一種用于登乘棧橋的主動波浪補償方法
2017-09-14 02:48:59蘇長青鄭文彬曾悠兵丁德甫
船舶與海洋工程 2017年4期
關鍵詞:船舶
蘇長青,鄭文彬,曾悠兵,丁德甫
(九江精密測試技術研究所,江西 九江 332000)
一種用于登乘棧橋的主動波浪補償方法
蘇長青,鄭文彬,曾悠兵,丁德甫
(九江精密測試技術研究所,江西 九江 332000)
針對高海況下風電塔運行維護的實際工程需求,設計一種帶有主動補償功能的登乘棧橋。分析棧橋的結構設計,以此為基礎進行補償模型的計算分析。以高速數字信號處理器為核心構建補償控制系統,利用運動參考單元實時測量運維船的姿態及升沉變化,根據補償模型計算出液壓缸所需的運動行程,對液壓系統進行控制,分別進行橫搖、縱搖及升沉的補償, 確保棧橋末端與塔基相對穩定,從而確保風電塔維護人員安全登乘。對運維船進行的碼頭系泊試驗結果表明:該棧橋系統可有效補償波浪對運維船的影響,完全滿足高海況下的運維通勤需求。
登乘棧橋;主動波浪補償;運動參考單元
0 引 言
隨著能源需求持續增長,我國海上風電行業迅速發展,風電機安裝數量大幅增長[1]。然而,受潮汐、臺風、氣流和閃電等環境因素影響,海上風電機組容易出現故障。因此,海上風場在運營時通常需要配置維護船舶來提供通勤服務,將專業技術人員安全、快速地運抵作業現場。面對突發情況,專業化的運維船舶在抵達作業現場后,由于潮汐和海上風浪的疊加作用,使得海面與風機基礎鋼爬梯間的落差過大,無法攀爬登陸。現階段海上輸送風電塔維護人員一般采用直升機輸送和船舶吊機輸送2種方式,其中:直升機輸送需要風電塔額外提供直升機降落平臺,考慮到直升機尺寸的限制,每次輸送的維護人員數量有限;而船舶吊機輸送時,吊機懸掛的吊籃會隨著船舶的運動而運動,一旦船體劇烈搖晃,吊籃里維護人員的安全將難以得到保證。
目前,國內帶有波浪補償功能的裝置及專利多見于起重機、鉆探機、打撈作業和并靠補給等設備中[2],對于海上風電登乘設備,尚無成熟的登靠裝置可用。
1 棧橋結構設計
運維船在空間內的運動共有6個維度,分別為3個線運動和3個角運動。其中:3個線運動用橫蕩、縱蕩及升沉來表示;3個角運動用歐拉角來表示,分別為航向、縱搖及橫搖。國內某些型號的主動波浪補償系統采用Stewart平臺來補償船舶在6個維度上的運動[3],將登乘棧橋安裝于船頭中心位置,使用時運維船一直頂著風電塔基,可消除橫蕩和縱蕩的影響,并可保證航向的穩定,大大簡化了系統設計。因此,登乘棧橋只需要補償船體的橫搖、縱搖和升沉運動,具有3個維度的補償量。在結構上,設計的登乘棧橋由補償橫搖運動的橫搖油缸、補償縱搖運動和升沉運動的縱搖油缸及伸縮油缸組成,此外還包括登乘梯、扶手及安裝底座等裝置,系統的總質量約1450kg,具體結構形式見圖1。
2 補償模型分析
登乘棧橋的升沉補償是通過比例閥來控制液壓油缸的行程,從而推動整個棧橋在動態情況下保持穩定。縱搖運動與升沉運動會復合在一起,影響末端登乘點的位置;橫搖運動只影響登乘棧橋的姿態。下面分別對這2部分進行補償分析。
2.1 橫搖補償
對登乘棧橋的橫搖運動進行建模,抽象出由L1,L2和L3組成的三角形(見圖2)。從圖2中可看出,在橫搖運動補償中,只需保持L2與水平面的夾角β恒定,即可保證平臺的穩定。由圖2可知
式(1)中:α為L1與L2的夾角;θ為L1與甲板的夾角;γ為甲板繞艏艉線與水平面的夾角(即橫搖角),右舷下降為正,通過運動參考單元測量得到;β為L2與水平面的夾角。θ和β均由機械尺寸設計值確定。
只需調節L3的大小(即液壓油缸的行程),即可改變α的大小,保持β恒定,從而保持棧橋基座的穩定。
2.2 縱搖及升沉補償
對登乘棧橋的縱搖運動及升沉運動進行建模,抽象出由L6,L7和L8組成的三角形(見圖3)。從圖3中可看出,在運動補償時,要通過改變L7來調整登乘梯的姿態,通過改變L9來調整登乘梯的長度,確保登乘點T的穩定。
假設縱搖角和升沉均為 0,以運動參考單元安裝點O為原點,船頭方向為x軸正方向,垂直水面向上為y軸正方向,建立坐標系。以登乘梯保持水平時的登乘點T為穩定目標點,則T點的坐標為
式(2)中:L4為船頭與運動參考單元的距離;L5為O′A′的長度;L6為A′B′的長度。
在升沉運動與縱搖運動復合下,運動參考單元安裝點運動至O′點,B點運動至B′點,可計算出B′點的坐標為
式(3)中:θ為艏艉線與水平面的夾角(即縱搖角),艏抬高為正,通過運動參考單元測量得到;h為運動參考單元測得的安裝點的升沉。
此時可通過距離公式計算出B′T的長度為
縱搖補償油缸L7的長度為

只需調節L7和L9的大小(即液壓油缸的行程),即可改變β的大小和登乘梯的長度,從而保持棧橋末端與風電塔基座的相對穩定。
3 控制系統
風電塔登乘系統通過數字信號處理器實時采集液壓油缸中位置傳感器的信息和運動參考單元輸出的姿態信息,并通過補償計算得到液壓油缸的目標位置,將其輸出給液壓閥控制油缸的行程。數字信號處理器采用TI公司的高性能浮點處理器TMS320C6713,主頻達 300MHz,浮點運算速度達1200MFLOPS,保證了棧橋補償運算的速度和精度,滿足實時控制的需求。運動參考單元采用 MEMS傳感器,橫搖及縱搖精度≤0.2°,升沉10cm或量程的10%,支持最大15s的升沉周期,并可根據波浪周期自動調整。其質量僅為45g,防護等級達到 IP68,可較好地適應船用設備所處的濕熱、鹽霧和霉菌等惡劣環境。控制系統組成框圖見圖4。
實時控制器利用前述的運動學模型計算出保持棧橋末端穩定所需的油缸行程,組成帶前饋和非線性補償的串級控制系統,以減小軌跡跟蹤誤差[4-5]。系統工作時有手動和主動穩定2種模式,不同模式有不同的控制邏輯。系統上電時處于空閑模式,給液壓系統上電,并充滿蓄能器。按下手動控制按鈕,手動模式運行指示燈常亮,在手動模式下可通過控制3個油缸對應的增大和減小按鈕對其進行手動調節。按下主動穩定模式按鈕,主動補償模式運行指示燈常亮,棧橋自動打開,運動到平衡位置,隨后進行主動補償,保持棧橋穩定。
在補償模式下,系統監控所有的狀態,包括運動參考單元反饋的姿態信息(用于判斷海況)、液壓油缸的行程信息及補償目標值與實際值的誤差等,并根據不同的條件給出警告或故障指示。
4 試驗驗證
在船廠進行碼頭系泊狀態下的試驗驗證,以測試登乘棧橋的補償效果(見圖5)。由于試驗時天氣條件較好,通過采用人工造浪(即其他船舶從附近經過)的方式來模擬較惡劣的海況。試驗結果見表1,補償前距離是運維船的船首與風電塔基的相對距離,補償后距離是登乘梯末端與風電塔基的相對距離,數據均通過系在末端的皮尺測量得到。由此可知,最大距離誤差在補償前為76.5cm,在補償后為23.2cm,小于成年人平均步長60cm的1/2,可滿足運維人員的安全輸送需求。
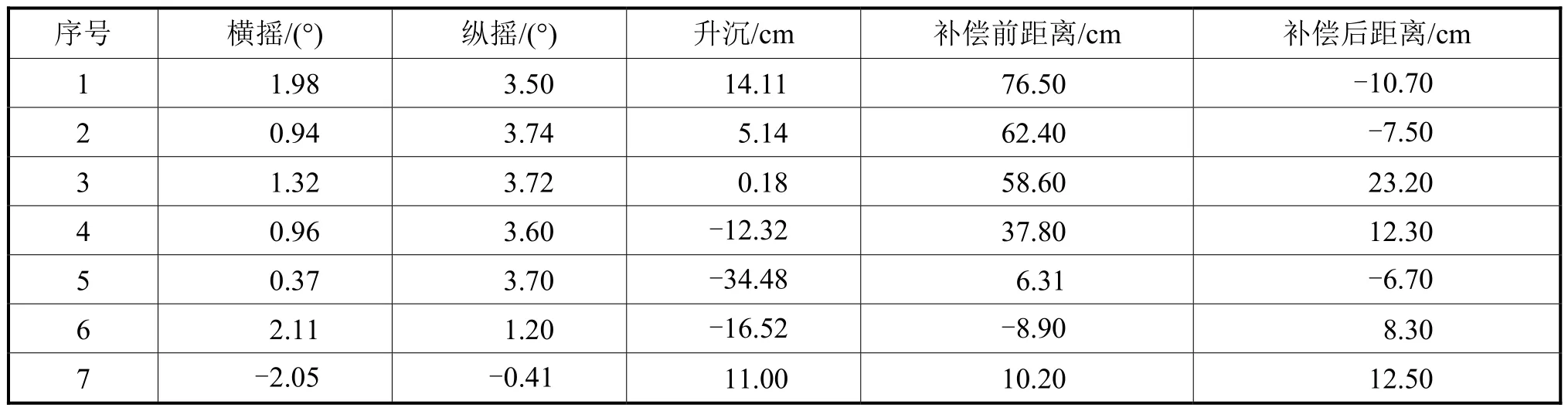
表1 登乘棧橋系泊試驗結果
對于補償后誤差,經過分析發現是由以下幾個方面的原因造成的:
1 ) 運動參考單元安裝后,其測量坐標系與棧橋坐標系有一定的偏差,由于成本原因,該項目選用的運動參考單元升沉精度較差,只有10cm;
2 ) 棧橋設計尺寸較大,不可避免地存在形變;
3 ) 液壓控制系統雖然選用了響應較快的伺服比例閥,但其在動作時仍存在一定的延時。
5 結 語
本文研發的登乘棧橋系統已完成碼頭系泊試驗,下一步將進行海試。該新型棧橋登靠系統通過數字信號處理器實現控制,利用液壓系統對船舶運行進行主動補償, 可降低登乘過程中登乘梯與風電塔的相對運動,提高轉移風電塔運維人員的安全性,對保證風電場正常運作有重要作用,具有廣泛的工程應用前景。
[1] 國家能源局.國家能源局關于海上風電項目進展有關情況的通報:國能新能(2015)343號[Z].
[2] 白玉,胡永攀.海上并靠補給波浪補償技術發展趨勢[J].船舶與海洋工程,2016, 32 (5): 1-4.
[3] 盧道華,高文超,王佳,等.主動波浪補償平臺及其試驗系統的設計與仿真[J].船舶工程,2015, 37 (11): 41-43.
[4] 魏素芬,楊文林,張竺英,等.液壓絞車主動升沉補償控制研究[J].液壓與氣動,2009 (7): 27-29.
[5] DO K D, PAN J.Nonlinear control of an active heave compensation system[J].Ocean Engineering,2005, 35 (5): 558-571.
An Active Wave Compensation Method for the Gangway of Wind Turbine Maintenance Vessel
SU Chang-qing,ZHENG Wen-bin,ZENG You-bing,DING De-fu
(Jiujiang Institute of Precision Measurement and Testing Technology, Jiujiang 332000, China)
This paper introduces a gangway designed with active compensation to meet the requirement of wind turbine maintenance in high seas.The structural design of the gangway is analyzed, and then the computational analysis of the compensation model is carried out.High speed digital signal processor is used as the core of the compensation control system which measures the real-time attitude and heave motions of the maintenance vessel with the motion reference unit, calculates the required stroke of the hydraulic cylinder according to the compensation model, and controls the hydraulic system to realize roll, pitch and heave compensation.It is in this way to maintain the relative distance between the end of the gangway and the base of the wind turbine, and to ensure the safe embarkation of the wind turbine maintainers.Mooring experiment of the maintenance vessel at the quay shows that the system can effectively compensate for the wave influence on the vessel, which well satisfies the embarkation requirement in high seas.
accessing gangway; accessing gangway system; active wave compensation; motion reference unit
U448.18
A
2095-4069 (2017) 04-0022-04
10.14056/j.cnki.naoe.2017.04.005
2017-04-11
蘇長青,男,工程師,1985年生。2006年畢業于西北工業大學,現主要從事慣性技術及海洋工程裝備的研究工作。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:08:26
艦船科學技術(2022年14期)2022-09-22 03:07:40
機械工業標準化與質量(2022年6期)2022-08-12 02:07:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30
