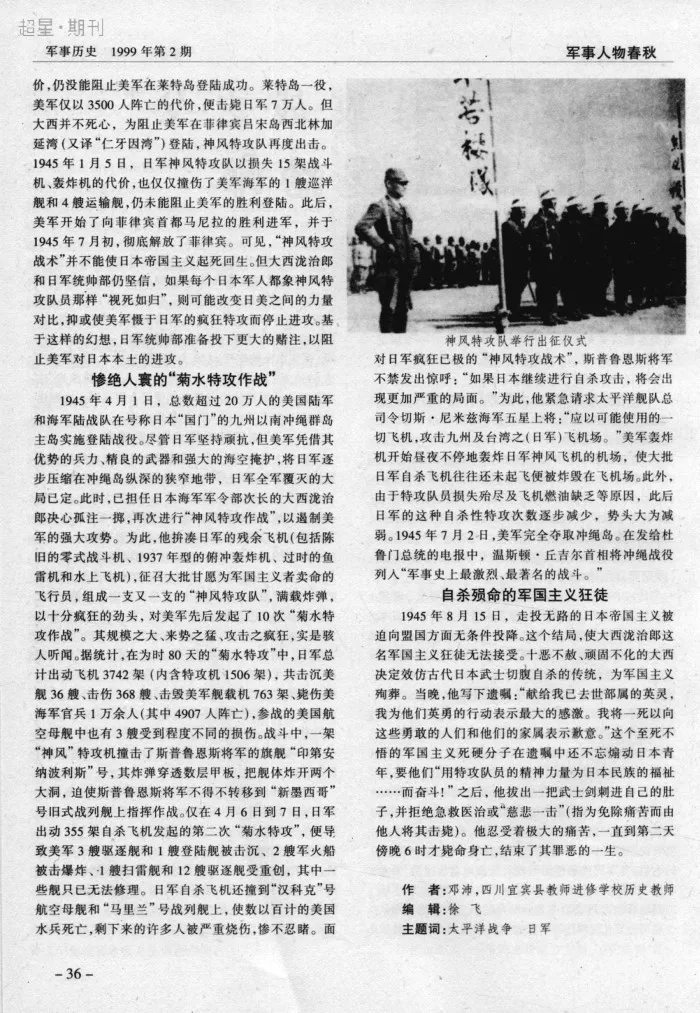
軍事歷史1999年2期
1《師道·教研》2024年10期
2《思維與智慧·上半月》2024年11期
3《現代工業經濟和信息化》2024年2期
4《微型小說月報》2024年10期
5《工業微生物》2024年1期
6《雪蓮》2024年9期
7《世界博覽》2024年21期
8《中小企業管理與科技》2024年6期
9《現代食品》2024年4期
10《衛生職業教育》2024年10期
關于參考網