電磁驅動磁懸浮式片梭引緯模式的建立與實驗
2017-09-25 11:53:56吳曉光雷小龍孔令學
紡織學報 2017年9期
吳曉光, 袁 博, 雷小龍, 張 馳, 孔令學
(1. 武漢紡織大學 機械工程與自動化學院, 湖北 武漢 430073; 2. 迪肯大學 國家創新重點實驗室, 澳大利亞 吉朗 3217)
電磁驅動磁懸浮式片梭引緯模式的建立與實驗
吳曉光1, 袁 博1, 雷小龍1, 張 馳1, 孔令學2
(1. 武漢紡織大學 機械工程與自動化學院, 湖北 武漢 430073; 2. 迪肯大學 國家創新重點實驗室, 澳大利亞 吉朗 3217)
針對片梭織機在采用扭軸式投梭方式時存在的沖擊大、效率低、能耗高等問題,提出一種多級式電磁投梭原理。根據電磁投射理論,建立了電磁投梭引緯的基本方案及片梭的投射/制動模型。通過理論模型、實驗驗證及仿真分析,得出多級電磁投梭的效率優于機械式投梭的結論;為使片梭在高速引緯時保持運動穩定性,提出了片梭磁懸浮筘座陣列系統。建立了電磁投梭與懸浮筘座的理論模型,分析了片梭的速度、加速度及其電磁場耦合特性。同時進行了電磁驅動加速試驗、ANSYS有限元分析,驗證了電磁驅動投梭引緯的可行性,實現以電代機“零傳動”片梭引緯模式。
電磁投梭; 引緯; 磁懸浮筘座陣列; 片梭織機
片梭織機是一種用于高端織物的紡織機械,可適用紗線范圍廣,可織造復雜的提花織物、服飾和工業用寬幅織物。迄今為止,國內外片梭織機的關鍵技術——片梭投梭原理主要是由機械式扭軸投梭機構實現(瑞士Sulzer公司)[1]。它利用機械機構儲能,通過扭軸將梭體高速投射,以滿足片梭織機的編織工藝要求。由于機構原理的限制,扭軸投梭機構運動時沖擊力大,噪聲大,摩擦能耗高,因此,扭軸式投梭機構機速及投梭效率低。由文獻[2]可知,其最大機械效率僅為18.3%。由此可見,若要在現有投梭機構上進一步提升投梭效率,則必然會受到機構原理及材料性能上的限制。
電磁投射的最大特點在于利用電磁力瞬間將物體加速投射(如:澳大利亞國立大學以軌道炮的方式將質量為3.3 g的彈丸以5.9 km/s的速度投射[3];美國Sandia Lab以電線圈加速的方式將18 kg的彈丸加速至420 m/s[4]),且具備在加速過程中彈丸的加速度可控、無機械傳動、噪聲小、投射效率高等特點,因此,本文提出一種將電磁投射與磁懸浮原理相結合的引緯模式。該模式基于電磁投射的基本原理,通過電磁線圈將片梭高速投射,并在片梭經過筘座磁懸浮陣列系統時將梭體懸浮,實現引緯過程。通過以電代機的“零傳動”模式,取代機械式投梭引緯,提出一種新的織機引緯編織理論及方法。
1 電磁驅動投梭/制梭原理與結構
1.1電磁驅動投梭基本模式
現有的片梭織機是利用梭體作為引緯器,由若干片梭依次從供緯側將緯紗引入梭口。圖1(a)所示結構為片梭織機的扭軸式投梭機構,投梭動力來自扭軸加扭時儲存的彈性位能,投梭棒釋放后擺回,將片梭擊出。片梭完成一次引緯過程后,通過油壓緩沖器對片梭進行制動,完成編織動作循環[5]。在片梭擊出后,一系列筘座將片梭約束在前進方向上。上下層紗線呈一定角度交錯布置,筘座布置在上下層紗線中間,如圖1(b)所示。
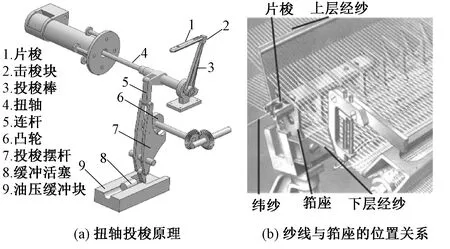
圖1 現有的片梭織機原理與紗線布置Fig.1 Present projectile loom and yarn arrangement.(a) Torsion bar weft insertion principle; (b) Position relation between yarn and sley
本文擬采用多級電磁驅動的磁懸浮式片梭雙向引緯方案,如圖2所示。圖中多級電磁驅動線圈分級提供瞬時電磁推力,滿足片梭在投梭過程中的加速要求,以及制動過程中的減速要求。由于投射后的引緯距離較長,片梭在引緯過程中會受到重力等外界因素的影響,使片梭偏離預定的運動軌跡,影響到另一端的接梭、制動片梭的過程,因此,需要磁懸浮筘座陣列以無摩擦的方式使片梭的運動軌跡穩定在如圖2所示的軸向中心處,其波動量通過反饋控制系統控制在誤差范圍內。
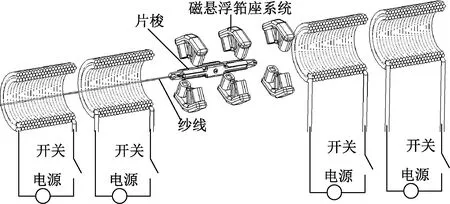
圖2 電磁驅動磁懸浮式投梭原理圖Fig.2 Principle of electromagnetic drive magnetic suspension projectile
根據上述電磁驅動與懸浮片梭引緯原理的結構關系,當紗線被送入片梭后,片梭經由多級電磁線圈組同步加速發射,在通過多級磁懸浮筘座陣列時,筘座與片梭相互的電磁力使片梭保持平衡,以高速狀態通過筘座系統,實現無摩擦方式投梭及引緯;當片梭到達制動位置時,系統以減速模式完成片梭制動,并剪斷紗線,完成一次電磁驅動懸浮式引緯過程。下一引緯過程中,投梭線圈組與制動線圈組在功能上互換,實現雙向引緯。經紗的排布與普通片梭織機中經紗的排布方式有所區別,上下層經紗之間呈一定夾角交錯排布在磁懸浮筘座內部,如圖3所示。當引緯過程結束后,在打緯過程中,緯紗從筘座的右側開口脫出,筘座則保持靜止,通過獨立的、打緯片陣列移動、前擺代替普通片梭織機中的筘座前擺。打緯片采用非磁性金屬或非金屬材料制作,避免干擾到片梭或筘座的磁場。
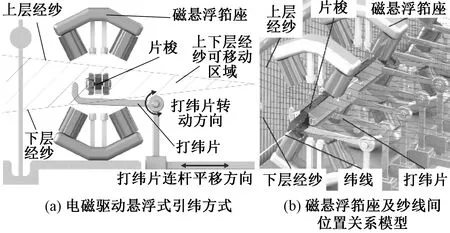
圖3 電磁驅動懸浮式引緯方式與磁懸浮筘座及紗線間位置關系模型Fig.3 Electromagnetic drive suspension weft insertion method (a) and position relation model between magnetic suspension sley and yarn (b)
由以上電磁驅動懸浮式引緯模式可見,與機械式扭軸儲能驅動投/制系統相比,其結構簡單,投制效率高,且可以去除扭軸式投/制時復雜的機械傳動機構。
1.2電磁驅動投梭原理
本文采用電磁驅動的磁阻式投梭原理[6],片梭在線圈內部的位置與電磁力方向之間的關系如圖4所示。片梭材料選用鐵磁性材料,鐵磁性材料受電磁力方向與正向磁場梯度方向相同,當片梭處于線圈左側時(投梭起始位置),電磁力正向做功,片梭向右投射;反之,電磁力反向做功,對片梭進行減速,實現片梭的制動。
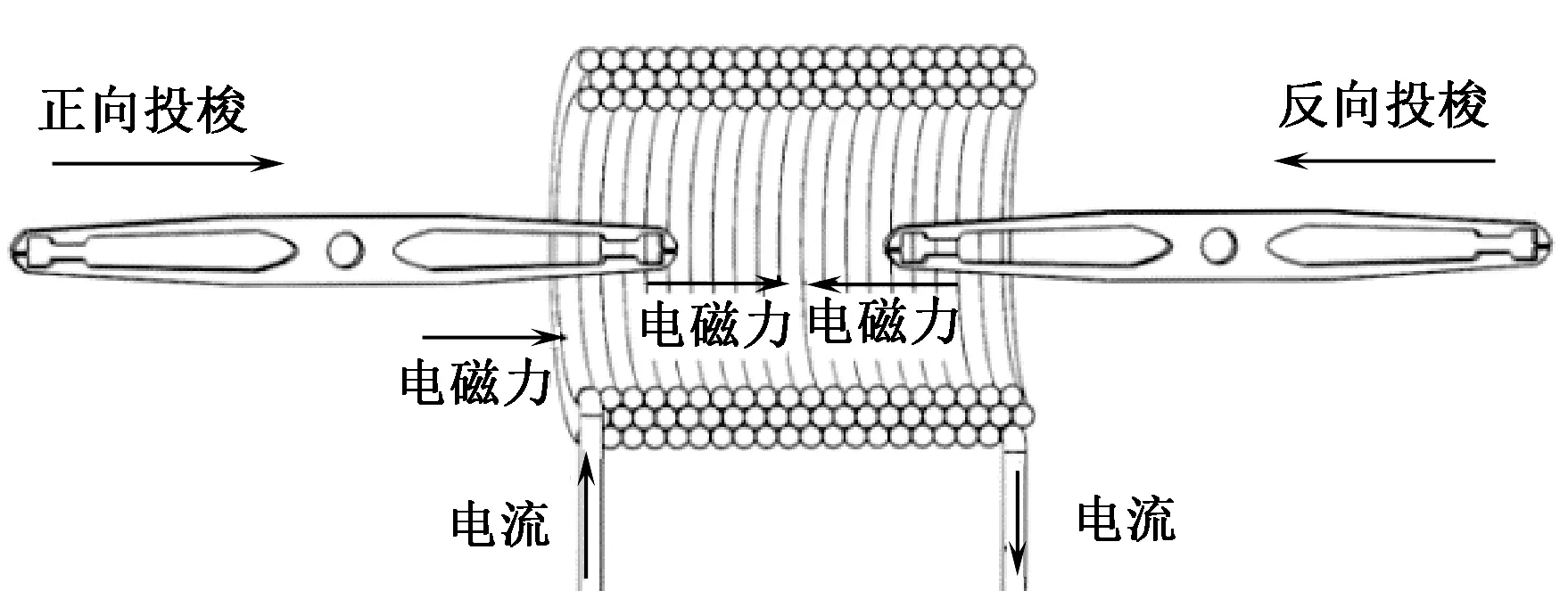
圖4 電磁驅動原理Fig.4 Electromagnetic driving principle
由電磁學理論[7]可知,當通電瞬間,線圈內產生的磁通密度B沿軸向的分量為

(1)
式中:n為單位長度內的匝數,n=N/L,N為線圈的總匝數,L為線圈的長度,m;I為線圈電流,A;μ0為空氣的磁導率;β1和β2為線圈內部軸線上片梭所在位置與線圈兩端構成的夾角。
式(1)中線圈每匝的磁通量Φ為
(2)
式中:R為線圈的半徑,m;S為線圈內部橫截面積,m2。在線圈內部,總磁通匝鏈數Ψ為
(3)
通電線圈產生的磁動勢為
Fm=Ni=ΦRm
(4)
式中,Rm為磁阻,H。Rm=lm/μA,μ為片梭材料的磁導率;lm為片梭磁路長度,m;A為片梭磁路橫截面積,m2。對于線圈,磁通量Φ是常量,Φ與Ni的關系式是線性的,則線圈中儲存的磁能Wm為

(5)
由式(5)可知,磁場儲存的磁能Wm是關于磁通Φ和磁阻Rm的函數,即Wm=fΦ,Rm。根據虛功原理可推導出片梭在線圈中受力的表達式,即對式(1)沿運動軸線的x方向進行微分,即可獲得驅動線圈對片梭產生的推力:

(6)
式中,dΦ/dx為磁通量隨位移的變化率。
同時,對于處在磁場中的片梭,其內部的磁感應強度為
B=μH-μ0μrH
(7)
式中:μr為片梭材料的磁導率;μ為相對磁導率;H為線圈內部的磁場強度,B。
根據式(7)可知,片梭內部的磁感應強度與材料的磁導率有關,又根據式(2)、(6)可知,材料的磁導率與材料在磁場中的磁感應強度成正比,而材料的磁感應強度和片梭受到的推力成正相關,因此,提高材料的導磁率,可以顯著增大片梭所受推力,提高片梭投射過程的效率,提高發射初速度。通過分析,初步將片梭材料選擇為具有較高磁導率、飽和磁通密度的1008低碳鋼。
2 磁懸浮片梭引緯原理與結構
由于多級電磁式投梭比機械式扭軸投梭機構的投梭速度(小于35 m/s[8])大,因此,需要設計新的筘座,以減小片梭與筘座間的摩擦力。磁懸浮筘座是由電磁-永磁結構混合組成的電磁懸浮裝置。當片梭被投射進入筘座陣列系統后,梭體在磁場力的作用下克服重力,在筘座內部的中心位置保持懸浮狀態[9]。通過梭體與筘座之間的非接觸式的引緯關系,實現梭體與筘座間運動無摩擦。據此,片梭通過多級磁懸浮筘座系統而實現高速、穩定的引緯工作模式,實現“零傳動”引緯。
2.1磁懸浮筘座及片梭基本結構
磁懸浮筘座系統的結構如圖5所示。由圖可知,多級磁懸浮筘座陣列系統由多個筘座與線性霍爾感應器組成,其中每對筘座與梭體間均由電磁-永磁結構對應。圖5還示出筘座與經紗之間的位置關系。
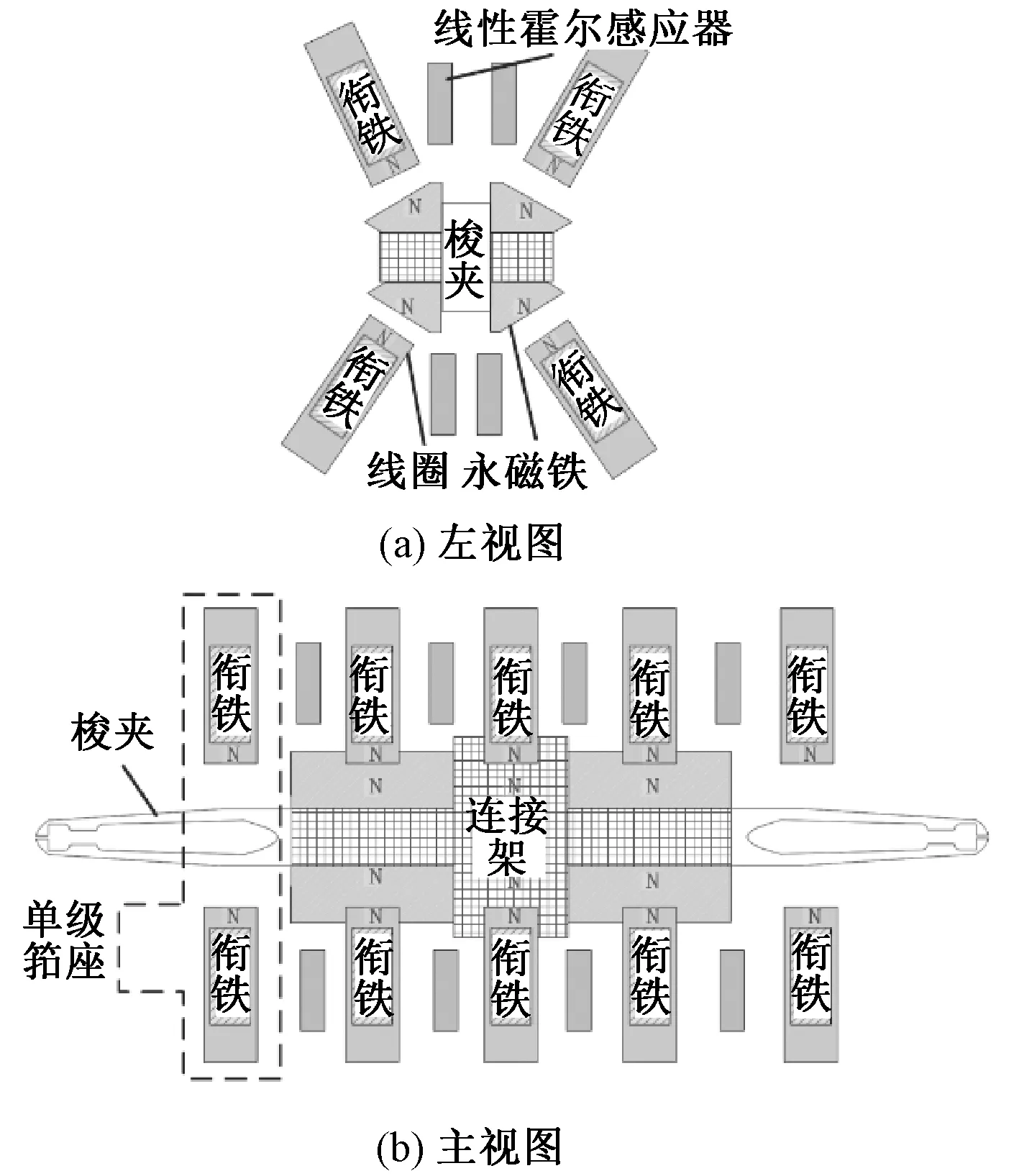
圖5 磁懸浮筘座系統結構圖Fig.5 Structure of magnetic suspension sley system.(a) Left view; (b) Main view
為防止梭體在高速運動過程中產生磁阻干擾片梭的移動,以及減小片梭在飛行過程中產生的偏移,磁懸浮筘座的控制系統采用線性霍爾感應器對片梭在垂直方向與水平方向上的位置進行實時監測,并以此為反饋系統的輸入量,控制各個筘座線圈的通電時間及電流大小,進而調整片梭上每個永磁鐵所受的電磁力,使片梭在高速磁懸浮狀態通過筘座時處于所要求的運動軌跡。在考慮滿足雙向引緯與磁懸浮結構的要求后,片梭與筘座的結構設計如圖6所示。
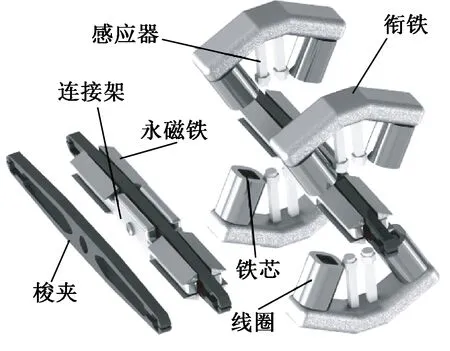
圖6 梭夾、磁懸浮片梭結構及磁懸浮筘座模型Fig.6 Model of gripper, projectile shuttle and magnetic suspension sley
梭夾的結構和尺寸與傳統片梭織機上使用的梭夾相似,但為前后對稱的結構。片梭長度為89 mm,前后各布置了4個截面為等腰直角三角形的永磁鐵,永磁鐵與片梭間通過鋁質連接架連接。
2.2磁懸浮筘座的基本結構
為了確定片梭在筘座中的受力情況,首先建立筘座中單塊永磁鐵與線圈磁極之間的作用力
(8)
式中:q1和q2分別為兩磁極的磁極強度,A·m;r為兩磁極間的距離;μ0為空氣的導磁率。由此可推導出兩磁極間的作用力Fa1、Fa2以及永磁鐵對銜鐵的作用力Fb。
Fa1=mg+Fa2
(9)
式中:m為片梭的質量;g為重力加速度;Fa1為下端電磁線圈磁極對下端永磁鐵磁極的作用力,N;Fa2為上端電磁線圈磁極對上端永磁鐵磁極的作用力,N。

(10)
式中:r1為線圈與底部永磁鐵磁極間的距離;r2為線圈與頂部永磁鐵磁極間的距離。
永磁體對鐵芯的作用力為
Fb=HSJ
(11)
式中:H為片梭端面處永磁鐵的磁場強度,B;S為片梭端面處永磁鐵的面積,m2;J為鐵芯被永磁鐵磁化的磁化強度。


(12)
為了使片梭懸浮,需要滿足以下條件:
Fa1+Fb2=mg+Fa2+Fb1
(13)
式中:Fb1為永磁鐵與下端鐵芯間的作用力;Fb2為永磁鐵與上端鐵芯間的作用力。通過上述方程,可以確定實現片梭穩定懸浮所需要的參數,據此完成片梭懸浮控制系統的設計。
3 電磁投/制仿真分析及實驗
3.1仿真分析及初始參數設置
根據上述電磁投射原理,使用電磁場有限元分析軟件Ansoft Maxwell對磁懸浮筘座模型進行動態電磁力及運動仿真分析[10],創建了電磁投射片梭/制動裝置的仿真模型。線圈外徑為31.2 mm,內徑為20 mm,長度為50 mm,匝數為600。電容值為1 000 μF,發射電壓為200 V,片梭質量為24.26 g,長度為 89 mm,材料為1008鋼,具體結構如圖6所示。并設置為當片梭中心移動至線圈中點時片梭所在級線圈斷電。由于在引緯過程中紗線的實時張力會隨初始張力、片梭的加速度、速度等因素改變,因此,在此仿真模型中,并未涉及到紗線張力對片梭運動的影響。
3.2片梭加速仿真及分析
從片梭多級加速仿真的結果看,其參數設置成電壓為200 V,電容為1 000 μF的情況下,經過5級電磁線圈加速后,總共耗時約30 ms,片梭的速度從0升至41.77 m/s,片梭在加速過程中的最大加速度為3 714 m/s2。各級的速度變化與最大加速度如表1所示。
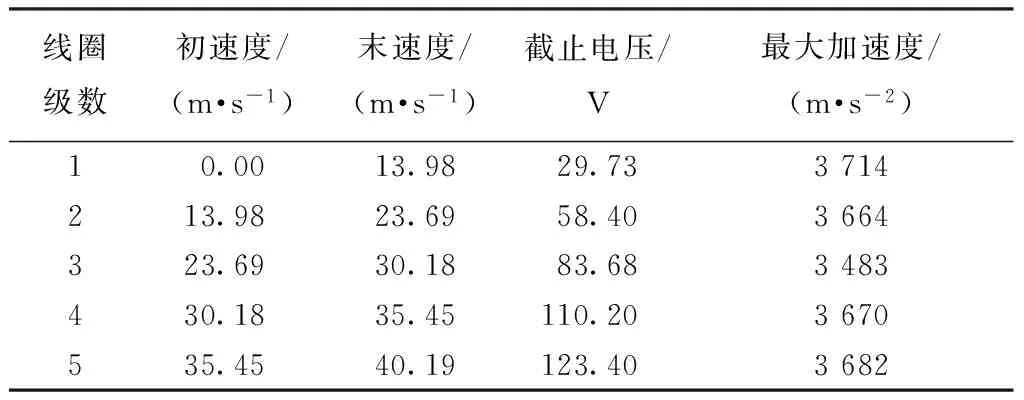
表1 多級加速過程仿真速度及最大加速度變化Tab.1 Simulation speed and maximum acceleration of multi-stage acceleration process
片梭多級減速仿真結果如表2所示,在電壓為200 V的情況下,經過4級電磁線圈加速后,總共耗時約20 ms,片梭的速度從40 m/s降至0。各級的速度變化與最大加速度如表2所示。在整個加速過程中,線圈最大瞬時電流為27.8 A。
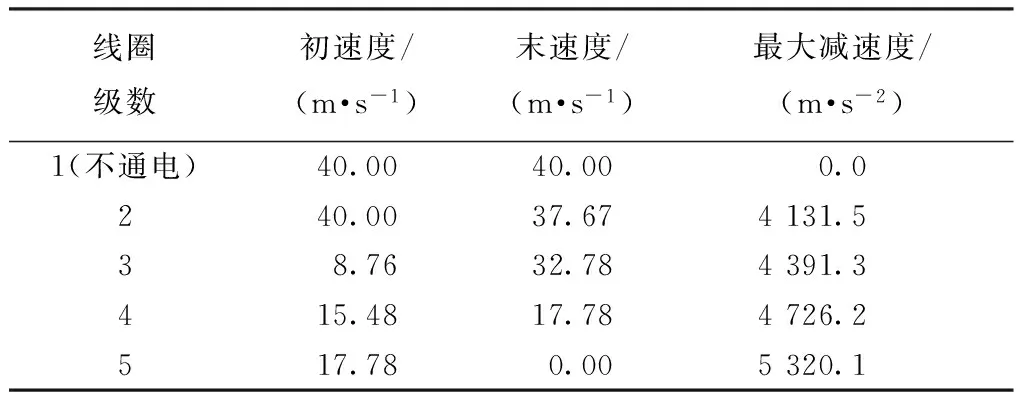
表2 多級減速過程仿真速度及最大減速度變化Tab.2 Simulation speed and maximum reduction speed changeTable of multi-stage deceleration process
根據式(14)計算得出電磁投射的效率η為27.9%。高于扭軸式投梭機構的18.3%,且通過優化線圈參數及片梭的外形,具有進一步提高效率的空間。

(14)
式中:v為片梭的速度,m/s;m為片梭的質量,kg;C為電容組的電容值,F;U為發射時電容的電壓值,V。
如表1所示,電磁投射片梭的最大加速度為3.714 km/s2,遠小于扭軸式投梭機構。以Sulzer PT7 100片梭織機為例,在紗線靜態張力(static tension)為7.5 cN時,引緯過程中片梭的最大加速度約為18 km/s2,峰值的動態張力(dynamic tension)約為210 cN,平均動態張力約為76 cN[11],由于電磁投射片梭的最大加速度較小(3.714 km/s2,遠小于18 km/s2),因此,與扭軸式投梭機構相比,在引緯過程中紗線的最大動態張力會顯著降低,加載到片梭上的瞬時沖擊也較小,能夠使片梭具有更長的使用壽命。
3.3片梭磁場的有限元分析
由于鐵磁性材料的片梭相對磁導率(μ=7 000~10 000)遠大于空氣(μ0=1),因此,絕大多數磁場強度H都集中在片梭周圍,最大處為10.018 kA/m;磁感應強度B最大值出現在片梭表面,最大處為1.51 T,如圖7所示。由于片梭外形不規則,所以片梭周圍的磁場強度及內部的磁感應強度都無法通過公式推導得到一個解析解,只能通過有限元的方式進行數值計算。同時注意到,在通電線圈中的片梭,其內部部分區域磁感應強度幾乎已達到片梭材料的飽和磁感應強度,因此,調整片梭的結構外形以及繼續選擇更適合的片梭材料將是進一步研究的重點。
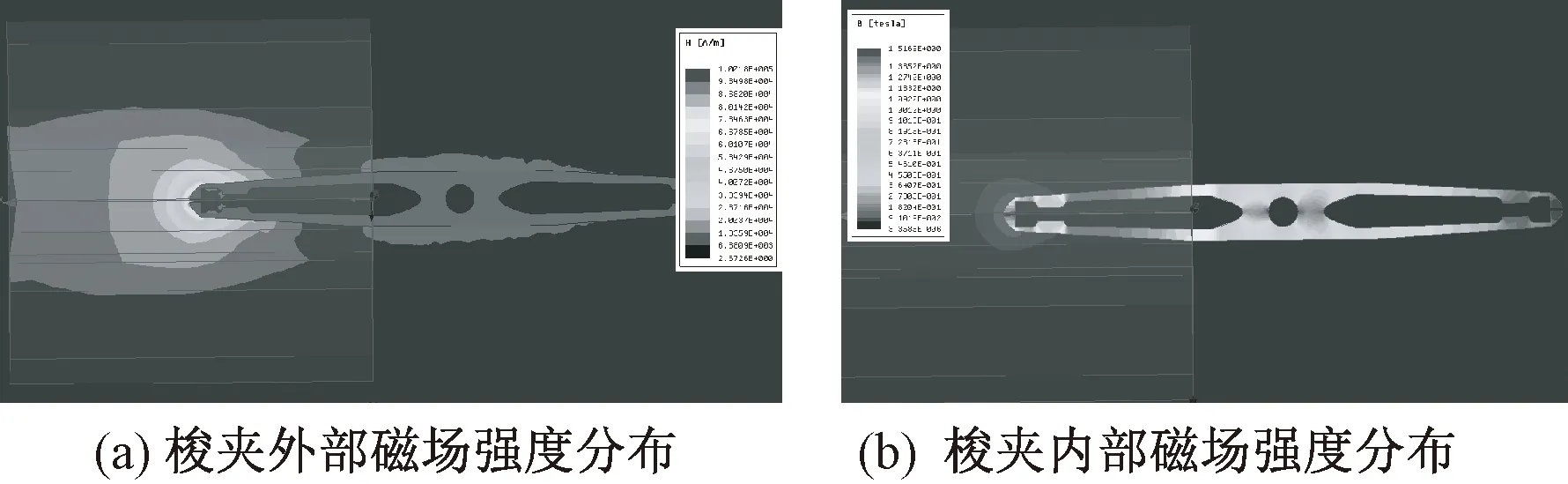
圖7 梭夾在線圈內部的磁場分布Fig.7 Distribution of magnetic field. (a) External magnetic field intensity distribution; (b) Internal magnetic induction intensity distribution
3.4電磁投射系統實驗
片梭電磁投射實驗平臺與測速系統如圖8所示。測速系統是通過測出加速完成后的片梭到達2個間距固定的光電傳感器的時間差,計算出片梭在這段距離內的平均速度以完成測速過程。電磁投射實驗平臺中各元件的參數與有限元仿真的參數相同。目前實驗平臺只完成了2級發射線圈的搭建,因此,以2級發射線圈進行實驗,對理論模型進行驗證,實驗所獲得的片梭出口速度結果如表3所示。
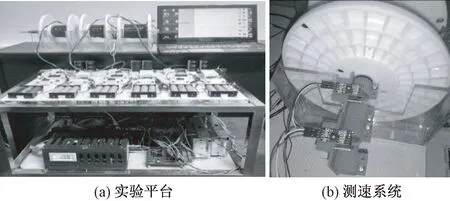
圖8 電磁投射實驗平臺Fig.8 Electromagnetic projection experiment platform.(a) Experimental platform; (b) Speed measuring system

發射電壓/V所用級數出口速度/(m·s-1)200112.4200221.7
從表3可看出,有限元仿真結果與實驗結果基本一致,相差較小(仿真結果為1級速度13.98 m/s,2級速度為23.69 m/s),驗證了模型的正確性。
4 磁懸浮片梭引緯原理與結構
根據單個磁懸浮筘座的原理及結構,使用電磁場有限元分析軟件Ansoft Maxwell對磁懸浮筘座模型進行靜態磁場力仿真分析。通過電磁有限元仿真,分析片梭在不同位置時受到筘座對片梭的最大電磁力,驗證磁懸浮筘座系統的可行性。
4.1磁懸浮筘座的基本結構
磁懸浮筘座與片梭一樣,都是軸對稱結構。其仿真模型模型結構參數如下:磁懸浮筘座鐵芯的直徑為4 mm,長度為10 mm。纏繞鐵芯的線圈外徑為9 mm,內徑為4 mm,線圈長度為12 mm,匝數為1 008匝。磁懸浮筘座中的同側2個線圈夾角均為53.14°,2個線圈之間的距離為29.38 mm,如圖9所示。永磁鐵的磁感應強度為890 kA/m。
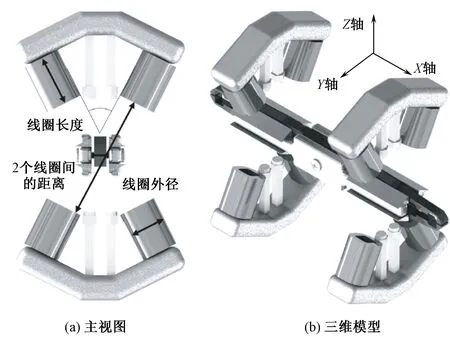
圖9 磁懸浮筘座模型Fig.9 Magnetic suspension sley model. (a) Main view; (b) Three-dimentional model
4.2仿真結果與分析
由筘座尺寸可以看出,片梭在Z軸方向上偏移超過3 mm就有可能與筘座發生碰撞,因此,對片梭在初始位置處于0、-1、-2、-3 mm時分別進行靜磁場力的仿真計算,得到了在不同線圈電流時片梭在Z軸方向上的受力情況,結果如表4所示。由于片梭質量約為24.26 g,可知在Z軸方向上需要約242.6 mN的力使片梭在運動過程中保持受力平衡。從表4可看出,當片梭偏移中心位置時,通電線圈能夠產生足夠的電磁力,使片梭在飛行過程中克服重力保持穩定,按照預定軌跡移動到電磁投梭系統的另一端,完成引緯過程。
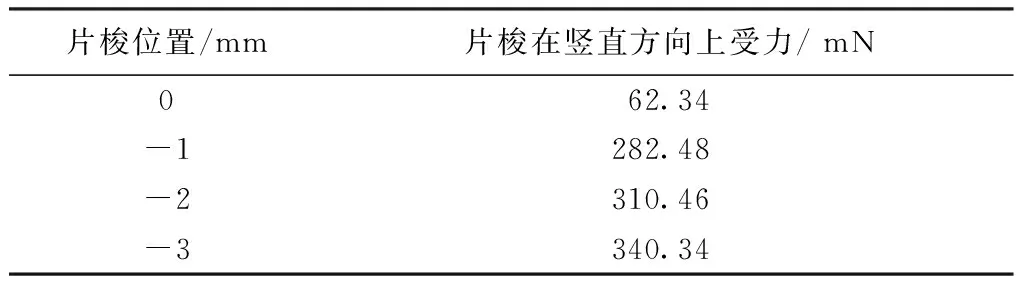
表4 片梭在不同位置受力表Tab.4 Stress at Shuttle in different positions
5 結 論
1)針對片梭織機上使用的機械式扭軸儲能投梭原理,本文提出一種基于電磁投射原理的高速磁懸浮式引緯模式。通過電磁投梭理論模型的論證、實驗及仿真,證明其投射效率遠高于機械式扭軸儲能投梭原理,論證了以電代機“零傳動”投梭的可行性,從而為該原理進入片梭引緯,提升織機的織造效率奠定了理論基礎。
2)針對處于高速運動狀態下的片梭,本文設計了磁懸浮筘座及多級筘座陣列系統,能夠通過片梭上永磁體與筘座線圈間磁場的相互作用,產生電磁力對片梭進行支撐懸浮,使投射后的片梭能夠在引緯過程中保持穩定,與筘座不接觸,實現無摩擦引緯。它能夠消除引緯過程中片梭與筘座間的摩擦阻力,提高引緯效率。
3)本文通過對電磁驅動磁懸浮式片梭引緯模式的研究與實驗,驗證了電磁投梭與懸浮式引緯相結合的這一新的片梭織機的引緯原理,為后續該模式實用化奠定理論與設計基礎。
FZXB
[1] 夏金國,李金海. 織造機械[M].北京:中國紡織出版社,1999:145-148. XIA Jinguo, LI Jinhai. Weaving Machinery[M]. Beijing: China Textile & Apparel Press, 1999:145-148.
[2] 徐浩貽. 片梭織機的技術進步[J]. 北京紡織,2003(4):43-46. XU Haoyi. Technical progress of projectile loom[J]. Beijing Textile Journal, 2003(4):43-46.
[3] DEIS D W, MCNAB I R. A laboratory demonstration electromagnetic launchers[J]. IEEE Transactions on Magnetic, 1981, 18(1): 16-21.
[4] 鄒本貴,曹延杰. 美軍電磁線圈發射技術發展綜述[J]. 微電機,2011,44(1):84-89. ZOU Bengui,CAO yanjie. Summary of electromagnetic coil launching technology development in American army [J]. Micromotors, 2011,44(1):84-89.
[5] 陳明. 扭軸投梭機構[J]. 華東紡織工學院學報,1981(4):48-55. CHEN Ming. Torsion bar weft insertion mecha-nism [J]. Journal of East China Institute of Textile Technology,1981(4):48-55.
[6] 王瑩,肖峰.電炮原理[M]. 北京:國防工業出版社,1994:5-60. WANG Ying, XIAO Feng. Principle of Electric Gun [M]. Beijing: National Defense Industry Press, 1994:5-60.
[7] 劉戰偉,陳喜民,董杰,等. 小型霍普金森桿多級電磁發射系統的優化[J]. 實驗力學,2015(1):9-16. LIU Zhanwei, CHEN Ximin, DONG Jie, et al. The optimization of multistage electromagnetic launching system of mini-SHB [J]. Journal of Experimental Mechanics, 2015(1):9-16.
[8] 段俊瑞. 片梭織機緯紗飛行速度分析 [J]. 西安工程大學學報,2013(6):711-718. DUAN Junrui. Analysis of weft yarn velocity on the projectile weaving machine [J]. Journal of Xi′an Polytechnic University, 2013(6):711-718.
[9] 張赫,寇寶泉,金銀錫,等. 圓筒型Halbach次級結構磁懸浮重力補償器[J]. 電工技術學報, 2016(6):30-37. ZHANG He, KOU Baoquan, JIN Yinxi, et al. A cylindrical magnetic levitation gravity compensator with Halbach secondary structure [J]. Transactions of China Electrotechnical Society, 2016(6):30-37.
[10] 辛朝軍,蔡遠文,任元,等. 磁懸浮敏感陀螺動力學建模與關鍵誤差源分析[J]. 北京航空航天大學學報,2016(10):2048-2058. XIN Chaojun,CAI Yuanwen,REN Yuan, et al. Dynamic modeling and key error sources analysis of magnetically suspended sensitive gyroscopes [J]. Journal of Beijing University of Aeronautics and Astronautics, 2016(10):2048-2058.
Establishmentofelectromagneticdrivingmagneticlevitationprojectileweftinsertionprinciples
WU Xiaoguang1, YUAN Bo1, LEI Xiaolong1, ZHANG Chi1, KONG Lingxue2
(1.SchoolofMechanicalEngineeringandAutomation,WuhanTextileUniversity,Wuhan,Hubei430073,China;2.KeyLaboratoryofInnovation,DeakinUniversity,Geelong3217,Australia)
For projectile Loom, torsion bar weft insertion mechanism, exists problems like large impact, low efficiency, high energy consumption, etc. A multi-stage electromagnetic picking principle was proposed. According to the theory of electromagnetic projection, the basic scheme of wefting insertion project/braking and the weft insertion models were established. By the theoretical model, experimental tests and simulation analysis, the conclusion that multistage electromagnetic casting efficiency is better than that of the torsion bar mechanism is obtained; for the projectile motion stability in high speed, the projectile magnetic suspension sley array system was proposed. The theoretical model of electromagnetic casting and magnetic suspension sley was established, and the velocity, acceleration and electromagnetic field coupling characteristics of projectile were analyzed. The feasibility of the electromagnetic drive was verified by the electromagnetic driving accelerated test and ANSYS finite element analysis, and ″zero transmission″ projectile wefting insertion mode was achieved.
electromagnetic driving projectile; weft insertion; magnetic suspension sley array; projectile loom
TS 131.9
:A
10.13475/j.fzxb.20160804907
2016-08-23
:2017-05-28
國家自然科學基金資助項目(51175384);湖北省自然科學基金項目、省數字化紡織裝備重點實驗室基金(武漢紡織大學)項目(2014CFA099/DTL2017003/ 002)
吳曉光(1954—),男,教授。主要研究方向為新型紡織裝備。E-mail:2006wist@163.com。
