一種基于天線布局的姿態測量算法研究
2017-10-13 22:15:11崔建華程乃平
電子與信息學報 2017年2期
崔建華 程乃平
?
一種基于天線布局的姿態測量算法研究
崔建華*①②程乃平①
①(裝備學院 北京 101416)②(中國人民解放軍66407部隊 北京 100144)
該文針對姿態測量過程中求解整周模糊度計算復雜度高的問題,提出一種基于天線布局的姿態測量方法。該方法在一定的測量誤差下,采用特定的方式配置姿態測量天線組,通過天線配置的約束信息確定載波相位的整周模糊度差,并使用短基線和中基線分別進行姿態粗測和精測,達到快速姿態測量和提高精度的目的。使用這種方法進行飛行器姿態測量時可以不必求解整周模糊度,避免了復雜的整周模糊度搜索算法,進而提高了姿態測量速度,該方法非常適用于飛行器的快速測姿。
導航;姿態測量;整周模糊度
1 引言
GPS衛星的發射信號采用直接序列擴頻(DSSS)的調制方式,可以在低信噪比的條件下提供導航服務,導航信號中包含了基本導航數據(如衛星星歷及衛星健康狀況等)和測距信號,其中的測距信號擴頻碼分為短的粗捕(C/A)碼和長的精密(P)碼,C/A碼的周期為1 ms, P碼是周期長7天的加密序列。通過兩種擴頻碼實現不同精度定位測量。
在進行導航定位的過程中,衛星到用戶的偽距是接收機實現單點絕對定位的必要條件,偽距是測距碼信號的傳播速度乘以測距碼從衛星傳送到用戶接收機天線時所需時間計算出的傳播距離。除了偽距之外,接收機從衛星信號中獲得的另一個基本測量值是載波相位,它在高精度定位中起著關鍵作用。在實際應用中,偽距測量和載波相位測量都有很多應用之處。目前接收機偽碼測量精度大約為一個碼元寬度的千分之一,即:C/A碼約為0.3 m,P碼約為0.03 m[1]。而載波相位測量由于載波頻率高,波長短,所以其測量精度一般可以達到1~2 mm,廣泛用于高精度測量定位中。
衛星發射信號的載波是周期性的正弦波,但是在接收機的相位測量只能測得導航信號中不足一周的載波相位小數部分,因此其測量值存在著未知的載波相位整周模糊度[2]。一般在連續跟蹤衛星無周跳的情況下,接收機在進行首次測量之后,可以連續測得整周相位變化的衛星載波信號。同時,因為載波相位觀測方程最終要完成接收機位置的估算,而參數估計一般使用最小二乘法,所以需要將載波相位觀測模型線性化。
在導航衛星姿態測量中,如果將3到5個導航衛星信號接收天線采用天線配置技術安裝在飛行器表面,在天線之間基線長度固定的情況下,保證3個以上的天線對天空可視,然后利用各天線接收衛星信號的載波相位觀測值,求解在當地水平坐標系下天線間的基線向量,進而確定航天器的姿態角參數。
在實際應用中,每個接收天線在天線平臺坐標中的精確位置坐標可以通過事先測量得到,進而可以通過姿態變換矩陣建立基于最小二乘姿態參數的估計模型,從而估算得到最優的姿態角參數[3]。
通過載波相位測量姿態信息具有很高的精度,但其缺點是需要進行整周模糊度的解算,由于解算整周模糊度需要較大的計算量,因此降低了實時性。目前基于載波相位的姿態測量方法大多采用雙差法,先求解整周模糊度,然后根據載波相位值進行載體的姿態測量。而在求解整周模糊度時,使用最多的是基于目標函數直接構造搜索空間的LAMBDA方法[4],但這種方法也需要較長的搜索時間。
本文提出了一種基于姿態測量天線配置的新型姿態測量算法,在取得載波相位測量精度的經驗值之后,根據天線配置可以直接進行載體的姿態測量,而無需進行整周模糊度的求解。
2 無模糊天線配置模型
無模糊姿態測量方法通天線陣列進行導航信號的接收[5,6],如圖1所示,無模糊姿態測量天線陣列為5單元天線陣列,由一個參考陣元A1和兩個短基線天線A4, A5以及兩個中基線天線A2, A3構成[7]。并按照圖中所示配置姿態測量天線陣,其中的短基線姿態測量天線陣(A1A4和A1A5)和中基線姿態測量天線陣(A1A2和A1A3)可以進行不同精度的姿態測量,短基線陣元距參考陣元間距為1,中基線陣元距參考陣元間距為2。短基線天線與中基線天線是共線的。假設入射導航信號與其中一條基線的夾角是。
如果以接收GPS的L1(1575.42 MHz)載波為例,在使用短基線姿態測量天線的情況下,圖1中,設計短基線姿態測量天線A4, A5與參考陣元A1的距離1小于等于GPS的L1載波波長的一半,即基線,取1=90 mm。由于A1A4和A1A5各天線間的最大距離小于GPS L1波長,因此,在進行載波相位測量時,對于導航信號的載波相位測量值均在一個整周內,對于參考陣元和短基線姿態測量天線測得的載波相位之間沒有整周模糊度。因此可以通過單元天線對入射信號的相位差值求得入射信號的角度,如果每路射頻通道載波相位的測量誤差最大為,則每路天線基線的入射信號角度測量誤差最大為=4/90=0.045 rad。對于姿態測量而言,其姿態測量的角度誤差值誤差應小于0.045 rad。

圖1 無模糊姿態測量天線模型
在此基礎上,可以通過中長基線天線陣列進一步提高姿態測量精度,由于通過無模糊短基線天線陣列可初步確定天線陣列的姿態,并且能夠將姿態測量誤差確定在0.045 rad內,為了進一步提高姿態測量精度,令5單元天線陣列中兩短基線單元天線與中基線單元天線共線,構成中基線測量陣。其結構如圖1所示,并通過中基線測量陣進一步提高姿態測量精度。


在這種情況下,如果讓最大誤差值小于半個載波波長,則載波相位的差值就不存在整周模糊度,所以,使得值無模糊的2最大值條件為
(3)

在此條件下,對2間兩天線接收的信號進行載波相位測量計算,重新計算信號入射角,則的最大誤差可以降低為4 mm/2114 mm=1.9 mrad。如果不考慮計算誤差,此時平臺的姿態測量精度可達到1.9 mrad。
同理,根據等比計算法則。如果在中基線外再布設長基線測量天線,那么測量精度就能夠進一步提高,由于此時精度為1.9 mrad,值無模糊的3最大值條件為
此時的姿態測量精度是4 mm/49979 mm= 0.08 mrad。在整個測量過程中,基線內載波相位差的載波整周模糊度已消除,因此,能夠實現快速姿態測量。
我們在理論上分析了實現無模糊姿態測量需要的天線配置方式及精度,在實際應用過程中,測量的精度不僅與載波相位測量誤差有關,而且與衛星的幾何分布有關,不同的衛星幾何分布對定位精度有不同的影響,如果在當前衛星幾何分布情況下的精度因子DOP(Dilution Of Precision)為,載波相位的最大測量誤差為,那么,值無模糊的短基線1最大值條件為:。基于短基線天線的最大測量誤差為:;值無模糊的中基線2最大值條件為:,基于中基線天線的最大測量誤差為:;值無模糊的長基線3最大值條件為:,基于短基線天線的最大測量誤差為:。
國內某兩種型號飛行器的姿態測量指標需求如表1所示。

表1 某型號飛行器姿態測量指標
由以上推算可以得出,在兩米基線的情況下,無模糊姿態測量算法的測量精度能夠達到小于等于(),能夠滿足姿態測量的精度需求,另外,無模糊的姿態測量算法還可以應用于大型無人機等飛行器,在小型無人機上應用,因為基線長度要求的限制,其測姿精度將下降至0.045 rad。
3 雙差法進行載體姿態測量
在進行姿態測量時,對各陣元天線的信號線等長,并采用統一的時鐘通過ADC進行導航信號的采集,并且到各個ADC的時鐘線等長,這樣可以將信號線誤差降到最小,同時對于不同陣元的天線而言,其接收機的鐘差是一致的。采用的接收機前端結構如圖2所示。
圖2 姿態測量接收機前端
接收機接收測量到的GPS載波相位信號包含多種誤差,這些誤差既包括由于接收機自身因素形成的誤差,也包括信號傳輸過程中形成的誤差[8],對于接收機接收到的載波相位而言,接收機測量到的都是載波相位的小數位,其測量值[9]為
如圖3所示如果對編號為A1, A2的兩個測量天線對編號為,的兩顆導航衛星進行觀測,那么對同一衛星的兩個天線的載波信號測量值的差值稱為單差,對不同衛星的兩個單差載波信號測量值的差值稱為雙差。
那么,對于衛星單差的結果是:
圖3 載波相位測姿模型

由于兩個測姿天線的距離較近,與天線與衛星的距離相比,其距離非常小,因此,對于兩個接收天線而言,針對同一衛星的軌道誤差,對流層誤差和電離層誤差可以認為是相等的[10],即=,,,而且對于同一衛星的時鐘誤差是一致的,即,所以,式(7)化簡為
(8)
對于衛星,進行雙差的結果是:

對于不同的導航衛星而言,同一個接收機的接收機時鐘誤差和接收機信號線誤差是一致的,也就是說:,,可以將式(8)簡化為
(10)
結合上述的天線構成方式,不考慮多徑誤差和測量誤差的情況,分別對短基線情況和中基線情況予以討論。

(12)

(14)

(16)

如果觀測到的衛星一共有顆,用每個觀測到的衛星與第1顆衛星的觀測值進行雙差計算,針對于基線A1A2,可以組成-1個方程組成的觀測方程組:
(18)
針對于基線A1A3,對于顆可視衛星,可以組成-1個方程組成的觀測方程組:

我們按照圖4所示建立載體坐標系,以基線A1A2方向作為軸,垂直基線A1A2且與A1A2A3共面的方向為軸,A1為原點,垂直A1的方向為軸。A2A1A3的夾角為(本文中取)。根據前面的分析A1A2= A1A3=2。所以,3個天線的載體坐標系坐標為,,。
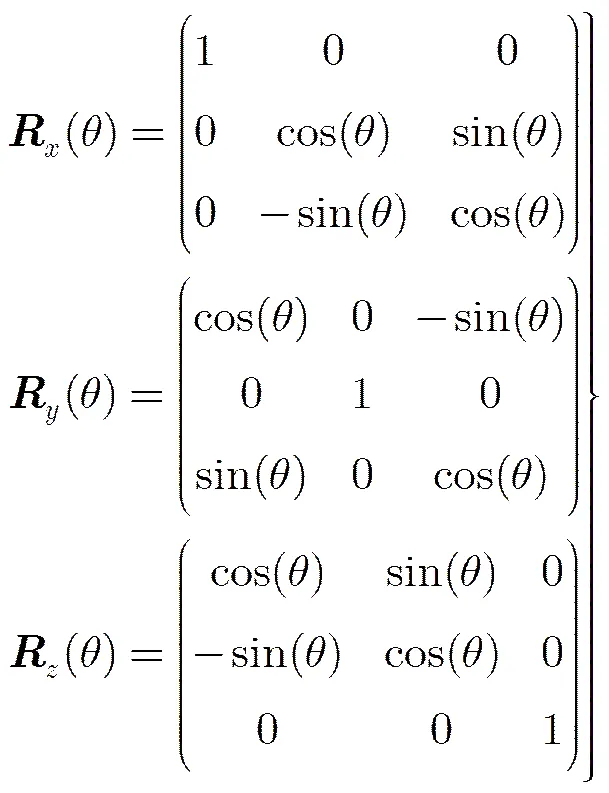
在地理坐標系下,根據坐標旋轉公式,如果載體的姿態角分別為航向角,橫滾角,俯仰角,那么載體坐標和地理坐標的轉換關系為

根據載體坐標和地理坐標的轉換關系,根據天線A1A2的坐標可以求出航向角和俯仰角:
(22)
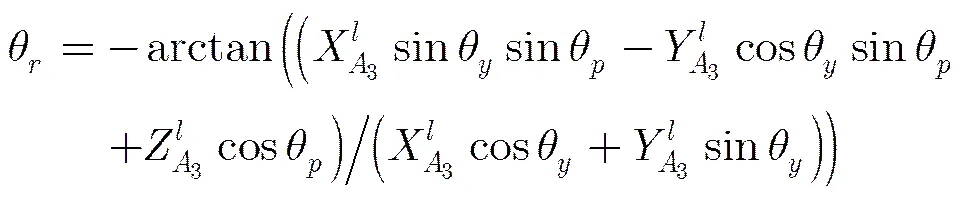
再根據天線A3的坐標和求得的航向角與俯仰角,可以求出橫滾角:
4 仿真結果
8顆衛星的分布如圖5所示。在8顆星的情況下,精度較高,此時精度因子為HDOP=1.4,VDOP=1.9。此時的角測量精度應該為:,仿真結果如圖6所示。由圖6可以看出,這種方法可以達到分析的精度,具有很高的應用價值。

表2 多星情況下可視星列表

圖5 8顆星情況下的可視星座圖

圖6 8星姿態解算仿真結果
在可視星為4顆的情況下,可視星如表3所示。4顆衛星的分布如圖7所示。
在4顆星的情況下,精度因子有所降低,此時精度因子為HDOP=2.0,VDOP=3.5。此時的角測量精度應為:仿真結果如圖8所示。

表3 4星情況下可視星列表
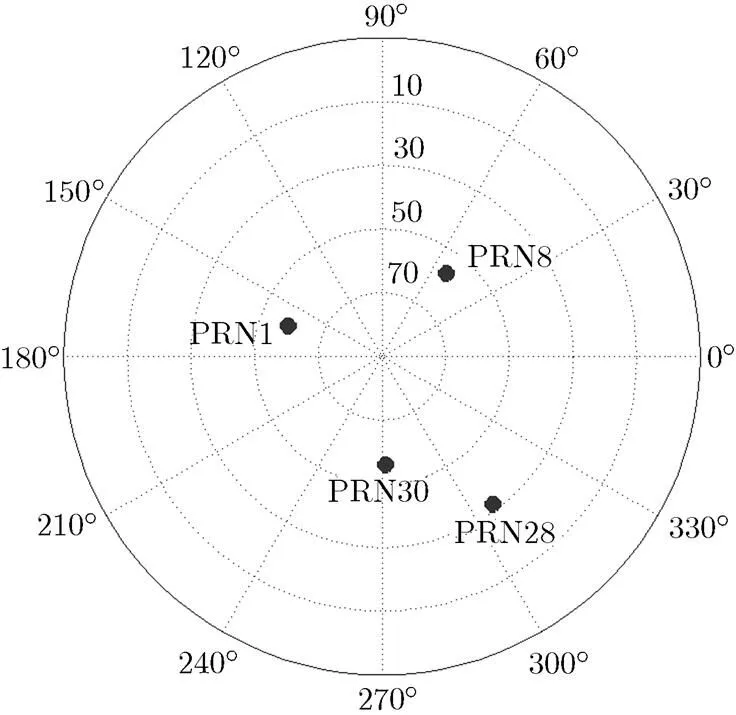
圖7 4顆星情況下的可視星座圖
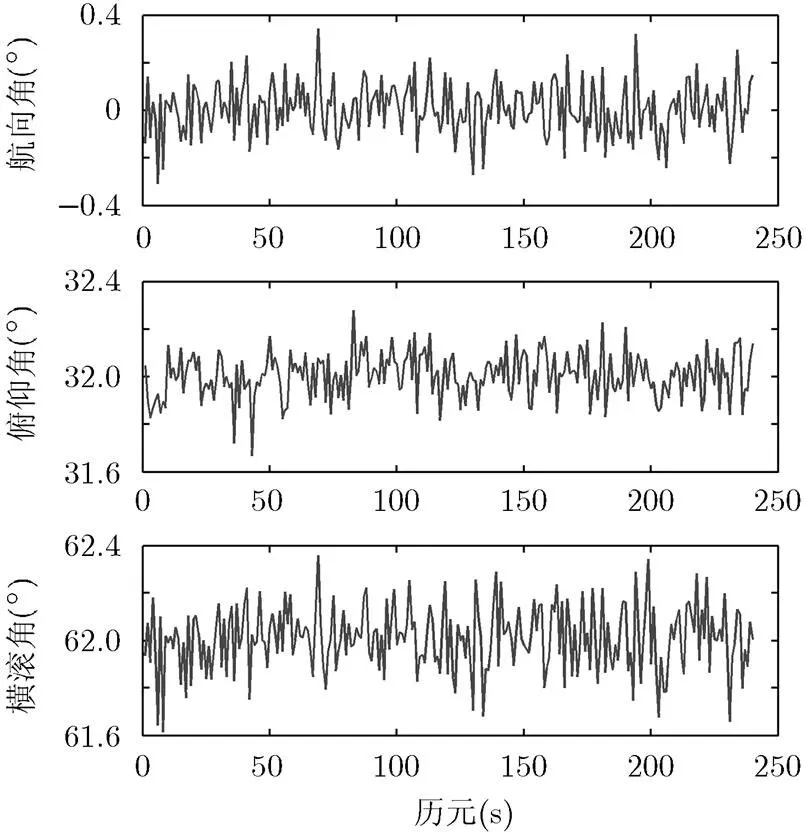
圖8 4星姿態解算仿真結果
5 結論
本文提出了一種基于天線位置約束的姿態測量方法,通過對天線位置的約束分析,得出了實現無模糊姿態測量的短基線和中基線模型,并依據此模型建立了雙差方程,給出了基于無模糊姿態測量天線的雙差姿態解算方法,并給出了仿真結果。
采用本文方法進行載體姿態測量,可以在保證姿態測量精度的前提下縮短姿態測量時間,能夠提高飛行器姿態測量的實時性。并且由于無模糊天線的特性保證了在姿態測量時整周模糊度的確定,使得這種方法適用于在高動態飛行器上,只要能夠保證載波的正常跟蹤,就可以實時進行姿態的測量。
[1] 許江寧, 朱濤, 卞鴻巍. GPS姿態測量技術綜述[J]. 海軍工程大學學報, 2003, 15(3): 17-22. doi: 10.3969/J.ISSN.1009-3486. 2003.03.005.
XU Jiangning, ZHU Tao, and BIAN Hongwei. Review on GPS attitude determination[J]., 2003, 15(3): 17-22. doi: 10.3969/J.ISSN. 1009-3486.2003.03.005.
[2] 徐定杰, 黨超, 沈鋒. 一種解算整周模糊度幾何算法實現GPS快速測姿[J]. 宇航學報, 2011, 32(12): 2518-2525. doi: 10. 3873/J.ISSN.1000-1328.2011.12.008。
XU Dingjie, DANG Chao, and SHEN Feng. A geometric method for integer ambiguity solution in GPS attitude determination[J]., 2011, 32(12): 2518-2525. doi: 10.3873/J.ISSN.1000-1328.2011.12.008.
[3] CHIANG K, PSIAKI M, and POWELL S. GPS-based attitude determination for a spinning rocket[J]., 2014, 50(4): 2654-2663.doi: 10.1109/TAES.2014.120822.
[4] OLIAZADEH N, LANDRY R, and YESTE-OJEDA O A. GPS-based attitude determination using RLS and LAMBDA methods[C]. IEEE 2015 International Conference onLocalization and GNSS (ICL-GNSS). Gothenburg, Sweden, 2015: 1-7.doi: 10.1109/ICL-GNSS.2015.7217146.
[5] KIS L and LANTOS B. Aided carrier phase differential GPS for attitude determination[C]. 2011 IEEE ASME International Conference on Advanced Intelligent Mechatronics (AIM). Budapest, Hungary, 2011: 778-783.doi: 10.1109/AIM.2011.6027009.
[6] NADARAJAH N, TEUNISSEN P J G, and RAZIQ N. Instantaneous GPS-Galileo attitude determination: single- frequency performance in satellite-deprived environments[J]., 2013, 62(7): 2963-2976.doi: 10.1109/TVT.2013.2256153.
[7] 田增山, 胡小川, 劉麗川。GPS姿態測量系統基線長度和天線布局設計[J]. 電波科學學報, 2001, 16(3): 379-383.doi: 10. 3969/J.ISSN.1005-0388.2001.03.021。
TIAN Zengshan, HU Xiaochuan, and LIU Lichuan. The design of baseline length and antenna configuration for GPS attitude determination system[J]., 2001, 16(3): 379-383.doi: 10.3969/J.ISSN.1005- 0388.2001.03.021.
[8] ARDALAN A A and REZVANI M H. An iterative method for attitude determination based on misaligned GNSS baselines[J].and, 2015, 51(1): 97-107.doi: 10.1109/TAES.2014. 130070.
[9] TATIYAWORANUN C and PURIVIGRAIPONG S. An operational algorithm for satellite attitude determination from GPS carrier phase[C]. IEEE 2012 9th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), Hua Hin, Thailand, 2012: 1-4.doi: 10.1109/ ECTICon.2012.6254194.
[10] KOZLOV A, GOLOVAN A, NIKULIN A,. GPS attitude determination under antenna array geometry deformation[C]. 7th International Conference on Recent Advances in Space Technologies. Istanbul, Turkey, 2015: 713-717.doi: 10.1109/ RAST.2015.7208434.
[11] SCATAGLINI T, PAGOLA F, COGO J,. Attitude estimation using GPS varrier phase single differences[J]., 2014, 12(12): 847-852.doi: 10.1109/TLA.2014.6872894.
[12] COIAS J, SANGUINO J, and OLIVEIRA P. Attitude determination using the ambiguity filter with single-frequency L1 GPS receivers[C]. 2012 International Conference on Localization and GNSS (ICL-GNSS). Starnberg, Germany 2012:1-6.doi: 10.1109/ICL-GNSS. 2012.6253133.
[13] 劉根友, 歐吉坤. GPS單歷元定向和測姿算法及其精度分析[J]. 武漢大學學報:信息科學版, 2003, 28(6): 732-735.doi: 10.3321/J.ISSN:1671-8860.2003.06.024
LIU Genyou and OU Jikun. Determining attitude with single epoch GPS algorithm and its precision analysis[J].&, 2003, 28(6): 732-735. doi: 10.3321/J.ISSN:1671- 8860.2003.06.024
[14] 楊鐵軍, 張曉玲, 付毓生, 等. 基于DSP的GPS雙天線實時姿態測量系統實現[J]. 電波科學學報, 2002, 17(6): 661-665. doi: 10.3969/J.ISSN.1005-0388.2002.06.024.。
YANG Tiejun, ZHANG Xiaoling, FU Yusheng,. Implementation of GPS twin antennas real-time attitude determination system based on DSP[J]., 2002, 17(6): 661-665.doi: 10.3969/J.ISSN. 1005-0388.2002.06.024.
[15] HENKEL P and IAFRANCESCO M. Tightly coupled position and attitude determination with two low-cost GNSS receivers[C]. 2014 IEEE 11th International Symposium on Wireless Communications Systems (ISWCS), Barcelona, Spain, 2014: 895-900. doi: 10.1109/ISWCS.2014.6933480.
[16] 茅文深, 常傳文. 基于導航衛星的載體姿態測量[M]. 北京:國防工業出版社, 2015: 26-35.
MAO Wenshen and CHANG Chuanwen. Carrier Attitude Measurement Based on Navigation Satellite[M]. Beijing: National Defense Industry Press, 2015: 26-35.
Attitude Determination Algorithm Based on Antenna Configuration
CUI Jianhua①②CHENG Naiping①
①(,101416)②(66407,100144,)
In order to solve the problem of high computational complexity of the ambiguity in attitude measurement, a new attitude measurement method based on antenna configuration is proposed. In a certain range of measurement error, the antenna array for attitude determination is properly configured, the integer ambiguity of double difference carrier phase is determined by the constraint information of antenna configuration. Short-baseline and middle-baseline are used for coarse and precise attitude measurement. This method for aerocraft attitude determination does not need to solve the ambiguity. It avoids the use of complex ambiguity search algorithm and improves the speed of attitude determination, it is suitable for fast attitude measurement of aerocraft.
Navigation; Attitude determination; Integer ambiguity
TN967.1
A
1009-5896(2017)02-0459-07
10.11999/JEIT160347
2016-04-11;改回日期:2016-08-30;
2016-10-17
崔建華 cjh_xilinx@163.com
崔建華: 男,1982年生,博士,研究方向為通信與信息系統.
程乃平: 男,1962年生,教授,博士生導師,研究方向為通信與信息系統.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
