低功耗運動檢測的無線傳感器網絡節點設計
2017-09-08 06:54:01蘇渤力胡治國
電子技術與軟件工程 2017年14期
文/蘇渤力 胡治國
低功耗運動檢測的無線傳感器網絡節點設計
文/蘇渤力 胡治國
許多工業和智能樓宇自動化系統都使用運動檢測器檢測是否有人從而控制不同的功能,通過關閉某些功能來提高效率。針對大型無線傳感器節點網絡的功耗限制需求,設計了由無線通信芯片CC1310、PIR運動檢測器、LPV521構成濾波器、TLV3691構成窗口比較電路及PCB天線構成的低功耗運動檢測的無線傳感器網絡節點。該節點系統采集運動信息(例如占位檢測、入侵檢測、運動檢測),通過無線通信芯片CC1310由PCB天線發送到主控系統,可以實現智能樓宇的遠距離實時運動檢測。
傳感節點 數據采集 運動檢測 無線通信
許多工業現場和樓宇自動化系統都使用運動檢測器檢測是否有人從而控制不同的功能,例如照明,通過在不需要的時候關閉這些功能來提高效率。這些系統往往需要增加無線傳感器節點的數量來實現大范圍控制,采用無線通信方式一方面可以避免連線降低成本,另一方面增強了系統的可拓展性。但是無線傳感器節點越多耗電越多,頻繁的更換電源會造成成本增加。通過設計低功耗的運動檢測無線傳感器網絡節點,實時獲取運動感測信息并通過板載天線發送數據到主控系統,實現低功耗、遠距離、精準的智能樓宇無線控制。
1 節點硬件設計
無線傳感器節點的設計是運動檢測的核心,主要是通過PIR運動檢測器采集運動信息,經過適當的預處理發送到無線通信芯片CC1310,CC1310無線通信芯片具有射頻控制子系統,通過其射頻控制子系統將采集到的運動信息經板載天線發送出去,主控系統通過板載天線接收運動信息。無線傳感器節點由傳感器模塊、無線通信芯片模塊、PCB天線和電源模塊4部分組成,硬件結構如圖1所示。由于傳感器輸出的是一個非常小的信號,必須通過放大和濾波操作來放大信號并濾除噪聲,以便獲得合適的輸出信號,最大程度上減少虛假觸發事件。放大后的模擬輸出信號通過窗口比較器轉換為數字信號,用作無線通信芯片的中斷,需要的情況下喚醒CC1310實現節能的目的。

圖1:硬件結構簡圖
1.1 無線通信芯片
無線通信芯片是整個系統的核心。為了節約功耗,傳感器可由芯片內專用的超低功耗自主MCU(Sensor Controller)以超低功耗方式進行處理,該MCU可配置為處理模擬和數字傳感器,因此主MCU能夠最大限度的延長休眠時間。主MCU采用關斷模式,中斷喚醒的工作方式實現節能的目的。CC1310是超低功耗無線 MCU,兼具低功耗特點與無線和MCU功能,可極大延長傳感器終端節點的電池壽命。CC1310是一款支持多種標準的器件,軟件協議棧支持wM-Bus和 IEEE802.15.4g。CC1310器件在支持多個物理層和 RF 標準的平臺中將靈活的超低功耗RF收發器和強大的48MHz Cortex-M3 MCU相結合。專用無線控制器 (Cortex-M0)處理ROM或RAM中存儲的低層RF協議命令,從而確保超低功耗和靈活度,不會以犧牲RF性能為代價來實現低功耗; CC1310具有出色的靈敏度和穩定性(可選擇性和阻斷)性能。
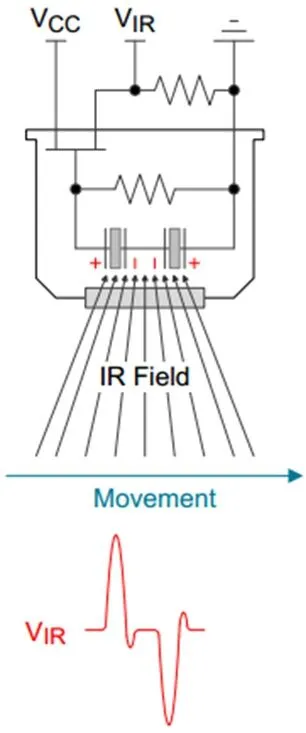
圖2:PIR運動傳感器示意圖
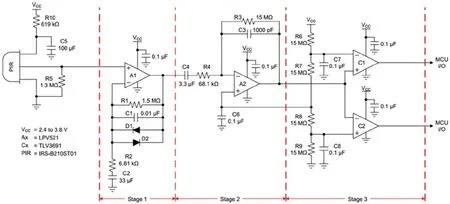
圖3:模擬信號預處理電路
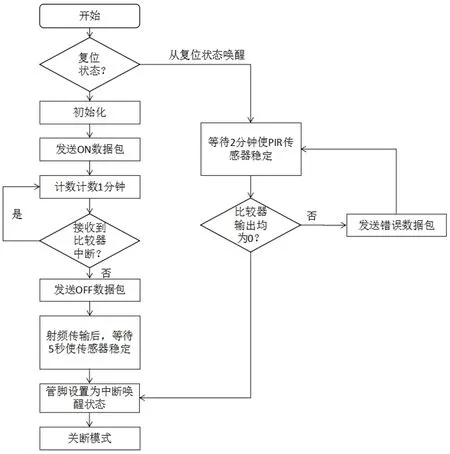
圖4:節點工作流程圖
1.2 PCB天線
天線是一個空間的概念,PCB天線的性能不如獨立天線,但是考慮到節點小型化、集成化設計因素,本設計采用PCB天線。參考德州儀器的技術文檔:天線快速選擇指南(DN035)、天線選擇詳細指南(AS058)、開放場所天線測試等文檔,綜合頻率、典型效率、帶寬和尺寸四方面因素選擇了微型螺旋PCB天線。
1.3 PIR運動檢測模塊
PIR運動傳感器包換兩個或多個元件,如圖2所示,這些元件輸出的電壓與入射紅外輻射量成正比。圖2的下半部分顯示了溫度不同于環境溫度的人體平行于傳感器表面運動并穿過兩個傳感器元件的視野時產生的輸出電壓信號。輸出電壓信號的幅值與運動速度以及相對于傳感器的距離成正比,電壓峰峰值在幾百微伏到幾毫伏之間。由于傳感器元件的物理尺寸小,感測空間較小,通常需要將菲涅爾透鏡置于PIR傳感器的前端,通過將紅外能量放大并集中到小型傳感器元件上來拓展感測范圍。菲涅爾透鏡的形狀和尺寸決定最大檢測角和觀察區域,根據應用所需的視野角度和檢測范圍決定選擇哪種透鏡。
1.4 數據預處理模塊
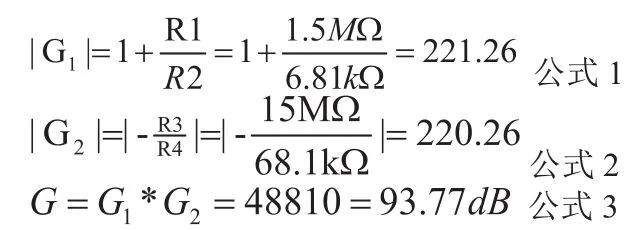
該設計中需要對 PIR 傳感器輸出端的信號進行放大和濾波, 使進入信號鏈后續各級的信號的幅值足以提供有用的信息。對于遠處物體的運動而言, PIR 傳感器輸出端的典型信號電平為微伏級, 因此需要進行放大,如圖3所示。 首先, 需要通過濾波功能在輸入到達窗口比較器之前限制系統的噪聲帶寬。 其次,濾波功能還可設置系統能夠檢測到的運動所對應的最小和最大速度限值。如圖3所示,第一級和第二級組成的濾波電路實現了采用簡單極點的四階帶通濾波器,各級電路均可實現相同的二階帶通濾波特性。帶通濾波特性所選的截止頻率設為0.7HZ及10.6HZ。對于90dB左右的總信號增益,各級的通帶增益選定為220,這樣可以最大限度提升所用傳感器偏置點的運動靈敏度范圍。為盡可能延長電池使用壽命,本設計使用 LPV521, 因為其電流消耗很低,每個放大器僅 351 nA(典型值)。此外,LPV521 還集成了電磁干擾 (EMI) 保護以降低對意外射頻 (RF) 信號的敏感度, 這對于采用高阻抗節點的低功耗設計十分有用。
濾波器的第一級作為同相增益級,該級為傳感器提供高阻抗負載,使其偏置點恒定不變。第二級作為反相增益級,由于該級輸出存在峰峰值噪聲,應盡量選取較大的R3以便將系統的動態電流降至最低水平。公式1為第一級增益,公式2為第二級增益,公式3為總環路增益。
窗口比較器的設計需要將經過放大和濾波的傳感器輸出轉換為可用作 MCU 輸入的數字信號,該信號作為主MCU的中斷信號,提示其檢測到的運動情況。采用TLV3691 構成窗口比較器電路,每個比較器的電流消耗可低至75 nA(典型值)。TLV3691 提供 一個具有輸入共模范圍的軌到軌輸入級, 此范圍超出了電源軌 100 mV, 從而可在輸入引腳上的電壓超出電源電壓時防止輸出反相。 這不但能夠提高本本設計對于電源噪聲的穩健性,還能夠在調整窗口比較器閾值時實現最大的靈活性。
1.5 電源模塊
本設計采用 CR2032 鋰離子紐扣電池作為電源。 選擇 CR2032 紐扣電池作為電源是因為這類電池普遍適用,尤其在小外形尺寸系統(如傳感器終端節點) 中的使用更為普遍。鋰離子 CR2032 紐扣電池的電壓特性也非常理想。 輸出電壓在整個放電周期內保持相對平穩, 直到電池基本耗盡。 電池電量耗盡時,輸出電壓下降相對較快。鋰離子電池的溫度特性同樣優于堿性電池, 尤其在低溫條件下的優勢明顯。 這種優勢是由于鋰離子電池中的非水電解質導電性能優于堿性電池中常見的水電解質。
2 節點軟件設計
2.1 節點工作流程
圖4所示節點流程圖介紹了本設計的工作原理。CC1310 首先檢查喚醒源。如果器件由復位操作喚醒, 則系統第一次得到上電,CC1310 將以待機模式持續運行2分鐘, 等待PIR傳感器系統上電以及工作點趨于穩定。2分鐘后,將查看窗口比較器的輸出,兩比較器在默認情況下均應輸出低電平,如果任一比較器輸出高電平,CC1310 將發送一條 ERROR消息并在傳感器工作點穩定前額外等待一段時間。PIR傳感器和模擬信號鏈正常工作后,CC1310 將進入關斷模式。CC1310將始終保持關斷模式,直至PIR傳感器通過作為中斷的窗口比較器輸出告知 MCU 檢測到運動情況。如果CC1310由 PIR 傳感器喚醒,則會發送ON 數據包通知主機控制器檢測到運動情況。CC1310將在PIR傳感器靜默1分鐘后向主機控制器發送OFF數據包并返回關斷模式。
2.2 無線傳輸
本設計通過PIR傳感器檢測是否與人存在。CC1310可能廣播3種操作值:0xEE:傳感器在啟動過程中出錯;0xAA:檢測首個運動時的ON數據包;0xFF:檢測到最后一個運動后1分鐘的OFF數據包。為了保證無線傳輸正常進行,通過SmartRFTM協議數據包監聽器軟件“監聽”數據包。數據顯示為原始數據流,可以針對該數據流進行后續分析處理。
3 結論
根據工業和樓宇自動化運動檢測需求,文中采用CC1310無線通信芯片和PCB天線相結合進行了無線傳感器節點設計,采用兩級濾波電路和窗口比較電路避免了誤觸發事件,傳感器數據采集由超低功耗自主MCU進行,主MCU處于關斷模式極大的降低了系統功耗。由該節點組成的無線傳感器網絡在模擬實驗中取得了良好的表現,低功耗能延長電池的使用壽命、降低成本。
[1]蘇波,李艷秋,于紅云,尚永紅.從環境中獲取能量的無線傳感器節點[J].傳感技術學報,2008(09):15.
[2]張建軍,陳曉,趙意.一種無線傳感器節點動態采樣策略[J].電子測量與儀器學報,2016(02):15.
作者單位 河北省三河市防災科技學院 河北省三河市101601
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
