復雜外形潛水器的動力學建模
2017-09-29 07:38:59許孟孟馮正平畢安元潘萬鈞
艦船科學技術 2017年9期
關鍵詞:模型
許孟孟,馮正平,畢安元,潘萬鈞
(上海交通大學 船舶海洋與建筑工程學院,上海 200240)
復雜外形潛水器的動力學建模
許孟孟,馮正平,畢安元,潘萬鈞
(上海交通大學 船舶海洋與建筑工程學院,上海 200240)
為建立復雜外形潛水器精確的動力學模型,并基于模型設計控制算法,本文以DOE HD2+2無人遙控潛水器(ROV)為對象,應用計算流體力學(CFD)粘流方法與面元法預測水動力系數。為提高計算速度,在保證計算精度的前提下,采用多面體網格,進行網格優化,減少了流體域的網格總數。由于ROV幾何外形不對稱,基于最小二乘法分段擬合了阻尼力/力矩與速度的曲線,建立了耦合的阻尼矩陣和附加質量矩陣。最后,基于CFD計算的水動力系數建立了Matlab Simulink動力學仿真模型,并通過水池操控實驗對所建動力學模型進行了有效性驗證。
復雜外形;潛水器;耦合;水池操控實驗
0 引 言
無人潛水器的應用越來越廣泛。大多數潛水器外形復雜,在較高速度下潛水器的動力學模型是高度非線性、耦合的[1]。為了提高潛水器控制系統的性能及魯棒性,基于模型設計非線性控制器,需要建立較精確的非線性模型。
潛水器在流體中運動,引起運動的水對其產生反作用力,即水動力。水動力的大小、方向及其分布,取決于潛水器本身的運動和幾何外形;只有少數像球體、回轉體等有解析解,一般都由模型試驗或經驗公式確定[2]。外形不規則、不對稱的潛水器,其水動力特性非常復雜。一個典型ROV的非線性數學模型有200多個水動力系數[3]。根據流體力學分析,復雜外形潛水器所受的壓差阻力更大,而且其外形曲率變化大,近壁面流體流動不能很好地貼合在其幾何表面,邊界層易發生分離,產生漩渦。因此,針對復雜形狀的潛水器,水動力系數很難預測。
目前,潛水器的水動力參數主要通過經驗公式法[4]、CFD法[5–8]、實驗法[9–11]測得。經驗公式法適用于細長體的潛水器,不能準確估算復雜外形潛水器的水動力。實驗法的測量結果最為準確,但實驗成本高。針對復雜外形的潛水器,文獻[5, 8]都沒有考慮耦合水動力的影響。本文以上海交通大學水下工程實驗室DOE HD2+2 ROV為計算對象,建立其幾何模型并劃分網格,應用STAR-CCM+與WAMIT等CFD軟件計算水動力,確定耦合的阻尼力/力矩參數和附加質量力/力矩參數,最終建立了較復雜的非線性數學模型。
工程應用中ROV的阻尼矩陣大多近似為對角矩陣[1],非對角元素很難通過實驗和理論計算獲得。為求解非對角阻尼矩陣,首先建立了復雜的ROV幾何模型。其次,應用粘性流理論通過CFD軟件計算阻尼水動力。為減少流體域網格的數量,并提高計算速度,采用多面體網格。這樣流體域網格數量大大減少,在保證計算精度的前提下,實現了計算速度2~3倍的提高。同時,進一步驗證網格的無關性[12-13],優化網格,確定較少的網格數量。為了檢驗動力學模型的精度,通過開環操控實驗觀測ROV的運動狀態,并與仿真結果對比,結果顯示較好的一致性。
1 阻尼矩陣計算
1.1 DOE HD2+2 ROV的幾何建模
DOE HD2+2 ROV重量為128 kg,長1.4 m,寬0.686 m,高0.673 m,最大作業深度為300 m。它有4個水平推進器,控制ROV的前進和回轉運動,1個側向推進器控制ROV的側向運動,1個垂向推進器控制ROV的升沉運動,其本體結構從上往下主要為防撞框架、浮力塊、推進器、配平鉛塊等。
多數ROV都是開架式的結構,通常有如下特點:2個對稱面(左右、上下對稱)、低的運動速度、緩慢解耦的運動。對于這種類型的ROV,六自由度運動方程可以簡化。Fossen[1]給出了ROV簡化的阻尼矩陣和附加質量矩陣,忽略了非對角元素。
然而針對DOE HD2+2 ROV,其外形復雜,上下、前后面都不對稱,如圖1所示,非對角阻尼元素不可以忽略。與文獻[5 – 6]不同,主要考慮對潛水器阻力影響最大的主殼體,對ROV的幾何部件作了一定簡化,省略了螺旋槳等部件。為提高CFD計算結果的準確性,首先,建立較完整的復雜的幾何模型。對阻力影響較大、裸露在水中的部件都包含在ROV幾何模型中,包括照明燈、攝像機、導管及螺旋槳等。ROV的幾何部件都是類似長方體等不規則形狀的鈍體,其迎流面法向方向與流體運動方向成較小夾角,余弦值較大,對流體的阻礙作用明顯。例如,直徑為D的圓柱體所受的阻力大約10倍相同厚度的流線體所受的阻力[14]。其次,建立了較為精確的1:1模型,在幾何外形、尺寸上與實際ROV保持一致。以浮力塊為例,浮力塊表面用曲面近似,邊界處通過圓弧倒角過渡,與實際ROV的浮力塊幾何特征保持一致。
潛水器完全浸沒在水中運動,定義ROV浮心為載體坐標系原點,Z軸向下。通過實驗測量ROV的重心,并估算其轉動慣量,可得剛體參數如下:
1.2 流體域建立
為了求解ROV在流體中作勻速運動所受的水動力,根據Galileo的運動相對性原理[15],先進行運動轉換,把物體當作靜止不動而讓流體流過物體,使原來的非定常問題改變成定常問題。ROV在水中運動可分為:平移運動和旋轉運動,分別建立了模擬ROV運動的流體域,如圖2所示。由于ROV外形近似為長方體,選取其平移運動的計算域為長方體。旋轉運動流體域為繞旋轉中心的旋臂區域[16]。
以模擬ROV回轉運動為例,令ROV縱蕩速度u=ωr,ω為角速度,r為ROV原點到旋轉中心的距離。回轉運動中,保持ROV線速度1 m/s不變,橫蕩速度為0 m/s,通過改變旋臂半徑的大小來改變角速度。因此,為了預測旋轉水動力導數,需要建立多個旋轉流體域。
1.3 網格劃分
求解任何流體流動問題,獲得流動中所有細節的網格至關重要。為了準確獲取ROV的復雜外形信息,例如螺旋槳、照明燈等,需要劃分相對較細的網格,這勢必會導致整個流體域網格數量的大大增加。為了生成高質量且較少數量的網格,針對復雜外形的ROV,采用多面體網格劃分流體域,并設置相應的網格參數,使近壁面網格尺寸較小,遠離壁面的流體域表面網格尺寸相對較大。這樣既保證第 1 層網格厚度滿足y+值的要求[3],又使網格自模型壁面向外由密到疏布置。流體域體網格分布與ROV壁面網格如圖3所示。
針對復雜形狀的幾何結構,通常采用四面體網格劃分,本文采用多面體網格。與四面體網格相比,生成多面體網格可以大大減少流體域的網格總數,如表1所示。這樣節省了計算資源,計算速度提高了2倍以上。
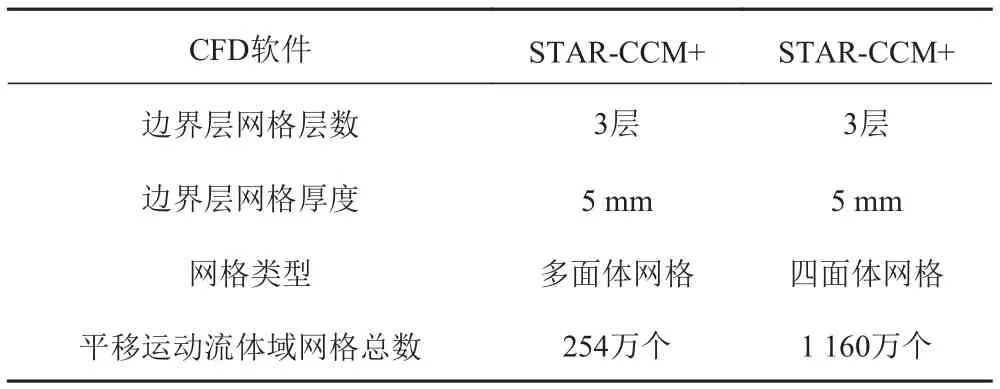
表 1 多面體與四面體網格參數設置Tab. 1 Parameters setting for polyhedral and tetrahedral mesh
網格劃分好后,選取可實現K-Epsilon兩層湍流模型。然后定義邊界條件,分別定義速度入口和壓力出口,用于設置不同大小的速度和湍流強度,其他邊界取為滑移壁面。
STAR-CCM+中ROV壁面的y+值基本在30~100之間,如圖4(a)ROV壁面Y+圖所示,第 1 層網格高度在湍流區域內。由圖4(b)右壓強云圖可以看出DOE HD2+2 ROV的迎流面壓強大,明顯阻礙水流的運動。由圖5速度云圖可知旋轉域內水流速度的大小與半徑成正比,與文獻[16]潛艇的速度云圖不同,流經ROV的尾流速度在很長的流域內都不能恢復到進流段的流態,這是因為潛艇為流線型,對流體阻礙作用小,而ROV外形復雜,對壁面附近水流速度阻礙顯著。
1.4 網格獨立性驗證
為檢驗計算結果的準確性,進行了網格的獨立性驗證。表2為不同網格數量的參數設置。在保持計算結果一致性的前提下,以ROV縱蕩和橫蕩運動為例,確定最少網格數量。
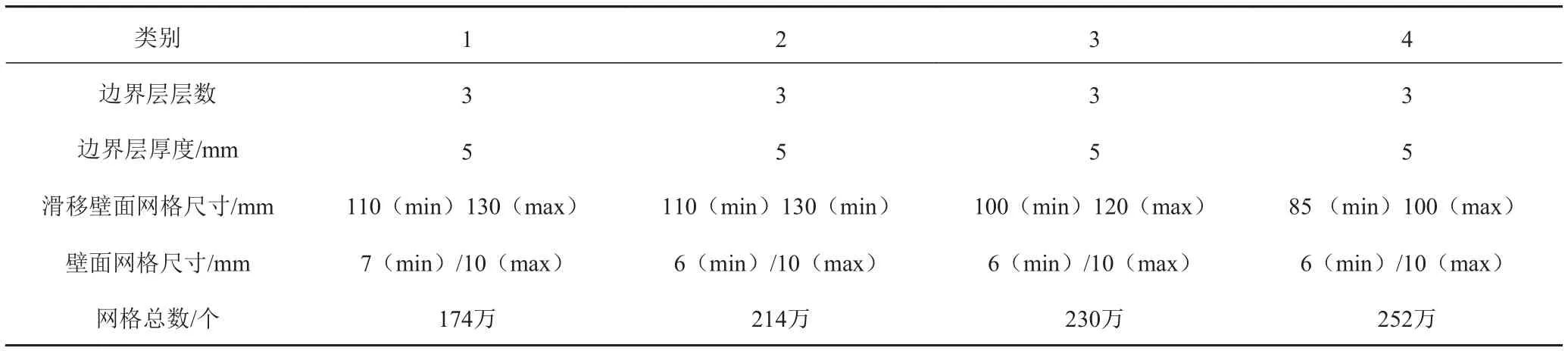
表 2 流體域網格參數和數量對比Tab. 2 Comparison of mesh settings
由圖6和圖7可知,第3和第4類網格下ROV縱向運動和側向運動的計算結果幾乎一致。最終選取較少網格數量的第3類網格參數。
1.5 耦合的阻尼矩陣
通過STAR-CCM+軟件模擬ROV的平移運動和旋轉運動,計算得到了90多組水動力和力矩。基于最小二乘法將數據進行曲線擬合,得到線性和非線性的水動力系數。與潛艇[4]相似,由于ROV外形前后、上下不對稱,其ROV運動方向改變,所引起的水動力/力矩也不同。
非線性阻尼矩陣D(V)如下:
2 附加質量矩陣計算
2.1 面元法
附加質量可通過動網格法、面元法進行數值模擬。然而,針對復雜外形的物體,動網格法很難有效。近壁面的網格都是非結構的,采用動網格方法模擬ROV的非定常運動,運動更新后網格很容易產生負體積,而且計算時間長。應用勢流面元法,假設流體的運動為無旋的,已知邊界條件,先求解6個自由度的速度勢,再根據附加質量的定義求解各個模態的附加質量。
在慣性坐標系下,流體運動滿足的邊界條件如下:
附加質量定義如下:
其中:φ為物體對流體的總的擾動速度勢;φi為單一運動(平移或轉動)的速度勢;Vn為剛體在流體中運動的速度;ρ為流體的密度;S0為剛體表面積。
2.2 WAMIT計算
使用MultiSurf軟件將ROV的表面離散若干個網格單元,用網格去近似代替原來的物面,如圖8所示。由于ROV近似左右對稱,只建立了物面的一半面網格模型。另外,在平面處布置網格節點較少,曲面處布置較多網格。這樣在保持計算精度的前提下,減小網格節點的總量,加快計算速度。
2.3 耦合的附加質量矩陣
由于WAMIT所有的輸出結果都是相對于其水面坐標系的,而所求的附加質量是相對于ROV載體坐標系的,這對ROV附加質量矩陣中具有質量矩和慣性矩的大小有影響。因此,需要將輸出結果轉化為相對于其載體坐標系的。應用坐標系變換,最終得到12個有量綱的附加質量系數。
最終得到的耦合的附加質量矩陣如下所示:
3 實驗與仿真結果對比
基于CFD方法得到的水動力系數與剛體參數,本文利用Matlab Simulink建立ROV的動力學仿真模型。另外,在水下工程實驗室完成ROV開環操控實驗。
分別對比了ROV的縱蕩、橫蕩、垂蕩和回轉 4 個自由度ROV姿態角的變化,由圖9可得在縱向推力的作用下,ROV在前進運動時高度也發生變化。這主要是由于其幾何外形上下不對稱,由縱向速度u引起垂向水動力使ROV上升。由圖10可知ROV在側向推力下一直在偏轉運動,這是其推力作用點與ROV的浮心不在同一垂線上,產生了回轉力矩,使ROV偏轉。在回轉力矩作用下,對比了ROV的首向角變化,如圖11所示,仿真結果與實驗結果有一定的偏差,這主要由于旋轉水動力系數計算偏差以及耦合運動產生的水動力項沒有考慮。對比ROV在垂向推力下的高度變化,由圖12可知仿真結果與實驗結果非常接近。
ROV在高速運動下,其非線性模型是高度耦合的,涉及到更多非線性耦合項,難以預測。本文只是對比了ROV較低速下的運動響應,而且由于沒有速度傳感器和定位設備,只能通過ROV姿態變化驗證DOE HD2+2 ROV動力學模型的有效性。
4 結 語
本文以DOE HD2+2 ROV為計算對象,基于粘性流與勢流理論采用CFD法計算其水動力,并建立其動力學模型,得到如下結論:
1)具有不規則、不對稱外形的潛水器,正負方向運動所引起的水動力有差別,而且有耦合力產生。
2)通過開環操控實驗與仿真對比,可證明建立的ROV動力學模型及采用CFD方法計算復雜外形的潛水器水動力有效。在保證計算結果精度的前提下,基于多面體網格的數值計算及面元法都大大提高了計算效率,該方法同樣適用于其他潛水器的水動力計算。
本文是針對觀測型的ROV水動力計算,若是針對作業型的ROV,考慮到機械手以及ROV耦合運動引起的相關水動力系數,水動力特性更加復雜。未來工作是,若條件允許下,將會通過平面運動機構驗證部分水動力的計算結果,并進一步完善ROV動力學模型。
[ 1 ]FOSSEN T I. Guidance and control of ocean vehicles [M].1994.
[ 2 ]劉應中. 船舶原理. 下冊 [M]. 上海:上海交大出版社, 2005.
[ 3 ]YOERGER D R, NEWMAN J, SLOTINE J J E. Supervisory control system for the JASON ROV [J]. IEEE Journal of Oceanic Engineering, 1986, 11(3): 392–400.
[ 4 ]施生達. 潛艇操縱性 [M]. 國防工業出版社, 1995.
[ 5 ]YANG R, CLEMENT B, MANSOUR A, et al. Modeling of a complex-shaped underwater vehicle [J]. Journal of Intelligent& Robotic Systems, 2015, 80(3): 491–506.
[ 6 ]TYAGI A, SEN D. Calculation of transverse hydrodynamic coefficients using computational fluid dynamic approach [J].Ocean Engineering, 2006, 33(5–6): 798–809.
[ 7 ]TANG S, URA T, NAKATANI T, et al. Estimation of the hydrodynamic coefficients of the complex-shaped autonomous underwater vehicle TUNA-SAND [J]. Journal of Marine Science and Technology, 2009, 14(3): 373–86.
[ 8 ]CHENG C, LAU M. Modeling and testing of hydrodynamic damping Model for a complex-shaped remotely-operated vehicle for control [J]. Journal of Marine Science and Application, 2012, 11(2): 150–63.
[ 9 ]ENG Y H, LAU W S, LOW E, et al. Estimation of the hydrodynamics coefficients of an ROV using free decay pendulum motion [J]. Engineering Letters, 2008, 16(3):329–42.
[10]AVILA J P, ADAMOWSKI J C, MARUYAMA N, et al.Modeling and identification of an open-frame underwater vehicle: the yaw motion dynamics [J]. Journal of Intelligent &Robotic Systems, 2012, 66(1): 37–56.
[11]AVILA J J, NISHIMOTO K, SAMPAIO C M, et al.Experimental investigation of the hydrodynamic coefficients of a remotely operated vehicle using a planar motion mechanism[J]. Journal of Offshore Mechanics & Arctic Engineering,2012, 134(2): 46–51.
[12]KIM H, LEONG Z Q, RANMUTHUGALA D, et al. CFD modelling and validation of an AUV undergoing variable accelerations, F, 2014 [C].
[13]EBRAHIMI F, RASTGOO A. Evaluation of linear and nonlinear hydrodynamic coefficients of underwater vehicles using CFD[C]//proceedings of the ASME 2009 International Conference on Ocean, Offshore and Arctic Engineering, F,2009 [C].
[14]MUNSON B R, YOUNG D F, OKIISHI T H. Fundamentals of fluid mechanics [M]. Wiley, 1990.
[15]劉岳元, 馮鐵城, 劉應中. 水動力學基礎 [M]. 上海交通大學出版社, 1990.
[16]SHADLAGHANI A, MANSOORZADEH S. Calculation of linear damping coefficients by numerical simulation of steady state experiments [J]. 2016, 9(2): 653–60.
[17]NEWMAN J N, LANDWEBER L. Marine hydrodynamics [J].Journal of Applied Mechanics, 1977, 45(2): 457.
Dynamic modeling of complex-shaped underwater vehicle
XU Meng-meng, FENG Zheng-ping, BI An-yuan, PAN Wan-jun
(School of Naval Architecture, Ocean and Civil Engineering, Shanghai Jiaotong University, Shanghai 200240, China)
As a complex-shaped underwater vehicle, DOE HD2+2 remotely operated vehicle (ROV) is chosen as an object to compute hydrodynamic parameters. It is necessary for nonlinear modeling of complex-shaped underwater vehicle and model-based control system design. Damping coefficients and added mass coefficients are determined by computational fluid dynamics (CFD) viscous flow method and panel method. Instead of tetrahedral mesh, polyhedral mesh is adopted to improve the computational time. And mesh is optimized to reduce the total number of grids in the flow domain. Due to the asymmetry of geometry shape of ROV, the curves of damping force and moment versus velocity are piecewise fitted. Finally, the dynamic simulation model of ROV is established by Matlab Simulink based on hydrodynamic coefficients determined by CFD, and the validity of dynamic model is validated by pool experiment.
complex-shaped;underwater vehicle;coupling;pool experiment
U661.3
A
1672 – 7649(2017)09 – 0023 – 06
10.3404/j.issn.1672 – 7649.2017.09.005
2016 – 12 – 26;
2017 – 01 – 09
許孟孟(1989 – ),男,碩士研究生,研究方向為水下運載器動力學建模與控制。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19