
低碳智能種植小車的設計與應用
2017-09-23 02:47:08楊博程清偉李慶鴻葉佐鎮李家輝謝順成
裝備制造技術 2017年7期
關鍵詞:智能
楊博,程清偉,李慶鴻,葉佐鎮,李家輝,謝順成
低碳智能種植小車的設計與應用
楊博,程清偉,李慶鴻,葉佐鎮,李家輝,謝順成
(華南理工大學廣州學院,廣東廣州510800)
低碳智能種植小車的設計,主要是為解決人工挖坑種植勞動強度大、效率低及大型機械化種植成本高、體積龐大靈活性低、性能不穩、無法大規模使用的問題。本設計在電氣控制上利用空氣壓縮機產生高壓空氣,并結合STM32系統控制電磁閥開閉來控制氣壓缸的往返運動,并且由WiFi232模塊對種植機進行無線遙控制電磁閥的開閉,再驅動在機械結構下完成挖口、投苗、覆土、鎮壓、鋪設滴灌植樹的一般流程,從而實現智能種植。
低碳;智能;種植;設計
國家林業局印發《國家林業局2016年工作要點》通知,我國全年計劃完成造林1億畝、森林撫育1.2億畝,實現林業產業總產值6.3萬億元、林產品進出口貿易額1 500億美元。這對于現有的人工裝備,種植工作任務大,作業季節性強,僅育苗一項,人工就無法滿足要求。實踐表明,由機械智能化植樹造林才能最大限度地提高生產率,降低生產成本,提高造林成活率。此外,發展植樹造林的“未來產業”,將有效地解決生產過剩、勞動力過剩的矛盾,大大緩解“現在產業”市場競爭的壓力,促使有序競爭和有效管理體系建立起來,為“未來產業”發展提供物質保障。但是我國在樹苗種植方面,還是以人工為主,機械為輔,而國內目前的植樹機體積巨大,性能不穩,成本高。基于以上情況,設計出適用于林業與農業的智能化、低成本的低碳智能種植小車。
1 低碳智能種植小車的基本組成及工作原理
低碳智能種植小車主要由底盤搭載平臺裝置、種植裝置、覆土壓實裝置、自動投苗裝置、澆水工作模塊、空氣壓縮機裝置,傳感器模塊、電機及驅動模塊及無線WIFI遠程控制模塊。
其工作原理:低碳智能種植小車的智能系統是采用STM32系統控制,智能系統的人機交流界面可以設定農作物行間距、株間距、種植的深度,并通過小車上的檢測裝置檢測到土壤的溫度、濕度。智能種植小車根據所檢測數據,傳輸到智能控制系統處理并作出判斷,是否對種植環境給予改造。智能種植小車在改造種植環境時可通過控制小車澆水的澆水裝置給農作物適當的水量并可提高農作物的成活率。低碳智能小車在種植系統控制、土壤監測、農作物種植、澆水等功能方面,實現了智能種植的過程。
低碳智能種植小車的機械結構及電氣控制上是利用空氣壓縮機產生高壓空氣,通過STM32系統控制電磁閥開閉來控制氣壓缸的往返運動,并且由智能系統中的程序控制電磁閥的開閉,從而完成低碳智能種植小車在挖口、投苗、覆土、鎮壓、鋪設滴灌等植樹環節。低碳智能種植小車在農作物運輸、投苗、種植、壓實、澆水過程集為一體,同時智能小車中的工作模塊與控制模塊分開,從而減輕了小車重量,使智能種植小車更加靈活方便,工作效率更高。智能種植小車的控制模塊可通過人為手持遙控,通過WiFi模塊發送指令及接收機器工作狀況,根據智能小車的工作情況調整相關參數,以實現小車運行方面得以最佳。低碳智能種植小車的工作原理如圖1所示。
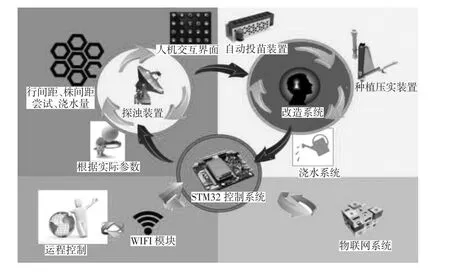
圖1 低碳智能種植小車的工作原理
2 小車智能模塊工作過程
2.1 智能種植裝置
智能種植裝置由空氣壓縮機、氣壓缸、種植管、電磁閥繼電器和滑軌組成,空氣壓縮機工作時產生高壓空氣從而推動氣壓缸活塞上下運動實現種植挖口。智能STM32控制系統銜接繼電器,利用小電流控制大電流的方式控制電磁閥的開閉來控制氣壓缸的工作狀態,然后電磁閥進氣帶動種植槍快速平穩往下運動,使種植槍插入土中,完成挖種植坑的流程。
2.2 覆土壓實裝置
覆土壓實裝置利用杠桿原理將種植槍口打開,并對種植坑進行擴大,同時植物從種植槍中滑落至種植坑中,然后種植氣壓缸帶動種植槍上升,最后由壓實氣壓缸帶動填土機構進行覆土壓實并將種植槍口關閉。圖2為種植及壓實機構三維模型圖。

圖2 種植及壓實機構三維模型
2.3 自動投苗裝置
智能種植小車的自動投苗裝置主要由齒輪、齒條、步進電機、滑軌和放置苗圃的架子組成。控制該裝置的步進電機由STM32控制系統控制電機驅動,當步進電機正向轉動時,與轉子銜接的齒輪嚙合齒條攜帶放置苗圃的架子前進,在滑軌的約束下,往前移動,當苗圃到達投苗口時,投下苗圃至種植槍,與此同時,步進電機停止轉動,從而完成投苗的流程,等待下一投苗工作流程。
2.4 智能澆水裝置
智能澆水裝置是由水箱、水管、噴頭、水泵和電磁閥組成。小車在壓實機構工作完成后,通過STM32控制系統,控制電磁閥通斷電來控制水水泵的工作狀態。通過電磁閥來控制澆水,可以通過設置參數來調節水的流量,滿足不同苗圃對水分的要求,從而提高了苗圃的存活率,種植機水泵參數如表1.
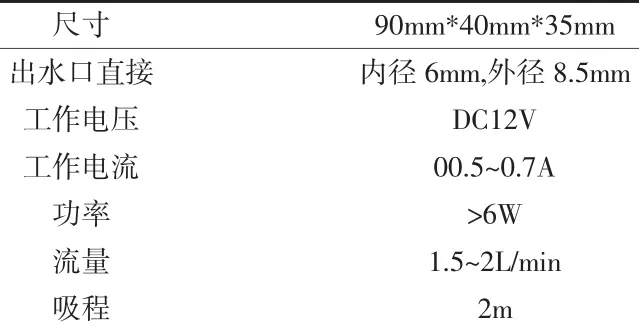
表1 水泵參數
2.5 氣壓控制裝置
氣壓控制裝置由一個便攜式充氣泵和儲氣瓶組成,小車氣壓工作時,蓄電池為便攜式充氣泵提供電能,使得便攜式充氣泵對氣瓶進行充氣。充氣泵與空氣壓縮機比較,充氣泵在結構上沒有儲氣的氣瓶,無法直接輸出高的氣壓。所以該機構上的氣瓶起到了存儲氣體和蓄壓的作用。當氣瓶內氣壓達到一定數值時,電磁閥控制氣體的進出及流量,達到輸出不同壓力的目的。
2.6 基于STM32系統控制原理
小車智能控制系統采用STM32處理芯片。利用WIFI232模塊對種植機進行無線遙控,首先采用L298電機驅動模塊驅動電機,實現機器人的運動,其次過STM32系統控制電磁閥開閉來控制氣壓缸的往返運動,并且由程序控制電磁閥的開閉完成挖口、投苗、覆土、鎮壓、鋪設滴灌植樹的一般流程。
2.7 探測系統
探測系統主要采用溫度,濕度傳感器,以及超聲波傳感器,該系統工作前完成探測任務,根據傳送回來的數據分析,對該區域的種植環境進行預判段,判斷對其改造的方向、程度,最大程度改善環境,一方面根據探測回來的數據,對土壤的溫度、濕度進行分析,探測的結果為后來改造做充足的準備。圖3是探測系統流程圖。
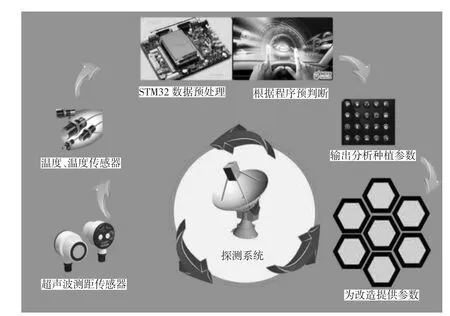
圖3 探測系統流程圖
3 智能小車工作效率分析
低碳智能種植小車對于人工種植和傳統的機械種植,工作效率有所提高,低碳智能種植小車選用的驅動電機的參數如下表2,通過相應的計算得出種植小車的工作效率。
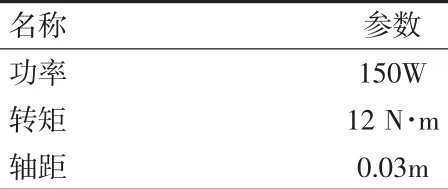
表2 電機參數
已知電機的輸出轉矩T、軸距L,可求得力F.
F=T/L=375 N
種植機的行走速度計算,根據電機的輸出功率P,以及驅動力F,可求得。
V=P/F=0.4 m/s
設定樹苗種植間隔b為1.5 m,挖坑種植一顆樹苗的時間t1為1 min,則種植一顆小樹苗需的總時間為t.
t=t1+1.5/0.4=63.75 s
一天工作8 h,車寬a為0.6,則可以算出植樹機一天的種植棵樹y和種植面積S:
y=8×3 600/63.75=451.8顆
S=aby=0.6×1.5×451.8=406 m2
與傳統的人工相比,圖4為低碳種植小車與傳統人工工作效率對比圖。
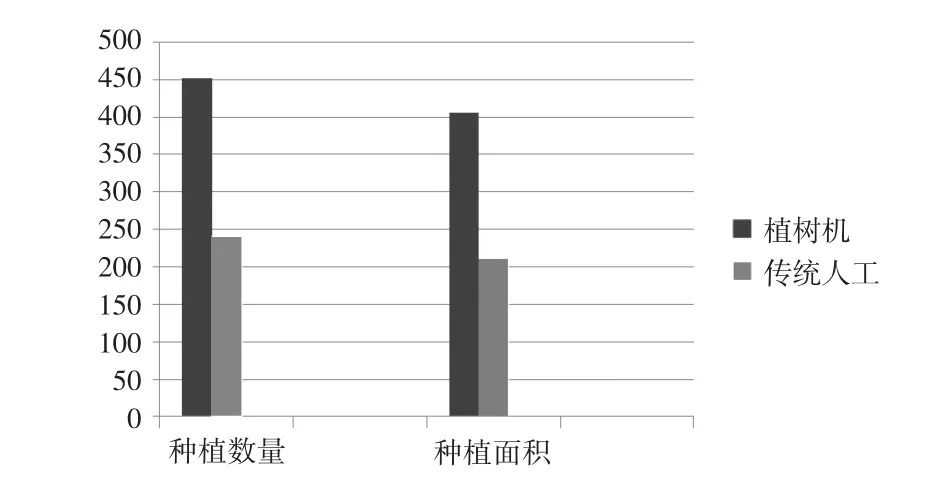
圖4 種植小車與傳統人工工作效率對比
4 結論
低碳智能種植小車是一款新型種植機器,旨在廣泛應用于林業農業。本設計采用氣動驅動,運用自動投苗,從而實現種植過程的運輸、投苗、種植、壓實、澆水的功能,減少對苗圃的損傷,提高苗圃的成活率。作為人口大國,我國對進口糧食瓜果極具依賴且木材供需矛盾日益尖銳,木材供不應求。新型植樹機通過無線遠程遙控控制智能化完成挖坑、投苗、覆土、鎮壓、鋪設滴灌等植樹一整套流程,降低勞動強度的同時大大減少農業瓜果種植的流程。
[1]廖廷茂,王為,李小昱.我國馬鈴薯種植機的現狀與分析[J].湖北農機化,2007(3):35-36.
[2]岳群.馬鈴薯種植機的設計與試驗研究[D].青島:青島農業大學,2016.
[3]M.Datta,N.P.Singh.印地安潮濕亞熱帶的多種用途樹種的生長特性以及農林系統中作物產量和土壤特性(英文)[J].Journal of Forestry Research,2007(4):17-26,84.
[4]董歡.農業機械化的微觀行為選擇及其影響因素——基于農戶稟賦及種植環節的實證分析[J].農村經濟,2015(7):85-90.
[5]金磊.大蒜種植機械設計[D].北京:中國農業大學,2007.
The Design and Application of low Carbon Intelligent Planting Trolley
YANG Bo,CHENG Qing-wei,LI Qing-hong,YE Zuo-zhen,LI Jia-hui,XIE Shun-cheng
(South China University of Technonlogy of Guangzhou,Guangzhou 510800,China)
The design of low carbon intelligent car is growing,high labor intensity,low efficiency and high cost,large mechanized planting large volume flexibility is low,performance is not stable,not large-scale use in order to solve the problem of artificial digging planting.The design of the electrical control using air compressor to generate high pressure air,and combined with the movement of STM32 system to control the electromagnetic valve to control the pneumatic cylinder,and by the WiFi232 module of planting machine to open and close and then drive to complete export,investment and general process of digging seedlings,soil,planting trees,laying drip suppression in mechanical structure wireless remote control solenoid valve,so as to realize intelligent planting.
low carbon;Intelligence;plant;design
S223.99
A
1672-545X(2017)07-0111-03
2017-04-25
廣東大學生科技創新培育科技發明類重點項目(編號:pdjh2017a0961)
楊博(1996-),男,本科在讀,主要研究方向為車輛工程;程清偉(1988-),男,廣東湛江人,碩士,實驗師,高級技師,主要研究方向為車輛工程。
猜你喜歡
開放教育研究(2021年3期)2021-05-25 02:41:06
小學科學(學生版)(2020年12期)2021-01-08 09:28:04
裝備制造技術(2020年4期)2020-12-25 05:26:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
能源(2018年4期)2018-05-19 01:53:44
