多功能情報雷達技術體制的形成
2017-09-08 06:54:04黃亮張進華
電子技術與軟件工程 2017年14期
關鍵詞:設計
文/黃亮 張進華
多功能情報雷達技術體制的形成
文/黃亮 張進華
現代戰場面臨四代戰機的隱身、高速、高機動等性能的威脅以及彈道導彈等高威脅目標的出現,分析常規地面防空情報雷達在新形式下探測能力的不足,提出低頻段多功能情報雷達的設計思路。該雷達集低頻段反隱身、大功率、兩維相掃等技術為一體,充分挖掘綜合技術手段的探測潛能,從而形成適應現代戰場的多功能雷達技術體制。
四代戰機 隱身 多功能
隨著科學技術水平的發展以及作戰任務需求的變化,雷達的研制水平已逐漸邁向第四代。新一代雷達面臨更加惡劣的戰場環境和更加復雜的目標特性,其作戰對象包括氣動目標、導彈目標等,涵蓋了從地面幾米到大氣層外幾百千米的廣闊空間,被探測目標的散射截面積(RCS)、機動性能、氣動性能均發生重大變化。為有效應對作戰環境和被測目標的變化,滿足豐富多樣的作戰任務需求,需要開展多功能雷達技術體制研究 。
1 雷達當前的挑戰
為了替代服役多時的F-15飛機,美國空軍早在20世紀80年代初期,就提出了研制先進技術戰斗機(ATF)的計劃,經過長期實踐攻關,終于誕生了以F-22、F-35為代表的四代隱身戰斗機。而俄羅斯則主導未來戰術空軍戰斗符合體(PAK-FA)計劃的發展,研制出以T-50為代表的新一代多用途戰斗機。新一代的戰斗機都具有以下特點:
1.1 隱身性能好
隨著新材料、新技術在新一代戰斗機廣泛的應用,以及S形進氣道、機身彈倉等隱身設計的氣動布局,顯著提高了F22、T50戰斗機的隱身性能。
1.2 速度快
相較于上一代的戰斗攻擊機,F-22、T50均能夠進行超聲速巡航,可以高速突入敵方目標空域。
1.3 機動性強
與傳統的F-117A隱身飛機,為了追求低探測特性而犧牲氣動性能不同,F-22解決了隱身和氣動性能的矛盾,可以實現9g加速度和高機動回轉;同樣,T-50也采用了與F-22一致的菱形翼,從而保證了其較強的機動性。
1.4 飛行高度高
F-22、T-50的最大升限接近20000米高度,具備高空突入敵方領空的能力,不僅可以躲避多種防空火力的打擊,而且在空戰和對地打擊武器的投射上占據優勢。
與此同時,現代戰爭的形態也發生著變化,縱觀近些年全球范圍內發生的局部戰爭,以美國為首的先進作戰系統,在進行局部戰爭打擊過程中,較多的使用巡航導彈、彈道導彈對重點區域進行空襲,以及使用隱身機、無人機對包括雷達在內的重點目標設施進行定點打擊。因此,雷達自身的機動性以及對導彈目標的探測已成為雷達目前應該具備的能力。與此同時,導彈類目標具有高速、高加速、高威脅的特性,也對目前雷達的性能提出了更高的要求。
2 多功能雷達技術體制分析
與現有防空警戒雷達相比,目標RCS的下降造成雷達功率孔徑積需增加約20 dB(隱身飛機的RCS 比常規飛機小約20 dB),由于機動性要求的限制,依靠提升雷達規模的途徑已無法滿足要求。從反隱身的角度分析,低頻段具有對隱身目標潛在的探測能力優勢。從應對高機動目標角度分析,相控陣體制的快速波束調度能力相對于機械掃描的方式具有明顯優勢。從應對遠距離導彈類目標的觀測,必須提高雷達的發射功率。因此,將過去防空網絡中的中高頻段兩坐標雷達升級成具有較強機動能力的三坐標雷達,增加雷達發射功率,實現兩維相掃功能,將有效提高對隱身戰機目標的探測能力和防空網的生存能力。
2.1 概述
隱身戰斗機、無人戰斗機、導彈目標等高威脅目標的出現已成為現代戰爭中的新常態,如何從設計角度破解防空網絡所面對的威脅非常急迫。針對雷達面臨的探測目標多樣、機動能力強、威力遠等的要求,同時借鑒國內外雷達探測領域的先進經驗,從雷達相關基本原理分析,給出典型的地面多功能的防空情報雷達的技術形態。
2.2 工作模式
針對不同場景和探測目標,多功能雷達工作模式有多種,其主要模式包括搜索工作模式和跟蹤工作模式等。工作模式的設計是多功能雷達系統設計的關鍵環節和基礎,優化工作模式設計是系統設計的核心。以下對影響搜索工作模式和跟蹤工作模式設計的各種因素逐一進行分析,得出了設計方法和步驟。
2.2.1 搜索工作模式
2.2.1.1 確定搜索模式的考慮因素
對于多功能雷達,其作戰環境復雜,探測目標多樣,搜索模式應考慮以下因素:
(1)目標特性。目標特性可由目標類型和運動特性表征,所觀察目標的類型有:飛機、導彈、艦船、外空飛行器等。目標運動特征包括進攻性目標的攻擊方式和機動性能等。多功能雷達所觀察的目標包括多種類型:飛機和空對地/地對空導彈等。
(2)監視空域。搜索屏立體角與監視空域的范圍有關,搜索屏應能對所要求的監視空域內的目標進行屏狀截獲并對設定區域內的目標進行邊搜索邊跟蹤。
(3)數據率。由于部分被測目標速度、加速度高,機動能力強等特點,搜素數據率應滿足一定要求,否則易造成漏警、目標丟失等問題。
(4)其他因素。此外,雷達還面臨著不同的自然環境的雜波影響,外界電磁環境的影響,以及主動式干擾等諸多因素的影響。此類因素較為復雜,已有廣泛的文獻進行了深入的討論,本文不再贅述。
2.2.1.2 搜索工作模式設計
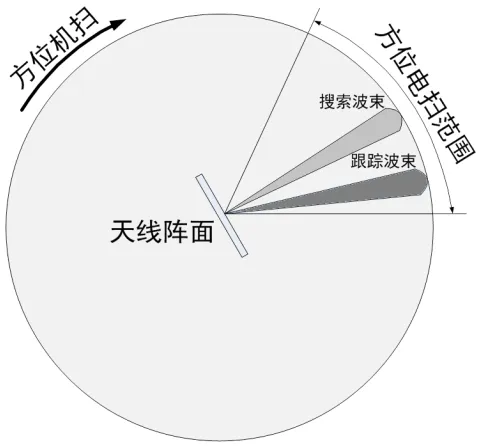
圖 1:多功能雷達探測示意圖
(1)隱身戰機、無人機等氣動目標。從此類目標飛行軌跡方面考慮,具有飛行航跡遠、制空時間長、飛行方向無規律的特點。因此,搜索工作模式設計時,應考慮到空域上盡可能覆蓋全方位。
(2)導彈類高速、高威脅目標。此類目標具有角速度變化快、威脅等級高等特點,因此,在搜索此類目標時,應考慮到雷達快速發現能力,并需充分保證搜索數據率。
2.2.2 跟蹤工作模式
跟蹤的方式一般可分為兩類:一類為邊搜索邊跟蹤方式(TWS);另一類為邊跟蹤邊搜索方式(TAS)。由于TWS的數據率較低,因此一般用于對空探測。對導彈目標探測,則要求的數據率較高,因而常用TAS方式。
跟蹤模式設計的基本原則就是達到所需求的跟蹤測量精度,而雷達的跟蹤測量精度與跟蹤采樣率密切相關,文獻[3]依據典型目標探測跟蹤精度的要求,將跟蹤采樣率分為三類。第一類為低采樣率的目標跟蹤,例如氣動目標等,用于完成警戒和引導,其采樣率依據目標特征一般在10~1秒之間。第二類為具有一定威脅度的目標,對其精度的要求較高,并可迅速轉入更高精度的跟蹤,其采樣率一般在1~0.5秒間。第三類是為導彈目標提供早期預警和落點預報所需的精確跟蹤數據,這類跟蹤的采樣率一般在0.5~0.05秒之間。
為了適應探測不同類型目標的需求,這就要求雷達的波束能在方位和俯仰二維方向上靈活地進行變化,指向預定的空域,而且要能自適應地控制雷達的能量、波形和脈沖數,以不同的信號處理方式匹配于戰場環境[4][5]。因此多功能雷達采用一維機掃+兩維相掃的相控陣體制是合理的選擇。
2.3 頻段選擇
雷達波隱身是指在飛機某一特定方位角及俯仰角范圍內降低其雷達散射截面(RCS)。其技術途徑主要包括外形技術、雷達吸波材料技術、電子對抗和等離子體技術等,合理的外形設計可將RCS值減少75~90%,如果將外形技術、天線隱身技術與材料技術結合起來,RCS值可減少更多。
由文獻[5]可知單基地搜索雷達方程:

根據天線增益的定義:

其中ωs為天線波束的立體角,Ω為要完成的搜索空域的立體角,ts為搜索時間(數據率),t0為駐留時間。
同時,接收天線增益為:

將(2)、(3)式代入(1)式,可得搜索雷達方程為:

由方程(4)可知,在目標RCS降低的情況下,要保障雷達的威力,應增加雷達系統的功率孔徑積。
文獻[10]給出了某型隱身巡航導彈鼻錐方向RCS數據,其研究結果表明,隱身目標在低頻波段表現出較大的RCS,低頻段的選擇對于隱身目標的探測可貢獻相對微波波段5dB~20dB以上的增益,而這么大的增益單純從雷達系統的功率孔徑積上獲得是難以想象的,需要付出相當大的代價。
功率孔徑積受到各種物理條件的限制,通常來說,頻率越低,越容易獲得較大的功率孔徑積。因此,米波段相較于分米、厘米波段對探測隱身飛機更為有利,但米波段雷達具有測角精度低、陣面口徑大、架設撤收時間長的缺點,而多功能雷達要完成多功能任務必然需要具備較高的探測精度和戰場生存能力,同時考慮到戰場對目標測角精度以及裝備機動性的要求,米波段不適用于多功能雷達的應用。綜合從反隱身、測量精度、機動性、制造成本等方面進行比較可知:多功能預警雷達比較適宜在半米波波段范圍內選擇適當頻率,而遠程警戒雷達可選在米波段工作。
2.4 數據率的要求
2.4.1 徑向和切向目標
由于常規的預警雷達多采用方位上掃描方式,因此對于經向或者切向飛行的目標,探測數據率需滿足預警反應時間內被測目標不產生顯著威脅。由于需兼顧全方位固定翼目標的探測,僅依靠單部雷達的相掃功能無法滿足此需求,需采用方位機械軸轉動的掃描方式。因此,機械軸旋轉速度決定了探測數據率,也就決定了探測徑向和切向飛行目標兩點之間的間距:

以具有高速巡航能力的F-22為例,按巡航速度為1.8馬赫計算,同時按第一類低采樣率目標跟蹤數據率10秒計算,兩點之間飛行距離約為6公里,這相對于預警雷達的探測威力來說,已能夠預留足夠的系統反應時間。
同時由(5)式可知,在目標飛行速度一定的情況下,要想使得探測到目標的兩點之間間距較小,進一步提高探測精度,應提高機械軸旋轉掃描的角速度。但是,由于對隱身目標探測的需求,雷達孔徑尺寸往往較大,這就限制了機械軸的旋轉速度。因此,在多功能雷達設計時,需要對兩者進行折衷的考慮。
2.4.2 俯仰躍升目標
由于導彈類目標具有俯仰上變化率較快的特點,對于此類突然躍升目標的探測,設躍升速度為vE、搜索數據率為Δt,則在每個搜索幀周期內,上升高度為h=vEΔ t。設為達到所需的攔截概率所需的攔截次數為k,則低空搜索屏的高度為:

其中R為目標距離,θ0為波束俯仰寬度。由(6)式可以看出,當目標速度、距離確定時,對于同一部雷達來說,為達到相應的攔截概率,所需的攔截次數k增大時,需減小Δt的值,這對于機械轉動的掃描方式來說,是無法實現的。因此,應利用相掃方式數據率高的特點,工作在停轉相掃的情況下,減小相掃空域范圍從而減小Δt的值。而對于不同雷達來說,攔截次數與θ0和Δt的比值有關,因此,探測同一目標時,增大波束俯仰寬度,可以提高攔截概率。因為波束寬度與等效孔徑成反比,要增大波束寬度需減小雷達的等效孔徑,而為了提高雷達的探測威力,卻又需要提高雷達的等效孔徑,因此兩者之間同樣需要進行折衷。
2.4.3 不等間隔數據率的探索
對于高速、高機動的四代戰機的探測,還可以充分發揮新型雷達一維機掃+兩維相掃體制的優勢,對重點高威脅目標采用不等間隔跟蹤模式,采樣間隔在幾百毫秒和幾秒之間交替,俯視圖如圖 1所示。為了減少跟蹤的動態滯后誤差,提高跟蹤全過程中的跟蹤精度和速度精度,可以采用自適應濾波算法,減少動態滯后誤差,抑制隨機誤差,確保濾波收斂,最終達到對高速運動目標不等采樣的連續、精確跟蹤。
2.5 機動性
現代戰爭中雷達是首先和重點被攻擊的目標,通常雷達陣地目標特性明顯,其偽裝防護比較困難,加之其輻射輸出功率源的特性,極易被偵查定位和遭到火力攻擊。雷達具有較強機動性能,就可以在發現可能被攻擊征候時,有計劃地組織其快速轉移到預備和隱蔽陣地展開,這對提高雷達的生存能力具有十分重要的作用。
在1982年的貝卡谷地之戰和1986年的美利沖突中,以色列和美國憑借其偵察機和電子戰飛機的有效支援,分別成功地壓制和摧毀了敘利亞的蘇制SA-2、SA-3、SA-6和利比亞的蘇制SA-5及其雷達在內的地空導彈系統。這些導彈系統中除SA-6外,均為固定或半固定式,機動性極差。可見,機動性是決定防空武器系統生存能力的關鍵因素之一。
低頻段的多功能情報雷達將是探測隱身目標和對空指揮、引導、目標指示的骨干裝備,雷達天線口徑必然會很大,如何提高其機動性也是雷達設計時所考慮的重點。
針對天線系統架設與拆收過程中使用的機構很多的特點,目前一般采用先進的機電液一體化技術。在保證各種機構操作的安全性和可靠性條件下,可在較短時間內完成架設或撤收,從而提高雷達的機動性。
2.6 小結
經過幾十年的發展,雷達已根據使用要求的不同而進化成不同的形態,但是其基本原理并未發生重大變化。因此,設計不同需求下的雷達,是根據雷達的基本原理,從多個不同的方面進行折衷考慮的過程,進而形成最終的方案。
本文針對多動能雷達所面臨的戰場環境,以及作戰對象的特點,綜合威力、搜索能力、數據率和機動性等要求,給出了多功能情報雷達的設計思路。
3 結束語
本文針對現代戰場上四代戰斗機隱身、高速、高機動等特性,以及彈道導彈等高威脅目標的出現,提出了低頻段多功能防空情報雷達的設計思路:集低頻波段反隱身、大功率孔徑積、兩維相掃、機電一體化等技術為一體,從而形成適應現代戰場的多功能情報雷達技術體制。
[1]趙培聰.2010年隱身與反隱身技術發展情況[J].現代雷達,2011,33(04):9-12. Zhao Peicong.Development of Stealth and Anti-stealth Technology of Foreign Country in 2010.Modem Radar, 2011,33(04):9-12.
[2]Kuschel H,Heckenbach J,Muller S.On the potentials of passive,multistatic,low frequency radars to counter stealth and detect low flying targets[C].2008 IEEE Radar Conference.[S]:IEEE Press,2008:1-6.
[3]張亞朋.多功能雷達工作模式研究[J].現代雷達 ,2003,25(08):1-4.Zhang Yapeng.A Study Operating Modes of Multi-function Radar[J].Modem Radar,2003,25(08):1-4.
[4]Skolnik M.Opportunities in Radar [J].Electronics and Communications Engineering Journal,2002,14(06):263-272.
[5]張光義.相控陣雷達原理[M].北京:國防工業出版社,2009.Zhang Guangyi. Principles of Phased Array Radar. Beijing:National Defense Industry Press,2009.
[6]周萬幸.天波超視距雷達發展綜述[J].電子學報,2011,39(06):1373-1378.Zhou Wanxing.An Overview on Development of Skywave Over-the-Horizon Radar[J].Acta Electronica Sinica, 2011,39(06):1373-1378.
[7]Skolnik M I.Radar Handbook(2nd Edition)[M].McGraw-HillBookCompany, 1990.
[8]陳振邦.防空情報雷達系統的反隱身優勢[J].系統工程與電子技術 ,1992(01):63-69.Chen Zhenbang.The Anti-stealth Advantages of the Air Defence lnformation Radar System.Systems Engineering and Electronics. 1992(01):63-69.
[9]余宏明. 雷達/電子戰中的現代隱身技術[J]. 現代雷達,2007,29(06):25-27.Yu Hongming.Modern Stealth Technique in Radar/EW.Modem Radar,2007,29(06):25-27.
[10]沙祥,萬華,王寶.第四代低空監視雷達技術體制探討[J].空軍雷達學 院 學 報 ,2012,26(03):170-173.SHA Xiang, WAN Hua,WANG Bao.Discussion on Technology System of the Fourth Generation Low Altitude Surveillance Radar.Journal of Air Force Radar Academy,2012,26(03):170-173.
[11]酈能敬.對空情報雷達的頻率優選[J].雷達科學與技術,2006,4(01):1-6. Li Nengjing.The Optimum Frequency Selection for Air Surveillance Radar[J].Radar Science and Technology,2006,4(01):1-6.
[12]朱新國.微波交會對接雷達目標跟蹤的卡爾曼濾波器設計[J].兵工學報 ,2009,30(10):37-41.Zhu Xinguo. Kalman Filter Design for Target Tracking in Microwave Rendezvous a n d Docking Radar[J].Acta Armamentarii,2009,30(10):37-41.
作者單位 南京電子技術研究所 江蘇省南京市 210039
黃亮(1987-),男,現為南京電子技術研究所工程師。
張進華(1979-),男,現為南京電子技術研究所工程師。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
