基于微信公眾平臺的智慧農業機器人
2017-09-08 16:47:33王昕波賈臨殿
物聯網技術 2017年8期
王昕波+賈臨殿
摘 要:針對目前農業自動化存在的問題,文中設計了一款通過微信公眾平臺來操作的農業機器人。該設備實現了自動鐵犁開壟溝、自動播種、灌溉以及微信遠程獲取農田實況的操作。使用者通過微信可以獲取農田的各種信息,獲取傳感器的數值,實時監測實驗農田的環境情況。通過實地測試可以看出,此農業機器人的準確性較高且具有較強的實用性。
關鍵詞:農業機器人;微信公眾平臺;實時監測;傳感器
中圖分類號:TP242.3 文獻標識碼:B 文章編號:2095-1302(2017)08-0-02
0 引 言
20世紀中期,我國開展了有關農業機器人的研究。但因為農業環境的特殊性及技術的局限性,造成了許多問題。一方面由于很多關鍵技術有待進一步創新和完善,另一方面是季節性導致農業機器人效率較低與維護費用較高等問題[1]。隨著我國人口老齡化趨勢逐步加劇,從事農作的人口數量逐步減少,勞動力成本變高,實現農業機器人普及性的要求日益加劇[2]。隨著手機功能日益強大,微信、QQ、微博各種手機應用更豐富了我們的生活。微信接口的開放可以為開發者提供通過微信公共號來控制硬件的條件,于是使用微信來實現操作農業機器人的想法便出現了。
1 系統總體設計
1.1 硬件系統設計
本設計采用S3C6410微處理器及各電路模塊對視頻信息及溫濕度傳感器的數據進行采集,開啟WebServer服務,同時通過無線網絡與互聯網連接,將采集的數據通過瀏覽器向PC機客戶端顯示。客戶端可通過瀏覽器對處理器進行控制[3]。主機S3C6410通過視頻數據發送模塊將現場搜集的視頻流數據進行編碼后,以無線傳輸的方式由計算機網絡發送。對于接收的視頻數據, 客戶端可以進行實時播放[4]。系統軟件采用C/S結構,兩端由無線網絡建立TCP/IP連接,并按照自定義數據通信協議交換數據,實現數據通信與系統控制的功能[5]。客戶端發出連接請求,服務器端接收請求后發送信號,向客戶端發送視頻碼流。并將采集到的各種數據通過無線網絡傳輸到PC機上通過網頁顯示[6]。數據采集終端模塊包括如下模塊:
(1)超聲波測距模塊。
(2) DHT11溫度傳感器模塊。
(3)攝像頭。
(4) 紫外線傳感器。
(5)土壤濕度傳感器。
(6)W5100特性:與MCU有多種接口選擇,即直接并行總線接口、間接并行總線接口和SPI總線接口;支持硬件TCP/IP協議: TCP, UDP, ICMP, IGMP, IPv4, ARP, PPPoE, Ethernet;支持ADSL連接 (支持PPPoE協議,帶PAP/CHAP驗證);支持4個獨立的端口(Socket)同時連接;內部16 K字節存儲器作TX/RX緩存[7];內嵌10 BaseT/100 BaseTX以太網物理層,支持自動應答(全雙工/半雙工模式);支持自動極性變換(MDI/MDIX);多種指示燈輸出(Tx,Rx,Full/Duplex,Collision,Link,Speed);3.3 V工作電壓,I/O口可承受5 V電壓。
(7)Sina App Engine(SAE)公有云計算平臺。
(8)MG996R舵機。
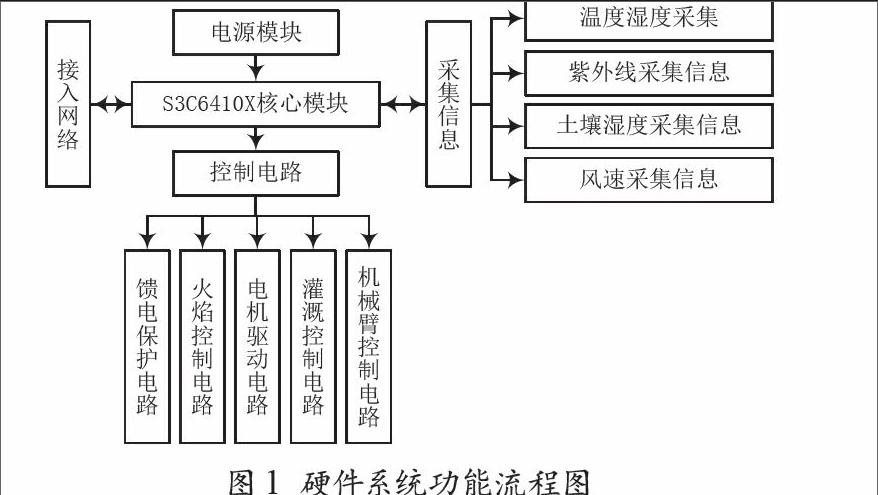
本部分主要以S3C6410X控制主板為中心,各模塊檢測到模擬量經處理后傳輸給控制主板,主板將數據進行轉化,在交互界面上顯示并做出相應調整[8]。硬件系統功能流程如圖1所示。
1.2 軟件系統設計
騰訊科技的微信接口的開放,為開發者調用微信高級接口功能提供了可能。微信是我們生活中必備的應用軟件,所以我們設計通過微信查看農田環境情況。只需關注微信公眾平臺號,就可以通過發送簡單的指令來查看農田里機器人的狀態[9]。通過以太網卡將傳感器上傳的農田土壤濕度、農田環境溫度濕度、風速、紫外線強度等上傳到新浪SAE服務器[10]。微信公共號控制S3C6410硬件實現流程如圖2所示。
2 測試與分析
我們將該農業機器人進行了現場實地測試,測試的功能包括土壤溫度測試、農田溫度測試、農田紫外線強度測試及其他測試。經測試,該農業機器人能夠對農田進行實時監測與準確測量,同時也具有很強的環境適應能力。
2.1 查看采集的土壤濕度
土壤濕度傳感器如圖3所示。
2.2 查看采集的環境溫度
溫濕度傳感器如圖5所示。
3 結 語
本文設計的產品可以幫助農業科研人員和普通用戶對農田進行研究時方便的獲取農田的精確數據。利用微信公共號來獲取信息,突破空間、時間的限制。該系統對農業生產活動起指導作用,實用性強。使用微信公共平臺對硬件進行驅動是對現代農田建設系統新的突破點。
參考文獻
[1]沈明霞,姬長英.農業機器人的開發背景及技術動向[J].農機化研究,2000(2):31-35.
[2]徐崇庶,張博玲.歐美國家中的農業機器人[J].機器人技術與應用,1998(3):12-13.
[3]胥芳,張立彬,計時鳴,等.設施農業中的機械化裝備及其技術發展[J].浙江工業大學學報,2001,29(2):136-141.
[4]崇嶺.西瓜收獲機器人[J].機器人技術與應用,1998(5):21-22.
[5]王新忠.溫室番茄收獲機器人選擇性收獲作業信息獲取與路徑規劃研究[D].鎮江: 江蘇大學,2012.
[6]宋偉科.基于多機器人的開放式智能控制系統關鍵技術研究與開發[D].天津:天津大學,2012.
[7]王歡,王玉博,尚萌,等.輪式移動機器人的主控制器設計[J].電工文摘,2014(5):20-22.
[8]王會方.串聯機器人多目標軌跡優化與運動控制研究[D].杭州:浙江大學,2011.
[9]陳衛東,董勝龍,席裕庚.基于開放式多智能體結構的分布式自主機器人系統[J].機器人,2001,23(1):45-50.
[10]張鑫.移動機器人導航中的軌跡跟蹤與群集運動控制研究[D].西安:長安大學,2012.endprint