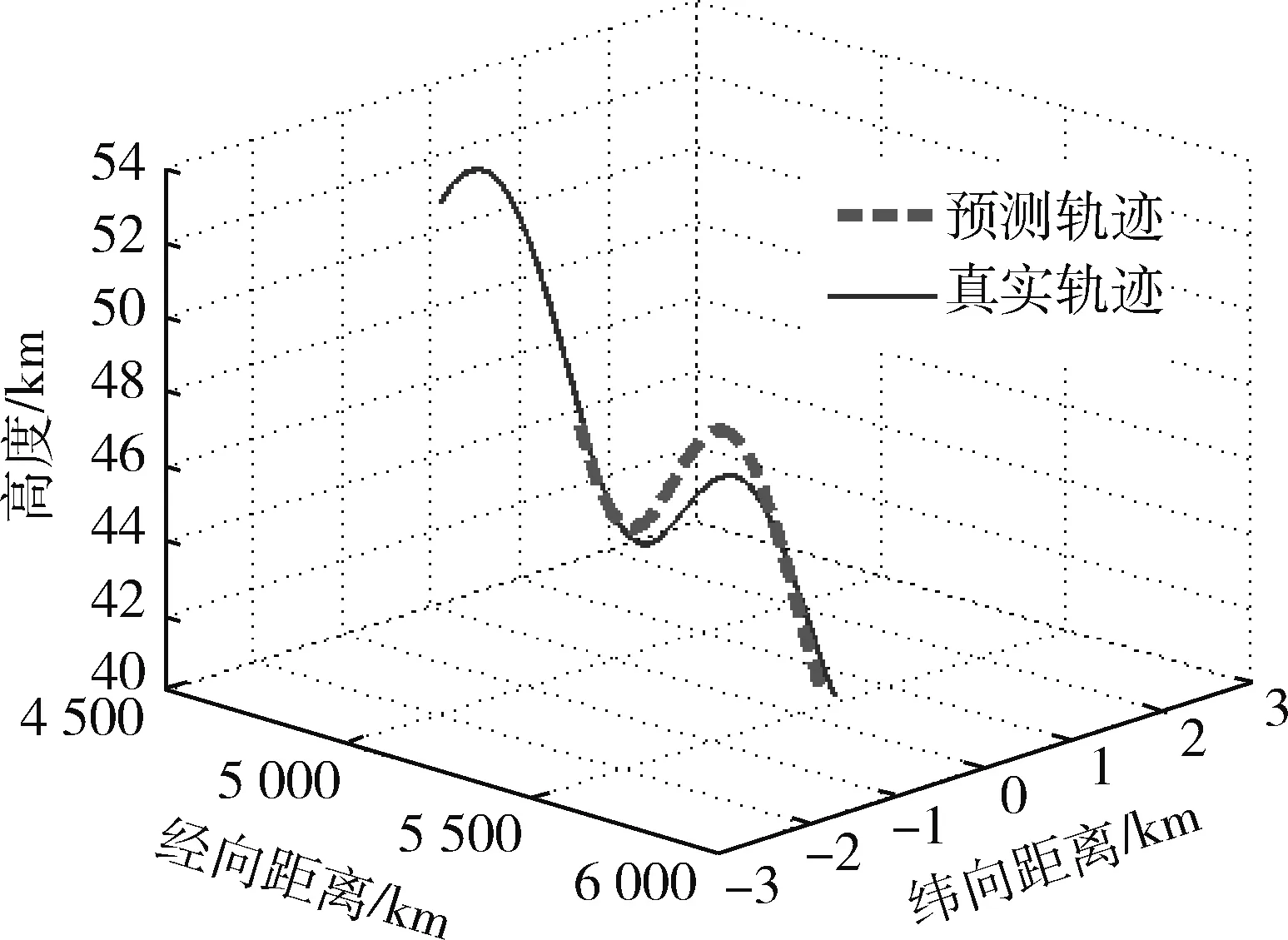
圖6 跳躍軌跡預測結果Fig.6 Prediction result of skipping trajectory
4.2 非跳躍軌跡預測
地面雷達的緯度和經度坐標為(2°,45°),設計的HGV非跳躍軌跡及通過地面部署的雷達可觀測的軌跡弧段如圖7所示。
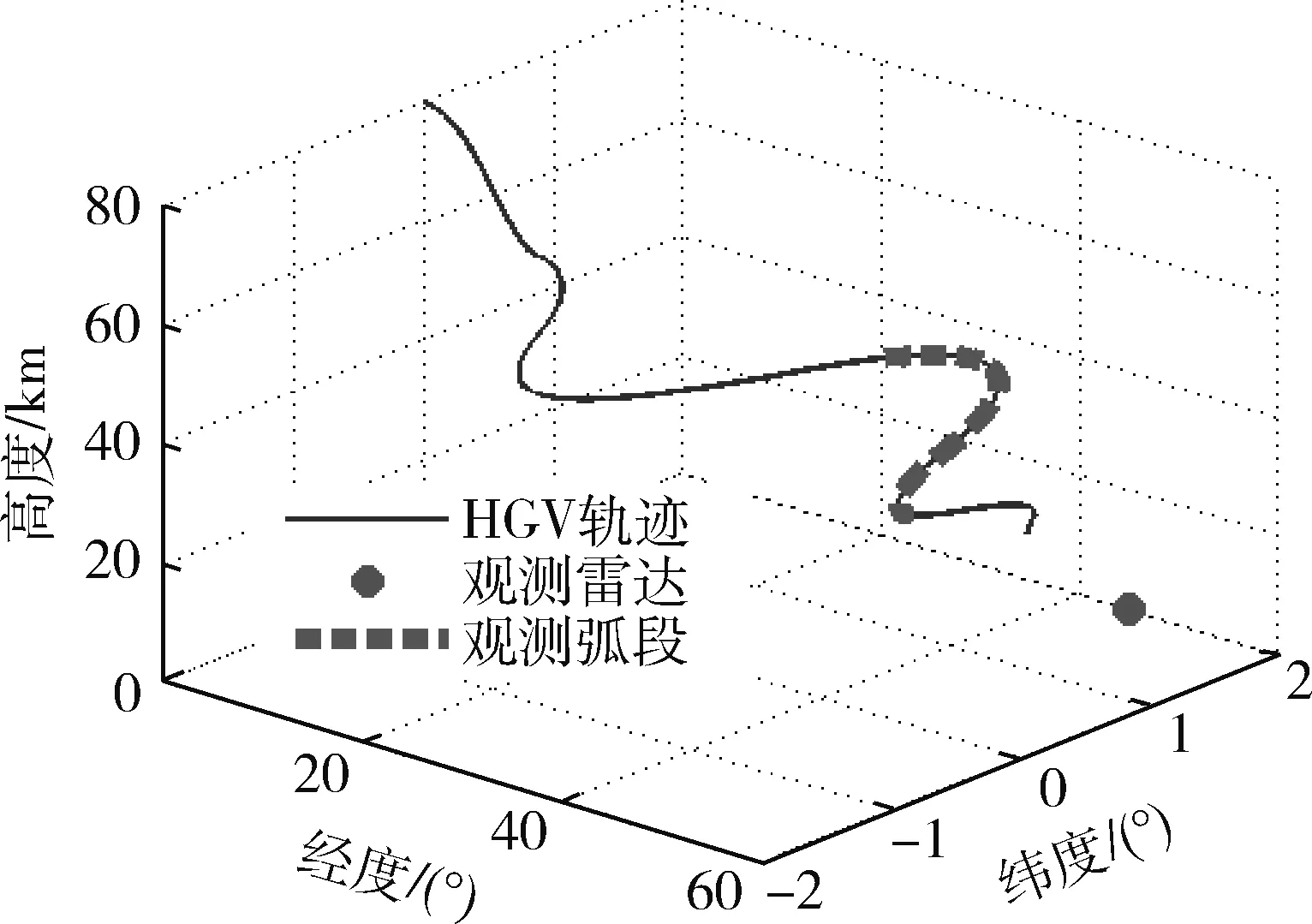
圖7 非跳躍軌跡及可觀測弧段Fig.7 No- skipping trajectory and observable arc segment

圖8 非跳躍軌跡攻角辨識結果Fig.8 Angle of attack identification result of no- skipping trajectory
取過程噪聲的協方差陣為Qk=diag(10-12,10-10,10-10,10-10,10-10,10-10,10-8,10-18)。圖8,9給出了控制參數辨識濾波后的結果。從2圖中可看出,與真實值相比,辨識值能夠表征真實值的變化規律,精度較高。
在軌跡預測過程中,指定900s為預測起始時刻。選取800~900s內(辨識濾波穩定后)的辨識結果對攻角和傾側角進行重構,認為攻角和傾側角均是時間的線性函數。根據重構后的控制參數表達式對900s后的控制參數值進行預測,攻角和傾側角的預測結果分別如圖10,11所示。這里假設已知HGV飛行后期是以最大升阻比攻角進行飛行,因此當預測攻角小于11°(最大升阻比攻角)時,將其截斷為11°。由于該方法無法預知傾側角的翻轉時刻,因此預測的傾側角在其翻轉后誤差較大。
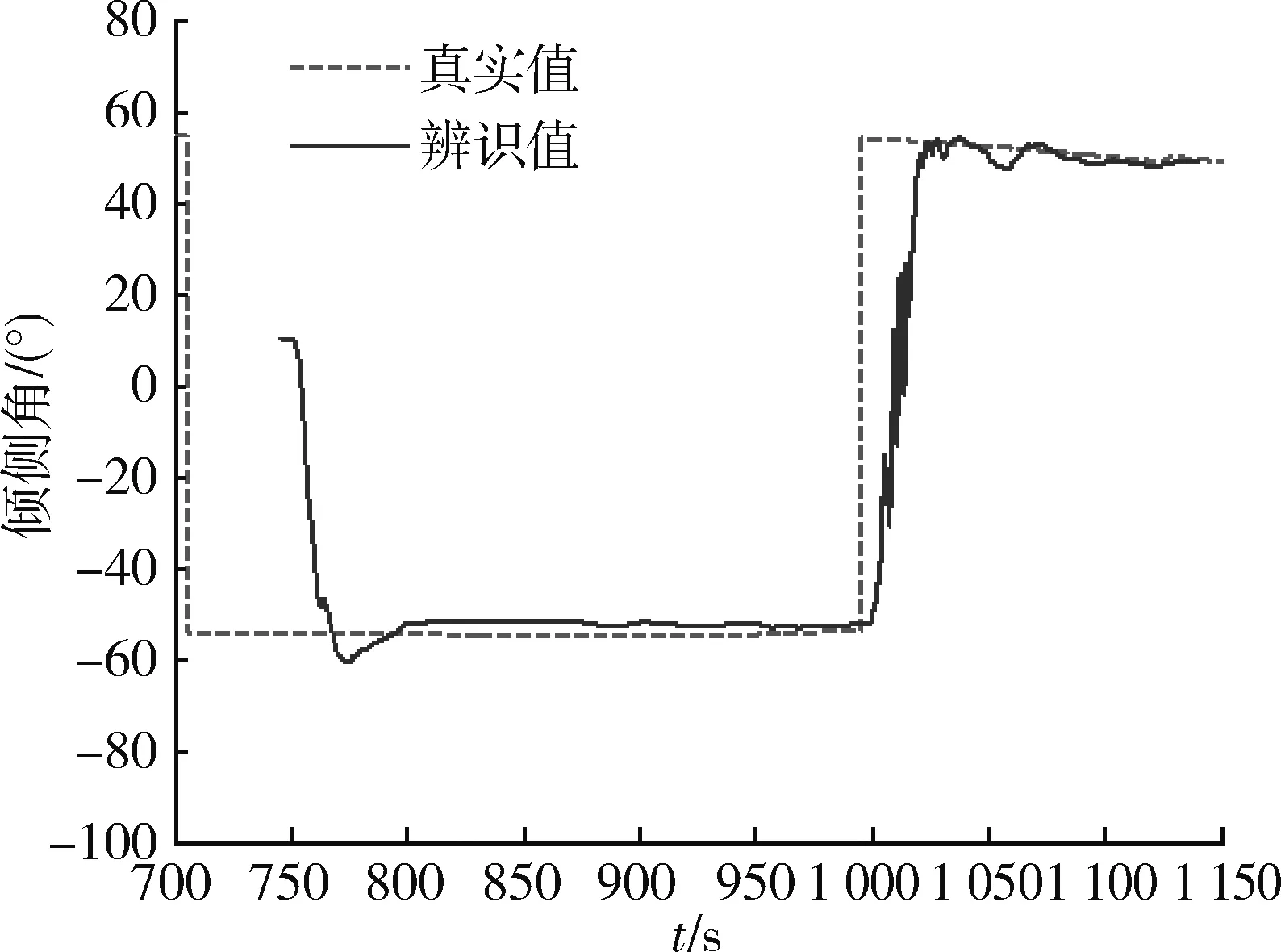
圖9 非跳躍軌跡傾側角辨識結果Fig.9 Angle of bank identification result of no- skipping trajectory
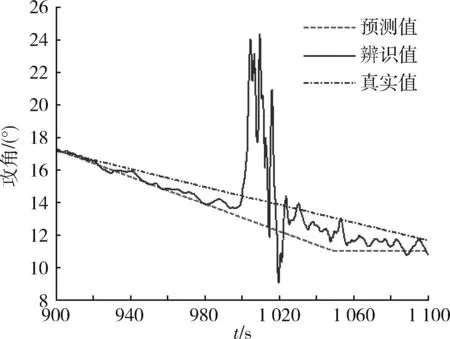
圖10 非跳躍軌跡攻角預測結果Fig.10 Angle of attack prediction result of no- skipping trajectory
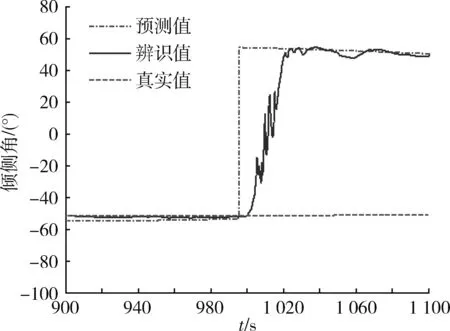
圖11 非跳躍軌跡傾側角預測結果Fig.11 Angle of bank prediction result of no- skipping trajectory
以900s處HGV狀態變量的濾波值為預測初值,在預測的攻角和傾側角作用下進行軌跡遞推預測,由此得到的HGV軌跡預測結果如圖12所示。可以看出,在傾側角翻轉點前預測的軌跡幾乎與真實軌跡重合。由于該方法無法預知傾側角的翻轉時刻,在真實傾側角翻轉后,而軌跡預測中仍按照重構得到的傾側角對HGV的軌跡進行預測,因此預測的軌跡在傾側角翻轉后與HGV真實軌跡相差甚遠。
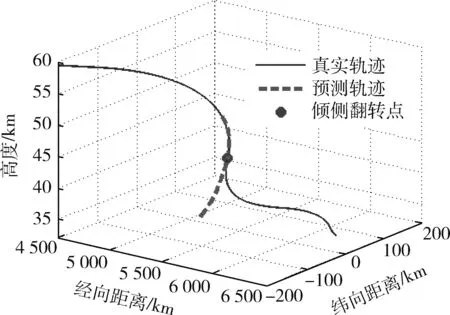
圖12 非跳躍軌跡預測結果Fig.12 Prediction result of no- skipping trajectory
5 結束語
針對高超聲速滑翔飛行器滑翔段的軌跡預測問題,本文提出了一種基于典型控制規律的高超聲速滑翔飛行器軌跡預測方法。該方法利用前期地面雷達跟蹤濾波的結果作為控制參數辨識濾波的觀測量來辨識控制參數的變化規律,并對其進行重構,進而進行軌跡預測。通過預測跳躍軌跡和非跳躍軌跡的仿真,驗證了本方法對傾側角不翻轉的情況具有良好的軌跡預測精度。當真實軌跡中存在傾側角翻轉時,由于本方法目前還無法預知其翻轉時刻,導致翻轉后的軌跡預測精度較差,具有一定的局限性,有待在后續的研究工作中加以改進與完善。
[1] 謝愈.復雜約束條件下高超聲速滑翔飛行器彈道規劃方法研究[D].長沙:國防科技大學,2012.XIEYu.StudyofTrajectoryPlanningApproachwithComplicatedConstraintsforHypersonicGlideVehicles[D].Changsha:NationalUniversityofDefenseTechnology,2012.
[2] 梁曉庚,田宏亮.臨近空間高超聲速飛行器發展現狀及其防御問題分析[J].航空兵器,2016(4):3-10.LIANGXiao-geng,TIANHong-liang.AnalysisoftheDevelopmentStatusandtheDefenseProblemofNearSpaceHypersonicVehicle[J].AeroWeaponry,2016(4):3-10.
[3] 李廣華.高超聲速滑翔飛行器運動特性分析及彈道跟蹤預報方法研究[D].長沙:國防科技大學,2016.LIGuang-hua.MotionCharacteristicsAnalysisandTrajectoryPredictionforHypersonicGlideVehicles[D].Changsha:NationalUniversityofDefenseTechnology,2016.
[4] 張洪波,謝愈,陳克俊,等.非慣性運動目標彈道預報技術探討[J].現代防御技術,2011,39(6):26-31.ZHANGHong-bo,XIEYu,CHENKe-jun,etal.InvestigationonTrajectoryPredictionofManeuverableTarget[J].ModernDefenceTechnology,2011,39(6):26-31.
[5] 韓春耀,熊家軍.高超聲速飛行器彈道預測方法研究[J].飛航導彈,2016(2):24-27.HANChun-yao,XIONGJia-jun.ResearchontheTrajectoryPredictionMethodforHypersonicVehicles[J].AerodynamicMissileJournal,2016(2):24-27.
[6] 秦雷,李君龍,周荻.臨近空間非彈道式目標HTV- 2跟蹤濾波與預報問題[J].航天控制,2015,33(2):56-61.QINLei,LIJun-long,ZHOUDi.TheProblemsofTrackingFilterandPredictionforNon-BallisticTargetHTV- 2intheNearSpace[J].AerospaceControl,2015,33(2):56-61.
[7] 王路,邢清華,毛藝帆.助推-滑翔無動力跳躍飛行器軌跡預測[J].空軍工程大學學報,2015,16(1):24-27.WANGLu,XINGQing-hua,MAOYi-fan.ATrackForecastingAlgorithmofBoost-GlideUnpropulsiveSkippingVehicle[J].JournalofAirForceEngineeringUniversity,2015,16(1):24-27.
[8] 王路,邢清華,毛藝帆.基于升阻比變化規律的再入高超聲速滑翔飛行器軌跡預測算法[J].系統工程與電子技術,2015,37(10):2335-2340.
WANG Lu,XING Qing- hua,MAO Yi- fan.Trajectory Prediction of Reentry Hypersonic Glide Vehicle Based on Changing Rule of Lift- Drag Ratios[J].Systems Engineering and Electronics,2015,37(10):2335-2340.
[9] 魏喜慶,王社陽,李瑞康.基于自適應IMM算法的高超聲速飛行器軌跡預測[J].上海航天,2016,33(2):27-31. WEI Xi- qing,WANG She- yang,LI Rui- kang.Trajectory Predicting of Hypersonic Vehicle Using Adaptive Interactive Multiple Model Filter[J].Aerospace Shanghai,2016,33(2):27-31.
[10] 楊彬,賀正洪.一種GRNN神經網絡的高超聲速飛行器軌跡預測方法[J].計算機應用與軟件,2015,32(7):239-243. YANG Bin,HE Zheng- hong.Hypersonic Vehicle Track Prediction Based on GRNN[J].Computer Applications and Software,2015,32(7):239-243.
[11] 呼衛軍,周軍.臨近空間飛行器攔截策略與攔截武器能力分析[J].現代防御技術,2012,40(1):11-15. HU Wei- jun,ZHOU Jun.Analysis of the Interception Strategy of the Near Space Vehicle and Capability of the Interception Weapon[J].Modern Defence Technology,2012,40(1):11-15.
[12] 崔乃剛,盧寶剛,傅瑜,等.基于卡爾曼濾波的再入飛行器氣動參數辨識[J].中國慣性技術學報,2014,22(6):755-758. CUI Nai- gang,LU Bao- gang,FU Yu,et al.Aerodynamic Parameter Identification of a Reentry Vehicle Based on Kalman Filter Method[J].Journal of Chinese Inertial Technology,2014,22(6):755-758.
[13] 趙漢元.飛行器再入動力學與制導[M].長沙:國防科技大學出版社,1997. ZHAO Han- yuan.Dynamics and Guidance for Flight Vehicle Entry[M].Changsha:National University of Defense Technology Press,1997.
[14] SIMON D.最優狀態估計—卡爾曼,H∞及非線性濾波[M].張勇剛,李寧,奔粵陽,等,譯.北京:國防工業出版社,2015. SIMON D.Optimal State Estimation:Kalman,H∞,and Nonlinear Approaches[M].ZHANG Yong- gang,LI Ning,BEN Yue- yang,et al,Translated.Beijing:National Defense Industry Press,2015.
[15] 夏佩倫.目標跟蹤與信息融合[M].北京:國防工業出版社,2010. XIA Pei- lun.Target Tracking and Information Fusion[M].Beijing:National Defense Industry Press,2010.
Trajectory Prediction of Glide Vehicle Based on Typical Control Law
ZHANG Hong- bo1,HUANG Jing- shuai1,LI Guang- hua2,TANG Guo- jian1
(1.National University of Defense Technology,College of Aerospace and Engineering,Hunan Changsha 410073,China; 2.Air Force Aviation University,Flight Vehicle and Dynamic Department,Jilin Changchun 130022,China)
Aiming at the features of high maneuverability and trajectory flexibility, a trajectory prediction method for hypersonic glide vehicle (HGV) is proposed based on the typical control law. On the foundation of the priori information, the control parameters- angles of attack and bank are considered as the first order Gauss- Markov process. The extended state variables are constructed by means of combining with the kinematic differential equations of HGV described in the half- speed coordinate system. The filtering results of HGV position tracking after the longitude- latitude- altitude transformation and velocity are chosen as the measurements, and the unscented Kalman filter (UKF) is used to identify the control parameters. According to the identified values, the constructed control law can be obtained and the HGV trajectory can be predicted. The results of simulating and analyzing the two typical flight trajectories of skipping and no- skipping demonstrate that the proposed method can acquire the satisfactory prediction accuracy at the absence of the turnover of bank angle.
hypersonic glide vehicle (HGV); typical control law; Gauss- Markov process; parameter identification; unscented Kalman filter (UKF); trajectory prediction
2016-10-20;
2017-02-14 作者簡介:張洪波(1981-),男,山東濟陽人。副教授,博士,主要從事飛行器動力學與控制方面的研究工作。
10.3969/j.issn.1009- 086x.2017.04.018
V412.4
A
1009- 086X(2017)- 04- 0112- 07
通信地址:410073 湖南省長沙市國防科技大學航天科學與工程學院 E- mail:zhanghb1304@nudt.edu.cn
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
