三相異步電機(jī)機(jī)械特性的串聯(lián)電容校正策略
2017-10-14 03:43:24張德孝
船電技術(shù) 2017年5期
關(guān)鍵詞:機(jī)械
張德孝
三相異步電機(jī)機(jī)械特性的串聯(lián)電容校正策略
張德孝
(渤海船舶職業(yè)學(xué)院,遼寧興城 125105)
三相異步電動(dòng)機(jī)因其機(jī)械特性為多值函數(shù)這一缺陷,限制了其在波動(dòng)負(fù)載及大負(fù)載起動(dòng)工作場(chǎng)合的應(yīng)用。本文采用在轉(zhuǎn)子回路串接電容的校正策略,能夠?qū)θ喈惒诫妱?dòng)機(jī)機(jī)械特性的多值函數(shù)缺陷段進(jìn)行完全校正,從而使得三相異步電動(dòng)機(jī)的電力拖動(dòng)指標(biāo)得以顛覆式提升。
三相異步電動(dòng)機(jī) 機(jī)械特性 多值函數(shù) 起動(dòng)轉(zhuǎn)矩
0 引言
三相異步電動(dòng)機(jī)因結(jié)構(gòu)簡(jiǎn)單、運(yùn)行可靠、重量輕、價(jià)格便宜,得到了廣泛的應(yīng)用。但同時(shí)又具有致命的缺陷:由于三相異步電動(dòng)機(jī)的機(jī)械特性=()的起動(dòng)初始段為多值函數(shù),便會(huì)出現(xiàn)負(fù)載轉(zhuǎn)矩↑→轉(zhuǎn)速↓→電磁轉(zhuǎn)矩↓→轉(zhuǎn)速↓→直至電動(dòng)機(jī)堵轉(zhuǎn)而燒毀;起動(dòng)電流很大而起動(dòng)轉(zhuǎn)矩較小,難以帶負(fù)載起動(dòng)。
本文旨在通過對(duì)三相異步電動(dòng)機(jī)的主要電氣參數(shù)進(jìn)行顛覆性改變,從而對(duì)三相異步電動(dòng)機(jī)機(jī)械特性的缺陷進(jìn)行徹底校正,從而達(dá)到近乎理想的工作狀態(tài):1)起動(dòng)段具有接近恒轉(zhuǎn)矩較軟的機(jī)械特性,起動(dòng)轉(zhuǎn)矩巨大且適合于重載起動(dòng)。2)運(yùn)行段具有接近直流電動(dòng)機(jī)的機(jī)械特性。3)將機(jī)械特性校正成單值函數(shù),從而避免因負(fù)載波動(dòng)堵轉(zhuǎn)而燒毀繞組。
采用此校正策略和方案,將會(huì)使三相異步電動(dòng)機(jī)的電力拖動(dòng)能力得以巨大提升,應(yīng)用前景廣闊。
1 三相異步電動(dòng)機(jī)的機(jī)械特性與仿真
1.1 三相異步電動(dòng)機(jī)的電路模型與機(jī)械特性
三相異步電動(dòng)機(jī)的電路模型如圖1所示。
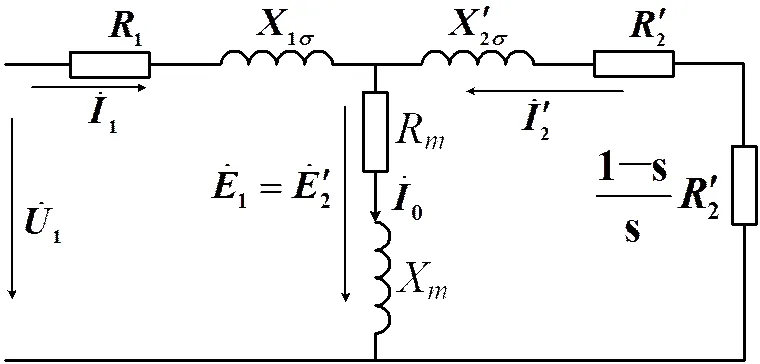
圖1 三相異步電動(dòng)機(jī)的電路模型
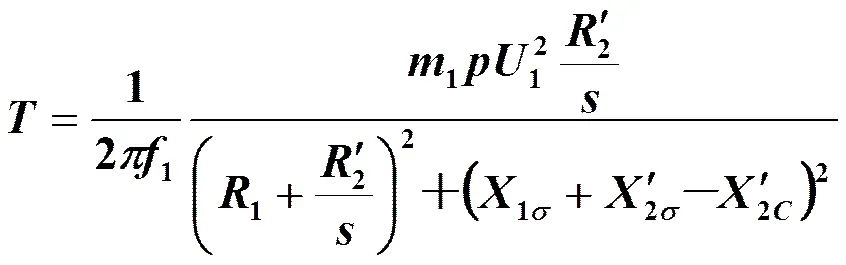
依圖1得出三相異步電動(dòng)機(jī)的機(jī)械特性為
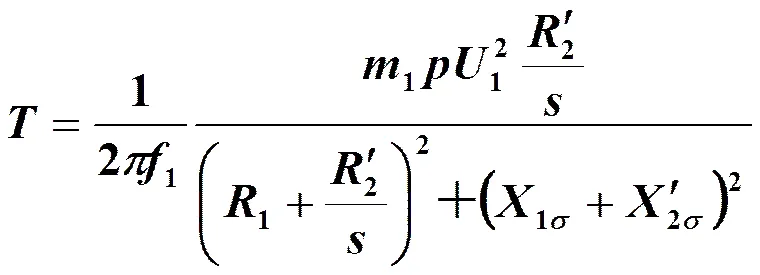
式中:1-定子相電壓;1-定子電壓頻率;1-定子電源相數(shù);-定子繞組磁極對(duì)數(shù);-轉(zhuǎn)差率;1-定子繞組相電阻;-定子繞組相漏感抗;-折算到定子側(cè)的轉(zhuǎn)子相電阻;-折算到定子側(cè)的轉(zhuǎn)子相漏感抗;-定子繞組相勵(lì)磁電流;m-定子繞組相勵(lì)磁電阻;m-定子繞組相勵(lì)磁感抗;N-轉(zhuǎn)子額定轉(zhuǎn)速。
1.2 三相異步電動(dòng)機(jī)機(jī)械特性的MATLAB仿真
將式1中的物理量替換為MATLAB編程語言符號(hào)格式:1-、1-、1-、-、-、-、N-,并設(shè)定物理量參數(shù)。用MATLAB進(jìn)行編程,應(yīng)用程序如下:
clc
clear
=380;=50;=1.375;=1.2;=2.43;=4.4;=2;=3;=1458;
=60*/;
=2**/;
for=0:;
=(-)/;
=(+/)^2+(+)^2;
=*^2*///;
plot(,,'-')
hold on
end
xlabel('轉(zhuǎn)矩[N,m]]');ylabel('轉(zhuǎn)速[r/min]');
title('機(jī)械特性')
grid on
axis([0 180 0 1600])
運(yùn)行應(yīng)用程序,得出三相異步電動(dòng)機(jī)機(jī)械特性的仿真曲線如圖2所示,且仿真曲線上的AB段即是其致命缺陷段,三相異步電動(dòng)機(jī)的諸多缺點(diǎn)均源于此。由圖2可以得出:起動(dòng)轉(zhuǎn)矩st1≈62 N·m,最大轉(zhuǎn)矩m1≈165 N·m。
2 校正后三相異步電動(dòng)機(jī)的機(jī)械特性與MATLAB仿真
2.1 校正后三相異步電機(jī)的電路模型與機(jī)械特性
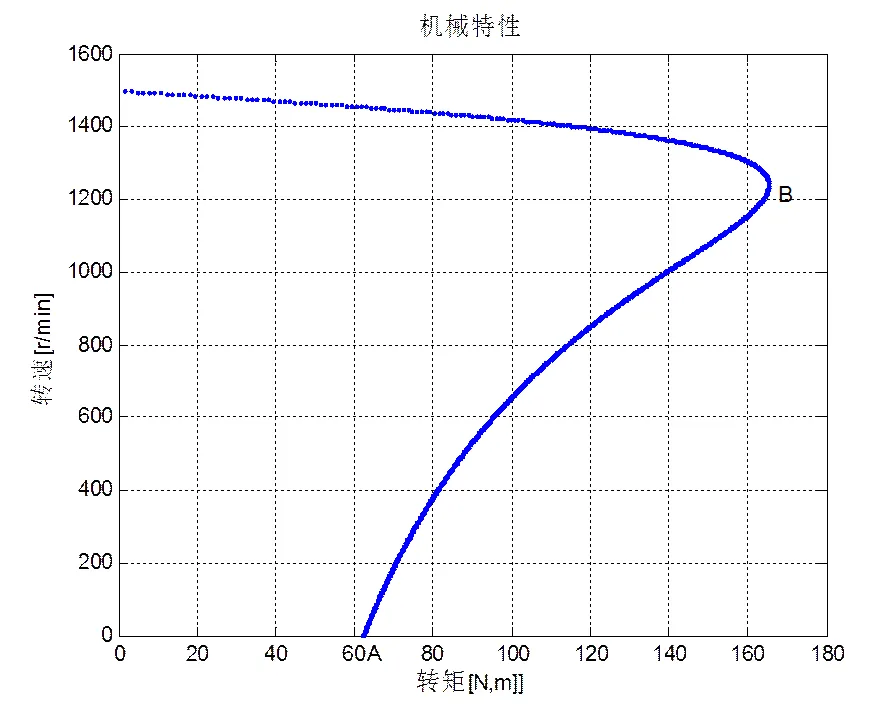
圖2 三相異步電動(dòng)機(jī)機(jī)械特性的仿真曲線
校正策略:在典型三相異步電動(dòng)機(jī)的轉(zhuǎn)子導(dǎo)條或轉(zhuǎn)子繞組中串聯(lián)電容。
校正后三相異步電動(dòng)機(jī)的電路模型如圖3所示。
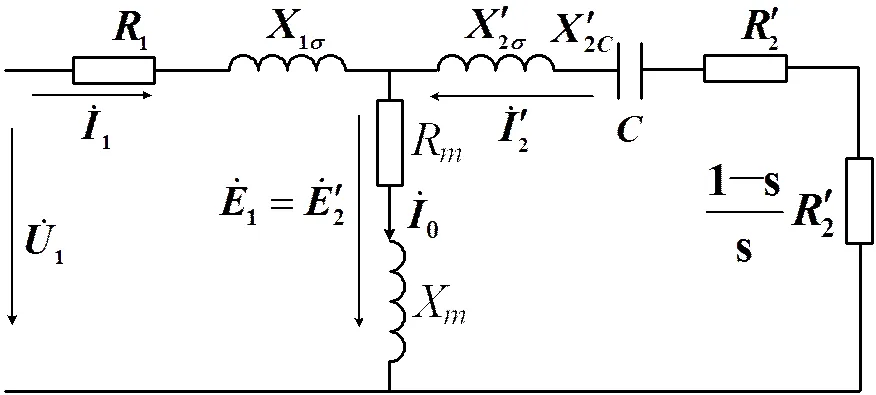
圖3 校正后三相異步電動(dòng)機(jī)的電路模型
依圖3得出校正后三相異步電動(dòng)機(jī)的機(jī)械特性為
2.2 校正后三相異步電動(dòng)機(jī)機(jī)械特性的MATLAB仿真
clc
clear
=380;=50;=1.375;=1.2;=2.43;=4.4;=2;=3;=1458;=0.00125;
=60*/; % 額定電壓=380 V;電源頻率=50 Hz;定子繞組電阻=1.375Ω;轉(zhuǎn)子繞組電阻=1.2Ω;定子繞組感抗=2.43Ω;轉(zhuǎn)子繞組感抗=4.4Ω;極對(duì)數(shù)=2;相數(shù)=3;轉(zhuǎn)子轉(zhuǎn)速=1458 r/min;定子繞組串聯(lián)電容=0.00125 F;同步轉(zhuǎn)速表達(dá)式=60*/
=2**/; % 角頻率設(shè)為
=70/2***; % 設(shè)容抗折算系數(shù)=電壓比*電流比=70
for=0:; % 轉(zhuǎn)速變化范圍
=(-)/; % 轉(zhuǎn)差率計(jì)算
=(+/)^2+(+x2-)^2; % 單相等效總阻抗簡(jiǎn)化計(jì)算
=*^2*///; % 電磁轉(zhuǎn)矩
plot(,,'-')
hold on
end
xlabel('轉(zhuǎn)矩[N,m]]');ylabel('轉(zhuǎn)速[r/min]');
title('機(jī)械特性')
grid on
axis([0 600 0 1600])
運(yùn)行應(yīng)用程序,得出校正后三相異步電動(dòng)機(jī)機(jī)械特性的仿真曲線如圖4所示,可以看出:普通三相異步電動(dòng)機(jī)機(jī)械特性的致命缺陷得以完全校正,使得三相異步電動(dòng)機(jī)的諸多缺點(diǎn)得以徹底克服。由圖4可以得出:st2=m2≈500 N·m,校正后的起動(dòng)轉(zhuǎn)矩近似為原來的8倍。在具體進(jìn)行仿真時(shí),電容的數(shù)值可以選不同的數(shù)值進(jìn)行校正試驗(yàn),直至機(jī)械特性校正到如圖4所示的最佳狀態(tài)為止。
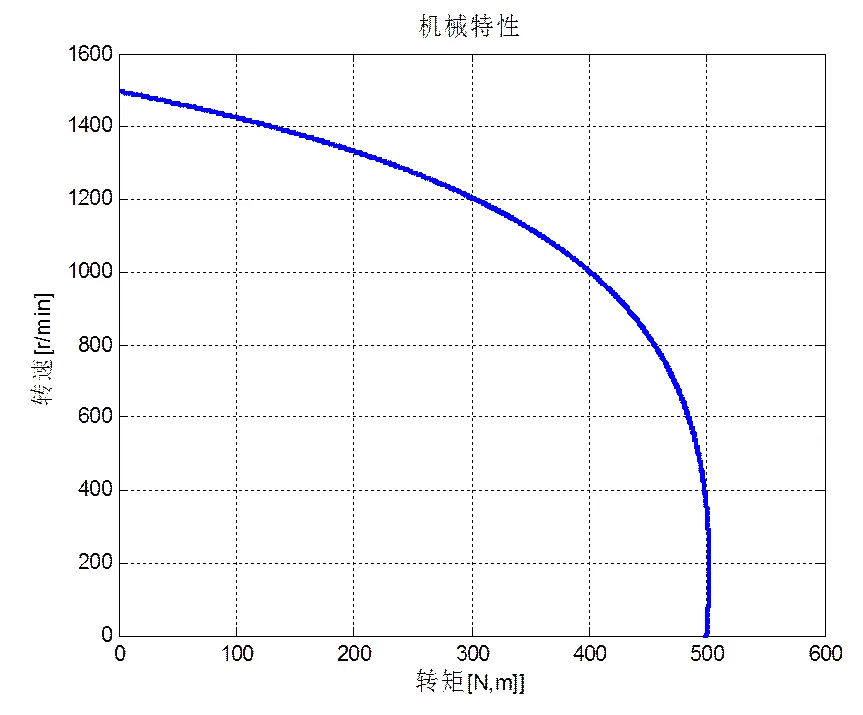
圖4 校正后三相異步電動(dòng)機(jī)機(jī)械特性的仿真曲線
3 結(jié)論
通過在三相異步電動(dòng)機(jī)的轉(zhuǎn)子繞組中串聯(lián)設(shè)定參數(shù)的電容,能夠?qū)θ喈惒诫妱?dòng)機(jī)機(jī)械特性的多值函數(shù)缺陷段進(jìn)行完全校正,機(jī)械特性趨于完美,校正后三相異步電動(dòng)機(jī)具有如下優(yōu)點(diǎn):
1)起動(dòng)轉(zhuǎn)矩巨大且適合于重載起動(dòng);2)起動(dòng)初始段具有恒轉(zhuǎn)矩的起動(dòng)特性;3)額定運(yùn)行段具有較硬的機(jī)械特性;4)能夠避免因負(fù)載波動(dòng)堵轉(zhuǎn)而燒毀電動(dòng)機(jī)繞組;5)會(huì)使三相異步電動(dòng)機(jī)的電力拖動(dòng)能力提以巨大提升,應(yīng)用前景廣闊,經(jīng)濟(jì)價(jià)值巨大。
[1] 黃群. 電容轉(zhuǎn)子異步電動(dòng)機(jī)[J]. 電氣時(shí)代, 2006, (3):84-87.
[2] 朱春鴦, 周政新. 三相異步電動(dòng)機(jī)調(diào)速機(jī)械特性仿真分析[J]. 上海第二工業(yè)大學(xué)學(xué)報(bào), 2012, (4):288-295.
[3] 洪乃剛. 電力電子、電機(jī)控制系統(tǒng)的建模和仿真[M].機(jī)械工業(yè)出版社, 2010:127-130.
[4] 范影樂. Matlab仿真應(yīng)用詳解(第2版)[M]. 人民郵電出版社, 2002.
Series Capacitor Correction Strategy of Mechanical Properties for Three-Phase Asynchronous Motor
Zhang Dexiao
(Bohai Shipbuilding Vocational College, Xingcheng 125105, Liaoning, China)
TP306
A
1003-4862(2017)05-0024-03
2016-10-15
張德孝(1964-),男,副教授。研究方向:電機(jī)工程。
猜你喜歡
機(jī)械工程材料(2022年10期)2022-11-21 12:08:44
小學(xué)科學(xué)(學(xué)生版)(2021年9期)2021-11-02 05:26:46
電腦報(bào)(2020年35期)2020-09-17 13:25:53
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
電腦報(bào)(2019年40期)2019-09-10 07:22:44
建材發(fā)展導(dǎo)向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機(jī)械與施工機(jī)械化(2017年6期)2017-07-10 11:54:50
科技知識(shí)動(dòng)漫(2016年8期)2016-07-29 20:40:09