水下無人航行器聲學系統實收實發聲隔離度分析研究
2017-10-25 12:44:10趙龍龍
聲學技術 2017年3期
趙龍龍
?
水下無人航行器聲學系統實收實發聲隔離度分析研究
趙龍龍
(廣東湛江91388部隊,廣東湛江524022)
對某水下無人航行器聲學系統在特定間距及頻段條件下實收實發聲隔離度進行了分析研究。在分析某水下無人航行器載體基本結構特征的基礎上,通過ANSYS有限元建模仿真軟件,對航行器聲學系統實現實收實發的指向性和隔離度進行了仿真計算,并在消聲水池對航行器聲學系統實收實發隔離度進行了實驗測試。研究結果表明,收發間距為3 m時具有一定的收發隔離度,若對隔離度有更高要求,則需采取調整收發換能器間距或對接收水聽器加裝吸聲障板等技術措施,可為水下無人航行器聲學系統設計及實現實收實發提供技術支持。
水下無人航行器;水聲;實收實發;聲隔離度
0 引言
隨著技術的進步與發展,水下無人航行器(Underwater Unmanned Vehicle,UUV)自身具備的能力越來越強,其應用領域也越來越廣泛。作為一個成熟的水下機動搭載平臺,水下無人航行器可以搭載不同設備,完成所賦予的各種水下使命任務。如美國海軍已裝備了數百條執行各種任務的水下無人航行器,作為其水面艦艇、潛艇的“助手”實施水下作戰[1]。
在水下活動式聲學模擬裝置的設計使用中,水下無人航行器可搭載不同功能的水聲換能器,用于模擬水下目標的聲學特性。由于水下環境的復雜性和航行器自噪聲的影響,在載體上通過換能器實現水聲信號實收實發并達到較好的聲隔離度與指向性指標,還需要開展深入細致的研究。所謂實收實發技術[2-3],即在聲學系統發射回波信號的同時接收主動探測信號,另外某些聲學系統在此基礎上同時一直發射模擬噪聲。實收實發技術的優點是系統在發射應答信號時,不關閉接收機,從而實現在正常發射回波信號的同時測量來襲目標的信號頻率。該技術一般應用于“智能型”聲誘餌的工程實現。聲隔離度定義為聲學系統中接收換能器接收到信號的聲源級(dB)與系統發射信號聲源級(dB)的差值,用表示,其表達式為:=1-2,其中1為聲學系統接收端換能器接收到的來襲目標主動信號聲源級,2為聲學系統發射的回波信號聲源級。聲隔離度主要受收發距離、發射及接收換能器的指向性、信號處理方法等因素影響。
本文在分析某水下無人航行器聲學系統基本結構特征的基礎上,通過ANSYS有限元建模仿真軟件,對航行器聲學系統實現實收實發的指向性和聲隔離度進行了仿真計算,并在消聲水池對航行器實收實發隔離度進行了等效模型實驗研究,研究結果可為水下無人航行器聲學系統設計及實現實收實發提供支持。
1 水下無人航行器收發結構
某水下無人航行器外形及收發換能器安裝布置示意圖如圖1所示。

圖1 水下無人航行器換能器布置示意圖
為在水下無人航行器載體上實現對水聲信號的實收實發,同時考慮尾部載體推進噪聲的影響,在頭部布置接收換能器,尾部布置發射換能器。在考慮航行器載體功能實現的基礎上,兩者之間的間距盡量增大,載體本體具備一定的聲隔離性,但在載體上實現實收實發功能的聲隔離效果能否達到相關要求,還需通過仿真及實驗進行研究分析。
2 聲隔離建模仿真
2.1 仿真軟件
ANSYS有限元軟件是目前比較流行的有限元分析軟件之一,它能解決工程中諸多學科的形形色色的實際問題,功能非常全面,如結構力學、電磁場、流體力學、熱學、耦合場(多種物理場之間的相互耦合)等問題[4]。與換能器設計的有關問題主要是結構分析、流體-結構耦合分析、壓電耦合分析,有時候還需用到電磁場分析、熱分析等功能。用ANSYS軟件進行聲學仿真的步驟如圖2所示。
2.2 有限元模型
分析無人水下航行器收發換能器安裝使用位置,簡化分析對象,采用ANSYS仿真軟件,在APDL (ANSYS Parametric Design Language)方式下進行二維對稱建模[4-5],可建立如圖3所示的聲隔離仿真模型,圖3(a)為二維圖,圖3(b)為網格化后的有限元分析模型。

圖2 ANSYS軟件進行聲學仿真一般步驟

(a) 二維圖???? (b) 有限元模型
圖3中,假定接收指向性圓弧與換能器的距離為3 m,殼體距測試點為0.22 m,以模擬水下無人航行器的收發換能器布置條件。
2.3 仿真數據
經ANSYS有限元仿真分析,假定信號頻段為14~38 kHz,仿真分析聲障板對接收指向性的影響如圖4所示。
由圖4可知,隨著頻率的升高,聲障板對接收換能器的指向性影響增大。通過仿真結果可以看出,在14~38 kHz范圍內,聲學隔離度在17~24 dB左右。但仿真是在理想情況下,發射不受任何干擾,實際使用中發射換能器在航行器載體上,接收器在前方的透聲罩內,受到透聲罩內部結構的影響,指向性開角及起伏具有很大的不確定性。

(a)14 kHz???? (b)16 kHz
(c)18 kHz ????(d)22 kHz

(e)26 kHz????(f)30 kHz
(g)34 kHz????(h)38 kHz
圖4 不同頻點聲障板對接收指向性的影響
Fig.4 The effects of acoustical baffle on reception directivity at different frequency spots
3 聲隔離水池實驗
3.1 實驗布置
在進行仿真建模分析后,利用現有條件在水池開展相關實驗驗證[6-7],水池布置示意圖如圖5所示。
圖5中消聲水池尺寸為10 m(寬)×23 m(長)×8 m(深)。使用水池自動化測試系統、數據采集器、信號源、功率放大器、濾波器、發射換能器、標準水聽器等構建的實驗環境如圖5所示。

圖5 聲隔離水池實驗布置示意圖
3.2 實驗數據
按圖5所示的實驗布置,將聲障板通過夾具固定在水池旋轉裝置上,水聽器安裝布置與仿真條件相同,即其在距障板前端面中軸線0.22 m處,水聽器及發射換能器布放在水池中相距3 m,水深為3 m,從而模擬在航行器載體上的換能器布置。信號源經功放和發射換能器發射頻率范圍為14~38 kHz的正弦連續信號,接收水聽器圍繞發射換能器以3 m半徑旋轉,接收信號并經濾波器濾波放大后送入水池自動化測試系統。對14~38 kHz寬頻帶換能器指向性進行測量,主要測量結果如圖6所示。
圖6中340°方向為聲障板軸線頭部方向,160°為障板軸線尾部朝向方向。
(a)14 kHz ????(b)16 kHz
(c)18 kHz????(d)22 kHz

(e)26 kHz????(f)30 kHz
(g)34 kHz????(h)38 kHz
圖6 接收水聽器不同頻率點的指向性
Fig.6 The directivities of receiving hydrophone at different frequency spots
3.3 數據分析
(1) 單獨考慮接收水聽器在障板影響下的指向性,在14~38 kHz帶寬內,指向性隨頻率變化而變化。接收水聽器既要保證在正橫方向較寬開角,又要在14~38 kHz寬頻帶內與發射換能器具有高隔離度是較困難的。
(2) 由實驗結果可知,發射換能器與水聽器在14~38 kHz寬帶內,聲學隔離度為15~19 dB左右。若發射換能器指向性在14~38 kHz寬帶內具有8~10 dB的指向性隔離度,那么系統隔離度大約在23~29 dB。
(3) 接收水聽器指向性在反聲障板影響下隨頻率變化,起伏較大,部分頻率點起伏大于9 dB,會導致航行器載體模擬水下目標強度的誤差較大。
4 仿真實驗數據比對
4.1 數據比對圖
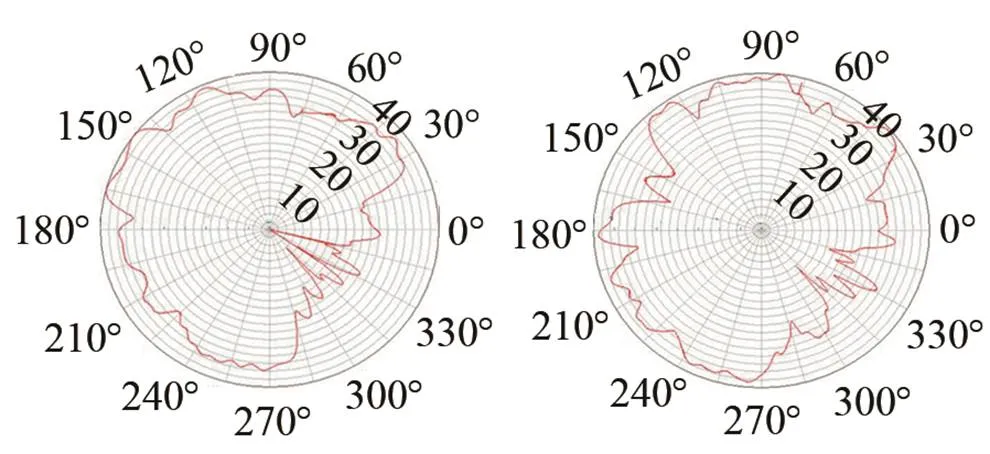
對仿真及實驗數據進行處理,形成的仿真及實驗數據對比圖如圖7所示,其中紅線為仿真數據,藍線為實驗數據。
4.2 數據比對分析
(1) 通過仿真與實驗聲隔離仿真數據顯示,在14~38 kHz范圍內,聲學隔離度在17~24 dB左右。而在實際測試中,發射換能器與水聽器在14~38 kHz寬帶內,聲學隔離度在15~19 dB左右。

(a)14 kHz????(b)16 kHz
(c)18 kHz????(d)22 kHz

(e)26 kHz ????(f)30 kHz
(g)34 kHz????(h)38 kHz
圖7 聲隔離仿真及實驗數據對比圖
Fig.7 The collation map of acoustic isolation simulation and experimental data
(2) 仿真和試驗中聲障板對接收的影響趨勢相似,但是實際中受到測試條件或其它因素影響,隔離度減弱而且指向性開角更小。單獨考慮接收水聽器在載體障板影響下的指向性,在14~38 kHz帶寬內,接收水聽器既要在航行器正橫方向有較寬的開角,又要在14~38 kHz寬頻帶內與發射換能器具有較高的隔離度是比較困難的。
5 結論
水下無人航行器載體聲信號實收實發實現了較好的聲隔離度,對航行器功能的拓展和使用具有重要的作用和意義。結合某水下無人航行器載體收發換能器的布置參數,在特定間距及頻段條件下,對航行器載體實收實發進行了ANSYS建模仿真及水池實驗測試。需要指出的是,文中的實驗和有限元模型直接結果均已包含3 m的距離傳播損失影響。通過比對仿真實驗數據,表明在該尺度下具有一定的收發隔離度,若對隔離度有更高要求,則需采取調整收發換能器間距或對接收水聽器加裝吸聲障板等技術措施。
[1] 陳強. 水下無人航行器[M]. 北京: 國防工業出版社, 2014, 1: 1-20. CHEN Qiang. Unmanned underwater vehicle[M]. Beijing: National Defence Industry Press, 2014, 1: 1-20.
[2] 吳培榮. 基于邊收邊發技術的聲隔離度研究[J]. 聲學技術, 2013, 32(4): 281-283.WU Peirong.Research on isolation degree of ‘receiving and sending’ technique[J]. Technical Acoustics, 2013, 32(4): 281-283.
[3] 周益明, 王建中, 張濤. 一種新型聲隔離系統[J]. 聲學技術, 2013, 32(6): 151-155. ZHOU Yiming, WANG Jianzhong, ZHANG Tao. A new type of sound isolation system[J]. Technical Acoustics, 2013, 32(6): 151-155.
[4] 龔曙光, 謝桂蘭, 黃云清. ANSYS參數化編程與命令手冊[M]. 北京: 機械工業出版社, 2009, 10: 1-4. GONG Shuguang, XIE Guilan, HUANG yunqing. ANSYS Operation command and parametric programming reference[M]. Beijing: China Machine Press, 2009, 10: 1-4.
[5] 莫喜平. 用ANSYS有限元軟件模擬分析聲學換能器[R]. 北京: 中國科學院聲學研究所, 2004: 11-17. MO Xiping. Simulation analysis of acoustic transducer with ANSYS finite element software[R]. Beijing: Acoustics of Chinese Academy of Sciences, 2004: 11-17.
[6] 李留成, 賈同民, 王瑜, 等. 魚雷制造技術[M]. 北京: 國防工業出版社, 2011, 7: 313-323. LI Liucheng, JIA Tongmin, WANG Yu, et al. Torpedo manufacture technique[M]. Beijing: National Defence Industry Press, 2011, 7: 313-323.
[7] 汪德昭, 尚爾昌. 水聲學[M]. 2版. 北京: 科學出版社, 2013, 7: 560-561. WANG Dezhao, SHANG Erchang. Underwater Acoustics[M]. 2nd edition. Beijing: Science Press, 2013, 7: 560-561.
Analysis of underwater acoustic isolation effect for real-time receiving and sending of UUV acoustic system
ZHAO Long-long
(Unit913888, PLA, Zhanjiang 524022, Guangdong, China)
The acoustic isolation degree between real-time receiving and sending of an underwater unmanned vehicle is analyzed in the specific separation and frequency range. Based on analyzing the structure characteristics of an underwater unmanned vehicle, underwater acoustic isolation effect for real-time receiving and sending of Underwater Unmanned Vehicle (UUV) acoustic system is simulated by the software ANSYS, and the corresponding isolation testing experiment is carried out in anechoic tank. The results showthat the spacing of 3 meters provides a certain degree of acoustic isolation, if a higher degree of isolation is required, it will be necessary to adjust the distance between receiving and transmitting transducer, or add acoustical baffle for the receiving transducer,or take other technical measures.The results of the research can provide a technical support for the design and implementation of underwater unmanned vehicle acoustic system to achieve real-time receiving and sending.
underwater unmanned vehicle; underwater acoustic; real-time receive and send; acoustic isolation
TB565
A
1000-3630(2017)-03-0228-05
10.16300/j.cnki.1000-3630.2017.03.006
2016-10-24;
2016-12-12
趙龍龍(1976-), 男, 遼寧本溪人, 碩士, 高級工程師, 研究方向為水聲工程。
趙龍龍, E-mail: zhao_ll20000@163.com
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
上海節能(2020年3期)2020-04-13 13:16:16
裝備制造技術(2019年12期)2019-12-25 03:06:00
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
天津醫科大學學報(2019年6期)2019-08-13 07:04:32
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
