FY-4衛(wèi)星微振動抑制技術(shù)研究
2017-09-14 09:51:25董瑤海周徐斌申軍烽劉興天虞自飛
上海航天 2017年4期
董瑤海,周徐斌,申軍烽,劉興天,虞自飛
(1.上海航天技術(shù)研究院,上海 201109; 2.上海衛(wèi)星工程研究所,上海 201109)
FY-4衛(wèi)星微振動抑制技術(shù)研究
董瑤海1,周徐斌2,申軍烽2,劉興天2,虞自飛2
(1.上海航天技術(shù)研究院,上海 201109; 2.上海衛(wèi)星工程研究所,上海 201109)
根據(jù)裝載干涉式大氣垂直探測儀對微振動抑制的要求,對風(fēng)云四號(FY-4)衛(wèi)星的微振動抑制技術(shù)進(jìn)行了研究。通過統(tǒng)計(jì)星上振源,規(guī)劃整星級頻譜,研究微振動傳播機(jī)理,設(shè)計(jì)了振源隔離和載荷隔振的雙級隔振系統(tǒng)。給出了動量輪的隔振設(shè)計(jì),將動量輪的安裝支架由剛性變?yōu)榛诹羌?Hexapod)構(gòu)型的非線性變剛度柔性支架,隔離動量輪傳遞至衛(wèi)星平臺的振動干擾,從源頭控制振動。分析了發(fā)射段幅頻特性和在軌段隔振性能,結(jié)果表明試驗(yàn)結(jié)果與理論分析一致。在此基礎(chǔ)上,采用隔振組件和解鎖組件并聯(lián)使用方式,實(shí)現(xiàn)干涉式大氣垂直探測儀的二次隔振設(shè)計(jì),以進(jìn)一步抑制衛(wèi)星平臺傳遞至探測儀的微振動干擾。地面微振動試驗(yàn)和在軌微振動實(shí)測結(jié)果表明:隔振系統(tǒng)能使衛(wèi)星平臺傳遞至載荷安裝面的微振動量級控制在0.1×10-3g以下,滿足指標(biāo)要求。FY-4衛(wèi)星微振動抑制技術(shù)可為其他衛(wèi)星的微振動抑制提供參考。
風(fēng)云四號衛(wèi)星; 微振動; 隔振系統(tǒng); 非線性振動; 動量輪; 敏感載荷; 傳遞率; Hexapod結(jié)構(gòu)
0 引言
微振動是指衛(wèi)星在軌運(yùn)行期間,由活動部件(如動量輪、制冷機(jī)等)正常運(yùn)動造成的振動或振蕩,具幅值小、頻譜寬等特點(diǎn)[1]。FY-4衛(wèi)星裝載的干涉式大氣垂直探測儀(以下簡稱探測儀)為光譜類載荷,與通常的成像類衛(wèi)星不同,其正常工作時(shí)不僅需要物像間嚴(yán)格的對應(yīng)關(guān)系,而且要求確定光譜位置及干涉圖對比度的變化。
為減小平臺微振動對敏感載荷性能的影響,保證敏感載荷的微振動環(huán)境,常采取被動隔振措施對擾動源和敏感載荷進(jìn)行微振動隔離。被動隔振易隔離中高頻振動,且可靠性較高,在國內(nèi)外已被廣泛使用。在國外,對屬于干涉儀敏感載荷的哈勃太空望遠(yuǎn)鏡,以及大型結(jié)構(gòu)的微振動控制進(jìn)行了研究[2-5]。在國內(nèi),文獻(xiàn)[6]對近年來的衛(wèi)星微振動控制技術(shù)進(jìn)行了總結(jié)。文獻(xiàn)[7-12]對衛(wèi)星微振動隔離進(jìn)行了研究。雖然這些研究獲得了大量理論成果,但微振動抑制的工程應(yīng)用仍存在明顯不足,如未考慮主動段的過載、隔振系統(tǒng)的體積重量等限制條件等。本文對FY-4衛(wèi)星的微振動抑制技術(shù)進(jìn)行了研究。通過對星上振源的辨識,設(shè)計(jì)的動量輪微振動抑制系統(tǒng)能兼顧主動段和在軌段的振動隔離,并采用多級隔振設(shè)計(jì)以進(jìn)一步提高微振動抑制性能,在設(shè)計(jì)和工程應(yīng)用中有其新穎性。
1 FY-4衛(wèi)星微振動研究
微振動是一個(gè)復(fù)雜的系統(tǒng)性問題。在FY-4衛(wèi)星研制過程中開展了以下研究和攻關(guān)[13]。
a)統(tǒng)計(jì)星上振源,研究振源特性,識別微振動產(chǎn)生機(jī)理及頻譜成分,為星上主要振源產(chǎn)品的選配、驗(yàn)收、布局、減振提供依據(jù)。星上主要擾動為活動部件引起的振動響應(yīng),其振動信號在時(shí)域和頻域都實(shí)時(shí)反映了設(shè)備工作狀態(tài)信息。因此,了解和掌握活動部件的振動機(jī)理,對監(jiān)測部件運(yùn)行狀態(tài)和提高振動抑制的有效性有重要的理論意義和實(shí)際工程應(yīng)用價(jià)值。活動部件的振動產(chǎn)生機(jī)理有多種,主要包括不平衡、不對中、碰撞、摩擦、松動和吸附等。對不同的產(chǎn)品,以及同種產(chǎn)品不同的研制階段,其頻譜特性也會不完全一致,因此需對每個(gè)主要活動部件進(jìn)行振動測量及頻譜分析,以掌握其振動特性。
b)規(guī)劃整星級頻譜,有效避開探測儀動鏡模態(tài)頻率附近極其敏感的譜段和其他潛在的耦合共振因素。頻譜規(guī)劃首先需掌握敏感載荷對微振動的約束要求,如敏感載荷對微振動的敏感頻段及其對應(yīng)的振動量級。在此基礎(chǔ)上,根據(jù)星上振源的頻譜統(tǒng)計(jì),將各振源的頻譜特性在統(tǒng)一的坐標(biāo)系中表示,規(guī)劃出敏感載荷不受微振動干擾的安全區(qū)域及潛在的風(fēng)險(xiǎn)區(qū)域。針對風(fēng)險(xiǎn)區(qū)域,提出綜合的頻譜規(guī)避方案。
c)研究微振動在復(fù)雜星體內(nèi)傳播機(jī)理,識別微振動非線性傳遞特性和局部共振特性,為衛(wèi)星平臺微振動抑制設(shè)計(jì)提供依據(jù)。微振動傳遞特性的研究,直接影響微振動抑制系統(tǒng)設(shè)計(jì)、微振動仿真模型建立,以及響應(yīng)預(yù)估的正確性。因關(guān)于微振動傳遞特性的機(jī)理認(rèn)識不清,缺乏相關(guān)的理論支撐,故微振動傳遞特性研究一般以試驗(yàn)方法為主,初步掌握微振動在簡單結(jié)構(gòu)和復(fù)雜結(jié)構(gòu)中的傳遞規(guī)律。一般來說,衛(wèi)星平臺的非線性既包含剛度非線性又包含阻尼非線性,而剛度非線性遠(yuǎn)強(qiáng)于阻尼非線性。從主結(jié)構(gòu)傳遞特性來看,微振動從底板到頂板一般有近1個(gè)量級的衰減。
d)針對動量輪進(jìn)行隔振設(shè)計(jì),從源頭控制主振源傳遞至衛(wèi)星平臺的微振動干擾。
e)針對探測儀進(jìn)行二級隔振設(shè)計(jì),采用隔振組件和解鎖組件并聯(lián)方式,進(jìn)一步抑制衛(wèi)星平臺傳遞至探測儀的微振動干擾。
f)在探測儀內(nèi),采用對置雙活塞壓縮機(jī)并與主動平衡減振膨脹機(jī)分置的方式,有效抑制探測儀內(nèi)部的振動干擾。
g)搭載微振動測量系統(tǒng),實(shí)現(xiàn)衛(wèi)星主動段、變軌段、在軌段全程振動的測量,為載荷的微振動監(jiān)測、隔振效果評估,以及星上運(yùn)動部件故障診斷等提供依據(jù)。
2 動量輪隔振設(shè)計(jì)
動量輪作為星上的主要振動源,其引發(fā)的微振動會傳遞至載荷安裝界面,從而誘發(fā)探測儀動鏡傾斜或動鏡運(yùn)動系統(tǒng)共振,造成光程差超差,導(dǎo)致光譜圖無法反演或出現(xiàn)“鬼線”(如圖1所示),且難以通過技術(shù)手段進(jìn)行甄別或消除,其高頻頻率成分直接進(jìn)入分析光譜內(nèi),混淆真實(shí)譜線[14-15]。試驗(yàn)證明:在探測儀動鏡模態(tài)頻率附近,0.2×10-3g的微振動就會導(dǎo)致動鏡速度穩(wěn)定度失穩(wěn)和其光譜性能的明顯退化。
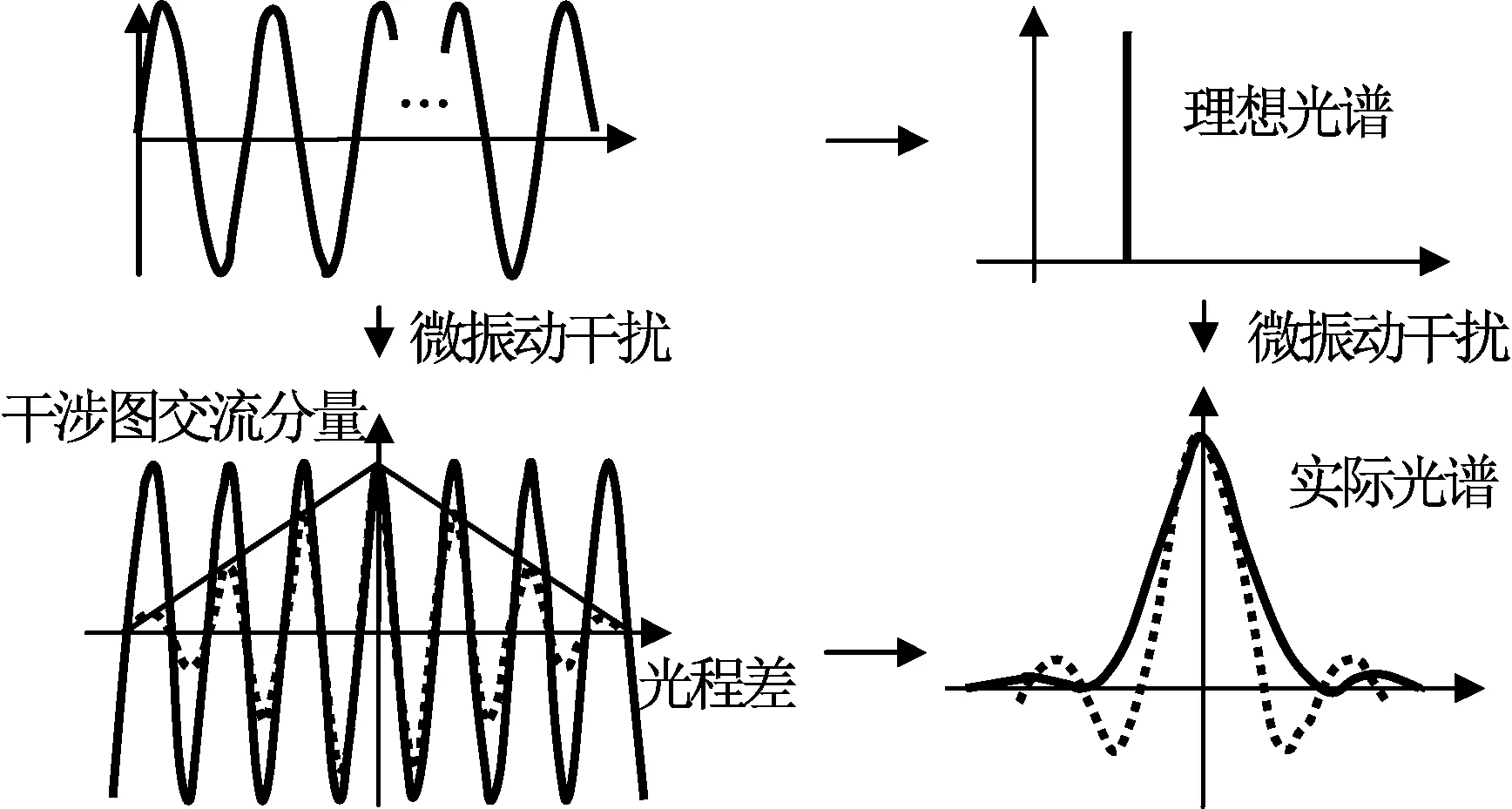
圖1 微振動對干涉光譜載荷影響Fig.1 Effect of micro-vibration on interferometric payload
對動量輪控制屬于從源頭進(jìn)行振動控制,常見的減振方法有吸振和隔振等[16-17]。對FY-4衛(wèi)星動量輪的隔離,首先應(yīng)保證通過發(fā)射段的振動影響,其次需保證在軌段的隔振性能。為在6個(gè)方向均有良好的隔振效果,要求隔振動系統(tǒng)具良好的解耦度,因此隔振支架整體上采用基于會聚式Hexapod構(gòu)型,使用微振動隔振裝置與非線性變剛度阻尼緩沖裝置并聯(lián)的設(shè)計(jì)方式,這樣同時(shí)兼顧發(fā)射段大量級振動、沖擊、過載等問題,以及在軌段微振動隔振需求。
2.1發(fā)射段幅頻特性分析
動量輪隔振支架本質(zhì)是一個(gè)非線性結(jié)構(gòu),其中的變剛度阻尼緩沖裝置原理如圖2(a)所示。圖2(a)中:Kf1,Kf2,Kvem分別為隔振器和阻尼單元的剛度;Gap為緩沖裝置中的間隙部分;Kbumper為緩沖裝置中的緩沖部分。含緩沖裝置的隔振器剛度曲線如圖2(b)所示,其中曲線呈折線變化,中間一段為緩沖裝置的小剛度區(qū),該剛度區(qū)主要由隔振裝置自身提供;兩側(cè)的剛度線為大剛度區(qū),該剛度由隔振裝置和緩沖裝置同時(shí)作用。圖2(b)中:d為緩沖剛度的位移;b為間隙距離;F為施加在緩沖裝置上的力。
在軌段是Kf1,Kf2,Kvem作用,發(fā)射段則主要是Kbumper作用。
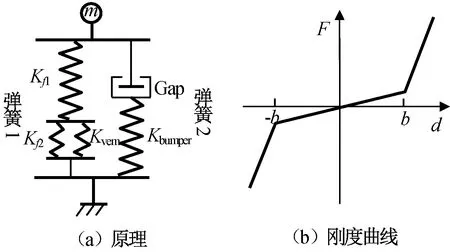
圖2 緩沖裝置Fig.2 Cushion structure
FY-4衛(wèi)星動量輪隔振支架可簡化為圖2所示的含間隙的彈簧質(zhì)量塊系統(tǒng)。設(shè)質(zhì)量塊的質(zhì)量為m,彈簧1的剛度為k1,質(zhì)量塊與彈簧2接觸后兩彈簧的總剛度為k2=k1+Kbumper,間隙寬度a0=b,則系統(tǒng)的剛度可用分段線性函數(shù)k(x)表示,有
(1)
列寫系統(tǒng)受迫振動的方程,定義(ω0)2=k1/m為系統(tǒng)的固有頻率,ε=(k2/k1)-1為未定義的參數(shù),ω為激勵頻率,ζ為系統(tǒng)阻尼比,a為系統(tǒng)的響應(yīng)。設(shè)as為系統(tǒng)的穩(wěn)態(tài)響應(yīng)幅值,ωF0=(ω0)2B,可得動量輪隔振支架非線性幅頻特性曲線如圖3所示。圖3(a)中:橫坐標(biāo)為激勵頻率與基本固有頻率之比;縱坐標(biāo)為系統(tǒng)的穩(wěn)態(tài)響應(yīng)幅值與間隙之比;黑色實(shí)線表示振動頻率與振幅的關(guān)系。圖3(b)中:幅頻曲線是以該振動頻率特征曲線為骨架的曲線族。由圖3可知:隨振動幅值輸入的增大,動量輪支架幅頻特性從線性逐漸表現(xiàn)為明顯的非線性“跳躍”特性(圖3(a)),與動量輪支架力學(xué)試驗(yàn)曲線的特征一致(圖3(b))。
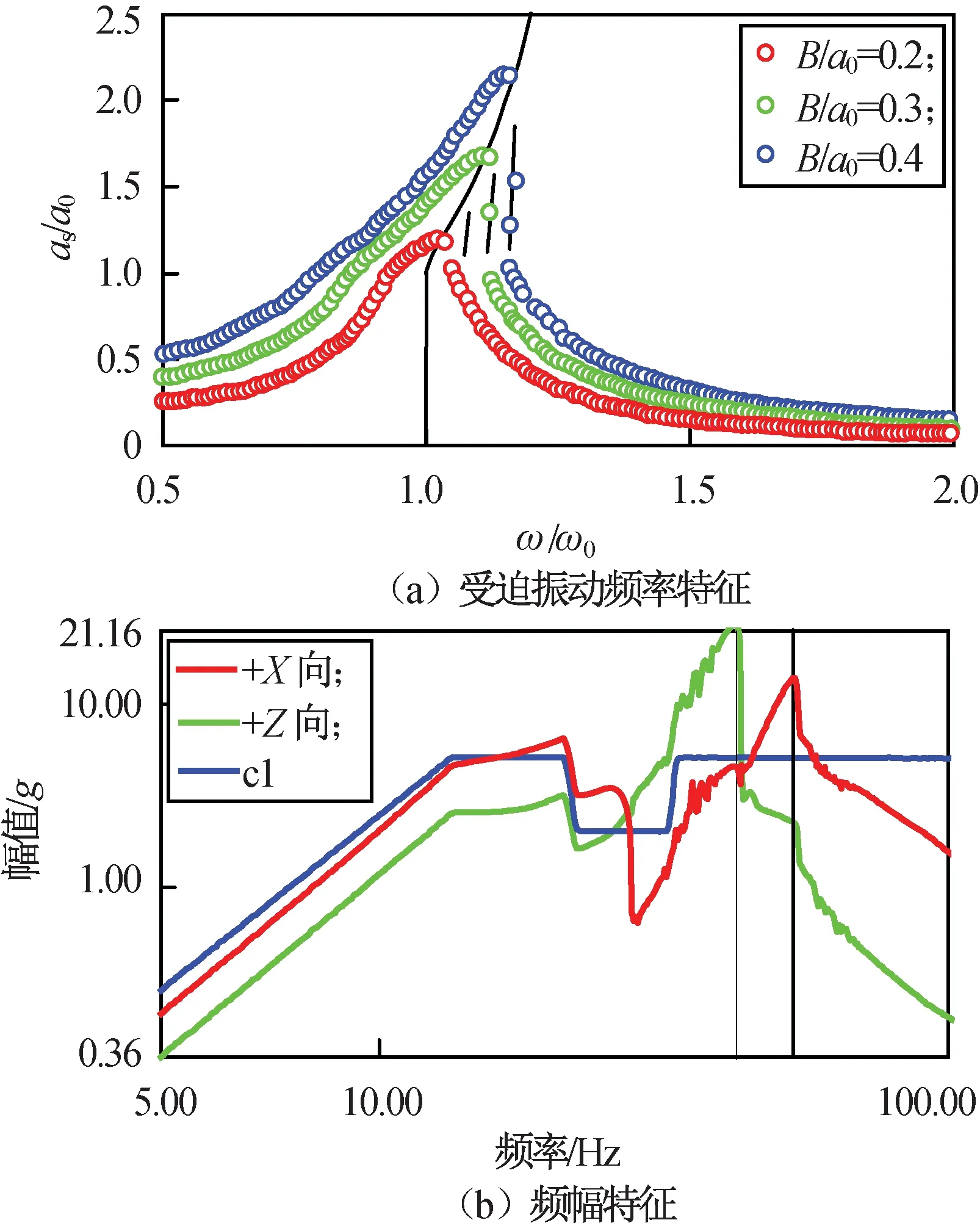
圖3 分段線性系統(tǒng)的受迫振動頻率特征與幅頻特性Fig.3 Frequency response characteristic of system with piesewise linearity
2.2在軌段隔振性能分析
在軌段,動量輪支架可簡化為基于Hexapod平臺的6個(gè)微振動隔振裝置并聯(lián)組成的隔振系統(tǒng),原理如圖4所示。
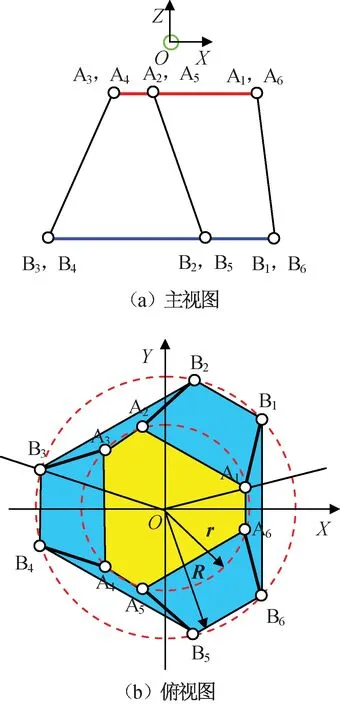
圖4 隔振系統(tǒng)Fig.4 Designed vibration isolation system
設(shè)等價(jià)安裝點(diǎn)為全局坐標(biāo)系原點(diǎn)O,坐標(biāo)軸為OX,OY,OZ;真實(shí)連接處的局部坐標(biāo)系原點(diǎn)為Oi(i=1,2,…,6),坐標(biāo)軸為OXi,OYi,OZi。令點(diǎn)O至點(diǎn)Oi的位置矢量為ri。全局坐標(biāo)系變換至隔振器i所在局部坐標(biāo)系的坐標(biāo)軸方向需經(jīng)過坐標(biāo)變換。若被隔振物體的質(zhì)量陣為M,則建立動量輪隔振支架動力學(xué)方程為
(2)
根據(jù)動量輪隔振支架的動力學(xué)方程,可分析被隔對象質(zhì)心高度,隔振器分布半徑、夾角、安裝傾角、投影夾角和剛度比系數(shù)對帶寬及系統(tǒng)帶寬的影響,并根據(jù)仿真分析結(jié)果優(yōu)化這些系統(tǒng)參數(shù),使隔振支架的綜合性能達(dá)到最優(yōu)。仿真分析表明:針對頻率40 Hz以上的動量輪激勵,理論上動量輪隔振支架的隔振效率大于80%。
對設(shè)計(jì)的FY-4衛(wèi)星動量輪支架進(jìn)行傳遞率試驗(yàn),結(jié)果如圖5所示。
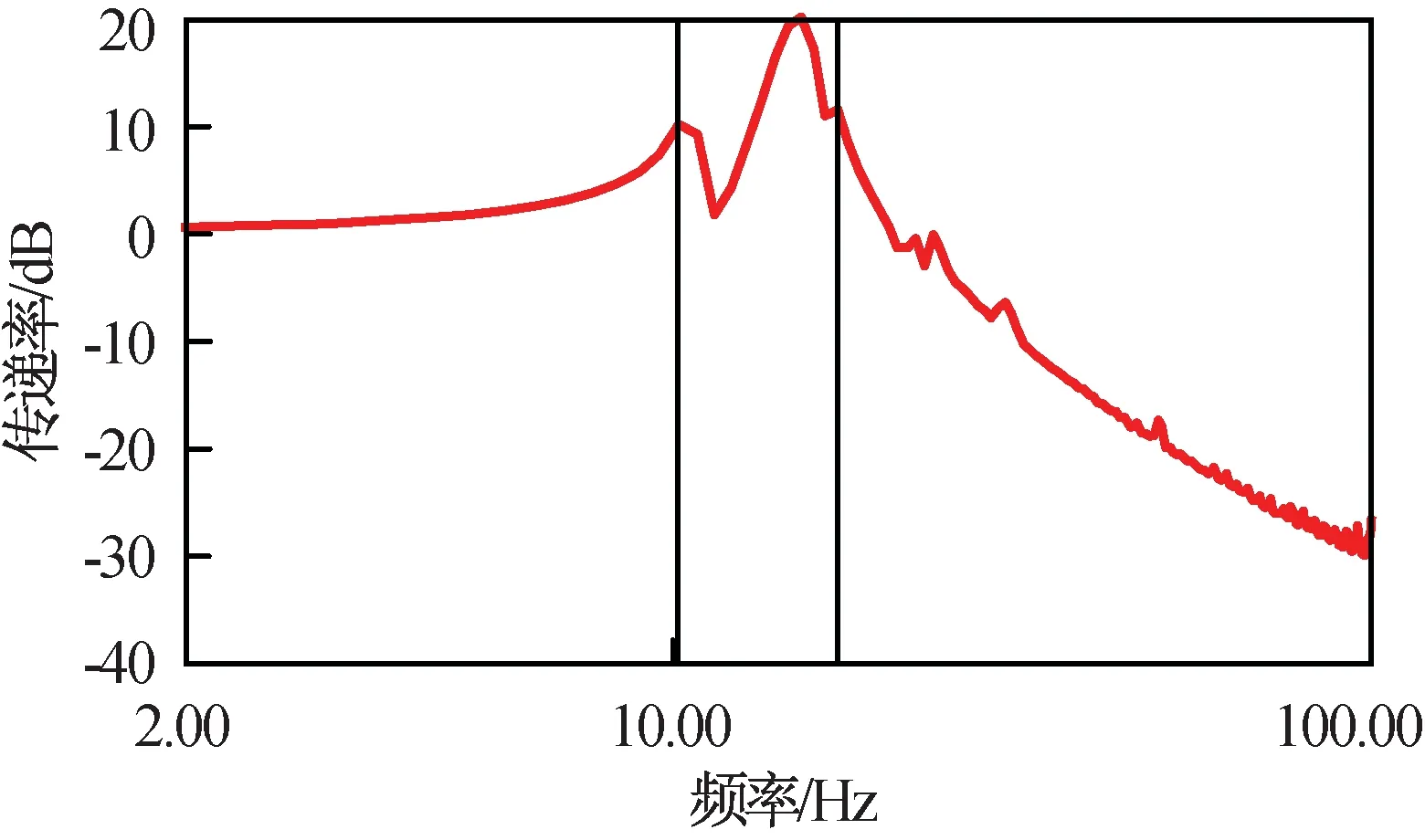
圖5 動量輪支架傳遞函數(shù)Fig.5 Frequency response function of flywheel micro-vibration isolation chassis
試驗(yàn)表明:在頻率40~50 Hz范圍內(nèi)動量輪支架最低減振效率為71.8%;在頻率50~60 Hz范圍內(nèi)最低減振效率為77.6%;在頻率60~100 Hz范圍內(nèi)最低減振效率為88.1%,由此可知試驗(yàn)結(jié)果與理論分析的一致性良好。
對動量輪這類的主振源進(jìn)行微振動抑制是較直接的控制措施,但動量輪作為姿軌控分系統(tǒng)的主要執(zhí)行部件,隔振設(shè)計(jì)稍有不當(dāng)將直接影響衛(wèi)星的控制姿態(tài)。因此,在對動量輪進(jìn)行隔振設(shè)計(jì)時(shí)不僅需考慮隔振指標(biāo),而且要考慮各分系統(tǒng)的指標(biāo)要求。
3 探測儀隔振設(shè)計(jì)
3.1隔振系統(tǒng)工作原理
探測儀隔振系統(tǒng)主要由柔性隔振單元3個(gè)和剛性固支單元5個(gè)構(gòu)成,其構(gòu)成和工作流程如圖6所示。剛性固支單元在主動段起承載作用。入軌后,根據(jù)實(shí)際情況選擇是否解鎖釋放。釋放后,柔性隔振單元將探測儀彈起1~2 mm的距離,隔振系統(tǒng)開始起振動隔離作用。
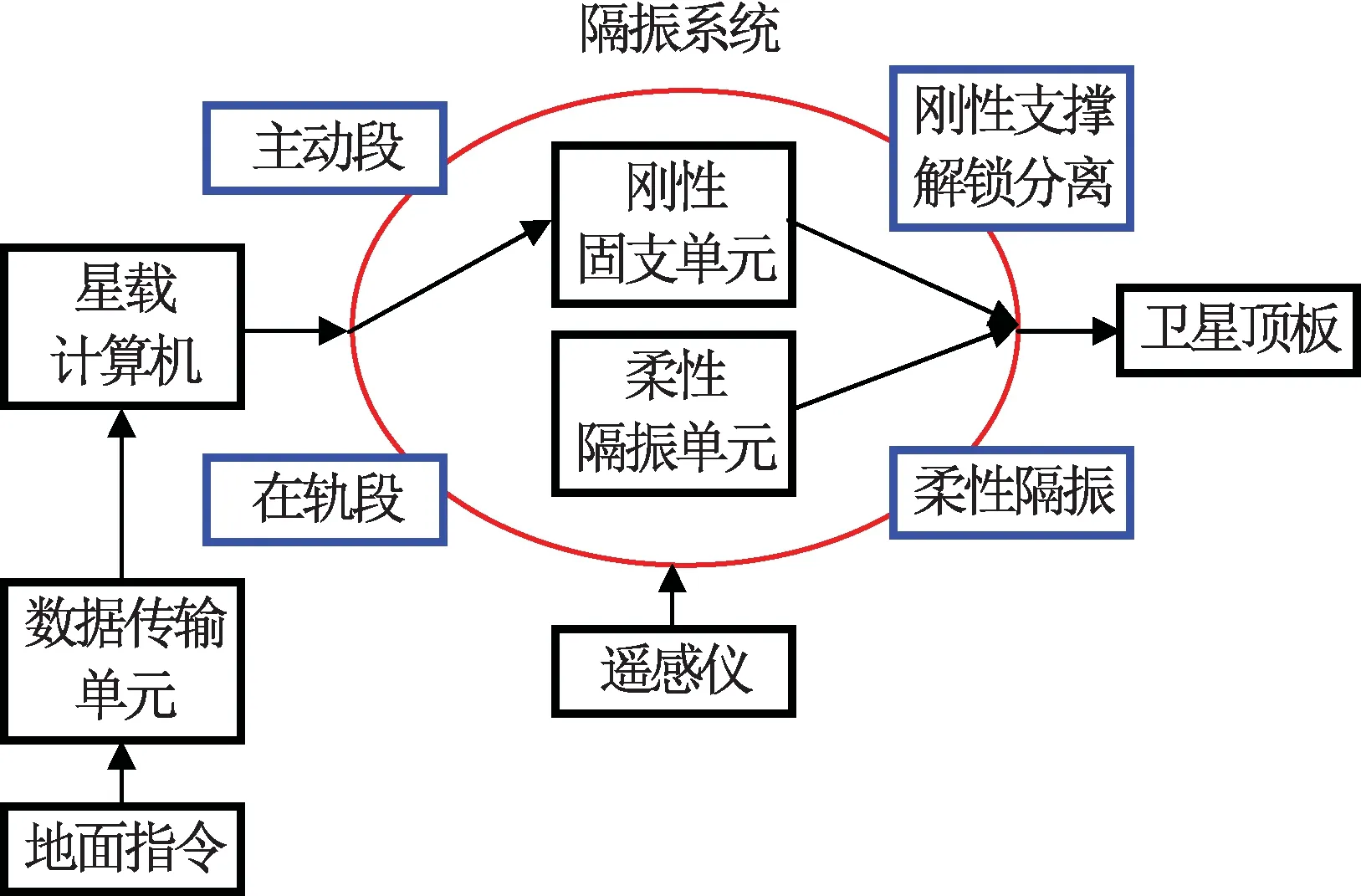
圖6 隔振系統(tǒng)組成和工作流程Fig.6 System composition and function flow of vibration isolation system
3.2隔振系統(tǒng)優(yōu)化設(shè)計(jì)
根據(jù)輸入條件及頂板上的布局,設(shè)置柔性隔振單元為3個(gè),呈120°均勻分布的布局形式[18]。隔振單元布局范圍為509.3~1 200 mm,初始設(shè)定Z向隔振頻率約14 Hz,Z向壓縮量約1.27 mm。在以上條件的基礎(chǔ)上尋找合適的橫向剛度、隔振單元的支撐角度,以及安裝位置,以實(shí)現(xiàn)隔振系統(tǒng)頻帶較低和系統(tǒng)解耦性較好的設(shè)計(jì)目標(biāo)。
根據(jù)隔振系統(tǒng)動力學(xué)方程,用引入能量法,依據(jù)隔振系統(tǒng)各階模態(tài)的參與程度判斷系統(tǒng)的耦合程度[19]。設(shè)橫向/軸向的剛度的比值為u,其變化范圍為0.2~2.0(根據(jù)工程能實(shí)現(xiàn)及實(shí)際使用的因素綜合考慮),隔振單元安裝傾角變化為0°~90°。分析橫向剛度和柔性單元傾角變化對帶寬及系統(tǒng)最低頻率的影響,結(jié)果分別如圖7~10所示。
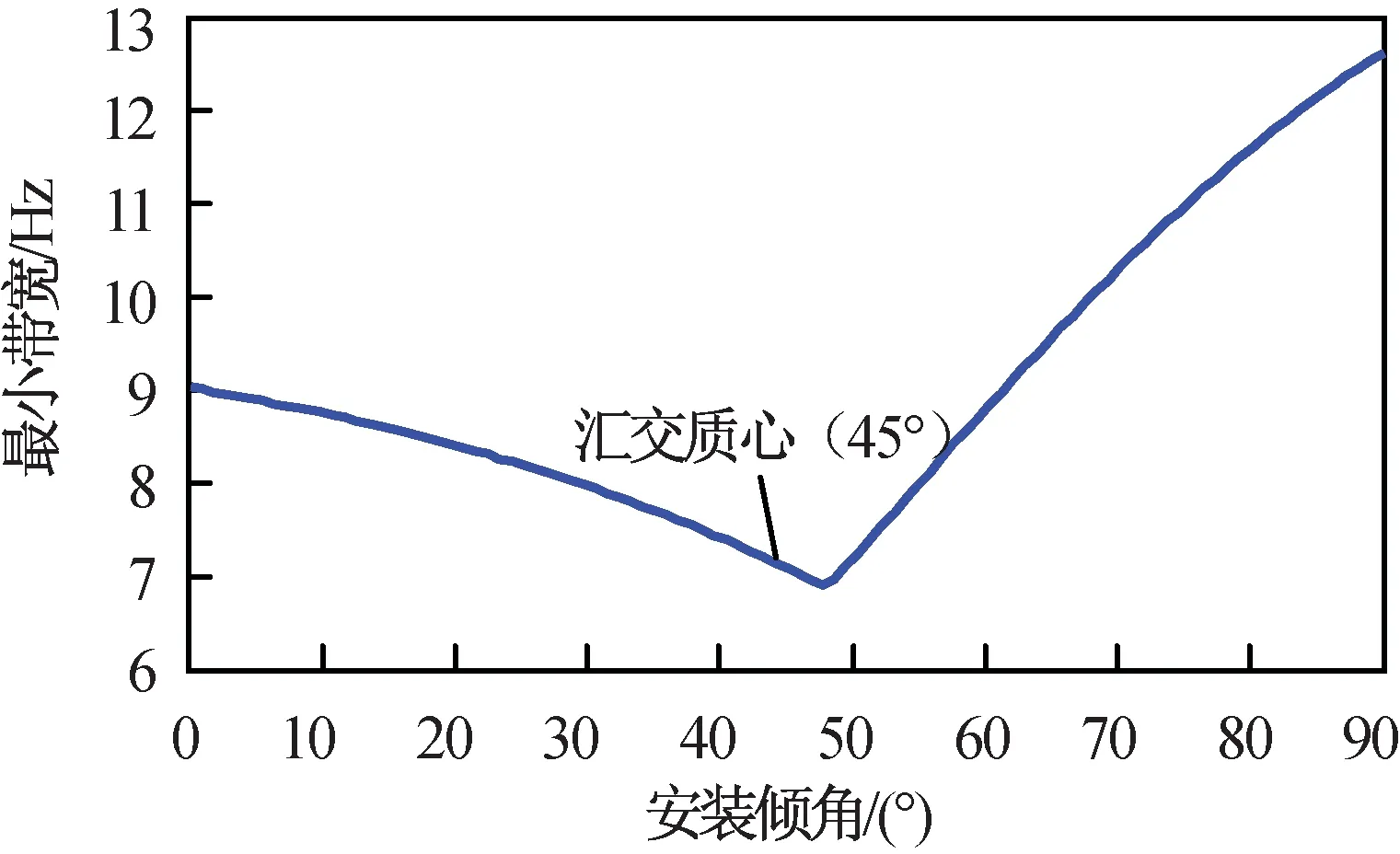
圖7 隔振系統(tǒng)最小帶寬與安裝傾角關(guān)系Fig.7 Relationship between minimum bandwidth and inclination angle of vibration isolation system
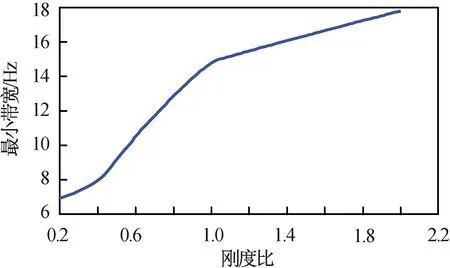
圖8 隔振系統(tǒng)最小帶寬與橫/軸剛度比關(guān)系Fig.8 Relationship between minimum bandwidth and ratio of lateral and translational stiffness of vibration isolation system
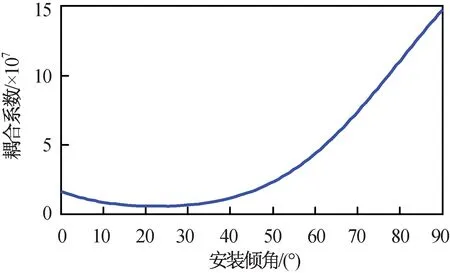
圖9 隔振系統(tǒng)耦合系數(shù)與安裝傾角關(guān)系Fig.9 Relationship between coupling coefficient and inclination angle of vibration isolation system
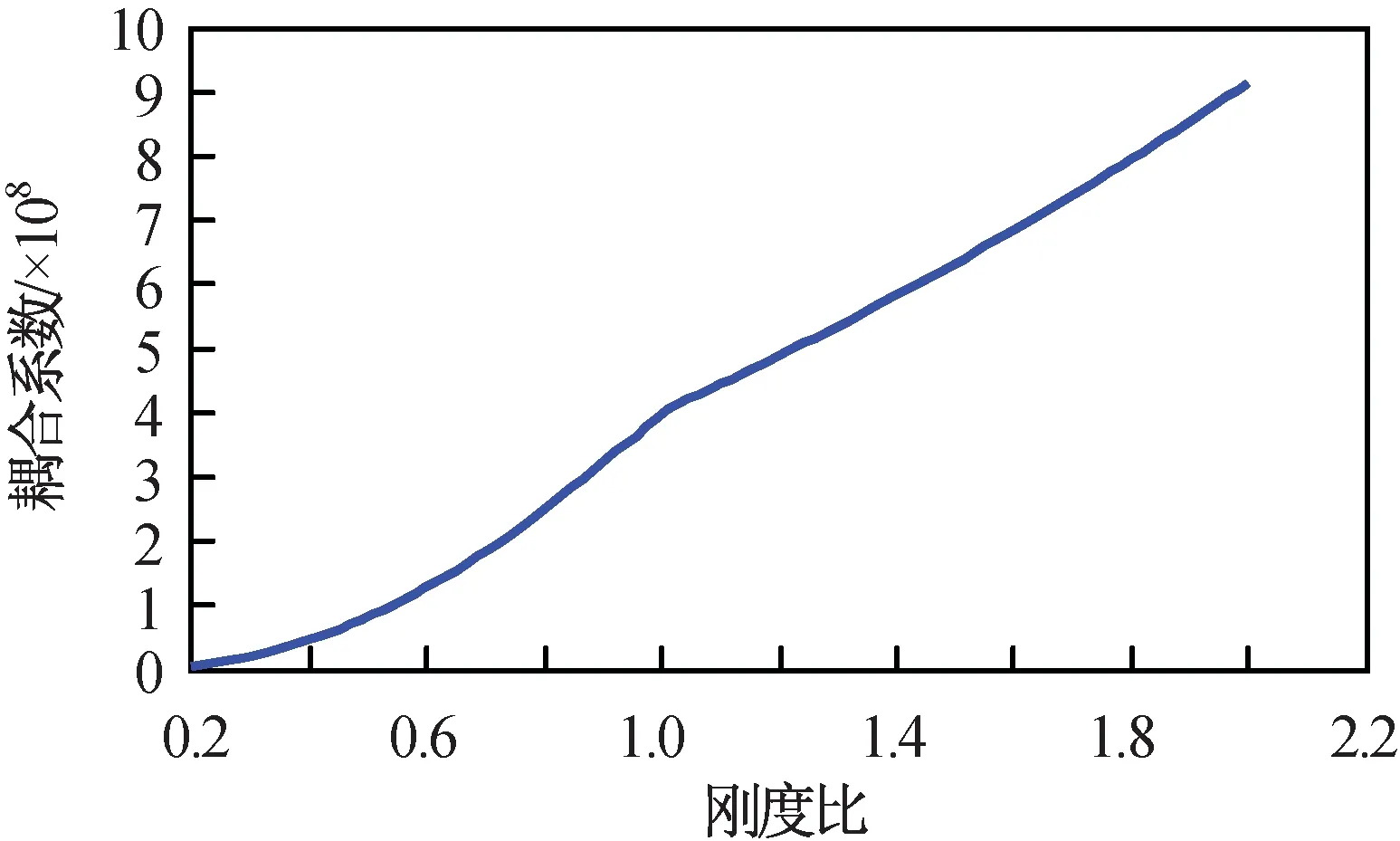
圖10 隔振系統(tǒng)耦合系數(shù)與橫/軸剛度比關(guān)系Fig.10 Relationship between coupling coefficient and ratio of lateral and translational stiffness of vibration isolation system
由圖7~10可知:u與隔振系統(tǒng)的頻帶寬度成正向關(guān)系,但實(shí)際應(yīng)用u也不宜過小,否則隔振系統(tǒng)固有頻率過小,隔振器強(qiáng)度降低,合適的取值范圍為0.4~0.8;豎直安裝(安裝傾角0°)時(shí)耦合性差異較小,安裝傾角22°時(shí)耦合性最小,過質(zhì)心耦合性差異亦較小;u對耦合性的影響大于傾角,u越小耦合性越小;隔振單元傾斜安裝的耦合性能雖好,但考慮工程中設(shè)計(jì)、裝配等因素,其實(shí)際優(yōu)勢不明顯。因此,實(shí)際應(yīng)用中,選擇隔振單元豎直放置(適應(yīng)性更廣,無需過渡連接塊,減少系統(tǒng)重量),u的取值范圍為0.4~0.8(1.0以下),以在工程應(yīng)用中取得較高的綜合性能。
對隔振系統(tǒng)振動抑制性能的分析,較合理的方式是將隔振系統(tǒng)引入整星微振動仿真模型,分析在軌狀態(tài)的隔振性能[20]。其中,隔振系統(tǒng)的建模涉及隔振器的剛度矩陣、阻尼特性,以及隔振器組合后的系統(tǒng)特性,仿真輸入加速度18×10-3g的寬頻信號激勵,隔振前后的仿真結(jié)果如圖11所示。分析結(jié)果表明:在寬頻隨機(jī)信號激勵和特定的危險(xiǎn)頻率信號激勵兩種工況下,隔振系統(tǒng)的隔振效率均大于95%,隔振效果非常明顯。
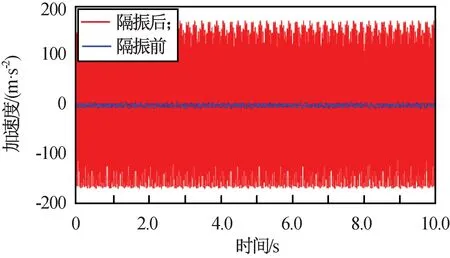
圖11 隔振系統(tǒng)隔振前后對比Fig.11 Performance of vibration isolation system
綜上,F(xiàn)Y-4衛(wèi)星采用隔振器豎直放置、3隔振器并聯(lián)組成的隔振系統(tǒng),隔振效果明顯,滿足設(shè)計(jì)要求。由此可知:在對動量輪這類主振源隔振的基礎(chǔ)上,再次對載荷進(jìn)行微振動隔離是作為星上微振動抑制的備份措施,若衛(wèi)星入軌后,星上仍存在其他的振動干擾影響載荷,則可啟用載荷的隔振系統(tǒng),確保載荷的主要性能指標(biāo)。
4 整星微振動試驗(yàn)
為考核微振動抑制系統(tǒng)的性能,對FY-4衛(wèi)星進(jìn)行了整星微振動試驗(yàn),試驗(yàn)包括地面試驗(yàn)和在軌試驗(yàn)。地面試驗(yàn)采用近零剛度懸吊系統(tǒng)模擬失重環(huán)境,采用在軌飛行模式模擬星上各轉(zhuǎn)動部件運(yùn)轉(zhuǎn),測試關(guān)注點(diǎn)的加速度響應(yīng)。在軌試驗(yàn)主要通過在軌微振動測試系統(tǒng)測試在軌微振動響應(yīng),下傳至地面進(jìn)行微振動分析。
4.1地面微振動試驗(yàn)
微振動地面試驗(yàn)環(huán)境需解決環(huán)境干擾和在軌失重環(huán)境模擬等問題。環(huán)境干擾主要是地面振動對測量結(jié)果的影響,以及空氣和電磁環(huán)境對測量系統(tǒng)的影響,主要措施包括對地基進(jìn)行隔振設(shè)計(jì)、對試驗(yàn)環(huán)境進(jìn)行屏蔽(避免噪聲和空氣流動造成的影響)等;在軌失重環(huán)境主要是指模擬自由邊界條件問題,一般需要近零剛度懸吊系統(tǒng)。
FY-4衛(wèi)星微振動試驗(yàn)過程中,環(huán)境振動干擾≤1.0×10-5g;懸吊系統(tǒng)垂向基頻0.22 Hz,橫向基頻0.17 Hz,滿足整星微振動試驗(yàn)所需的環(huán)境要求。
取其極端惡劣工況,6個(gè)動量輪由0 r/min同步加速至5 000 r/min,比較動量輪支架隔振前后的振動響應(yīng)可得隔振支架自身的性能特性,結(jié)果如圖12、13所示。
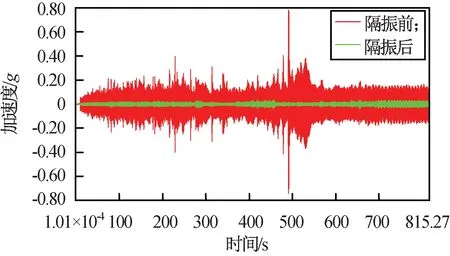
圖12 動量輪支架隔振前后時(shí)域響應(yīng)對比Fig.12 Time history of tested vibration with and without flywheel vibraiton isolation system
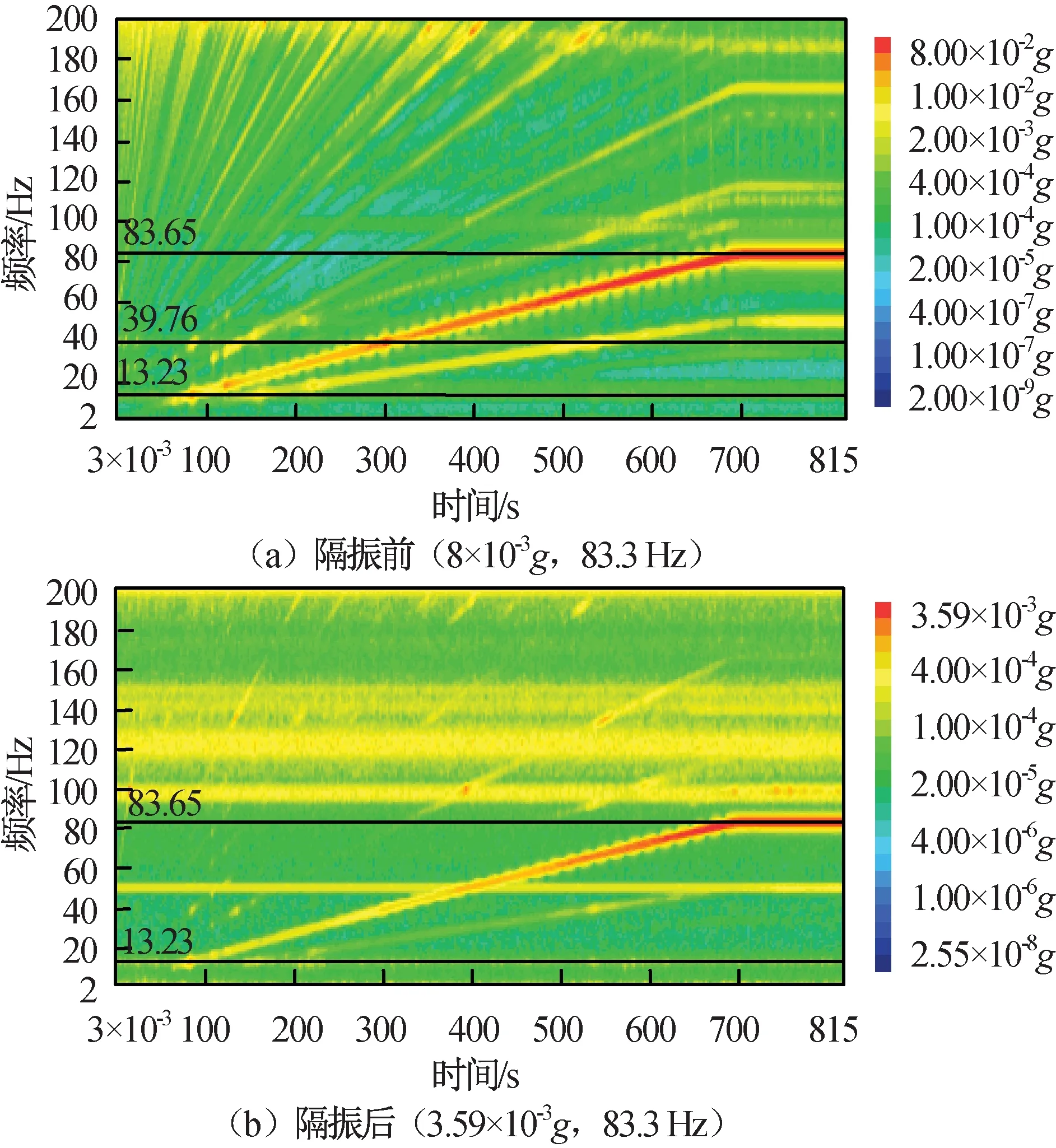
圖13 動量輪支架隔振前后頻域響應(yīng)對比Fig.13 Tested vibration in frequency domain with and without flywheel vibration isolation system
在6個(gè)動量輪加速過程中,敏感載荷探測儀安裝面的振動響應(yīng)如圖14所示。
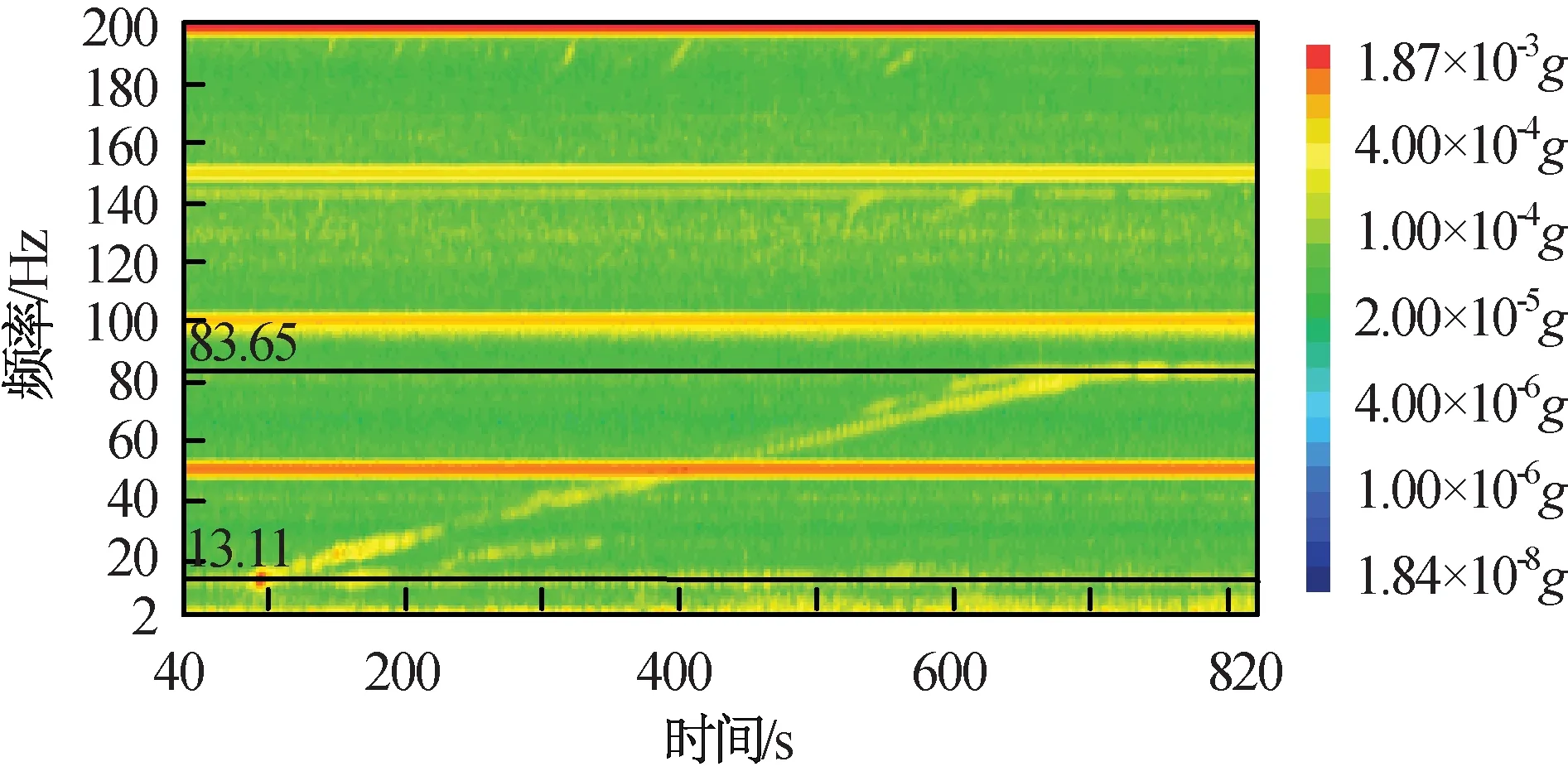
圖14 探測儀安裝面最大響應(yīng)Fig.14 Maximum vibration on payload installation platform
由圖12~14可知:動量輪隔振支架在中高頻段的減振效率大于75%,符合設(shè)計(jì)指標(biāo);探測儀安裝面響應(yīng)1×10-3g~3×10-3g,發(fā)生在50,100,150 Hz等頻點(diǎn),該頻點(diǎn)是探測儀制冷機(jī)的工作頻率及其倍頻成分,除去制冷機(jī)的振動干擾,衛(wèi)星平臺傳遞至載荷的微振動干擾為0.1×10-3g~0.2×10-3g。
同時(shí),根據(jù)載荷的測試數(shù)據(jù)表明,相關(guān)技術(shù)指標(biāo)與其在實(shí)驗(yàn)室環(huán)境中的測量指標(biāo)一致,說明星上微振動環(huán)境滿足載荷的指標(biāo)要求。
4.2在軌微振動測量
FY-4首發(fā)星于2016年12月11日0:11在西昌衛(wèi)星發(fā)射中心發(fā)射升空,至2016年12月17日17:17完成5次變軌和定點(diǎn)捕獲,精確定點(diǎn)至東經(jīng)99.5°;2017年3月9日完成了在軌段微振動測量和數(shù)據(jù)下傳,如圖15~16所示。
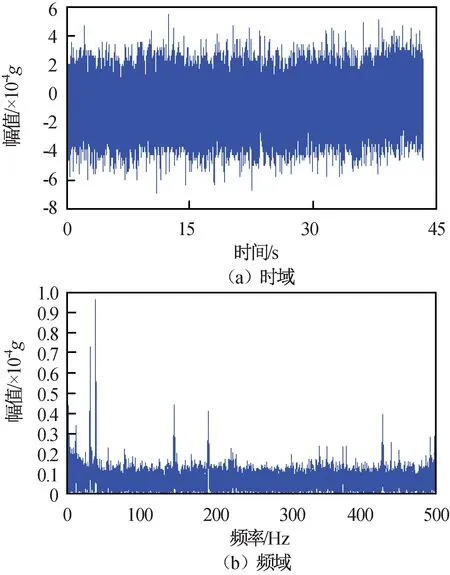
圖15 探測儀制冷機(jī)未開時(shí)衛(wèi)星頂板 載荷界面處微振動響應(yīng)Fig.15 Vibration on top plate for payload installed with cryocooler powered off
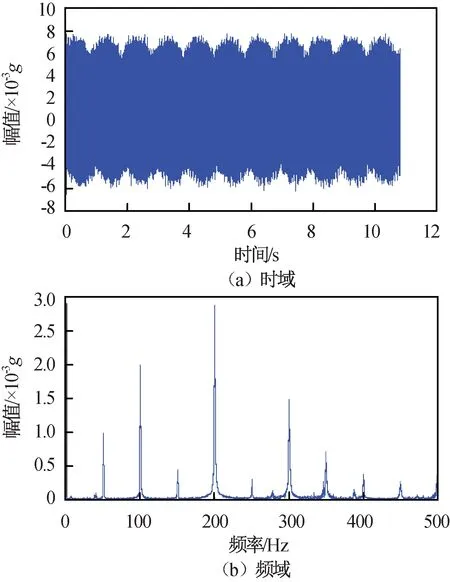
圖16 探測儀制冷機(jī)開機(jī)后衛(wèi)星頂板 載荷界面處微振動響應(yīng)Fig.16 Vibration on top plate for payload installed with cryocooler powered on
分析在軌段工況(4個(gè)動量輪轉(zhuǎn)速分布在約30 Hz)的數(shù)據(jù),可發(fā)現(xiàn)在200 Hz范圍內(nèi),探測儀制冷機(jī)關(guān)機(jī)時(shí)衛(wèi)星頂板的振動響應(yīng)小于0.1×10-3g(動量輪工頻);探測儀制冷機(jī)開機(jī)后,衛(wèi)星頂板的振動響應(yīng)為1×10-3g~3×10-3g,發(fā)生在50,100,150 Hz等制冷機(jī)的工頻及其倍頻處。在軌測量結(jié)果與正樣星整星微振動試驗(yàn)的近似工況(6個(gè)動量輪同步加速至5 000 r/min)測量結(jié)果一致。載荷在軌實(shí)測表明:相關(guān)技術(shù)指標(biāo)與其在實(shí)驗(yàn)室環(huán)境中的測量指標(biāo)一致,說明FY-4首發(fā)星上微振動環(huán)境滿足載荷的指標(biāo)要求。
綜上,F(xiàn)Y-4首發(fā)星采用的微振動抑制措施有效,微振動在軌測量系統(tǒng)工作正常,測量結(jié)果可信。
5 結(jié)束語
本文針對FY-4衛(wèi)星微振動抑制的要求,提出了振源隔離和載荷隔振的雙級隔振系統(tǒng)設(shè)計(jì)方法,完成了隔振系統(tǒng)的研制。地面微振動試驗(yàn)和在軌飛行測試結(jié)果表明:隔振系統(tǒng)能使衛(wèi)星平臺傳遞至安裝面的微振動量級控制在低于0.1×10-3g,滿足了指標(biāo)要求。后續(xù),針對FY-4衛(wèi)星8年以上的設(shè)計(jì)壽命,需進(jìn)一步開展動量輪隔振支架可靠性增長的研究。FY-4衛(wèi)星微振動抑制技術(shù)可為相關(guān)衛(wèi)星的微振動抑制提供借鑒和參考。
[1] 董瑤海. 航天器微振動——理論與實(shí)踐[M]. 北京: 中國宇航出版社, 2015: 1-3.
[2] BRONOWICKI A, MACDONALD R, GURSEL Y, et al. Dual-stage vibration isolation for Optical Interferometer Missions[J]. Proc SPIE, Astronomical Telescopes & Instrumentation, 2002, 4852-68: 753-763.
[3] DAVIS L P, WILSON J F, JEWELL R E, et al. Hubble Space Telescope reaction wheel assembly vibration isolation system[R]. NASA N87-22702,1986.
[4] BRONOWICKI A. A layered vibration control strategy for space telescopes[C]// Smart Structures and Materials Conference 2003: Smart Structures and Integrated Systems. Bellingham: SPIE, 2003: 5056, 487-496.
[5] BRONOWICKI A. Active vibration control of large optical space structures[J]. Smart Materials and Structures, 1999, 8(6): 740-752.
[6] 孟光. 周徐斌. 衛(wèi)星微振動及控制技術(shù)進(jìn)展[J]. 航空學(xué)報(bào), 2015, 36(8): 2609-2619.
[7] 楊劍鋒. 空間光學(xué)載荷微振動關(guān)鍵技術(shù)研究[D]. 長春: 中國科學(xué)院研究生院(長春光學(xué)精密機(jī)械與物理研究所), 2016.
[8] 劉興天, 鄭京良, 申軍烽. 隔振器安裝位置對衛(wèi)星載荷隔振性能的影響研究[J]. 上海航天, 2016, 33(6): 67-71.
[9] 譚天樂, 朱春艷, 朱東方, 等. 航天器微振動測試、隔離、抑制技術(shù)綜述[J]. 上海航天, 2014, 31(6): 36-45+51.
[10] 龐世偉, 潘騰, 毛一嵐, 等. 某型號衛(wèi)星微振動試驗(yàn)研究及驗(yàn)證[J]. 航天器環(huán)境工程, 2016, 33(3): 305-311.
[11] ZHOU W D, LI D X, Design and analysis of an intelligent vibration isolation platform for reaction/momentum wheel assemblies[J]. Journal of Sound and Vibration, 2012, 331: 2984-3005.
[12] HUANG X C, SUN J Y, HUA H X, et al. Modeling and optimization of octostrut vibration isolation platform by FRF-based substructuring method[J]. ASCE Journal of Aerospace Engineering, 2015, 28: 3.
[13] 董瑤海. 風(fēng)云四號氣象衛(wèi)星及其應(yīng)用展望[J]. 上海航天, 2016, 33(2): 1-8.
[14] EYERMAN C E, SHEA J F. A systems engineering approach to disturbance minimization for spacecraft utilizing controlled structures technology[R]. MIT SERC Report#2-90, Massachusetts Institute of Technology: MIT Space Engineering Research Center, 1990.
[15] MELODY J W. Discrete-frequency and broadband reaction wheel disturbance models[R]. Interoffice Memorandum 3411-95-200csi, La Canada Flintridge: Jet Propulsion Laboratory, 1995.
[16] 石新宇, 周徐斌, 申軍烽, 等. 航天器電磁變頻吸振器性能分析與測試[J]. 噪聲與振動控制, 2015, 35(5): 60-64.
[17] 虞自飛, 周徐斌, 申軍烽. 衛(wèi)星動量輪隔振與吸振聯(lián)合減振系統(tǒng)設(shè)計(jì)[C]// 中國空間科學(xué)學(xué)會2013年空間光學(xué)與機(jī)電技術(shù)研討會. 西安: 中國空間科學(xué)學(xué)會, 2013: 241-246.
[18] 申軍烽, 杜勝, 周徐斌, 等. 高精度光學(xué)有效載荷微振動隔振系統(tǒng)設(shè)計(jì)與分析[C]// 2011年全國機(jī)械動力學(xué)學(xué)術(shù)大會. 杭州: 中國振動工程學(xué)會機(jī)械動力學(xué)專業(yè)委員會, 2011: 124-129.
[19] 申軍烽, 周徐斌, 薛景賽, 等. 彈性元件剛度特性對隔振系統(tǒng)解耦度的影響分析[C]// 中國宇航學(xué)會飛行器總體專業(yè)委員會第12屆學(xué)術(shù)研討會. 延吉: 中國宇航學(xué)會, 2012: 436-440.
[20] 蔣國偉, 周徐斌, 申軍烽, 等. 衛(wèi)星微振動虛擬仿真技術(shù)研究及應(yīng)用[J]. 計(jì)算機(jī)測量與控制, 2011, 19(9): 2206-2209.
StudyonMicro-VibrationSuppressionTechnologyofFY-4Satellite
DONGYao-hai1,ZHOUXu-bin2,SHENJun-feng2,LIUXing-tian2,YUZi-fei2
(1. Shanghai Academy of Spaceflight Technology, Shanghai201109, China;2. Shanghai Institute of Satellite Engineering, Shanghai201109, China)
According to the requirement of micro-vibration source isolation for interferometer detector, the micro-vibration suppression was studied for FY-4meteorological satellite in this paper. The two level micro-vibration isolation system which composed of vibration source and sensitive payload isolation devices was designed by onboard vibration source statistics, the spectrum planning on the whole satellite level and the mechanism research of micro-vibration propagation. The vibration isolation was designed for reaction wheel. The vibration isolation device was designed based on the Hexapod configuration, the vibration from source hence be controlled as the vibration transferring into the satellite platform was weakened. The characteristics of amplitude-frequency in active phase and the performances of vibration isolation in orbit were analyzed. The results showed that the experiment results were well agreed with the simulation results. For the sensitive payload vibration isolation, the interferometer detector was isolated by isolators installed between the satellite top plate and the payload. The micro-vibration isolation experiments conducted both on ground and in orbit show that the two level vibration isolation system can effectively reduce the vibration transmitted into the payload and the vibration level is controlled at0.1×10-3gand below which satisfies the application requirement of FY-4satellite. The micro-vibration isolation technology of FY-4satellite has significance value and can also be used in other similar satellites.
FY-4meteorological satellite; micro vibration; vibration isolation system; nonlinear vibration; reaction wheel assembly; sensitive payload; transmissibility; Hexapod structure
1006-1630(2017)04-0020-08
2017-06-08;
:2017-06-30
國家自然科學(xué)基金資助(51505294);上海市科委項(xiàng)目資助(14XD1423000)
董瑤海(1966—),男,研究員,F(xiàn)Y-4氣象衛(wèi)星總設(shè)計(jì)師,新世紀(jì)百千萬人才工程國家級人選,享受國務(wù)院政府特殊津貼,主要研究方向?yàn)樾l(wèi)星總體、測試和控制。
P414.4;V414.5
:ADOI:10.19328/j.cnki.1006-1630.2017.04.003
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
保健醫(yī)苑(2022年5期)2022-06-10 07:46:12
小哥白尼(趣味科學(xué))(2021年8期)2021-11-20 06:08:04
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
模具制造(2019年3期)2019-06-06 02:10:54
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
