雙變量變頻器有級(jí)調(diào)壓閉環(huán)調(diào)速策略研究
2017-10-23 07:54:14鞏銀苗魯西坤盧春華石峰徐帥
無線互聯(lián)科技 2017年19期
鞏銀苗++魯西坤++盧春華++石峰++徐帥

摘 要:文章針對(duì)傳統(tǒng)的交-交變頻器開環(huán)控制對(duì)轉(zhuǎn)速控制的精度不高、控制難度大的不足,在原有的僅采用控制觸發(fā)增量方法的基礎(chǔ)上加入了有級(jí)調(diào)壓閉環(huán)調(diào)速控制策略。通過在Matlab/Simulink中引入S函數(shù),建立了分段變頻有級(jí)調(diào)壓閉環(huán)調(diào)速系統(tǒng)的仿真模型,并以雙變量變頻器為基礎(chǔ)設(shè)計(jì)了實(shí)驗(yàn)電路,編寫了實(shí)驗(yàn)程序,從仿真和實(shí)驗(yàn)兩個(gè)方面對(duì)有機(jī)調(diào)壓閉環(huán)調(diào)速系統(tǒng)的性能進(jìn)行了分析。最后,得出雙變量交-交變頻器有機(jī)調(diào)壓閉環(huán)調(diào)速控制策略具有很高的控制精度,能夠提高系統(tǒng)的穩(wěn)定性的結(jié)論。
關(guān)鍵詞:雙變量控制;有級(jí)調(diào)壓;閉環(huán)調(diào)速
在現(xiàn)代工業(yè)控制中,繞線式電動(dòng)機(jī)尤其高壓繞線電機(jī)的應(yīng)用已經(jīng)十分普遍[1-4]。對(duì)高壓繞線電機(jī)進(jìn)行調(diào)控時(shí),若僅僅采用傳統(tǒng)變頻器的開環(huán)控制,就會(huì)使控制的難度增加,并且很難保證很高的控制精度[5-6],如果在原有的變頻器的基礎(chǔ)上加入閉環(huán)控制,就可以減小調(diào)控的技術(shù)難度,提高系統(tǒng)的控制精度,具有很高的經(jīng)濟(jì)意義[7-8]。
本文在對(duì)六脈波雙變量交-交變頻進(jìn)行深刻的分析的基礎(chǔ)上,引用了有級(jí)調(diào)壓閉環(huán)調(diào)速的概念,并對(duì)電機(jī)的交-交變頻調(diào)速方法進(jìn)行了探索和研究,根據(jù)有級(jí)調(diào)壓閉環(huán)調(diào)速的方法,進(jìn)行了大量的理論分析、建模仿真和實(shí)驗(yàn)研究。
1 雙變量交-交變頻有級(jí)調(diào)壓閉環(huán)調(diào)速原理
1.1 雙變量控制理論
所謂的雙變量控制理論就是在單變量控制的基礎(chǔ)上增加對(duì)觸發(fā)脈沖后沿(即脈沖寬度b)進(jìn)行控制,它是雙變量控制理論的精髓[9-10]。第一個(gè)變量a角和單變量控制理論相同,用于確定觸發(fā)脈沖的觸發(fā)時(shí)刻。如果采用正弦交流電作為模擬基準(zhǔn)電壓,會(huì)產(chǎn)生交流電壓,這個(gè)電壓波形的平均包絡(luò)線就會(huì)和輸入的模擬基準(zhǔn)電壓波形精確地對(duì)應(yīng)起來。雙變量控制理論同樣是利用余弦交截法輸出電壓最接近于理想正弦電壓的原則,來實(shí)現(xiàn)觸發(fā)角和基準(zhǔn)電壓之間的余弦關(guān)系,達(dá)到輸出正弦電壓波形的目的[11]。
1.2 有級(jí)調(diào)壓閉環(huán)調(diào)速原理及優(yōu)勢(shì)
在以前的研究中,為了能夠在交-交變頻上實(shí)現(xiàn)連續(xù)調(diào)壓,統(tǒng)一采用前移或者后移觸發(fā)時(shí)刻來增大或者減小電壓的方法,控制量是觸發(fā)時(shí)刻的增量。這種方法可以實(shí)現(xiàn)轉(zhuǎn)速和電壓的連續(xù)調(diào)節(jié),可以在控制策略上加入一些復(fù)雜的算法。但是如果純粹采取這種控制方式,明顯存在當(dāng)調(diào)壓深度較深時(shí),電壓波形上會(huì)出現(xiàn)死區(qū)的缺陷,并且隨著調(diào)壓深度的加深,死區(qū)時(shí)間會(huì)變長(zhǎng),諧波含量也會(huì)增加[12-13]。
為實(shí)現(xiàn)交-交變頻器的全范圍調(diào)速,提高交-交變頻器輸出的電壓波形的質(zhì)量,本文使用有級(jí)調(diào)壓的方法彌補(bǔ)兩個(gè)頻級(jí)間的轉(zhuǎn)速空白,并且加入了閉環(huán)控制,增加了速度反饋。這樣既提高了系統(tǒng)的穩(wěn)定性,又提高了輸出電壓波形的質(zhì)量,還可以獲得較寬的調(diào)速范圍和較高的調(diào)速精度。由于采用的是有級(jí)調(diào)壓,為了避免出現(xiàn)電壓不停切換,致使出現(xiàn)轉(zhuǎn)速震蕩的現(xiàn)象,在調(diào)速的過程中,設(shè)置了一定的轉(zhuǎn)速容差,只有檢測(cè)到實(shí)際轉(zhuǎn)速與變頻器給定轉(zhuǎn)速之差大于所設(shè)容差的時(shí)候,才對(duì)電壓進(jìn)行調(diào)節(jié)。本文設(shè)置容差為3 r/min。
2 系統(tǒng)仿真模型的建立與仿真分析
根據(jù)分段變頻有級(jí)調(diào)壓閉環(huán)調(diào)速原理,結(jié)合電機(jī)的等效電路參數(shù),在Matlab/Simulink仿真軟件中建立對(duì)應(yīng)的仿真模型,并依據(jù)分段變頻有級(jí)調(diào)壓閉環(huán)變結(jié)構(gòu)調(diào)速原理對(duì)系統(tǒng)進(jìn)行仿真研究,以驗(yàn)證其實(shí)際效果[14]。
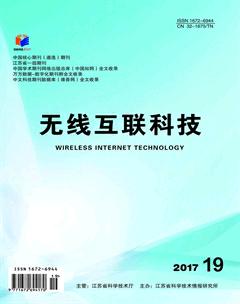
雙變量交-交變頻器有級(jí)調(diào)壓閉環(huán)調(diào)速的仿真模型如圖1所示。該系統(tǒng)可以分為六相電源部分、變頻部分、脈沖觸發(fā)部分、電機(jī)模塊、測(cè)量模塊、速度反饋、速度給定等部分。其中,速度給定是閉環(huán)調(diào)速的核心部分,速度給定與速度反饋的值經(jīng)過比較后作為脈沖觸發(fā)部分的給定,從而確定變頻器的輸出,達(dá)到精確控制系統(tǒng)轉(zhuǎn)速的目的。
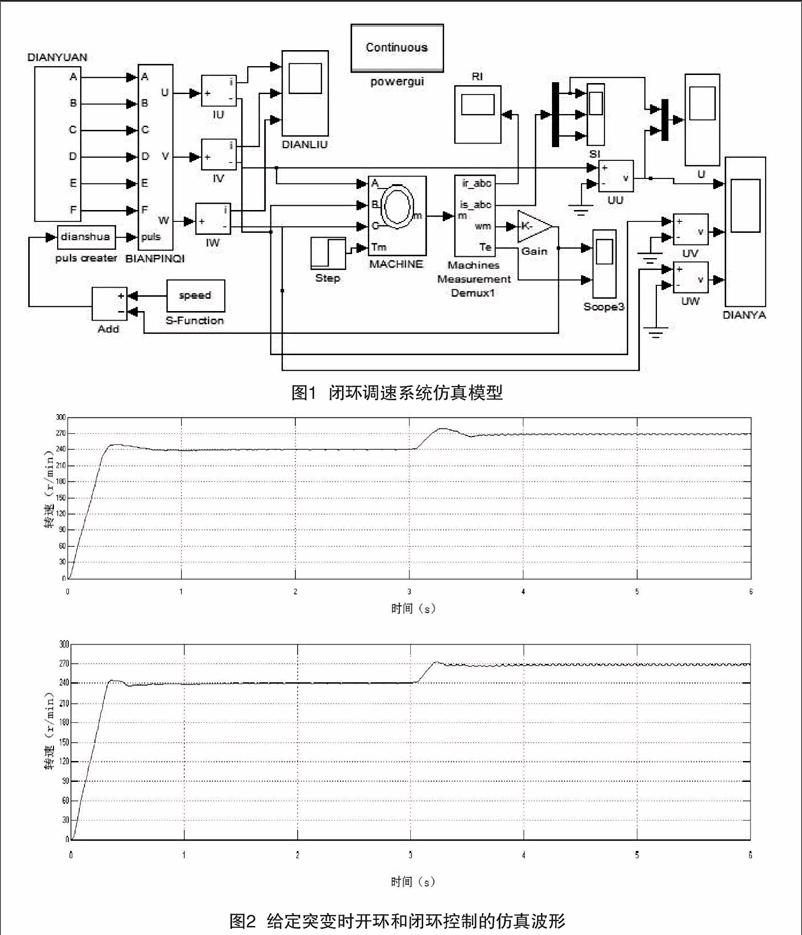
交-交變頻器的開環(huán)控制系統(tǒng)和加入有機(jī)調(diào)壓閉環(huán)調(diào)速控制策略后的轉(zhuǎn)速仿真波形如圖2所示。其中,電機(jī)的初始給定轉(zhuǎn)速為240 r/min,當(dāng)時(shí)間達(dá)到3 s時(shí),將給定轉(zhuǎn)速突變?yōu)?70 r/min,轉(zhuǎn)速的容差設(shè)置為2 r/min。
從開環(huán)與閉環(huán)調(diào)速的仿真結(jié)果可以看出:開環(huán)控制時(shí)起動(dòng)的超調(diào)較大,過渡時(shí)間為0.8 s,當(dāng)突變給定轉(zhuǎn)速后,系統(tǒng)的超調(diào)量同樣很大,經(jīng)過0.7 s后才能夠穩(wěn)定到新的給定轉(zhuǎn)速,超調(diào)量為4.1%;而加入了幾條閉環(huán)調(diào)速后的起動(dòng)過渡時(shí)間較小,為0.6 s,并且系統(tǒng)的超調(diào)量較開環(huán)時(shí)也減小,當(dāng)給定轉(zhuǎn)速突變后,系統(tǒng)能夠很快穩(wěn)定到新的給定轉(zhuǎn)速,大約經(jīng)過0.35 s,超調(diào)也明顯減小為1.8%。整體上看,加入了有級(jí)調(diào)壓閉環(huán)調(diào)速后,系統(tǒng)的超調(diào)量較開環(huán)控制有較大的減小,反應(yīng)的快速性較開環(huán)控制有很大的提高。
3 實(shí)驗(yàn)及分析
為了進(jìn)一步驗(yàn)證仿真結(jié)果,得到更直觀的結(jié)論,構(gòu)建了基于STM32的六脈波雙變量交-交變頻器有級(jí)調(diào)壓閉環(huán)調(diào)速系統(tǒng)的實(shí)驗(yàn)系統(tǒng),其系統(tǒng)框如圖3所示。系統(tǒng)的主回路由電源部分,三相變六相變壓器,晶閘管轉(zhuǎn)換電路和負(fù)載電機(jī)組成。系統(tǒng)的控制回路部分可以分為ARM及其擴(kuò)展電路、同步電路、電壓電流檢測(cè)模塊、速度反饋模塊、脈沖觸發(fā)模塊、通信接口、人機(jī)界面等模塊構(gòu)成。
在系統(tǒng)中加入有級(jí)調(diào)壓閉環(huán)調(diào)速控制策略后,突變給定轉(zhuǎn)速的實(shí)驗(yàn)波形如圖4所示,其中,初始給定轉(zhuǎn)速是650 r/min,待系統(tǒng)運(yùn)行一定時(shí)間,系統(tǒng)的運(yùn)行狀態(tài)完全穩(wěn)定后,將系統(tǒng)的速度給定編為600 r/min,從圖中可以看出:由于加入了閉環(huán)調(diào)速的控制策略,系統(tǒng)的啟動(dòng)過程比較快,能夠迅速達(dá)到給定轉(zhuǎn)速,并且啟動(dòng)過程中超調(diào)量很小;當(dāng)速度給定突變時(shí),系統(tǒng)能夠很快穩(wěn)定到新的給定轉(zhuǎn)速,轉(zhuǎn)速?zèng)]有很大的波動(dòng),超調(diào)量小,對(duì)轉(zhuǎn)速數(shù)據(jù)進(jìn)行采集分析可以得出,系統(tǒng)在給定突變時(shí),能夠在0.8 s內(nèi)將轉(zhuǎn)速從650 r/min減小到600 r/min的穩(wěn)定狀態(tài),總的超調(diào)量為0.5%,在系統(tǒng)給定的容差范圍內(nèi)。
總的來說,在加入了雙變量交-交變頻有級(jí)調(diào)壓閉環(huán)調(diào)速控制策略后,系統(tǒng)的響應(yīng)速度得到了很大的提高,超調(diào)量減少,系統(tǒng)的穩(wěn)定性也得到了提升。endprint
4 結(jié)語
仿真和實(shí)驗(yàn)結(jié)果驗(yàn)證了有級(jí)調(diào)壓閉環(huán)調(diào)速控制策略的可行性,在系統(tǒng)中加入該控制策略后,系統(tǒng)的響應(yīng)速度得到了明顯的提高,系統(tǒng)的超調(diào)量也明顯減小,從而提高了系統(tǒng)的控制精度,增強(qiáng)了系統(tǒng)的穩(wěn)定性。因此,雙變量交-交變頻器閉環(huán)調(diào)速有級(jí)調(diào)壓控制策略可以推廣到工業(yè)應(yīng)用中,具有一定的應(yīng)用前景。
[參考文獻(xiàn)]
[1]陳伯時(shí).電力拖動(dòng)自動(dòng)控制系統(tǒng)[M].北京:機(jī)械工業(yè)出版社,2003.
[2]潘天文.六脈波雙變量轉(zhuǎn)子變頻與定子變頻特性對(duì)比的研究[D].焦作:河南理工大學(xué),2012.
[3]汪海波,周波,方斯琛.永磁同步電機(jī)調(diào)速系統(tǒng)的滑模控制[J].電工技術(shù)學(xué)報(bào),2009(9):75-81.
[4]孫素琴,蔣周士,周海平,等.電力系統(tǒng)動(dòng)態(tài)等值中原動(dòng)機(jī)調(diào)速系統(tǒng)聚合的研究[J].電力系統(tǒng)保護(hù)與控制,2009(12):33-37.
[5]張輝,蒲天驕,王剛,等.基于實(shí)測(cè)頻率軌跡的機(jī)組調(diào)速器參數(shù)辨識(shí)[J].電力系統(tǒng)保護(hù)與控制,2014(1):24-33.
[6]曹成杰,莫岳平.基于現(xiàn)代智能控制技術(shù)的水輪機(jī)自適應(yīng)工況PID調(diào)速器研究[J].電力系統(tǒng)保護(hù)與控制,2010(3):81-85.
[7]白玉成,唐小琦,吳功平.內(nèi)置式永磁同步電機(jī)弱磁調(diào)速控制[J].電工技術(shù)學(xué)報(bào),2011(9):54-59.
[8]李政,李興源,王渝紅,等.轉(zhuǎn)子角動(dòng)量分析及其在一次調(diào)頻中的應(yīng)用[J].電工技術(shù)學(xué)報(bào),2011(23):39-43.
[9]杜慶楠,王新.晶閘管相控變流器及變頻器的雙變量相控制理論[M].北京:煤炭工業(yè)出版社,2006.
[10]李高舉.定轉(zhuǎn)子分段變頻有級(jí)調(diào)壓閉環(huán)調(diào)速系統(tǒng)研究[D].焦作:河南理工大學(xué),2011.
[11]李華德.交流調(diào)速控制系統(tǒng)[M].北京:電子工業(yè)出版社,2007.
[12]張迪凡,杜慶楠,徐高杰.繞線機(jī)轉(zhuǎn)子側(cè)交-交變頻調(diào)速的機(jī)械特性研究[J].電測(cè)與儀表,2010(540):20-23.
[13]王兆安,黃俊.電力電子技術(shù)[M].北京:機(jī)械工業(yè)出版社,2000.
[14]KUNZ UH,MUELLER H. 3-Phase induction motor fed by cycloconverter with reduced reaction on power supply[C].Chicago:Proceedings of the International MOTORCON Conference,1985.endprint