倒裝設備鍵合頭旋轉補償算法研究
2017-09-03 02:52:38張克佳
電子工業專用設備 2017年4期
關鍵詞:系統
張克佳,袁 丁
(北京中電科電子裝備有限公司,北京 100176)
倒裝設備鍵合頭旋轉補償算法研究
張克佳,袁 丁
(北京中電科電子裝備有限公司,北京 100176)
鍵合頭是工作過程中與芯片直接接觸的關鍵零部件,其定位精度與速度決定了設備整體性能,旋轉補償算法是用來補償鍵合頭旋轉軸偏心以及拾取芯片偏心時,校準角度后對裝貼芯片位置的影響,該算法在保證速度的同時,提高了精度。
倒裝設備;鍵合頭;旋轉補償算法
倒裝芯片鍵合技術是一種區別于傳統引線鍵合的封裝技術,它將芯片的工作面即制有凸點的電極面朝下,與基板布線層直接鍵合,減少了芯片在基板上占用的空間,使得基板上的鍵合芯片數向高密度方向發展。目前,該項技術幾乎被所有熱門的電子產品采用,如無線局域網絡天線、系統封裝、多芯片模塊、圖像傳感器、微處理器、硬盤驅動器、醫用傳感器以及無線射頻識別等。
1 倒裝鍵合系統精度分析
隨著芯片尺寸的不斷減小,芯片與基板鍵合過程中的鍵合定位精度將直接影響鍵合質量。因此,倒裝鍵合設備的鍵合精度是衡量設備性能的重要指標,也是影響芯片鍵合質量的重要因素之一。
倒裝鍵合系統主要由機器視覺系統、運動系統、測力系統、控制軟件等組成。鍵合頭具備X、Y、Z軸以及旋轉T軸,通過控制軟件與軸的配合來完成吸片,然后通過機器視覺系統對準,再完成鍵合。
理想情況下,在校正芯片角度時,鍵合頭的吸嘴中心與其旋轉軸心完全重合,這時鍵合頭旋轉任意角度都不會引起吸嘴中心位置的變化;實際上,吸嘴是通過機械定位安裝在鍵合頭上的,而且鍵合頭旋轉軸也有設計安裝誤差。因此,鍵合頭旋轉時會偏心引起吸嘴中心的位置變化,這就意味著芯片的中心也會隨之變化,從而鍵合精度變差。
如果對準時先通過視覺系統識別出芯片的角度,讓旋轉向轉正后再識別芯片位置,就能解決鍵合頭偏心旋轉的問題,但是這樣會極大地影響鍵合速度,所以本文將采用一種旋轉補償算法來解決該問題(見圖1所示)。

圖1 鍵合頭偏心旋轉校正示意圖
2 鍵合頭旋轉補償算法
旋轉補償算法用來補償鍵合頭旋轉軸偏心以及拾取芯片偏心時,校準角度后對裝貼芯片位置的影響。首先選取基準位置,鍵合頭旋轉向在零位,x、y向電機運動到相機的上方,吸嘴位于視覺圖像的中心位置,取圖像中心為坐標原點,建立坐標系(見圖2所示)。
吸嘴圍繞旋轉軸心A(xA,yA)的軌跡可以近似為一個圓,吸嘴環繞A的旋轉方程為:
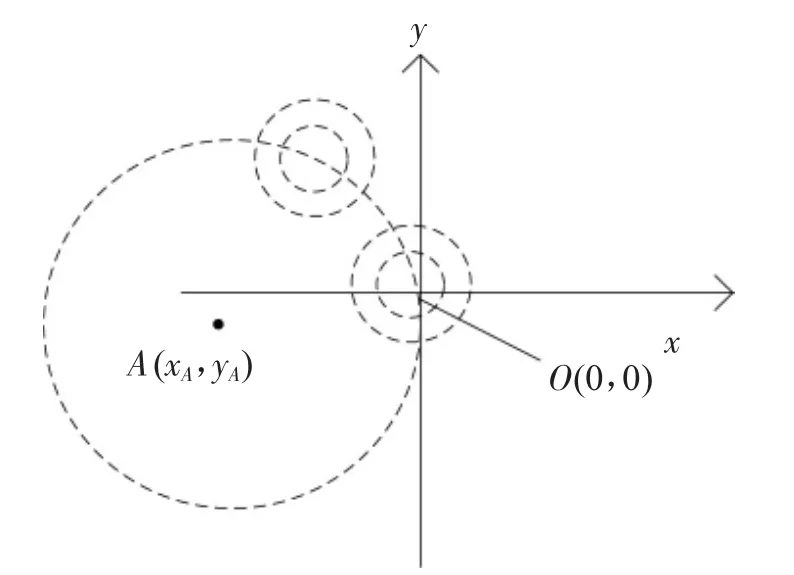
圖2 旋轉算法坐標系建立

其中,R為旋轉軸心到吸嘴中心的半徑;θ1為吸嘴在零位時,吸嘴中心與軸心A的夾角,α為吸嘴旋轉角度θ后與軸心A的夾角,則他們的角度關系為:

其中:

當旋轉向電機旋轉校正芯片角度偏移時,芯片的中心軌跡是以吸嘴中心為圓心的圓,如圖3所示,則芯片的中心軌跡方程為:
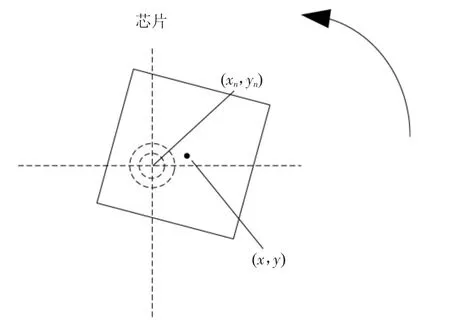
圖3 校正芯片示意圖
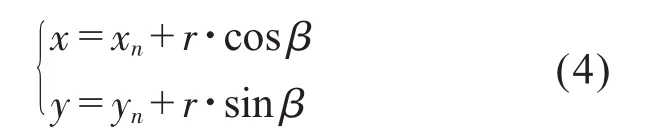
其中,θ2為芯片中心與坐標軸X的夾角,β為芯片旋轉了θ角度后,與坐標軸X的夾角。則他們的角度關系為:

C(xdc,ydc)為芯片旋轉前的中心位置:

芯片中心到吸嘴中心的距離:

由式(1)、(4)可得當吸嘴旋轉θ后,芯片中心位置方程為:

再代入式(2)、(5)、(6)可得:
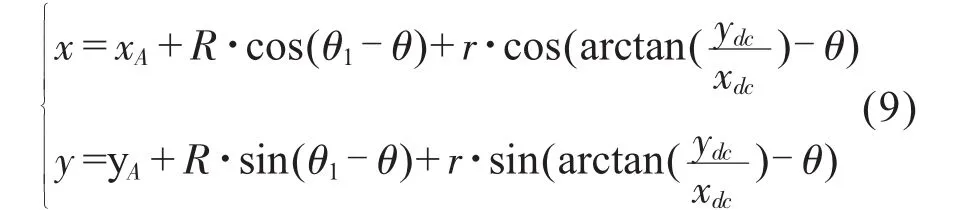
則實際偏移的補償值為:

由式9可知,計算補償值首先需要得到吸嘴的旋轉軸心坐標以及旋轉半徑R。芯片的中心位置和偏移角度由視覺系統識別后帶入參與計算。
3 鍵合頭旋轉軸心的確定
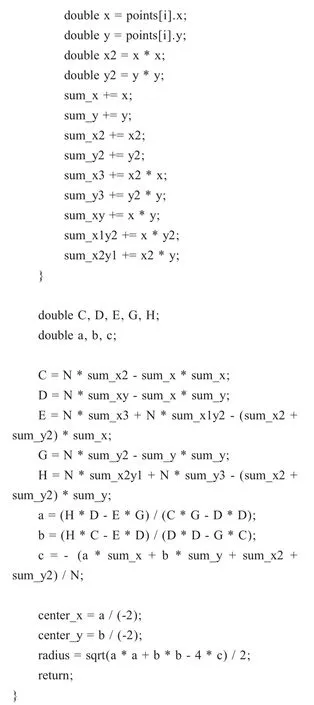
最小二乘法(least squares analysis)是一種數學優化技術,它通過最小化誤差的平方和找到一組數據的最佳函數匹配。最小二乘法是用最簡的方法求得一些絕對不可知的真值,而令誤差平方之和為最小。這里用此方法擬合圓曲線來確定旋轉軸心位置和半徑。
鍵合頭在回零位置時,吸嘴上吸取標定板,使用視覺系統識別。每次轉動一個角度,識別后,將芯片中心點坐標代入向量vector
4 結束語
本文將鍵合頭的旋轉軸心近似成圓,利用最小二乘法求出圓心。使用視覺系統對拾取的芯片進行一次定位,通過旋轉算法計算出校正角度后芯片x和y兩個方向的偏移,從而完成高速高精度裝貼。
[1] 李建平,劉濤,鄒中升.熱超聲倒裝鍵合機的視覺系統定位精度實驗研究[J].電子技術與應用,2008,34 (10):146-150.
[2] 芮延年,劉開強,張志偉,等.Flip-chip芯片關鍵技術的研究[J].蘇州大學學報(工科版),2004,24(5):19-22.
Research on Rotation Compensation Algorithm of Flip-chip Bonding Head
ZHANG Kejia,YUAN Ding
(CETC Beijing Electronic Equipment Co.,Ltd,Beijing 100176,China)
The bonding head is the key component which is in direct contact with the chip during operation.Its positioning accuracy and speed determine the overall performance of the equipment.The rotation compensation algorithm used in this paper is used to compensate the eccentricity of the rotary shaft of the bonding head and the effect of the calibration angle on the position of the chip when the chip is eccentric.The algorithm improves the accuracy while ensuring the speed.
Flip-chip;Bonding head;Rotation compensation algorithm
TN605
B
1004-4507(2017)04-0017-04
張克佳(1987-)男,陜西西安人,研究生學歷,助理工程師,主要從事半導體封裝設備軟件設計。
2017-06-01
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32