有向異構無線傳感器網絡節點覆蓋率優化算法
2017-09-22 12:18:15徐忠明楊朝玉唐小江
計算機應用 2017年7期
徐忠明,譚 勵,楊朝玉,唐小江
(北京工商大學 計算機與信息工程學院,北京 100048) (*通信作者電子郵箱tanli@th.btbu.edu.cn)
有向異構無線傳感器網絡節點覆蓋率優化算法
徐忠明,譚 勵*,楊朝玉,唐小江
(北京工商大學 計算機與信息工程學院,北京 100048) (*通信作者電子郵箱tanli@th.btbu.edu.cn)
針對有向異構節點部署存在覆蓋漏洞多、局部部署不均勻等問題,提出一種有向異構傳感器網絡目標路徑覆蓋的精確部署算法(DHPSA)。自主部署過程分為兩個階段:首先,節點在鄰居節點的虛擬作用力和指定路徑虛擬引力的合力作用下實時選擇最優路線部署到目標路徑;然后,節點在鄰居節點的組合虛擬力作用下通過自主旋轉和自主移動實現位置的微調,繼而實現對目標路徑的精確覆蓋。通過仿真實驗對比分析,所提算法比基于虛擬力的精確部署算法(VFPSA)在覆蓋率方面提高約4.4%、重疊率方面下降約3.4%,移動距離方面減少約2.1%及部署時間減少約4.3%。仿真實驗結果表明該部署算法更能有效地增大覆蓋率,減小重疊率,降低能耗。
有向異構;精確部署;虛擬力;節點旋轉;路徑覆蓋
0 引言
無線傳感器網絡中節點部署的質量直接影響到網絡的性能,部署問題作為無線傳感器網絡中研究的基本問題[1],反映了傳感器網絡所能提供的感知服務質量。目前,對于傳感器網絡部署問題的研究,多數是以全向同構傳感器作為研究對象[2-4]。全向同構傳感器網絡簡化了節點模型,但應用領域卻受到了限制,通常適用于檢測如溫度、濕度等簡單的環境數據。有向傳感器網絡在人們的生產、生活中的應用更為普遍,由于感知角度受限,只需感知來自某一方向的信息,且感知角度范圍通常存在差異,需要針對性地進行研究。
近年來針對有向傳感器網絡部署問題的研究越來越多。文獻[5]針對無線傳感器網絡部署問題提出有向傳感器網絡方向感知模型,沒有對異構節點部署進行針對性研究。文獻[6]通過物理學中虛擬勢場的作用,提出了一種基于虛擬勢場的有向傳感器網絡覆蓋增強算法(Potential Field-based Coverage Enhancing Algorithm, PFCEA),該算法中節點間的作用力同樣基于質心點模型,與本文算法區別主要在于節點移動到目標路徑后會通過自主旋轉和移動增大覆蓋率等。文獻[7]針對重點區域覆蓋不足的問題,提出了一種改進的非均勻有向傳感器網絡節點部署方法,該方法的使用場景主要在當需要覆蓋重點區域時,使用傳統方法不能有效突出重點區域;但研究對象仍然為有向同構節點,而異構節點更符合實際需求。文獻[8]針對復雜區域的無線傳感器網絡覆蓋優化問題,使用以扇形節點圍繞質心點轉動的節點模型,提出一種基于虛擬勢場的復雜區域覆蓋優化算法(Coverage Optimization Algorithm for directional sensor network in Complex Area, COACA),通過減小節點的旋轉面積實現部署優化,該算法的研究對象是有向同構節點;而本文的研究對象為異構節點,更具有實際應用價值。文獻[9]提出了一種無線傳感器網絡動態覆蓋算法,通過調整目標覆蓋區域幾何邊界,協同調度無線傳感器網絡節點,從而實現目標區域無線傳感器網絡動態覆蓋;該算法用于解決動態覆蓋問題,不適合解決異構節點部署。文獻[10]針對多跳無線傳感器網絡中數據采集只采用單目標優化策略帶來的問題,提出一種基于多目標優化的可移動sink節點部署模型;該算法模型以傳感器網絡部署能耗最低為主要目標,而本文算法模型除以能耗為目標還考慮節點覆蓋率、重疊率等指標。文獻[11]針對高大規模密集部署的無線傳感器網絡節點覆蓋率,提出一種基于虛擬力的節點分簇動態部署策略;該算法以打破網絡中部節點受力平衡、降低部署過程中簇間干涉、提高節點覆蓋率為目的,但沒有考慮到節點的異構特性,僅僅針對有向同構節點進行研究。文獻[12]針對覆蓋空洞、節點分布不均勻問題,通過邊界部署保證邊界上的完全覆蓋和連通;通過該算法部署不需要額外探測和修復成本,算法僅僅是基于傳統算法模型上作了些改進,并沒有考慮節點異構性。文獻[13]在含有移動節點的混合無線傳感器網絡中,采用更符合實際情況的基于誤警率的概率探測感知模型;該算法針對有同構節點能提高檢測區域的覆蓋率,但針對異構節點效果并不理想。
現有的部署算法大多數以同構節點作為研究對象,而異構性更符合實際需求。本文以異構的無線傳感器網絡作為研究對象,提出了有向異構傳感器網絡節點的感知模型、虛擬作用力模型,在此基礎上提出了一種適于有向異構傳感器網絡目標路徑覆蓋的精確部署算法(Directional and Heterogeneous Precision Self-deployment Algorithm, DHPSA),從而達到精確部署的目的,并且增大覆蓋率、減小重疊率。
1 DHPSA模型
1.1 假設與定義
首先作出如下假設與定義。
假設1 每個節點自身當前的位置可以通過全球定位系統(Global Positioning System, GPS)或相關算法計算出,并得到確定的坐標信息。
假設2 節點的通信半徑為Rc,當兩個節點間的直線距離Dij小于或等于節點本身的通信半徑Rc時,這兩個節點互為彼此的鄰居節點,互相之間可以通信。
假設3 節點在通信半徑Rc內能量連續,通信半徑外通信能量為0。
定義1 在監控區域內,若某個節點與其鄰接節點的覆蓋區域存在重疊,則稱重疊部分為這兩個節點的覆蓋重疊區域。
1.2 有向異構節點感知模型
傳感器感知能力是指傳感器感知模型覆蓋范圍的大小,異構傳感器網絡主要體現在傳感器感知能力的不同,通過簡單的抽象,可以得到異構有向傳感器節點的二維感知表示,如圖1所示。
有向異構傳感器網絡節點的二維感知模型為如圖2中實線所示的扇形,用三元組〈R,V,α〉表示。其中:R是扇形的半徑,表示節點最大感知距離;V是單位向量,位于扇形的中軸線上,表示傳感器的感知方向;α是該扇形的張角,表示傳感器的感知角度,稱為視場。特別地,當α=2π時,即為二維全向傳感器。

圖1 有向異構傳感器網絡節點

圖2 有向異構傳感器感知模型
判斷監測區域內位于T位置的目標點是否被位于P位置的傳感器節點i〈Ri,Vi,αi〉覆蓋,可以使用如下方法:如圖2所示,如果‖TP‖≤Ri且TP*Vi≥‖TP‖ cos(αi/2),則目標節點被覆蓋,否則不被覆蓋。
1.3 有向異構傳感器網絡作用力模型
理想狀態下,無線傳感器節點在自動部署過程中通常受到兩種類型的作用力,分別是節點之間虛擬作用力和路徑所產生的虛擬引力。本文節點間作用力引入了斥力半徑作為受力平衡位置,引入節點質心作為節點受力點。而路徑對節點的引力引入了節點到路徑的垂足點,節點每次移動都是沿著垂足點方向移動,從而減小能量的消耗。與文獻[14]提出的基于虛擬力的精確部署算法(Virtual Force-based Precision Self-deployment Algorithm, VFPSA)不同,本文提出的DHPSA策略為當節點移動到路徑后,節點通過受到鄰居節點的合力來調整節點位置或旋轉方向,通過不斷地移動和旋轉使覆蓋率逐漸變大,重疊率逐漸變小。
1.3.1 節點作用力模型
節點間作用力的模型是基于物理學中電場的概念,將傳感器節點看作是電場中的某個帶電荷的粒子,由于電場中存在引力和斥力,節點之間也存在引力和斥力的作用,其中節點距離和受力關系如圖3所示。
由以上建立的距離和受力模型可建立如下作用力關系式。
其中,引力和斥力的作用范圍都是[0,Rc],其中Rc指節點的通信范圍。假設存在Rk(Rc>Rk),當節點Pi和Pj的距離0
節點A和B所受的作用力(包括引力和斥力)關系式如下:
F(A,B)=
(1)
其中:正號表示引力;負號表示斥力;Dij表示節點間距離;Rk表示平衡時距離;Rc表示通信半徑;α、β、θ、k1表示為增益系數。
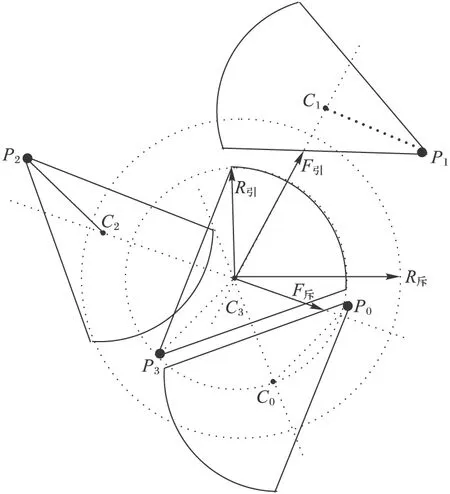
圖3 節點距離和受力關系
1.3.2 路徑作用力模型
為了實現節點對目標路徑的有效覆蓋,提出“引力曲線”的概念,即目標路徑會對每一個節點產生引力,在此引力的作用下使得節點自主向目標路徑移動,實現對目標路徑的覆蓋。對任意節點A,總能夠找到一條到達目標路徑的最短路徑,其最短距離定義為D。最短路徑所對應的目標路徑上的垂足點,定義為節點在曲線上的投影點P。投影點P與節點A間存在引力作用,且引力由投影點P指向節點A,使得節點在移動過程中能夠始終沿“最短路徑”不斷接近目標路徑,最終完成對目標路徑的覆蓋,如圖4所示。

圖4 目標路徑對節點作用力示意圖
節點受到引力曲線的引力可以用如式(2)所示:
(2)
其中:i為傳感器節點,j為節點在指定路徑的垂足點,dij表示節點與垂足點間距離,0表示節點已經到達路徑且路徑對節點作用力為0。
1.3.3 節點旋轉模型
與文獻[14]提出的精確部署算法相比,該算法節點間的作用力同樣基于斥力模型,區別主要在于節點到達路徑后,會受到鄰居節點作用合力來進行移動和旋轉,通過移動和旋轉角度增大覆蓋率與減小重疊率,如圖5所示。
圖5中:S表示傳感器節點;V表示節點的感知方向的單位矢量;F合1和F合2分別表示節點受鄰居節點的矢量合力,位于節點感知方向的不同兩側;若合力如F合1所示,則節點將逆時針旋轉一個步長,若合力如F合2所示,則節點順時針旋轉一個步長,直到節點受力完全達到平衡狀態。

圖5 節點旋轉模型
2 DHPSA過程描述
基于前面建立的模型,實現DHPSA,該算法是一個分布式算法,即所有待部署節點都并發地執行該算法。算法主要步驟如下。
1)初始化。首先對節點初始位置和感知方向初始化,關聯其他節點,構建每個節點的鄰居節點集合。初始化節點合力為零時暫停的時間長度、節點的移動步長及到達路徑后的旋轉角度。
2)移動過程中。節點與其鄰居節集合內的所有節點依次判斷之間的距離,通過距離來計算每個鄰居節點對當前節點產生的作用力,最終得出鄰居節點的合力;目標路徑會對當前節點產生引力作用,計算出當前節點到目標路徑投影點距離從而計算出引力大小;最終求出當前節點受到的合力從而確定移動的方向和距離。
3)移動到路徑后。節點移動到目標路徑后將只會受到路徑節點的作用力。首先,設置一個信號量變量sign,通過信號量來控制節點是移動優先還是旋轉優先;其次,計算出當前節點受到鄰居節點合力,將合力與節點感知方向比較,若合力在感知方向左側,則節點將向左移動或旋轉,若在右側將向右側移動或旋轉,節點移動和旋轉通過信號量控制進行選擇,在旋轉能減少重疊的情況下優先選擇旋轉。
4)穩定狀態。重復步驟1)至3)直到整個網絡部署達到滿足要求的覆蓋率及重疊率。
算法偽代碼描述如下:
初始化節點部署初期位置Pi(x,y),Vi; 初始化時間步長Δt,移動步長stepLength,旋轉角度Δθ;

部署算法流程如圖6所示。

圖6 DHPSA主要流程
算法核心部分分析如下。
1)搜索鄰居節點。
for (i=0;i } //構建鄰居節點 復雜度分析 整個網絡中存在m個傳感器節點,系統循環搜索所有個節點,依次計算每個節點是否屬于該節點的鄰居節點,若是鄰居節點將放入鄰居節點集合中。循環次數為節點個數,因此時間復雜度為O(m)。 2)向路徑移動過程。 for (i=0;i } 復雜度分析 當前節點每作一次移動將會搜索鄰居節點并計算所有鄰居節點作用力。由于搜索的時間復雜度為O(m),計算鄰居節點的時間復雜度為O(n),所以最終復雜度為O(m*n)。 3.1 部署質量評價 無線傳感器網絡的部署效果與性能評價指標對于分析該部署的可用性與有效性至關重要,通常評價無線傳感器網絡的覆蓋質量有以下幾種指標:覆蓋率、重疊率、平均移動距離、部署時間。 1)覆蓋率。 覆蓋率通常定義為所有傳感器覆蓋的總面積與目標區域總面積的比值,其中節點覆蓋的總面積取集合概念中的并集。如果節點Si的覆蓋區域為Ai,區域總面積為A,則覆蓋率為: (3) 其中節點覆蓋總區域取每個節點區域的并集,顯然區域的總覆蓋率小于或等于1。 2)重疊率。 重疊率是指區域中所有節點的有效覆蓋面積的并集占所有節點覆蓋面積之和的百分比,用來衡量節點覆蓋范圍的有效性,計算公式如式(4)所示: (4) 在有向節點覆蓋問題中,網絡的重疊率不可能為0,重疊率反映了節點覆蓋的重疊程度,重疊率越高表示當前節點間的覆蓋重疊越嚴重;反之亦然。 3)平均移動距離。 平均移動距離是指所有節點移動的距離之和的平均值,用來衡量節點能量消耗大小,計算公式如式(5)所示: (5) 其中:di為節點i移動的總距離,n為節點數量。 4)部署時間。 部署時間是指所有節點都達到穩定狀態后所需要的時間,部署時間短所需要的能量少,反之亦然。 3.2 實驗仿真 本實驗是基于The ONE仿真模擬器,實驗中以節點為單位,其中仿真器中每個扇形表示不同的節點,實驗中異構節點分為3組,具有3種不同的感知角度,分別為60°、90°、120°,感知半徑相同,通信半徑也相同。 本次實驗在模擬曲線路徑(8×160)隨機拋灑150個節點,每隔一段時間記錄節點移動軌跡及其對應的覆蓋率和重疊率的變化情況,如圖7所示記錄了節點移動軌跡,其中t為以節點運動開始為基準的時間增加值。 從節點部署軌跡可以看出,該算法能達到精確部署的目的,節點質心在鄰居節點合力的作用下進行移動和旋轉,從而覆蓋整條路徑。 圖7 節點移動軌跡 3.3 算法對比分析 基于實驗結果,本節將本文算法與文獻[14]提出的VFPSA進行對比分析。兩種算法在同等實驗條件(如表1所示,其中dip指仿真環境中界面中節點的坐標位置)下進行,比較兩種算法下隨著部署時間的變化網絡的覆蓋率、重疊率、節點行走總距離及部署時間。 表1 實驗參數設置 3.3.1 對比算法描述 文獻[14]提出的基于虛擬力的精確部署算法(VFPSA)用于實現移動傳感器網絡的自動化精確部署。該算法研究的是基于全向傳感器節點模型,能實現精確部署,但只考慮了節點的移動沒考慮旋轉;而本文研究的是針對有向異構節點,不僅考慮節點移動還同步考慮節點的旋轉。 3.3.2 覆蓋率對比 兩種算法在同等實驗參數(如表1所示)下,通過式(3)得出不同時刻的覆蓋率變化軌跡如圖8所示。 從圖8可以看出,本文提出的算法在實現精確部署的同時,覆蓋率比VFPSA提升4.4%,主要因為是節點通過旋轉使覆蓋更為合理。 3.3.3 重疊率對比 兩種算法在同等實驗參數(如表1所示)下,通過式(4)得出不同時刻的重疊率,如圖9所示,其中,時間坐標0刻度以節點都移動到指定路徑后為基準。 圖8 覆蓋率比較 圖9 重疊率比較 從圖9可以看出,本文算法在達到精確部署的同時節點的重疊率比VFPSA平均下降了3.4%,主要原因是節點通過旋轉微調,使重疊進一步減少。 3.3.4 平均移動距離對比 兩種算法在同等實驗參數(如表1所示)下,通過式(5)得出不同時刻的距離平均值。以時間為基準的網絡節點行走總距離平均值的變化軌跡,如圖10所示。 圖10 行走距離比較 從圖10可以看出,部署第一階段(節點未移動到路徑中)兩種算法行走的總距離相差不大,進入第二階段(節點已經移動到路徑中)后本文算法的行走距離要比對比算法的短,減少2.1%,主要原因是因為采用了旋轉優先策略,在出現重疊的情況下,優先通過旋轉解決重疊。由于移動相比旋轉會消耗更多的能量,所以本算法最終要消耗的能量要少。 3.3.5 部署時間對比 兩種算法在同等實驗參數(如表1所示)下,通過隨機拋灑不同的節點數量對比各自部署所需要的時間。以節點數量為基準的部署時間的變化軌跡,如圖11所示。 從圖11可以看出,本文提出的算法在不同規模節點數量的情況下相比VFPSA需要更少的部署時間,平均減少4.3%。主要原因是在部署過程中,節點只通過移動方式進行部署會在虛擬力邊界出現局部最小問題,節點來回震蕩無法平衡穩定,DHPSA通過旋轉優先,減少了只移動節點帶來的不穩定問題。 圖11 部署時間比較 針對有向異構傳感器網絡精確部署問題,本文提出了一種基于虛擬力實現節點移動和旋轉的精確部署算法,通過信號量控制節點的移動和旋轉,從而達到更高的覆蓋率及更低的重疊率。實驗仿真結果表明,該算法能夠實現精確部署且與VFPSA相比在覆蓋率、重疊率、移動距離及部署時間具有更優的性能,下一步工作將圍繞三維空間有向異構傳感器網絡部署問題進行深入研究。 References) [1] CARDEI M, WU J. Energy-efficient coverage problems in wireless Ad-Hoc sensor networks [J]. Computer Communications, 2006, 29(4): 413-420. [2] THAI M T, WANG F, DU D H, et al. Coverage problems in wireless sensor networks: designs and analysis [J]. International Journal of Sensor Networks, 2008, 3(3): 191-200. [3] CHOW K Y, LUI K S, LAM E Y. Wireless sensor networks scheduling for full angle coverage [J]. Multidimensional Systems & Signal Processing, 2009, 20(2): 101-119. [4] LI Y, GAO S. Designingk-coverage schedules in wireless sensor networks [J]. Journal of Combinatorial Optimization, 2008, 15(2): 127-146. [5] MA H D, LIU Y H. On coverage problems of directional sensor networks [C]// Proceedings of the 2005 International Conference on Mobile Ad-Hoc and Sensor Networks. Berlin: Spring, 2005: 721-731. [6] 陶丹,馬華東,劉亮.基于虛擬勢場的有向傳感器網絡覆蓋增強算法[J].軟件學報,2007,18(5):1152-1163.(TAO D, MA H D, LIU L. A virtual potential field based coverage-enhancing algorithm for directional sensor networks [J]. Journal of Software, 2007, 18(5): 1152-1163.) [7] 譚勵,楊朝玉,楊明華,等.改進的有向傳感器網絡多中心部署算法[J].計算機應用與研究,2016,33(12):3797-3800.(TAN L, YANG C Y, YANG M H, et al. Covering research to directional sensor networks based on deployment of multi-center [J]. Application Research of Computers, 2016, 33(12): 3797-3800.) [8] 譚勵,陳玉程.復雜區域的有向傳感器網絡覆蓋優化算法[J].計算機工程,2015,41(4):14-18.(TAN L, CHEN Y C. Coverage optimization algorithm for directional sensor network in complex area [J]. Computer Engineering, 2015, 41(4): 14-18.) [9] 劉志強,沈廼桐,毛強,等.無線傳感器網絡動態覆蓋的CVT算法[J].傳感器與微系統,2015,34(6):115-118.(LIU Z Q, SHEN N T, MAO Q, et al. A dynamic coverage algorithm for wireless sensor networks based on CVT [J]. Transducer and Microsystem Technologies, 2015, 34(6): 115-118.) [10] 方芳,陳世平.無線傳感器網絡中多目標優化節點部署模型[J].計算機應用研究,2015,32(4):1166-1168.(FANG F, CHEN S P. Node deployment model of multi-objective optimization in wireless sensor networks [J]. Application Research of Computers, 2015, 32(4): 1166-1168.) [11] 金仁成,韋寧,徐浩,等.基于虛擬力的無線傳感器網絡分簇部署策略[J].東北大學學報(自然科學版),2014,35(5):640-644.(JIN R C, WEI N, XU H, et al. Clustering dynamic deployment strategy based on virtual force in wireless sensor networks [J]. Journal of Northeastern University (Natural Science), 2014, 35(5): 640-644.) [12] 王學軍.一種改進的無線傳感器網絡節點部署方案[J].計算機工程,2012,38(19):82-84.(WANG X J. An improved node deployment scheme in wireless sensor network [J]. Computer Engineering, 2012, 38(19): 82-84. [13] 黃月,吳成東,張云洲,等.基于移動節點的無線傳感器網絡覆蓋優化[J].東北大學學報(自然科學版),2012,33(2):165-168.(HUANG Y, WU C D, ZHANG Y Z, et al. Coverage optimization of wireless sensor networks based on mobile nodes [J]. Journal of Northeastern University (Natural Science), 2012, 33(2): 165-168.) [14] 楊明華,曹元大,譚勵,等.一種移動傳感器網絡精確部署算法[J].北京理工大學學報,2009,29(1):27-31.(YANG M H, CAO Y D, TAN L, et al. A precision deployment algorithm in mobile sensor network [J]. Transaction of Beijing Institute of Technology, 2009, 29(1): 27-31.) [15] ZOU Y, CHAKRABARTY K. Uncertainty-aware and coverage-oriented deployment for sensor networks [J]. Journal of Parallel & Distributed Computing, 2004, 64(7): 788-798. This work is partially supported by the Beijing Natural Science Foundation (4132025), the National Natural Science Foundation of China (61402022), the Beijing Philosophy Social Science Planning Project (14JGB033). XUZhongming, born in 1993, M. S. candidate. His research interests include wireless sensor network. TANLi, born in 1980, Ph. D., professor. Her research interests include wireless sensor network, intelligent information network, machine learning. YANGChaoyu, born in 1990, M. S. candidate. Her research interests include wireless sensor network. TANGXiaojiang, born in 1994, M. S. candidate. His research interests include wireless sensor network. Nodecoverageoptimizationalgorithmindirectionalheterogeneouswirelesssensornetwork XU Zhongming, TAN Li*, YANG Chaoyu, TANG Xiaojiang (SchoolofComputerandInformationEngineering,BeijingTechnologyandBusinessUniversity,Beijing100048,China) Concerning covering loopholes and uneven local deployment, a Directional and Heterogeneous Precision Self-deployment Algorithm (DHPSA) was proposed. Autonomous deployment process was divided into two stages. Firstly, a node moved to the destination path by choosing the optimal route in real-time under virtual forces of neighbor node and specified path. Then, through autonomous rotation and autonomous moving, the location of the node was finely tuned under joint virtual force of neighbor nodes and the accurate coverage of the target path was realized finally. The contrast experiments show that, compared with the VFPSA (Virtual Force-based Precision Self-deployment Algorithm), the coverage rate of the proposed algorithm is increased by about 4.4 percent, the overlapping rate is decreased by about 3.4 percent, moving distance is reduced by about 2.1 percent and deployment time is reduced by about 4.3 percent. The simulation experiment results show that the proposed deployment algorithm can effectively increase the coverage rate, decrease the overlap rate and reduce energy consumption. directional heterogeneity; precise deployment; virtual force; node rotation; path coverage TP212.9 :A 2016- 12- 22; :2017- 02- 05。 北京市自然科學基金資助項目(4172013);國家自然科學基金青年項目(61402022);北京市哲學社會科學規劃項目(14JGB033)。 徐忠明(1993—),男,江西景德鎮人,碩士研究生,主要研究方向:無線傳感器網絡; 譚勵(1980—),女,廣西南寧人,教授,博士,CCF會員,主要研究方向:無線傳感器網絡、智能信息網絡、機器學習; 楊朝玉(1990—),女,山東梁山人,碩士研究生,主要研究方向:無線傳感器網絡; 唐小江(1994—),男,甘肅慶陽人,碩士研究生,主要研究方向:無線傳感器網絡。 1001- 9081(2017)07- 1849- 06 10.11772/j.issn.1001- 9081.2017.07.18493 實驗仿真與性能分析









4 結語