基于SX—815Q裝置機器人單元工作任務的研究
2017-09-05 14:24:19趙麗
山東工業技術 2017年15期
趙麗
摘 要:根據SX-815Q由MPS模塊化生產線設備中的六軸工業機器人單元控制要求研究教學中的怎樣拆分該單元的工作任務,及任務中的教學實施核心專業知識,達到該設備在教學中的充分利用。
關鍵詞:六軸工業機器人;控制要求;工作任務;程序編寫;參數設置
DOI:10.16640/j.cnki.37-1222/t.2017.15.024
SX-815Q由MPS模塊化生產線設備組成,共分為顆粒上料、加蓋擰蓋、檢測分揀、6軸機器人和成品入倉五個基本工作單元和幾個擴展單元組成,工作單元由工業機器人、PLC、特殊功能模塊、變頻器、伺服驅動、步進驅動、氣動元件、觸摸屏等工業控制器件構成。以下就是筆者對六軸機器人單元工作任務研究的內容:
1 六軸工業機器人單元控制要求
六軸工業機器人單元。其控制要求是:
(1)“單機”工作狀態下按“啟動”按鈕,或者“聯機”狀態下,主站給出“啟動”信號后,系統進入運行狀態,“啟動”指示燈亮,檔料氣缸伸出,同時推料氣缸A將物料盒推出到裝箱臺上;機器人開始從檢測分揀單元的出料位將物料瓶搬運到物料盒中;物料盒中裝滿4個瓶子后,機器人再用吸盤將物料盒蓋吸取并蓋到物料盒上;6軸機器人最后根據裝入物料盒內4個物料瓶蓋顏色的順序,依次將與物料瓶蓋顏色相同的標簽貼到盒蓋的標簽位上。
(2)在“單機”工作狀態下按“停止”按鈕,或者“聯機”狀態下主站給出“停止”信號,“停止”指示燈亮,系統進入停止狀態,機器人停止搬運,其它所有機構均停止動作,保持狀態不變。
(3)在“單機”工作狀態下按“復位”按鈕,或者“聯機”狀態下主站給出“復位”信號,“復位”指示燈亮,系統進入復位狀態,機器人復位,其它執行機構均恢復到初始位置。
(4)初始位置要求:機器人處于安全位置;加蓋定位氣缸縮回;A、B推料氣缸縮回;升降機構A處于第一個盒子出蓋高度;升降機構B處于第一個蓋子出蓋高度。
2 六軸工業機器人單元工作任務
根據控制要求經理論分析得到了實訓的工作任務是:
任務一:六軸工業機器人單元安裝與接線。
RV-2SD型工業機器人是一款額定負載2公斤的,小型6自由度工業機器人,它由機器人本體,控制器,示教器等組成。
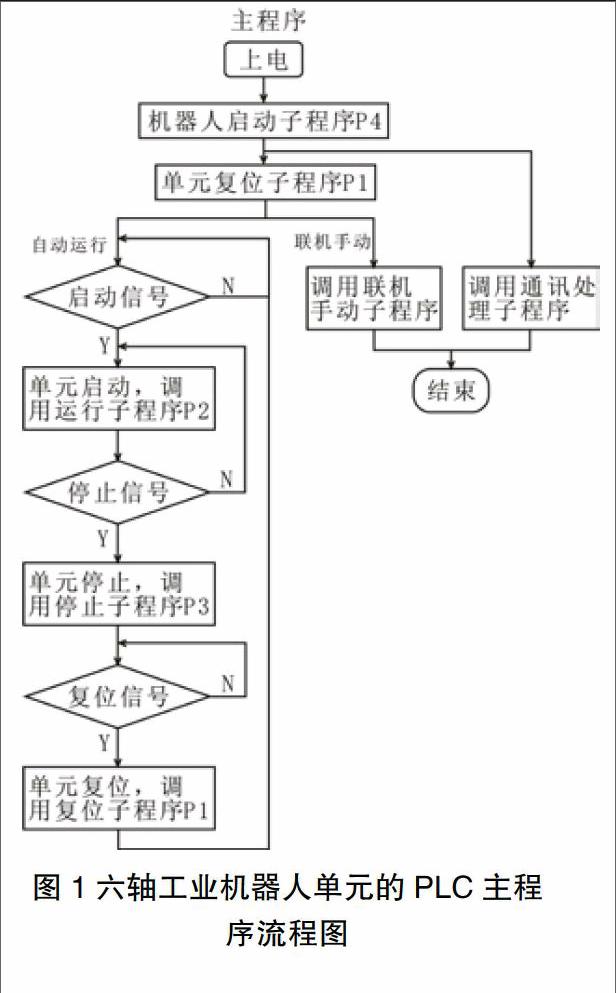
任務二:六軸工業機器人單元的PLC程序設計;
根據六軸工業機器人單元控制要求編寫PLC主程序流程圖如圖1所示,之后根據主程序流程圖編寫PLC的控制程序。
任務三:六軸工業機器人的程序編寫與參數設置
2.1 程序編寫
根據控制要求編寫機器人程序,再輸入到機器人專用編程軟件RT TOOLBOX2里再把程序下載到控制器里,就完成了程序編寫的任務。
2.2 參數設置
2.2.1 三菱6軸機器人原點數據輸入。
(1)在“在線”的模式下,點擊“在線”,再“維護”,然后雙擊“原點數據”, 再點擊“原點數據輸入方式(R)”,
(2)根據機器人自帶的原點數據填寫原點數據,
(3)填寫完成之后,再點擊“寫入”(每臺機器人的原點數據不同,根據機器人自帶的I/O數據設定)。
2.2.2 三菱6軸機器人專用I/O的編輯
(1)在“在線”的模式下,點擊“在線”,再點擊“參數”,然后點擊“專用輸入輸出信號分配”前面的“+”。
(2)雙擊“通用1”,設定通用I/O,編輯完成之后點擊“寫入”。
(3)完成之后機器人自動重啟,通用I/O設置完成。
2.3 三菱6軸機器人點示教
(1)將機器人控制器的MODE撥到“MANUAL”手動控制檔。
(2)按下示教盒的“ENABLE”鍵,這時“ENABLE”會發出黃光,
(3)再按一下“EXE”鍵進入“程序管理”界面,
(4)點擊“F2”進入到“點位置”界面。若更該其他點,請點擊“F3”或 “F4”來選擇。
(5)點擊“JOG”按鍵,進入到手動控制畫面,說明:可以通過“F1”鍵切換換到“關節”模式。
(6)在一直按住示教盒背面的使能鍵情況下,點擊“SERVO”
鍵。說明:示教盒的使能鍵,有三個開關位置為“0-1-0”,只有當為“1”的情況下,使能鍵是有效的,在默認的情況下為“0”;當輕按時候,會發出一個輕“啦”的聲音,此時為“1” 使能鍵有效;當再用力按的時候,會發出一個比較大的“啦”聲音,此時為“0” 使能鍵無效。
當伺服電源的指示燈亮的時候,在手動界面中按“+X”、“-X”、“+Y”、“-Y”、“+Z”、“-Z”、“+A”、“-A”、“+B”、“-B”、“+C”、“-C”使機器人移動到自己所需要的位置。
(7)當完成移動機器人到所需要的位置時,點擊“JOG”退出手動控制模式;回到“點位置”界面。
(8)點擊“F2”進行點示教,再點擊“F1”,這樣P1點就示教成功。
任務四:六軸工業機器人單元的調試與運行。
調試的過程主要是看機器人控制器和PLC能否實現配合運行,其中機器人控制器的輸出是接在PLC的輸入端,PLC的輸出是接在機器人控制器輸出端,來實現互相配合運行的。
以上就是我的對業機器人單元工作任務的分析和研究,通過分析和研究能更好的應用到教學當中去。
參考文獻:
[1]ModularProduetionsystemHandbook,FESTO公司,1997(10).
[2]袁培根.基于嵌入式控制的門禁系統的設計與研究[J].實驗室研究與探索,2001,20(05):62-64.
[3]王治文.面向開放管理的實驗室門禁系統[J].實驗室研究與探索,2009,28(06):60-63.