DSP多處理器的實時數據共享三余度伺服系統余度管理
2017-09-03 09:22:46邸彩蕓李明星喬森陳金輝陳世坤
單片機與嵌入式系統應用 2017年8期
邸彩蕓,李明星,喬森,陳金輝,陳世坤
(1.國網冀北電力有限公司 技能培訓中心,保定 071051;2.北京精密機電控制設備研究所)
DSP多處理器的實時數據共享三余度伺服系統余度管理
邸彩蕓1,李明星1,喬森2,陳金輝1,陳世坤1
(1.國網冀北電力有限公司 技能培訓中心,保定 071051;2.北京精密機電控制設備研究所)
基于TI公司DSP芯片 TMS320F28335 設計了一種多處理器實時數據共享三余度伺服系統,首先搭建了基于McBSP 通信總線的子控制器兩兩交互通信平臺,實現了三余度伺服系統數據共享和信息交互,接著提出了雙交互比電流均衡法,實現了三通道間的電流均衡嚴格同步,解決了余度伺服系統力矩紛爭的技術難題,最后重點攻克了控制律用信號表決余度管理,實現三余度伺服故障監測及隔離、余度降級故障平滑切換的技術難題,使伺服系統的實時性和可靠性得到最大程度的提高。
三余度伺服系統;TMS320F28335;多處理器實時數據共享;余度管理
引 言
提高可靠性一般有2種途徑:①提高降額設計的裕度;②關鍵環節進行余度設計。前者以體積和重量為代價,后者通過一些余度措施達到體積重量增加不多、可靠性大幅度提高的目的,是航空航天飛行器經常采用的辦法。本文基于TI公司最先進的電機控制專用 DSP芯片 TMS320F28335設計了一種多處理器實時數據共享三余度伺服系統。
1 三余度伺服系統
除機械作動部件由于受安裝接口限制不進行冗余外,A/D、DSP、驅動器、伺服電機、電位計等部件均采用三冗余設計。其中DSP選用高速數字處理器TMS320F28335,是伺服系統的控制中樞,負責對控制系統指令和伺服機構運動位移的采集,按照一定控制律實現伺服機構的高動態控制,同時DSP也是進行余度控制和管理的大腦。三路指令分別通過1553B總線站點傳遞給每個通道的 DSP后,DSP根據使用多數表決算法,對總線上的三個指令和A/D采集到的三個反饋進行表決,DSP再將指令和反饋相減,按照一定的控制策略輸出交流永磁同步電機的控制量給電機驅動器,電機驅動器再按照矢量變換的方法驅動電機轉動,三路電機的轉動通過齒輪組將運動合成到滾珠絲杠,最終安裝在滾珠絲杠上的作動桿推動發動機運動。
控制驅動器主要由控制電路模塊和以IPM模塊為核心的驅動電路模塊兩大部分組成。控制模塊選用TI公司電機控制專用DSP處理器TMS320F28335,驅動模塊選用Mitsubishi公司PM150RL1B060,邏輯控制芯片選用Lattice公司的CPLD,外部數據存儲器選用256K×16位的SRAM,另外輔以電流、電壓、速度檢測和PWM 驅動等功能電路。
驅動電路模塊采用交-直-交電壓型主回路拓撲結構,為交流伺服電動機提供功率驅動,它包括電源電路、驅動電路、逆變電路、保護電路,且控制電源和驅動電源分別獨立供電,驅動電源使用繼電器進行軟啟動。采用光耦對PWM驅動信號進行強弱電隔離。
配套伺服電機則采用高比功率設計的3 kW中頻永磁同步電機。配套機電作動器采用直線一體式傳動機構方案,具有結構緊湊、傳動簡潔、傳動間隙小、裝配調試簡單等特點。機電作動器主要由永磁同步伺服電機、旋轉變壓器、滾珠絲杠、線位移傳感器以及前后連接支耳等組成。
2 多處理器實時數據共享平臺
本文中伺服控制器中每個通道內都采用電機控制器 DSP內外環控制結構,這3個控制器都具有余度管理的功能,它們是3個獨立的數字信號處理單元,三者之間采取的Mcbsp總線數字信號是兩兩通信形式,實現了多個處理器實時數據的共享,實現方法如圖1所示,這種“三角形”的兩兩通信結構正是三余度伺服系統同步、數據共享、信息交互以及余度管理的基礎,正是基于這種高效的數據通信模式,多余度控制器的各個子控制器之間才得以有效的協調作業,才能實現控制律用信號的信號表決研究、電流均衡嚴格同步、故障監測及隔離、余度降級故障平滑切換等關鍵性技術。
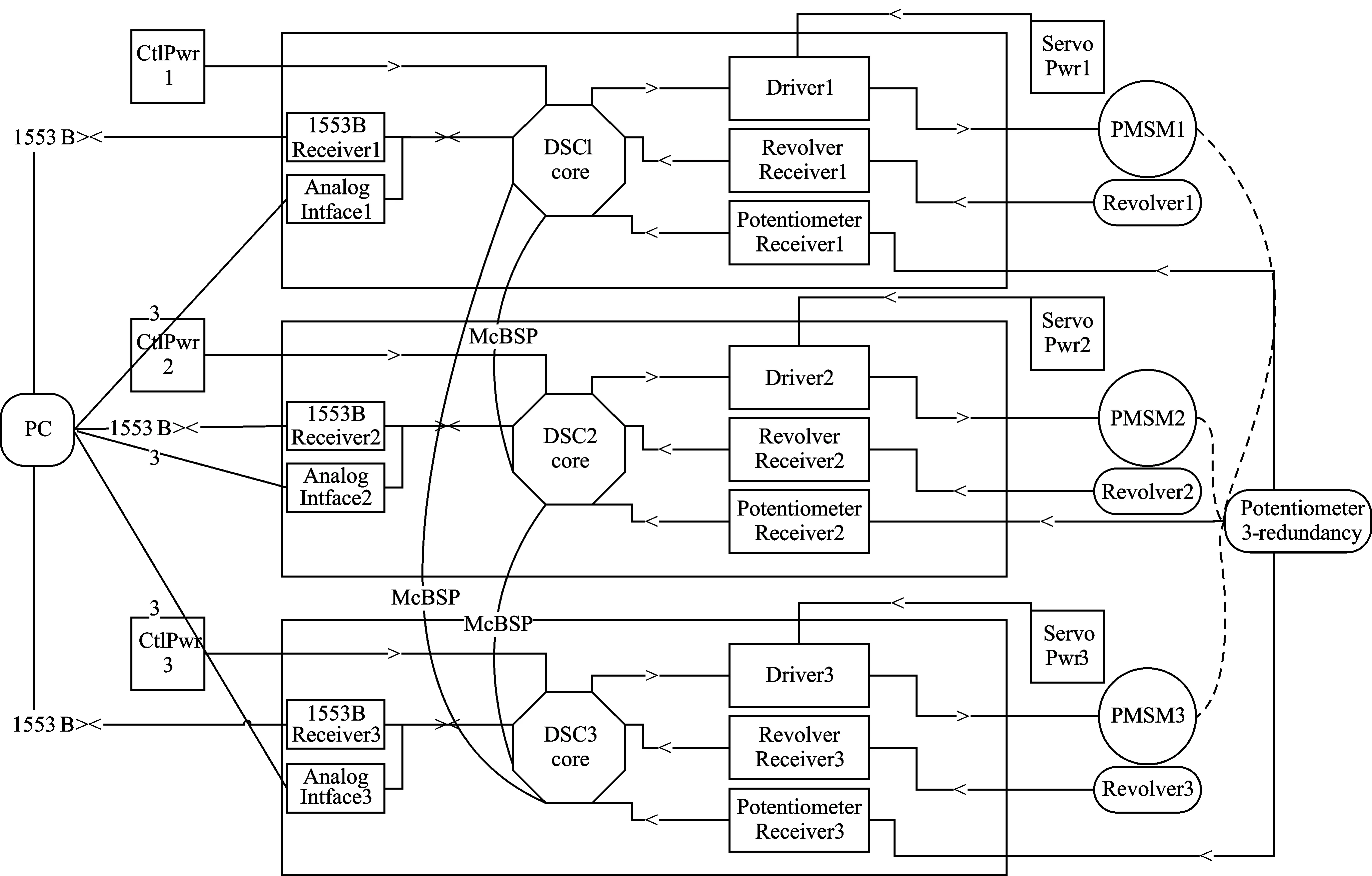
圖1 多處理器實時數據共享平臺
3 三余度伺服系統力矩紛爭
國內對于余度技術已有不少研究,但主要針對余度理論及系統故障診斷方面。伺服機構的冗余合成均通過剛性結構零件的合并統一(如齒輪),必然存在力矩紛爭,機電伺服力矩紛爭的問題也一直是航天伺服行業技術攻堅的難點。為了避免出現三子通道力矩紛爭問題,本文針對部件級余度技術,實現三子通道伺服電機電流均衡嚴格同步控制進行了重點研究。
三余度伺服系統由三臺子控制器組成且互為冗余,只有在三臺控制器同一鏈路完全失效時才無法工作。三個子控制器中嵌入的伺服控制軟件完全相同,所以下面僅以其中一個子控制器中的嵌入式伺服控制軟件為例進行軟件的設計。
三余度伺服系統嵌入式伺服控制軟件嵌入在三余度伺服系統的各個子控制器中,主要任務是實現各個子伺服控制器與控制系統之間的通信,接收并執行BC的總線指令,控制A/D轉換采集伺服系統數據,進行伺服系統的數字閉環控制及補償,向BC發送伺服系統狀態信息,且三個子控制器之間通過Mcbsp兩兩之間進行通信和數據交換,通過“三角形”通信結構組建成一個分布式數據交換和仲裁平臺,以此實現整個伺服系統和各個子控制器的狀態監測和余度管理控制的目的。
針對電流均衡,本文采用雙交叉互比法實現電流均衡,雙交叉互比法電流均衡是在電流環中實現的,vout1、vout2和vout3速度PI調節器的輸出首先作為輸入信號輸入到電流均衡器,讀取三通道伺服電機各自的轉矩電流反饋值iq1、iq2和iq3,然后判斷三者中的最大值、最小值和中值,然后求取最大值與中值間的誤差絕對值的差值εmax和最小值與中間值的誤差絕對值的差值εmin,考慮到電流為負反饋,所以對反饋電流大的通道的給定電流值上加εmax,對反饋電流小的通道的給定電流值減去εmin,即可實現電流均衡。電流閉環控制周期本軟件中為100 μs,實際電流值較小的通道,其反饋值比原來值減小εmin,電流閉環調節器將會使其電流向增大的方向調節,而對實際電流值較大的通道,反饋值比原來值增大εmax,電流閉環調節器將會使其電流向減小的方向調節,使得電流反饋值最大的和最小的通道都向中值方向調節,從而實現三通道伺服電機的電流均衡嚴格同步,進而避免了三伺服電機之間的力矩紛爭。
4 余度管理
能否及時準確地檢測出系統故障并對故障進行隔離是冗余系統設計的關鍵,本文除采取了比較監控、傳感器自監控外,還基于多處理器實時數據共享平臺提出了控制器雙向監控的通道內自監控方法。
三余度伺服系統的故障失效故障模式如表1所列,雖然構成伺服機構的零件及元件有幾百種,但是任意一個零件及元件的故障均最終體現在以下7種故障模式中,比如電機繞組斷裂,其對外表現就是電機停轉。
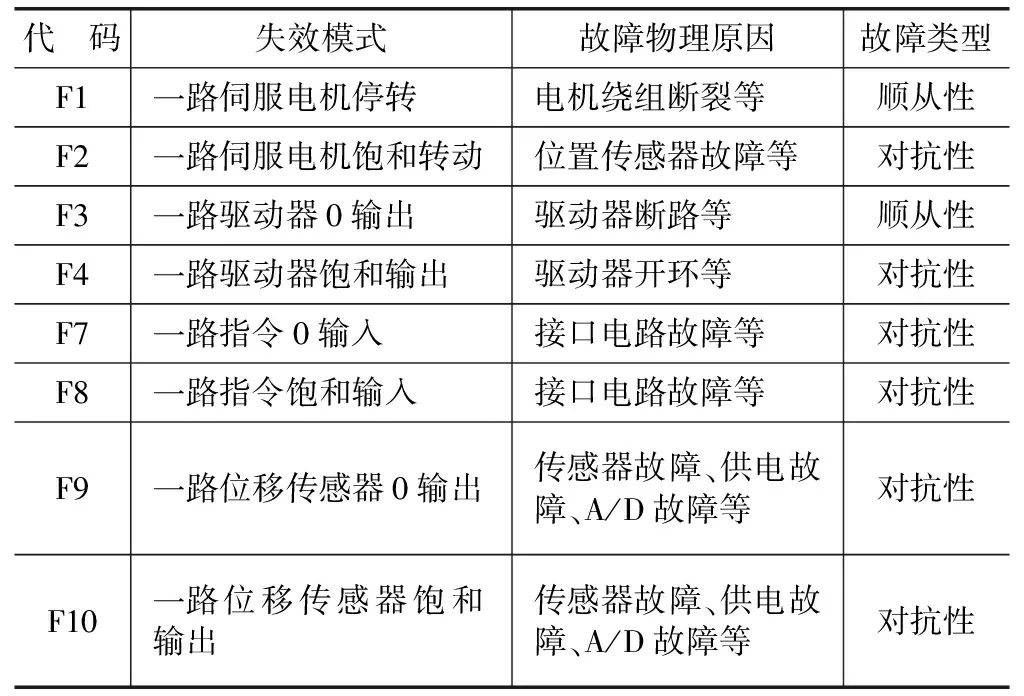
表1 失效故障模式
針對故障率較高的元器件中,反饋電位計、接口電路、A/D轉換器等故障(表現為指令和反饋信號故障)已采取表決的方式將故障吸收。控制器、驅動器和伺服電機的故障不易通過表決解決,采用監控和隔離的方式解決。
故障點的監測由該通道DSP單獨完成,信息共享,故障監測信息點如表2所列。
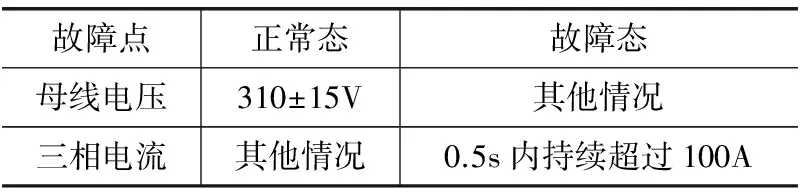
表2 故障監測點及故障域值
故障模式中,一路電機軸卡死、一路電機異常輸出、一路驅動器異常輸出、一路控制器異常輸出等對抗性故障模式,都可以導致驅動器電流異常增大;一路電機停轉、一路驅動器零輸出、一路控制器零輸出等順從性故障模式,都會導致驅動器零電流,監控面設置分析圖如圖2所示。因此,可監控驅動器電流,若某一通道電流異常增大,超過設定的門限值,則判定此路為瞬態故障,并通過多處理器實時共享平臺采用余度降級平滑切換技術,余度伺服機構在一度故障情況下仍能實現伺服機構的基本功能,能實現對信號的跟蹤,故障切換過程中無位移速度電流的畸變,進而實現三余度伺服系統的高可靠性。
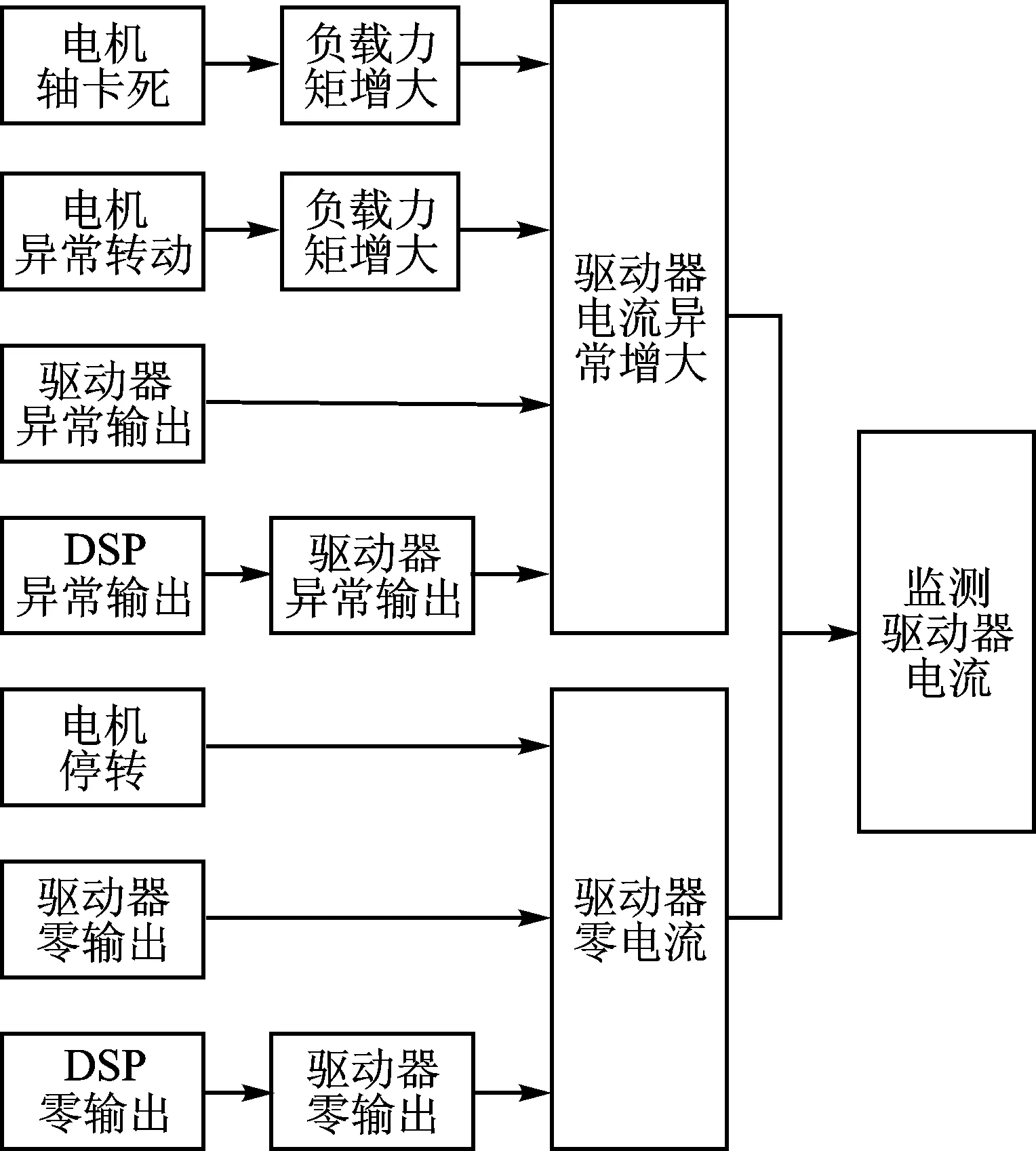
圖2 監控面設置分析圖
5 冗余故障實驗
系統一度故障主要包括兩類:信號級故障包括一路指令信號異常和一路反饋信號異常;控制級故障包括一路控制器、驅動器或電機的異常輸出。
其中,信號級故障通過表決解決,表決后可以吸收一度故障,系統與無故障狀態一致;控制級一度故障需要進行檢測和隔離,否則系統性能會大幅降低或無法運行,本文只列舉兩類典型的控制級一度故障試驗,包括順從性故障和對抗性故障。
順從性故障指該故障不阻礙無故障部分的正常工作,如一路伺服電機停轉;對抗性故障指該故障將阻礙無故障部分正常工作,伺服機構必須額外克服該故障才能輸出相應的運動,如一路控制器異常輸出。
5.1 順從性故障
由上位機編程設定位置指令信息,位置指令設定為不同頻率,幅值為30°的階躍信號,高低速切換運行,運行過程中注入故障指令進行驅動器PWM封鎖處理,模擬故障過程,同時三冗余驅動器實時反饋各自電機的電壓、電流、位移、速度信號,通過位置指令信號和采集的三通道電機的電壓、電流、位移、速度信號來判斷三余度系統順從性故障時各通道電機的位移、速度或電流是否有畸變。
要求三余度機電伺服機構在故障處理過程中運動平穩,不得有突跳等異常動作現象。
試驗結果如圖3所示,由圖3可知:由于兩臺電機的功率能滿足最大輸出,并且三余度控制器實時反饋各自的電壓、電流、位移、速度信號,因此在一度順從性故障情況下伺服機構在故障處理過程中運動平穩,沒有突跳等異常動作現象,系統繼續正常運行。
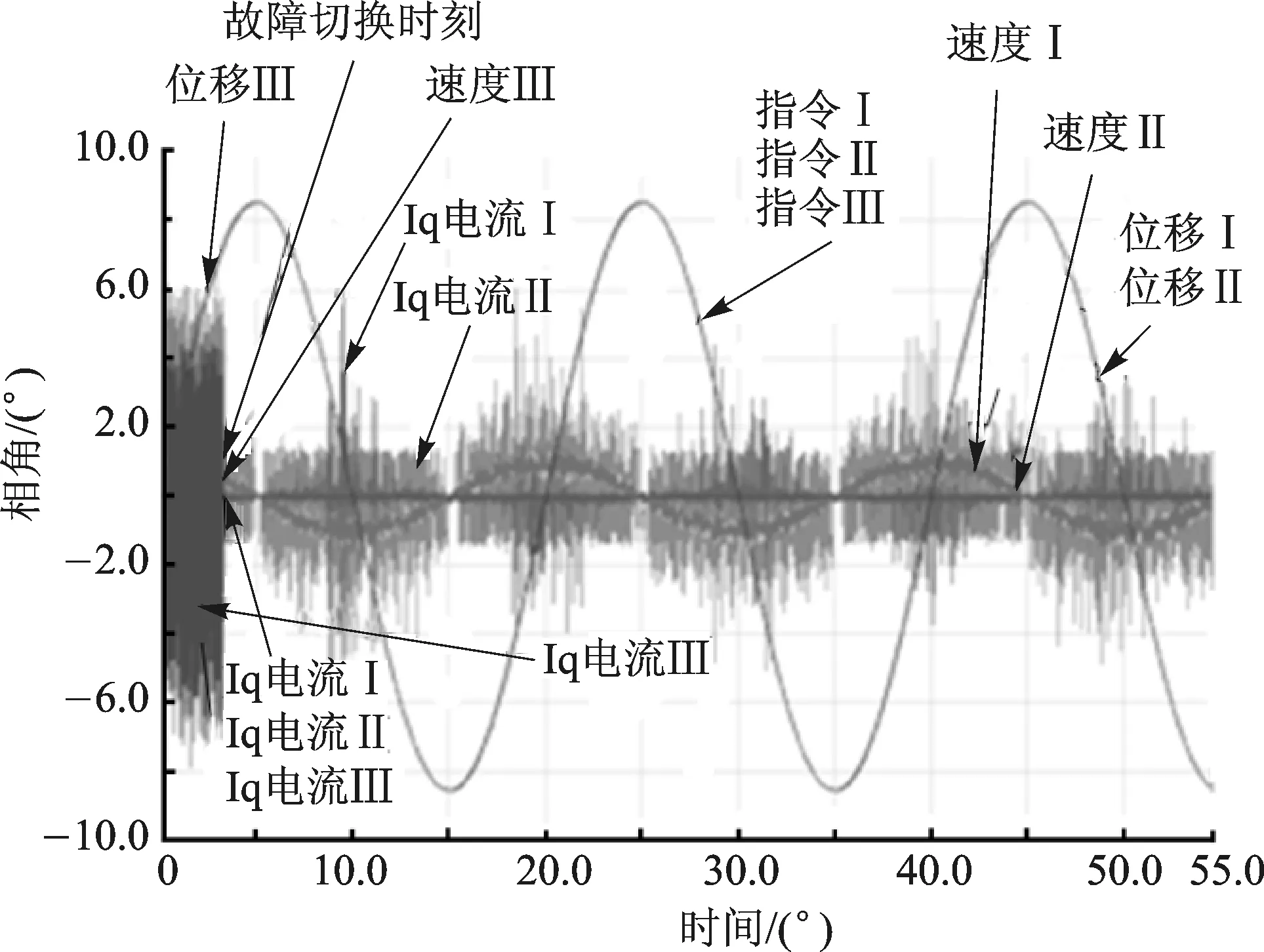
圖3 順從性故障試驗
5.2 對抗性故障
由上位機編程設定位置指令信息,位置指令設定為0.05 Hz,不同幅值的正弦信號,運行過程中0輸入指令和正常幅值指令切換,模擬位置指令0輸入故障過程,同時三冗余驅動器實時反饋各自電機的電壓、電流、位移、速度信號,通過位置指令信號和各自電機的電壓、電流、位移、速度信號來判斷三余度系統對抗性故障時各通道電機的位移、速度或電流是否有畸變。要求三余度機電伺服機構在故障處理過程中正常工作,運動平穩,不得有突跳等異常動作現象。
試驗結果如圖4所示,由圖可知:三余度機電伺服機構在對抗性故障處理過程中運動平穩,沒有突跳等異常動作現象。但由于一路電機對抗系統輸出,成為負載,系統性能降低。
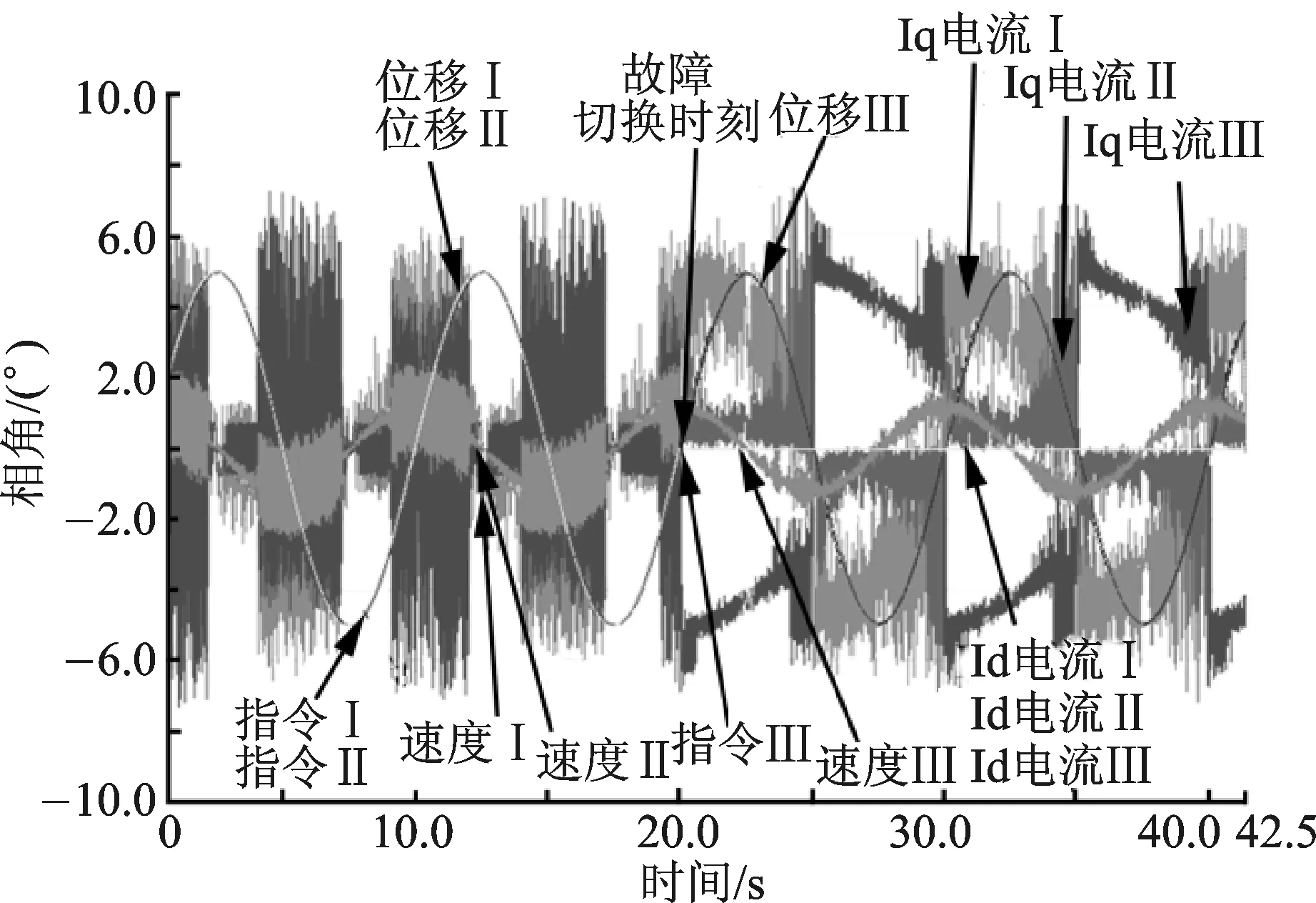
圖4 對抗性故障試驗
結 語

[1] 陳伯時,陳敏遜. 交流調速系統[M].北京:機械工業出版社, 1998.
[2] 郭慶鼎,王成元.交流伺服系統[M].北京:機械工業出版社,1994.
[3] Bin Zhang,Yaohua Li.A PMSM Sliding Mode Control System Based on Model Reference Adapative Control.Power Electronics and Motion Control International Power Electronics & motion control confevence;2000(1):336-341.
[4] Texas Instruments.Implementation of Vector Control for PMSM Using the TMS320F28335 DSP, 1998.
[5] 陳伯時.電力拖動自動控制系統-運動控制系統[M].3版.北京:機械工業出版社,2003:200-205.
[6] 劉和平.DSP原理及電機控制應用: 基于TMS320LF240x系列[M].北京:北京航空航天大學出版社,2006.
邸彩蕓(講師),主要研究方向為電工電子技術和電力傳動相關技術。
主編點評: 視線追蹤控制的文章日益增多,這類應用將人眼從視角追蹤變成了視覺控制的眼球運動,勢必改變人眼視覺的生理功能,由此帶來的人類視覺生理變化須從醫學角度認真考慮。這類應用不只是技術問題。
Real-time Data Sharing Triple Redundant Servo System Redundancy Management Based on DSP Multiprocessor
Di Caiyun1,Li Mingxing1,Qiao Sen2,Chen Jinhui1,Chen Shikun1
(1.Skills Training Center,State Grid Jibei Electric Power Company,Baoding 071051,China; 2.Beijing Institute of Precision Mechatronics and Controls)
A multiprocessor real-time data sharing triple redundant servo system based on TMS320F28335 is designed in this paper.Firstly two interactive communication platforms for the child controller which based on Mcbsp bus are built,and the three degree servo system data sharing and information interaction are realized.Then a bolder new approach named double interactive comparison current balance is proposed,which realizes current balance strict synchronization,it gives a good solution of the triplex redundancy servo’s torque disputes.Finally the key research on voting control strategy redundancy management is studied to attain a high reliability of redundancy degradation smooth switching.The product not only has good function performance but also has high reliability.
triple redundant servo system;TMS320F28335;multiprocessor real-time data sharing;redundancy management
TP273
A
?迪娜
2017-04-21)
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電子制作(2018年11期)2018-08-04 03:25:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
汽車維修與保養(2015年6期)2015-04-17 03:31:50
