基于雙總線的FY-4衛星測控數管分系統及應用
2017-09-14 09:52:35范穎婷朱振華王軍旗
上海航天 2017年4期
范穎婷,朱振華,王 震,顧 強,王軍旗,閆 奎
(上海衛星工程研究所,上海 201109)
基于雙總線的FY-4衛星測控數管分系統及應用
范穎婷,朱振華,王 震,顧 強,王軍旗,閆 奎
(上海衛星工程研究所,上海 201109)
介紹了風云四號(FY-4)衛星測控數管分系統特點及其應用。給出了測控數管分系統的組成和工作流程。采用CCSDS協議分包遙測,提出了虛擬信道遙測包調度策略、遙測包傳輸靈活配置策略、高精度高頻可編程遙測,以及境外遙測全程采集4種分包遙測優化方法,實現了自主動態遙測采集和下傳、在軌遙測異常排查、重點遙測波道高精度高頻采樣、衛星發射至定點過程的遙測盲區消除。分包遙控采用遙控數據優先級選擇策略,保證了遙控與程控指令同時輸出,實現了衛星發射至定點全過程的程控管理功能。設計了部件級和整星級故障管理策略,對部件級故障具備一定自主管理功能,其檢測策略可對部件級故障進行診斷與切換重組,實現了對衛星重要故障狀態的監視與應急處置。采用1553B+SpaceWire雙總線結構,既滿足了高低速數據使用需求,又提高了數據傳輸接口的通用性,同時對衛星重要參數有備份與恢復功能。FY-4A星表明:其測控數管分系統實現了預期的功能。
CCSDS協議; 分包遙測遙控; 調度配置策略; 高精高頻; 境外遙測; 遙控優先級; 程控; 安全管理
0 引言
FY-4衛星是我國第二代靜止軌道氣象衛星,主要任務是接替FY-2衛星以確保我國靜止軌道氣象衛星觀測業務的連續、穩定,實現靜止軌道氣象衛星更新換代。隨著星上終端及下位機微處理器的普遍使用,其自主性越來越強、應用過程越來越豐富,傳統的PCM遙測遙控體制因其固定采樣率、固定編排格式,以及指令碼距要求等的局限性,已不能滿足星上復雜多變的數據源的傳輸要求和功能靈活性要求,因此對FY-4衛星測控系統提出了分包遙測、遙控體制的要求。與第一代靜止軌道氣象衛星和其他遙感、通信衛星相比,FY-4衛星有更多的遙控上行通道用于地面根據氣象應用情況進行突發或批量的業務指令上注,同時為盡可能減少地面遙控干預,最大限度地發揮星上計算機的自主運行能力并提高安全性,對星上遙控機優先級策略、程控功能覆蓋性提出了更高要求。為保證衛星在軌觀測業務的連續性,衛星須具備部件級故障檢測及重組、整星應急情況管理的能力。與我國第一代靜止氣象衛星相比,FY-4衛星的功能性能有跨越式提高,達到探測通道3倍、空間分辨率4倍、時間分辨率2倍,以及探測靈敏度0.1 ℃和探測精度0.5 ℃,衛星平臺數據及載荷遙感數據是第一代靜止軌道氣象衛星的20倍,這對整星高低速數據的有效傳輸提出了更高的要求。
FY-4衛星的分包遙測采用了虛擬信道遙測包調度、遙測包傳輸靈活配置、高精度高頻可編程遙測方法,以及境外遙測全過程采集;分包遙控采用基于5路遙控數據的優先級選擇方法,實現了衛星從發射至定點及在軌運行多項程控功能。FY-4衛星采用多種部件級故障管理策略和整星應急管理策略。FY-4衛星國內首次實現1553B+SpaceWire雙總線結構星載網絡傳輸技術,國際首次提出SpaceWire-RVTP協議。
本文介紹了FY-4衛星測控數管分系統的組成和工作原理,以及CCSDS協議的分包遙測方法在FY-4衛星中的應用特點,從遙測調度策略、配置策略、采樣精度頻率,以及衛星境外遙測采集等方面提出了創新的應用優化方法;介紹了CCSDS協議分包遙控方法的應用特點,特別是在指令優先級策略以及衛星從發射至定點全過程程控功能中的作用,分析了測控數管分系統作為衛星數據中心的高低速數據傳輸、部件故障檢測及整星安全管理等的應用特點。
1 測控數管分系統簡介
FY-4衛星測控與數管分系統結構如圖1所示。其中:測控子系統的主要功能是提供衛星與地面間遙測、遙控和測距,為衛星地面測試、發射至定點、在軌運行和離軌提供全壽命測控服務;數管子系統的主要功能是實現星務管理及載荷基帶管理。
衛星測控子系統采用S頻段統一載波測控體制,采用符合CCSDS協議的分包遙測及分包遙控方案,子系統由跟蹤子系統A、B和中心遙控機組成。其中:跟蹤子系統提供衛星與地面測控站間的無線傳輸通道,通過準全向測控天線接收地面站工程上行載波信號、發送下行遙測及測距信號;將解調出的遙控副載波信號送至中心遙控機,并接收數管計算機遙測副載波信號,與上行轉發的測距信號同時經載波調制及功率放大后,經測控天線下行至地面站。中心遙控機對S應答機輸出的2路工程遙控副載波信號及轉發系統S接收機輸出的2路業務遙控副載波信號,進行副載頻解調及數據識別,同時接收和識別數管計算機產生的程控PCM數據;中心遙控機和3臺配電測控單元輸出識別出的直接指令幀,中心遙控機將識別出的遙控注數幀送數管計算機進行進一步解析、分發。

圖1 FY-4衛星測控與數管分系統組成Fig.1 Structure of TT&C and data management subsystem for FY-4 satellite
衛星數管子系統采用1553B+SpaceWire雙總線結構,能有針對性地處理整星高低速數據,子系統由數管計算機和數據處理器A、B組成。數管計算機的功能是實現星務管理,除與測控系統共同完成整星遙測、遙控功能外,還包括1553B總線通信管理、星上時鐘管理、星箭分離及帆板展開程控、帆板閉環控制、平臺主動溫控、星敏支架精密溫控、蓄電池程控管理,以及在軌故障檢測與應急管理、在軌編程等。其中:數據處理器實現載荷基帶數據管理功能,通過SpaceWire總線接收高速載荷數據,通過1553B總線接收低速工程數據,對接收到的數據進行錯誤檢查、CCSDS協議格式化復接處理,并以LVDS接口電平形式向數傳分系統輸出2路平衡數據;數據處理器具網絡路由選擇控制功能,有星載網絡故障診斷與恢復機制。
2 分包遙測應用特點
傳統衛星主要采用PCM遙測體制。與分包遙測相比,其優點是格式簡單,省去了遙測包的包裝結構,數據緊湊、傳輸效率高[2]。PCM遙測體制主要包括主副幀和浮動組合兩種格式,其缺點是需預先確定每個遙測的位置,無法適應信號的變化,或不能隨衛星在軌運行動態隨時變化,雖可編程但靈活性較低。隨著星上信源自主性和隨機性越來越強,大量應用過程都能產生數據包,且不同應用過程源包的數據發生率和包長各異,這就要求遙測系統具動態組織這些數據包的能力,因此CCSDS分包遙測體制更適于自主性強的多信源、多應用過程的衛星。CCSDS協議分包遙測系統如圖2所示[2]。其信源、信宿、應用過程、虛擬信道和主信道間的關系如下:
a)單個信源可有多個功能、速率不同的應用過程;
b)虛擬信道面向的是應用過程而非信源,一般按功能特性組織;
c)多個虛擬信道獨立調度應用過程源包,互不影響;
d)多個虛擬信道按事先安排的調度策略分時獨占主信道;
e)單個應用過程源包在地面可被分發到多個信宿。
FY-4衛星采用CCSDS分包遙測設計。根據星上信源及其應用過程產生遙測的特點,將星上16個信源產生的107個應用過程分為工程數據、實時響應數據和內存下卸數據三類,分別分配了虛擬信道,三類數據的信道號、應用過程定義和用例見表1。按CCSDS協議定義,遙測傳送幀格式如圖3所示,遙測源包格式如圖4所示[3-4]。
FY-4衛星的分包遙測方案,采用了虛擬信道遙測包調度、遙測靈活配置傳輸、高精度高頻率遙測可編程,以及境外遙測全過程采集4種分包遙測優化方法,解決了衛星在有限遙測碼速率條件下遙測包調度不及時問題,能根據衛星工作模式自主動態調度遙測采集及下傳;解決了衛星在軌遙測異常難以排查問題,模擬示波器原理對重點遙測波道進行針對性高精度高頻率采樣;填補了衛星發射至定點過程中的遙測盲區,在衛星境外發生現象的分析中起了關鍵作用。

圖2 分包遙測系統Fig.2 Packet telemetry system

虛擬信道數據類型應用過程用例VC0工程數據62個平臺和總線下位機產生的工程遙測VC1實時響應數據39個總線下位機對遙控注數的實時反饋;星上產生應急報警信息VC2內存下卸數據6個星載計算機內存下卸
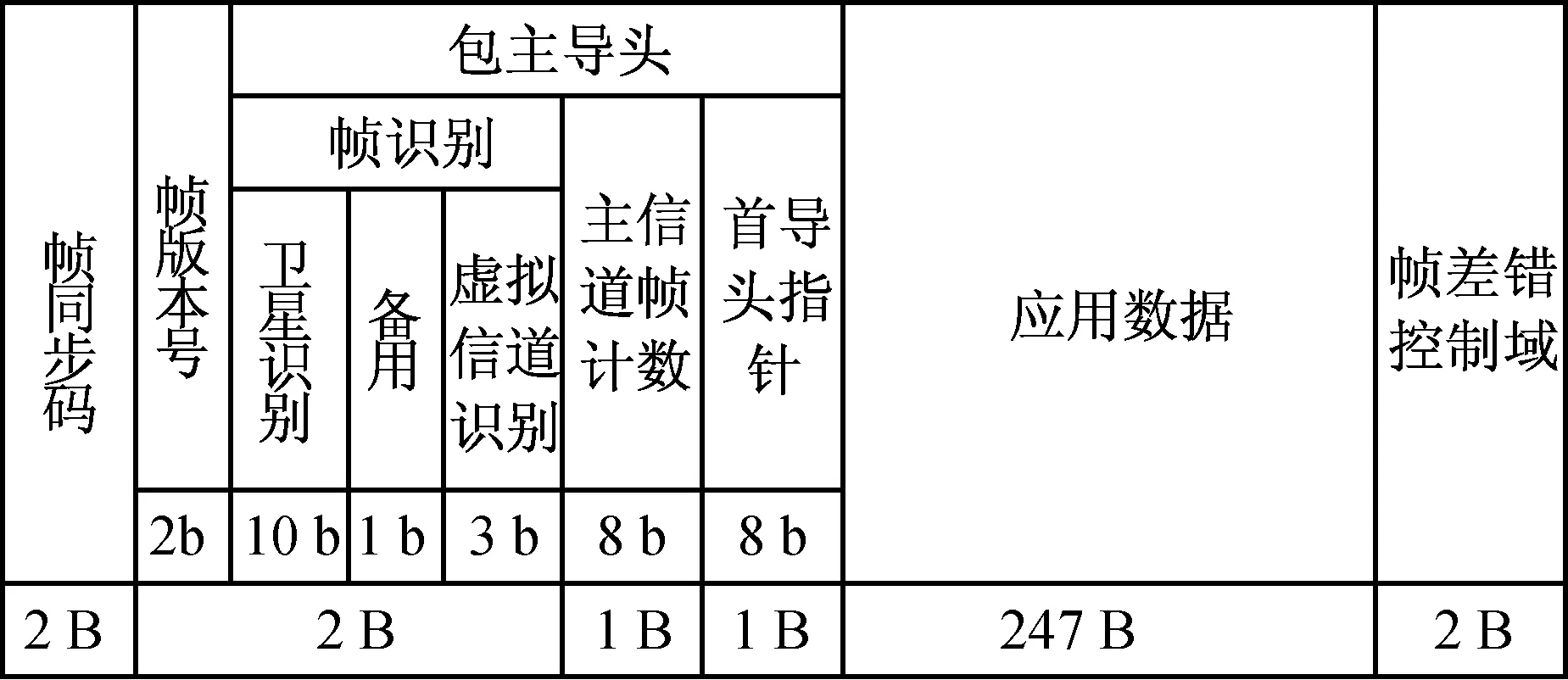
圖3 遙測源包組幀Fig.3 Arranging frames with telemetry packets

圖4 分包遙測源包格式定義Fig.4 Definition of packet’s format in packet telemetry
2.1虛擬信道遙測包調度
遙測幀中的應用數據字段采用虛擬信道調度策略和包調度策略填充遙測源包。
虛擬信道調度策略的設計,采用基于優先級的動態調度方法,設置優先級為:VC1>VC2>VC0。正常情況下VC0占用主信道,當地面有突發注數、星上產生應急報警或收到內存下卸命令時,VC1,VC2占用主信道[5]。遙測源包組幀如圖5所示:VC0將3個源包組幀下傳,其中第3包需跨幀傳輸,此時星上產生報警,VC1優先級較高將VC0數據打斷,等待報警數據傳輸完成后,VC0繼續傳輸第3包遙測和星上其他遙測數據[5]。
VC0由衛星平臺和總線下位機的工程遙測共同占用,若對遙測包不加考慮地按先進先出的原則裝入VC0,則較長的工程遙測慢包將可能阻塞快包,導致時延的產生,如圖6所示。如T1時刻隊列中的3個遙測包X、Y、Z依次排隊,先進先出,該時刻VC0首先組幀下傳遙測包X,并在T2時刻繼續下傳遙測包X(跨幀)、Y、Z,則T1時刻在隊列中排隊的快包X中產生了T2-T1的延時,降低了遙測的實時性[6]。
為此,對VC0~ VC2中的工程遙測包、實時響應包和內存下卸包設計了源包調度策略,使各虛擬信道的應用過程源包能有序下傳。設計原則如下:
a)每個虛擬信道調度應用過程源包的策略相互獨立,互不干擾;
b)每種速率遙測包分別建立隊列,相同速率遙測遵循先進先出原則;
c)按遙測包速率為優先級安排遙測組幀,遙測速率越快優先級越高(如圖7所示);
d)上一遙測幀中未傳完的遙測包在下一幀數據域中最先被傳輸;
e)遙測隊列為空時,數據域中未填滿部分用AA填充。

圖7 遙測源包組幀優先級Fig.7 Priority of telemetry packets by arranging frame
2.2靈活配置遙測包傳輸
FY-4衛星共應用過程(即遙測源包)107個,每個遙測源包的傳輸準禁、傳輸速率均可單獨配置,衛星發射前初始狀態禁止源包19個,允許其余源包88個下傳。FY-4衛星從發射至定點各階段運行過程中實際下傳的遙測源包數量統計見表2。結果表明:該方案可實現各階段遙測自動按需下傳,能自動適應信源開關狀態及變化,動態增加或減少遙測源包下傳數量,從而減少不必要的采集開銷及人工干預。

圖5 分包遙測傳送幀格式定義Fig.5 Definition of frame’s format in packet telemetry
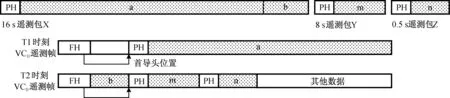
圖6 遙測快包延時Fig.6 Fast telemetry packet being delayed

數據類型主動段星箭分離圣地亞哥轉移軌道準同步定點后工程數據/包192837373943實時響應數據/包141461639內存下卸數據/包001001
此外,該遙測方案面向應用過程的特點使其具備強在軌編程能力,遙測包的速率由數管子系統控制,可根據需要通過地面遙控注數的形式修改數管子系統遙測功能相關參數,實現需快看的遙測加速下傳、不需快看的慢速下傳的要求。
北京時間12月11日01:03,FY-4A星帆板展開,測控數管分系統提取姿控三浮陀螺數據暫存于其內存中,后續通過圣地亞哥站指令將內存數據下卸至地面,通過對三浮陀螺數據以及衛星姿態角速度的分析,計算得出非約束下帆板0°轉角展開彎曲頻率見表3。
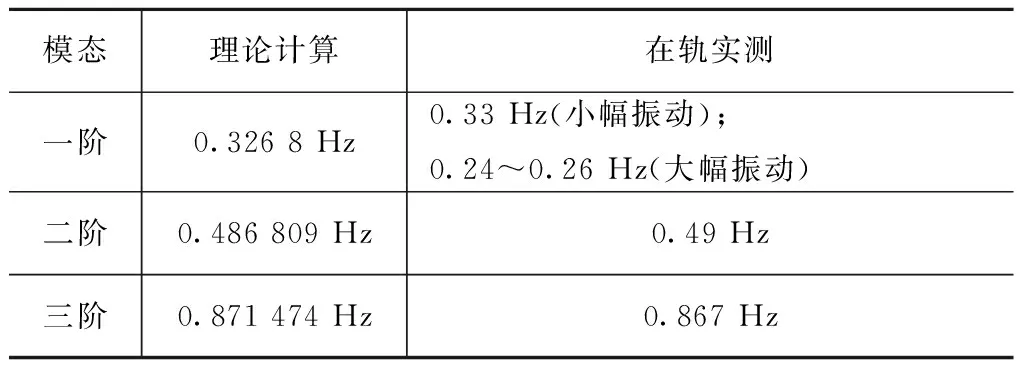
表3 帆板各階頻率
2.3高精高頻可編程方法
FY-4衛星在分包遙測方案的基礎上,首次提出一種高精度高頻率可編程的遙測采樣方法,設計的遙測包具模擬示波器工作原理的功能,可對需重點監視的遙測波道進行針對性的高精高頻采樣,能滿足衛星各階段測試、故障排查的使用要求。具體方法如下:
a)預定義一個遙測源包(包長待定),為其分配空閑應用過程識別符(APID)并設置其默認傳輸狀態為不下傳,以及默認傳輸周期。
b)按衛星具備的最高采樣能力設計該遙測包采樣精度,11位精度可用于表示2.44 mV以上遙測變化及波動,采樣精度高于星上其他遙測(8位)。
c)計算該遙測包采樣路數,根據b)設計的精度每一路遙測參數需占用遙測幀數據區1.5 B資源,建議高精度遙測對遙測幀數據區資源占用率不大于40%。
d)根據c)確定的遙測采樣路數初始化該遙測包采樣地址,某個遙測參數具體采樣頻率取決于預定義遙測包下傳周期及其在遙測包中被采集的次數。
e)當星上部分遙測出現異常,特別是衛星能源、衛星姿態和母線電壓電流等出現異常波動時,選擇需重點監視的1路/多路參數,上注修改預定義遙測包的采樣地址,設置遙測包傳輸狀態為下傳并根據需要設置傳輸周期。
f)地面測試系統根據遙測方案的規定對該遙測包APID進行識別并快速完成對衛星關鍵遙測參數的重點實時監視、數據存儲、事后回放、故障排查及定位。
常規遙測采集與高精高頻方法遙測采集對比效果如圖8所示。高精高頻采集方法的采集精度取決于星務計算機AD的最高采樣精度(根據需要設計),圖8中采集精度2.44 mV,是常規遙測精度的8倍,而采集頻率取決于星務計算機對時間周期分頻的程度。測試表明高精高頻采集方法可滿足星上遙測采集精度測試、故障排查的需要。
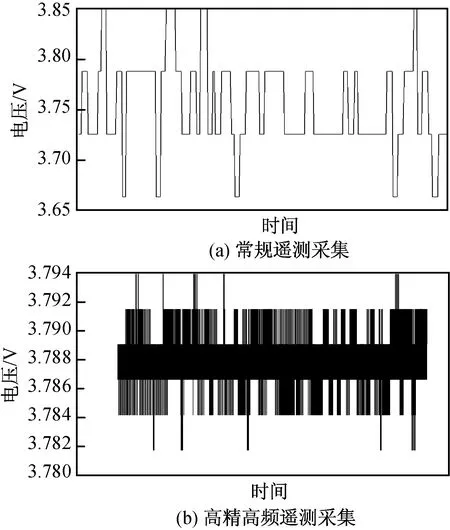
圖8 常規遙測與高精高頻遙測對比
2.4境外遙測全程采集
首次在高軌衛星上實現境外遙測全過程采集策略:衛星入軌初期,測控數管分系統通過1553B總線將轉移軌道段的境外遙測幀發送至某總線下位機進行存儲;在衛星定點后,根據地面指令將遙測幀(數傳包格式封裝)經SpaceWire總線調度至數傳通道下傳地面。
FY-4A星發射后從第一圈圣地亞哥站跟蹤結束至第五次遠地點點火完成期間,衛星共經歷出境4次、地影期5次,其中第一、二次地影出現在衛星第一次出境期間;第三次地影出現在第二次出境期間;第四、五次地影出現在第三次出境期間。衛星出境及出現地影的時間分別見表4、5。
北京時間12月11日01:03分帆板展開歸零后,分析實時遙測和回放境外遙測發現因太陽帆板背面蜂窩板內氣體不斷放出,對衛星+X、+Y軸產生干擾力矩最大達0.05 N·m,較光壓力矩大2個量級;隨著蜂窩板內氣體不斷放出,干擾力矩不斷減小,12月11日17:00左右X軸放氣結束,排氣時間持續接近16 h。放氣過程干擾如圖9所示。

表4 過渡軌道段衛星出境時間
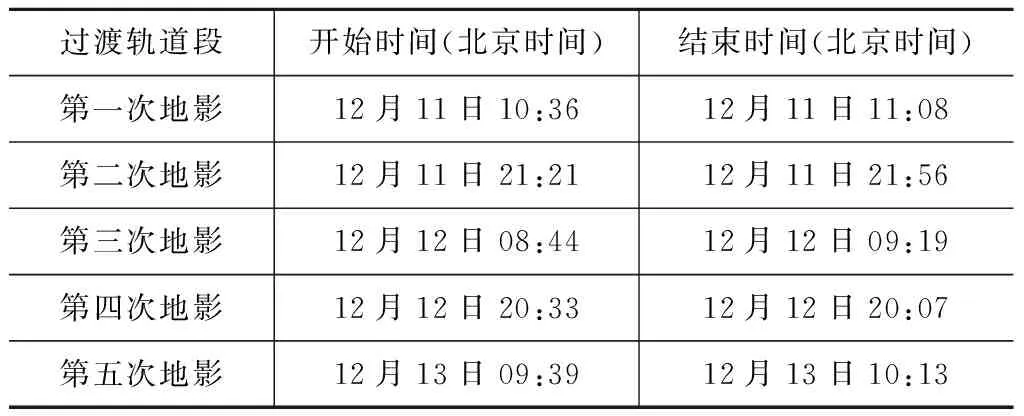
表5 過渡軌道段衛星地影時間

圖9 帆板放氣過程干擾力矩Fig.9 Disturbance torque during solar panel exhausting
FY-4A星第一次出境結束遙測跟蹤開始后,通過對境外遙測數據回放發現衛星X、Y軸干擾力矩明顯增大,認為衛星在近地點附近受到空氣阻力作用,并首次觀察到空氣阻力引起的干擾力矩最大達0.35 N·m,姿控分系統診斷出噴氣頻繁報警,如圖10所示。

圖10 推力器噴氣頻繁報警Fig.10 Alarm of frequent jetting for thrusters
根據空氣阻力力矩計算公式,當FY-4A星處于距地球約220 km上空時,空氣阻力對衛星太陽帆板(氣阻系數C=1,帆板面積S=17 m2,飛行速度v=7 780 m/s,力臂L=4.7 m)產生的氣動力矩0.33 N·m接近遙測估值,空氣阻力對星體的力矩接近于0 N·m。
FY-4A星5次地影均發生在境外,通過對境外遙測數據分析,回放出5次地影期間電源分系統工作狀態見表6。其中地影時間最長33 min,蓄電池組放電深度最大16.3%。地影期間太陽電池陣保持在0°零位,地影期內太陽陣輸出電流為0 A。
3 分包遙控應用特點
FY-4衛星遙控功能主要由S頻段應答機及S接收機、中心遙控機、配電測控單元、數管計算機和各總線下位機等共同完成。CCSDS協議分包遙控設計考慮了靜止軌道氣象衛星的應用特點,遙控信息設計分類如圖11所示。遙控信息按數據格式可分為直接指令幀和遙控注數幀;遙控注數幀按數據格式分為間接指令、內部指令和軟件指令,其中間接指令最終由中心遙控機或配電測控單元輸出脈沖式指令,而內部指令、軟件指令由各總線下位機執行,載荷工作指令是一種特殊格式的軟件指令。
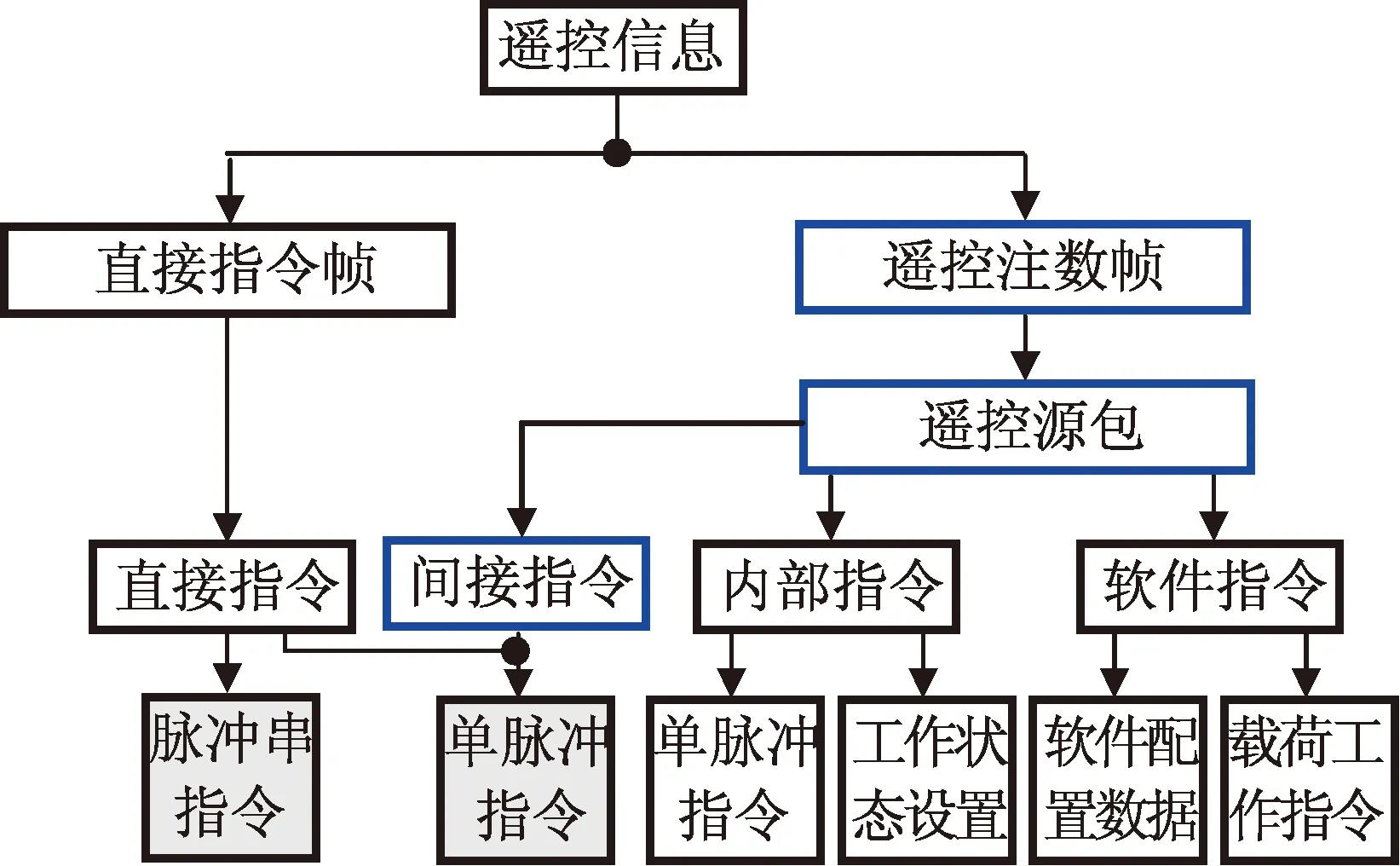
圖11 衛星遙控信息分類Fig.11 Classification of telecommand
FY-4衛星在分包遙測方案基礎上,采用了基于5路遙控數據的優先級選擇方法,并充分發揮程控指令時間符合性好、可靠性高等優點,實現了衛星從發射至定點在軌運行多項程控功能。FY-4衛星采用的遙控機優先級策略和兩種分包遙控的創新應用方法,解決了衛星多路遙控上行與程控指令沖突的難題,保證了遙控與程控指令同時得到輸出,簡化了星地操作流程;測控數管分系統覆蓋了整星全部9項程控管理,功能和性能均達到指標要求。
3.1遙控機優先級策略
FY-4衛星中心遙控機接收工程A、B,業務A、B共4路遙控副載波上行信號(分時工作),進行副載頻解調及數據識別,同時接收數管計算機輸入的程控數據(即間接指令)。為確保地面發送的4路遙控副載頻信號與數管計算機輸入的程控數據不發生沖突,提出并設計中心遙控機A、B機分別設置不同的優先級,順序如下:
a)中心遙控機A,工程A>業務A>程控>工程B>業務B;
b)中心遙控機B,業務B>工程B>程控>業務A>工程A。
根據上述指令優先級設置,指令執行邏輯見表7。當數管計算機發送程控數據同時向地面發送遙控指令時,能確保中心遙控機中的1臺遙控優先級始終高于數管程控,中心遙控機A、B機可分別輸出遙控與程控指令,有效解決了程控和地面遙控同時發令的沖突問題并簡化了星地操作流程。
3.2程控功能覆蓋能力
衛星運行過程中的程控指令包含間接指令、內部指令和軟件指令,指令生成后分別按時間順序進入隊列排隊,時間符合后測控數管分系統將指令碼送中心遙控機或總線下位機進行處理執行。

表6 五次地影期間電源工作情況

表7 遙控機指令執行邏輯
為盡可能減少地面遙控干預、最大限度發揮程控指令作用使衛星自主運行并提高安全性,FY-4衛星的程控指令設計遵循以下原則:
a)程控間接指令對直接指令具備全覆蓋能力,但從安全考慮應禁止部分火工品、載荷機構和推力器等威脅衛星安全的間接指令;
b)從衛星安全考慮,限制程控間接指令執行脈寬最大2 040 ms;
c)程控內部指令、軟件指令均根據衛星任務實際需要配置;
d)嚴格約束程控指令產生算法及判據,防止誤觸發。
按上述原則設計同時充分考慮衛星本身功能需求,測控數管分系統共實現衛星從發射至定點全過程的程控管理功能9項,其中平臺主動溫控、星敏支架精密溫控、電源蓄電池管理,以及太陽帆板閉環控制為在軌長期運行程控,程控功能執行效果見表8。

表8 程控功能執行效果

圖12 主動段振動Fig.12 Vibration in active phase
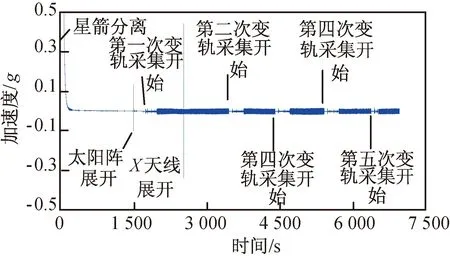
圖13 變軌段振動Fig.13 Vibration in orbit maneuver phase

圖14 推進液路電爆閥起爆狀態Fig.14 Initiation of explosive valve of propellant pipe
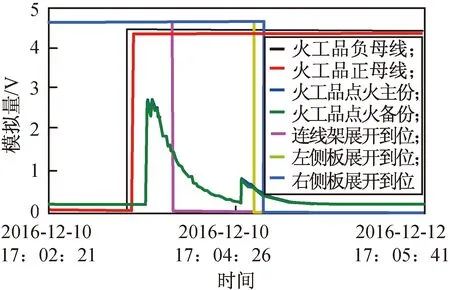
圖15 太陽帆板展開及歸零Fig.15 Solar panel deployment and zeroing
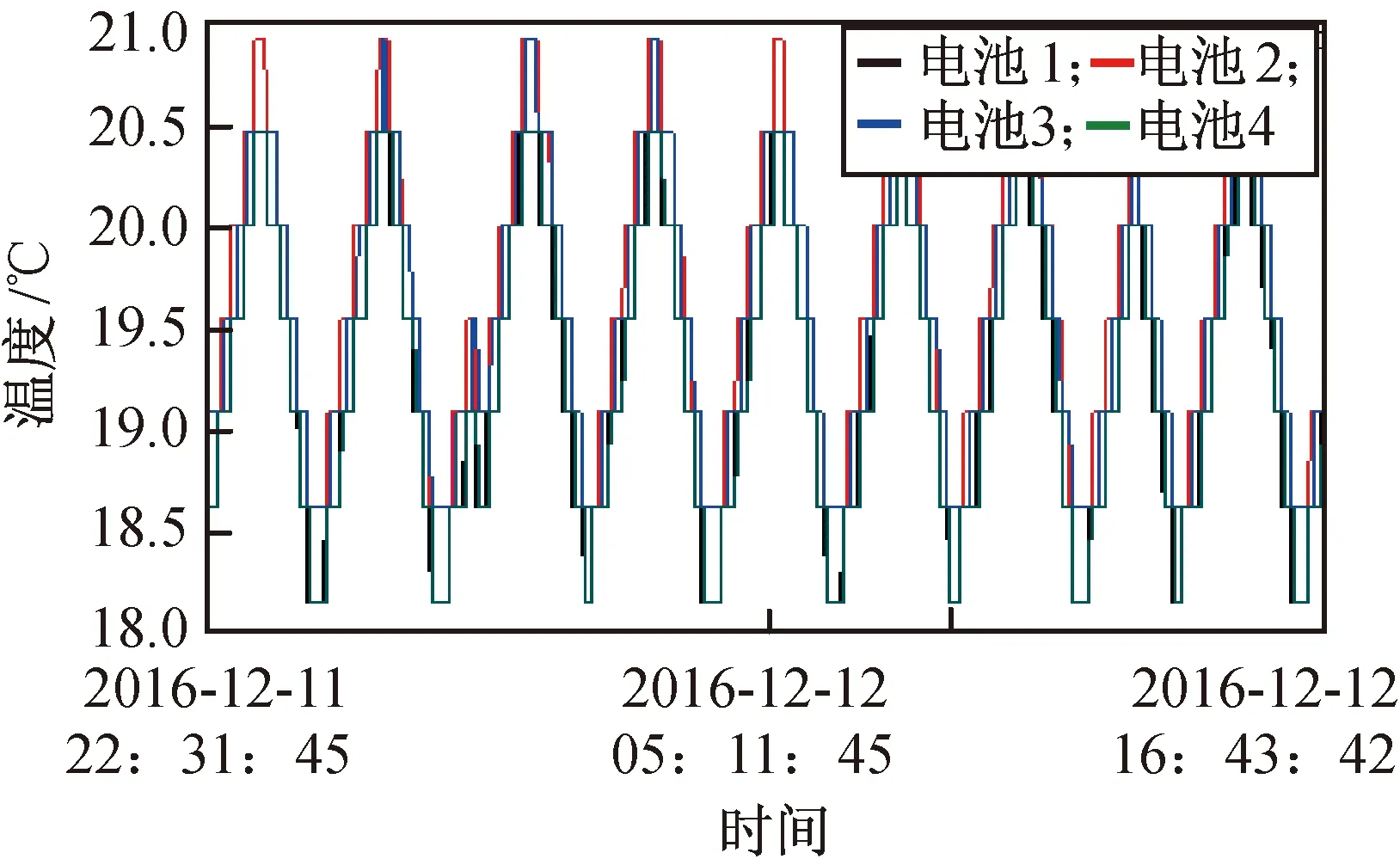
圖16 蓄電池組B在軌主動溫控Fig.16 Active temperature management of batteries B
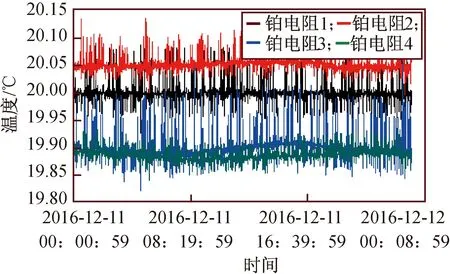
圖17 星敏支架1在軌精密溫控Fig.17 Fine temperature control of sensor support 1

圖18 蓄電池組A程控充電Fig.18 Charging of batteries A by program control

圖19 太陽帆板在軌閉環控制Fig.19 Closed-loop control of solar panel
由表8、圖12~19可知:發射階段測控數管分系統正確完成了主動段、變軌段振動數據的采集,星箭分離后完成了推進電爆閥起爆、帆板展開及頻率采集,在衛星飛行全過程實現平臺104路加熱器開關控制及星敏支架PID控制(精度達到20 ℃±3 ℃且每15 min溫度變化不大于±0.1 ℃),以及電源蓄電池組管理、太陽帆板閉環控制(控制精度±2°)。
4 故障及應急管理
FY-4衛星測控數管分系統作為衛星平臺及載荷的數據管理中心,對控制計算機、電源下位機等關鍵單機,以及自身的重要參數具備備份與恢復功能;對部件級故障具備一定的自主管理功能,設計相應的檢測策略以實現部件級故障診斷與切換重組;同時實現衛星能源安全、姿態安全等重要故障狀態監視與應急處置。
4.1部件故障管理策略
為避免部件級故障蔓延至整星,影響衛星安全,對星上可能出現的部件級故障進行影響域及措施分析,特別是涉及長期運行程控功能判斷條件的部件,共梳理部件級故障管理8項,測控數管分系統對測控上下行通道故障、熱敏電阻標稱電壓異常、外部太陽帆板驅動器、星敏精密控溫儀及電源通信故障、分系統自身熱起動復位異常及1553B總線通信故障等進行周期性檢查,對檢測到的部件級故障按相應故障策略進行處置,見表9。
雖然以上部件級故障自FY-4A星發射至今并未發生,但地面測試階段多次驗證均能實現檢測:衛星測控上下行通道暢通;測控數管分系統長期運行的4項程控功能不因部件通信異常或基準電壓異常而導致誤判;分系統及各下位機能發現1553B總線通信異常并及時復位ACE芯片;數管計算機能主動置不健康狀態,防止進入由自身循環熱起動狀態導致的系統運行故障中,從而保證衛星運行安全。
4.2整星應急管理策略
根據對整星故障的影響域及措施分析,將危及整星安全的故障分為衛星姿態失控故障和衛星能源異常故障,其中:姿態失控故障分為姿控進入應急線路(EC)模式、進入太捕模式;能源異常故障按蓄電池組的過放程度分為一級、二級和三級過放。測控數管分系統對以上故障模式進行自主診斷和應急狀態管理,安全控制流程如圖20所示。分系統對應急狀態管理策略如下:
a)當姿控進入EC、太捕模式,能源進入二級、三級過放時,數管清空業務指令隊列;
b)當姿控進入EC、太捕模式時,分系統通過程控關閉整星不必要的負載單機,并設置主動溫控應急模式以降低整星功耗,同時帆板歸零;
c)當能源進入一級過放時,分系統通過設置主動溫控應急模式以降低整星功耗;
d)當能源進入二級過放時,分系統通過程控關閉整星不必要的負載單機,同時設置主動溫控極限低溫模式盡可能降低整星功耗;
e)當能源進入二級、三級過放時,分系統設置蓄電池過放保護允許,為斷開放電開關做準備;
f)當能源進入三級過放,分系統通過程控斷開蓄電池組放電開關,防止鋰電池進入不可逆的損壞狀態;
g)衛星進入應急狀態后,及時保存境外遙測防止衛星姿態翻轉導致遙測信號中斷;
h)分系統執行的安全控制流程操作,通過遙測及報警狀態通知地面系統;
i)分系統根據故障判斷條件,通過剔野、求平均、時間累計等可靠性措施避免誤判而導致開關誤動作;
j)某些單機非關鍵參數出現短時間異常,經過故障容錯分析不影響衛星業務運行;
k)除特殊規定外,分系統對姿控安全操作、能源安全操作的準禁由地面注入;
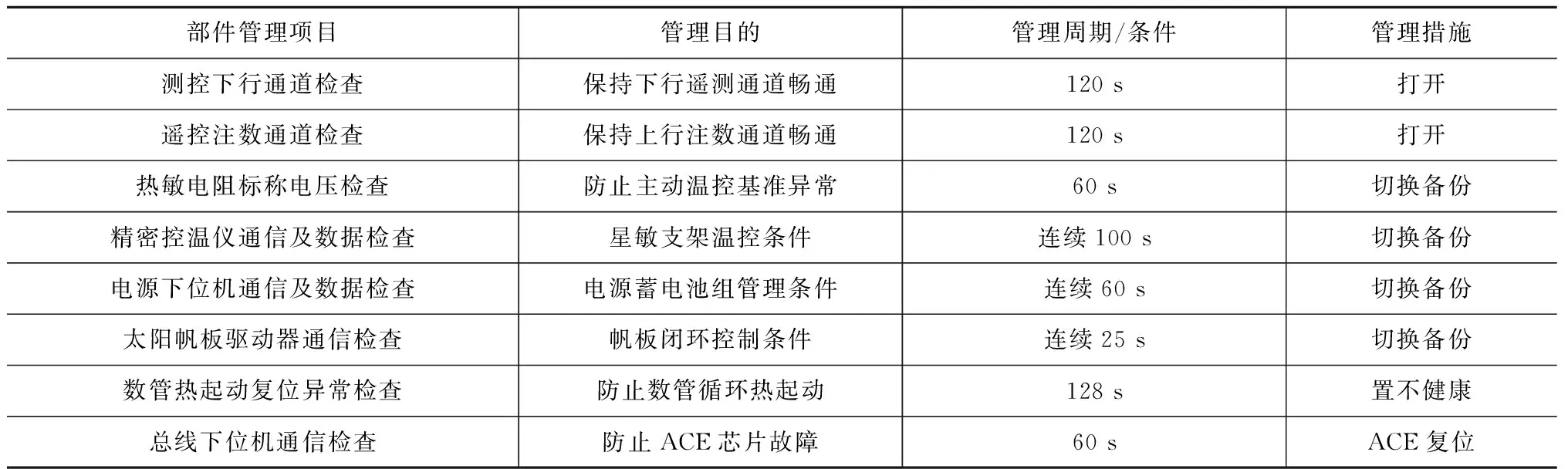
表9 部件級故障管理

圖20 衛星安全控制流程Fig.20 Procedures of security control
l)分系統安全控制流程使用的判據門限調整均通過遙控注數進行修改。
雖然自FY-4A星發射至今,上述衛星姿態失控故障和衛星能源異常故障并未發生,但地面測試階段及熱真空試驗多次驗證,分系統能及時檢測出姿態失控故障并采取相應措施;能分別檢測出能源一級、二級、三級過放,并依次采取對應保護措施;按故障分別降低負載盡可能延長衛星搶救時間;防止鋰電池進入不可逆損壞狀態。
5 高低速數據傳輸
雖然1553B總線的抗干擾性強、數據傳輸可靠、適合集中控制,但碼速率僅1 Mb/s,無法支持更高速率的數據傳輸需求[7]。SpaceWire總線是歐空局為航天應用而設計的一種高速、可升級、低功耗、低成本的串行總線(傳輸速率2~400 Mb/s),是一種點對點、全雙工通信或通過路由交換機形成復雜通信網絡的總線形式。FY-4衛星測控數管分系統在國內首次采用1553B+SpaceWire雙總線結構,SpaceWire總線接收各路高速載荷遙感數據,由AOS合路及處理完成與1553B總線低速數據復接,通過LVDS接口向數傳分系統輸出兩路速率100 Mb/s的CCSDS格式數據流(如圖1所示),既滿足高低速數據的使用需求,又提高了數據傳輸接口的通用性。
5.1SpaceWire-RVTP協議
FY-4衛星在SpaceWire總線協議的基礎上,國際上首次提出一種遠程虛擬信道傳輸(RVTP)協議[8]。與基本SpaceWire協議相比,RVTP協議設計是將一個CCSDS AOS虛擬信道幀封裝到SpaceWire數據包中,通過SpaceWire網絡從源節點傳輸到目標節點;目標節點從SpaceWire數據包中提取AOS虛擬信道幀再傳輸給目標用戶使用;對SpaceWire數據包具有協議符合性檢測功能[9]。基本SpaceWire協議與SpaceWire-RVTP協議流程如圖21所示。

圖21 基本SpaceWire協議與SpaceWire-RVTP協議流程Fig.21 Procedures of basic SpaceWire and SpaceWire-RVTP protocols
5.2網絡路由控制策略
FY-4衛星采用SpaceWire總線傳輸的高速載荷數據通道有4個,分別為多通道掃描成像輻射計、大氣垂直探測儀通道1、大氣垂直探測儀通道2和閃電成像儀,SpaceWire網絡路由控制主要完成上述載荷數據包傳輸過程路徑選擇,采用路徑尋址方式由SpaceWire協議芯片完成,如圖22所示[10]。除默認路徑外,地面可通過遙控注數幀配置載荷端SpaceWire端口地址以實現載荷端SpaceWire數據包的鏈路傳輸路徑切換。
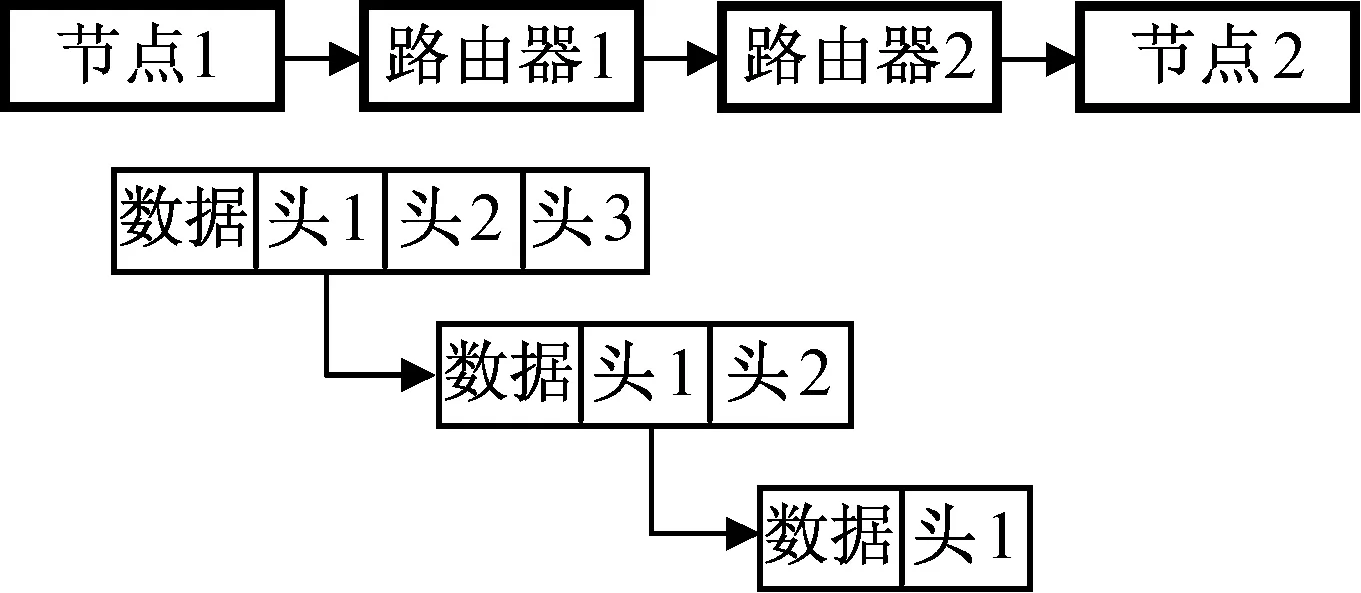
圖22 路徑尋址方式Fig.22 Path of addressing mode
由圖1可知:數據處理器具有主、備網絡結構,通過網絡路由器互聯,可實現任意載荷通道(包括主、備份通道共8個)路由傳輸至任意數傳通道(包括主、備份通道共4個)。
5.3網絡流量控制策略
FY-4衛星SpaceWire網絡流量控制策略由數據處理器實施。為避免數據突發傳輸導致網絡傳輸丟包異常,載荷節點準備好一個SpaceWire數據包即向數據處理器發送數據傳輸請求,數據傳輸過程中,當某個端口路由傳輸超時時,數據處理器將清除該端口路由路徑防止其獨占通道,以便于其他端口使用該傳輸路徑,超時周期設置為1.3 ms。
6 結束語
本文介紹了FY-4衛星測控數管分系統的設計特點及應用情況。FY-4衛星采用4種分包遙測優化方法,解決了衛星在有限遙測碼速率條件下遙測包調度不及時問題,能根據衛星工作模式自主動態調度遙測采集及下傳;解決了衛星在軌遙測異常難以排查問題,模擬示波器原理對重點遙測波道進行針對性高精度高頻率采樣;填補了衛星發射至定點過程中的遙測盲區,對衛星境外所發生現象的分析起了關鍵作用。FY-4衛星提出的2種分包遙控創新、應用方法,解決了衛星多路遙控上行與程控指令沖突的難題,保證了遙控與程控指令同時得到輸出,簡化了星地操作流程;測控數管分系統覆蓋整星9項程控管理,功能和性能均達到指標要求。FY-4衛星采用1553B+SpaceWire雙總線結構,既滿足了高低速數據使用需求,又提高了數據傳輸接口的通用性,同時對衛星重要參數具備備份與恢復功能;對部件級故障具備一定自主管理功能,設計了相應的檢測策略實現部件級故障診斷與切換重組;實現了衛星多級能源安全、姿態安全等重要故障狀態監視與應急處置。
隨著衛星上下行碼速率的進一步提高、星上各終端及下位機微處理器的普遍使用和功能性能的提高,CCSDS分包遙測、遙控體制因面向應用過程、對需求變化適應性強等特點,將發揮更明顯的優勢。FY-4衛星采用的虛擬信道遙測包調度、靈活配置遙測包傳輸和高精高頻可編程方法可有效用于其他采用分包體制的衛星系統;境外遙測全程采集方法可推廣至其他高軌衛星;部件故障檢測策略、多級故障應對策略也可供其他衛星參考使用。此外,FY-4衛星測控方案采用集中管理、分布采集和驅動的實現形式,數管部分的星務管理、載荷基帶數據管理采用集中管理形式,體現了綜合電子的部分設計理念。今后,隨著綜合電子技術研究的逐漸深入,可在統一的體系結構、星載信息網絡、標準硬件和軟件接口、星載總線標準化、星載軟件構件化,以及容錯重構能力等方面,基于統一的任務調度和管理,建立一體化的衛星綜合電子系統,提高整星的功能密度及系統可靠性,實現系統的有效在軌維護和重構。
[1] 姜昌. 分包遙測、遙控與AOS設計思想初探[J]. 飛行器測控技術, 1996, 15(3): 5-13.
[2] 譚維熾, 顧瑩琦. 空間數據系統[M]. 北京: 中國科學技術出版社, 2004: 60-77.
[3] ESA. Packet telemetry standard: ESA PSS-04-106[M]. Issue 1. Paris: ESA, 1988.
[4] CCSDS. Packet telemetry, CCSDS 102.0-B-5, blue book[M]. Washington D.C.: CCSDS, 2001.
[5] 譚維熾, 顧瑩琦. CCSDS下行鏈路虛擬信道調度方法及性能分析[J]. 中國空間科學技術, 2001, 21(3): 29-35.
[6] 范穎婷, 朱振華, 王軍旗. CCSDS分包遙測在某衛星型號中的應用[J]. 飛行器測控學報, 2012, 31(S1): 77-80.
[7] 中國航空工業總公司第六一五所, 中國航空工業總公司第三○一所. 數字式時分制指令/響應型多路傳輸數據總線: GJB 289A—1997[S]. 北京: 國防科學技術工業委員會, 1997.
[8] CCSDS. AOS space data link protocol, CCSDS 732.0-B-2, blue book[M].Washington D.C.: CCSDS, 2006.
[9] ECSS. Space engineering, Space Wire Links, nodes, routers and networks: ECSS E 50 12A[S]. Noordwijk: ECSS, 2006.
[10] EADS Astrium: SpW-10X Space Wire router user manual[M]. Paris: EADS, 2008.
ApplicationsofTT&CandDataManagementSubsystemBasedonDoubleBusforFY-4Satellite
FAN Ying-ting, ZHU Zhen-hua, WANG Zhen, GU Qiang, WANG Jun-qi, YAN Kui
(Shanghai Institute of Satellite Engineering, Shanghai 201109, China)
The characteristics and application of TT&C and data management subsystem for FY-4 meteorological satellite were introduced in this paper. The composition and operation of the subsystem were presented. The CCSDS packet telemetry was adopted. The four telemetry optimal methods of scheduling policy of virtual channels and telemetry packets, configuration policy for telemetry packet, high precision and high frequency telemetry and the offshore telemetry collection method were put forward, which realized the autonomous dynamic collection and download of telemetry, telemetry abnormity checking on orbit, high precision and high frequency telemetry for key telemetry channel and elimination of telemetry dead space during launching to pointing of the satellite. The priority policy of telecommand data was applied in telemetry, which ensured the telecommand and program control command outputting simultaneously and realized the all program control functions from launching to pointing of the satellite. The management strategies of the component level failures and the whole satellite level failures were designed, which had the capacity to backup and recovery for the key units’ parameters and autonomic diagnosis and restructure for the component level failures, so it realized the monitoring and emergency handling of the key failures of the satellite. The double-bus of 1553B and SpaceWire were used, which satisfied the requirements of high speed data and low speed data and improved the versatility of the data transmission interface. And it provided functions of the important data backup and recovery of the satellite. The flight results of FY-4A satellite showed that it’s TT&C and data management subsystem complemented the function proposed.
CCSDS protocols; packet telemetry and telecommand; scheduling and configuration policy; high precision and high frequency; offshore telemetry; priority of telecommand; stored program control; security management and emergency handling
1006-1630(2017)04-0104-14
2017-06-22;
:2017-07-27
范穎婷(1985—),女,工程師,主要從事衛星測控數管分系統設計與應用。
V447
:ADOI:10.19328/j.cnki.1006-1630.2017.04.013
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
汽車維修與保養(2019年7期)2020-01-06 03:30:42
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39
